KR20190105155A - 차량의 속도 설정 장치 및 방법 - Google Patents
차량의 속도 설정 장치 및 방법Info
- Publication number
- KR20190105155A KR20190105155A KR1020180019683A KR20180019683A KR20190105155A KR 20190105155 A KR20190105155 A KR 20190105155A KR 1020180019683 A KR1020180019683 A KR 1020180019683A KR 20180019683 A KR20180019683 A KR 20180019683A KR 20190105155 A KR20190105155 A KR 20190105155A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- processor
- driver
- speed
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- G06K9/00798—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0818—Inactivity or incapacity of driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/42—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/06—Direction of travel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/30—Auxiliary equipments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
도 2는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치에 포함된 프로그램 모듈의 구성을 나타내는 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 4는 본 발명의 일 실시 예에 따른 차량의 속도 설정 장치의 예시적인 동작을 설명하기 위한 도면이다.
도 5는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 6은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 7은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 8은 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 9는 본 발명의 일 실시 예에 따른 차량의 속도 설정 방법을 설명하기 위한 순서도이다.
도 10은 본 발명의 일 실시 예에 따른 컴퓨팅 시스템을 도시한다.

Claims (14)
- 차량의 속도 설정 장치에 있어서,
상기 차량의 내부를 촬영하도록 배치된 제1 카메라;
상기 차량의 외부를 촬영하도록 배치된 제2 카메라;
내비게이션; 및
상기 제1 카메라, 상기 제2 카메라 및 상기 내비게이션과 전기적으로 연결된 프로세서를 포함하고,
상기 프로세서는,
상기 차량의 조향 장치에 대한 조작, 상기 차량의 감속 장치에 대한 조작, 상기 차량의 가속 장치에 대한 조작 또는 상기 제1 카메라에 의해 획득된 영상 중 적어도 일부에 기초하여 상기 차량의 운전자의 부주의를 감지하고,
상기 운전자의 부주의가 감지되면, 상기 제2 카메라에 의해 획득된 영상, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트, 상기 차량의 주변 차량의 궤적 또는 상기 내비게이션에 의해 획득된 상기 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 상기 도로의 차선과 연관된 정보 및 상기 주변 차량과 연관된 정보 중 적어도 일부를 획득하고,
상기 획득된 정보에 기초하여 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
제1 시간 구간 동안 상기 조향 장치에 대한 상기 운전자의 조작이 없고, 제2 시간 구간 동안 상기 감속 장치 또는 상기 가속 장치에 대한 상기 운전자의 조작이 없고, 상기 제1 카메라에 의해 촬영된 영상에 기초하여 상기 운전자가 상기 차량의 전방을 주시하지 않는 것으로 판단되면, 상기 운전자의 부주의를 감지하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
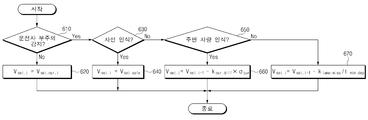
상기 운전자의 부주의가 감지된 후, 상기 차선이 인식되면, 상기 감속 제어의 목표 속도를 지정된 속도로 설정하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
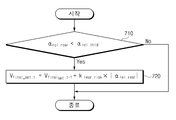
상기 운전자의 부주의가 감지된 후, 상기 차선 및 상기 주변 차량이 미인식되면, 상기 운전자의 부주의가 감지되기 이전에 인식된 차선, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트 및 상기 내비게이션으로부터 수신된 상기 도로의 곡률에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 4 항에 있어서,
상기 프로세서는,
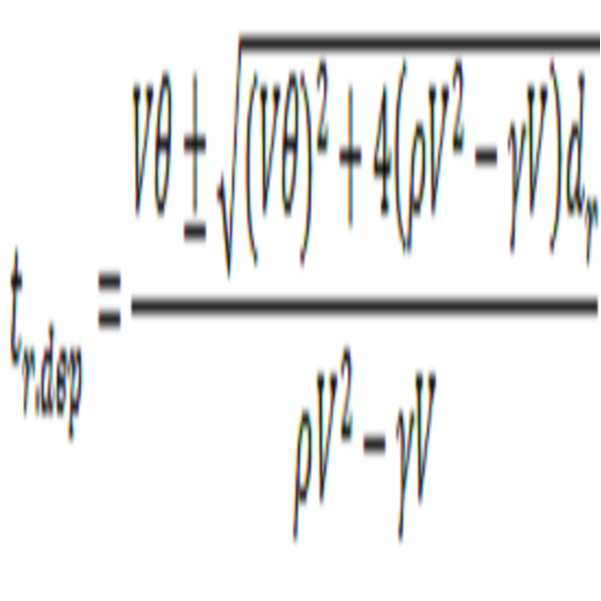
상기 운전자의 부주의가 감지되기 이전에 인식된 차선, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트 및 상기 도로의 곡률에 기초하여 상기 인식된 차선으로부터의 이탈 예상 시간을 산출하고,
상기 이탈 예상 시간에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 5 항에 있어서,
상기 프로세서는,
상기 이탈 예상 시간 및 미리 설정된 파라미터에 기초하여 상기 감속 제어의 목표 속도를 설정하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 운전자의 부주의가 감지된 후, 상기 차선이 미인식되고 상기 주변 차량이 인식되면, 상기 주변 차량의 이동 궤적과 상기 내비게이션으로부터 수신된 상기 도로의 곡률을 비교하고,
상기 비교 결과에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 7 항에 있어서,
상기 프로세서는,
상기 주변 차량의 이동 궤적과 상기 도로의 곡률 사이의 유클리디안 거리를 산출하고,
상기 유클리디안 거리에 기초하여 상기 감속 제어를 수행하는 것을 특징으로 하는, 장치. - 제 7 항에 있어서,
상기 프로세서는,
상기 비교 결과 및 미리 설정된 파라미터에 기초하여 상기 감속 제어의 목표 속도를 설정하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 차량의 후방 차량의 가속도에 기초하여 상기 감속 제어의 목표 속도를 변경하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
상기 프로세서는,
상기 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 상기 감속 제어의 목표 속도를 변경하는 것을 특징으로 하는, 장치. - 제 1 항에 있어서,
외부 장치와 통신하는 통신 회로를 더 포함하고,
상기 프로세서는,
상기 감속 제어가 수행되면, 상기 통신 회로를 이용하여 자동적으로 긴급 통보를 발신하는 것을 특징으로 하는, 장치. - 제 12 항에 있어서,
상기 프로세서는,
상기 차량의 후방 차량의 가속도 또는 상기 차량과 측방으로 인접한 주변 차량의 속도에 기초하여 상기 감속 제어의 목표 속도를 변경하고,
상기 변경 전 목표 속도 및 상기 변경된 목표 속도에 기초하여 상기 긴급 통보의 발신 여부를 결정하는 것을 특징으로 하는, 장치. - 차량의 속도 설정 방법에 있어서,
상기 차량의 조향 장치에 대한 조작, 상기 차량의 감속 장치에 대한 조작, 상기 차량의 가속 장치에 대한 조작 또는 상기 차량의 내부를 촬영하는 카메라에 의해 촬영된 영상 중 적어도 일부에 기초하여 상기 차량의 운전자의 부주의를 감지하는 단계;
상기 운전자의 부주의가 감지되면, 상기 차량의 외부를 촬영하는 카메라에 의해 획득된 영상, 상기 차량의 헤딩각, 상기 차량의 속도, 상기 차량의 요레이트, 상기 차량의 주변 차량의 궤적 또는 상기 차량이 주행 중인 도로의 곡률 중 적어도 일부에 기초하여 상기 도로의 차선과 연관된 정보 및 상기 주변 차량과 연관된 정보 중 적어도 일부를 획득하는 단계; 및
상기 획득된 정보에 기초하여 감속 제어를 수행하는 단계를 포함하는 것을 특징으로 하는, 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180019683A KR102463722B1 (ko) | 2018-02-20 | 2018-02-20 | 차량의 속도 설정 장치 및 방법 |
| US16/203,685 US10882519B2 (en) | 2018-02-20 | 2018-11-29 | Apparatus and method for setting speed of vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180019683A KR102463722B1 (ko) | 2018-02-20 | 2018-02-20 | 차량의 속도 설정 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190105155A true KR20190105155A (ko) | 2019-09-16 |
| KR102463722B1 KR102463722B1 (ko) | 2022-11-07 |
Family
ID=67617598
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180019683A Active KR102463722B1 (ko) | 2018-02-20 | 2018-02-20 | 차량의 속도 설정 장치 및 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10882519B2 (ko) |
| KR (1) | KR102463722B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112428989A (zh) * | 2020-10-30 | 2021-03-02 | 惠州华阳通用电子有限公司 | 一种车辆控制方法 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102463722B1 (ko) * | 2018-02-20 | 2022-11-07 | 현대자동차주식회사 | 차량의 속도 설정 장치 및 방법 |
| KR102496290B1 (ko) | 2018-07-06 | 2023-02-06 | 현대모비스 주식회사 | 헤딩각 보상 장치 및 방법 |
| JP7119984B2 (ja) * | 2018-12-21 | 2022-08-17 | トヨタ自動車株式会社 | 運転支援装置、車両、情報提供装置、運転支援システム、及び運転支援方法 |
| WO2020213638A1 (ja) * | 2019-04-18 | 2020-10-22 | 日本電気株式会社 | 人物特定装置、人物特定方法および記録媒体 |
| JP7838505B2 (ja) * | 2023-03-15 | 2026-04-01 | トヨタ自動車株式会社 | 車両制御装置、車両制御方法及びプログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008077309A (ja) * | 2006-09-20 | 2008-04-03 | Denso Corp | 車両制御装置 |
| KR20130054660A (ko) * | 2011-11-17 | 2013-05-27 | 현대모비스 주식회사 | 차량의 전방 영상 및 측방 영상을 이용한 차선 인식 향상 시스템 및 그 방법 |
| KR101502510B1 (ko) * | 2013-11-26 | 2015-03-13 | 현대모비스 주식회사 | 차량의 차선 유지 제어 장치 및 방법 |
| KR20150051678A (ko) * | 2013-11-05 | 2015-05-13 | 현대모비스 주식회사 | Lkas와 카메라를 이용한 차량 사고 방지 장치 및 방법 |
| KR20150143139A (ko) * | 2014-06-13 | 2015-12-23 | 현대모비스 주식회사 | 차량용 운전자 위험 지수 관리 시스템 및 그 방법 |
| JP2016193683A (ja) * | 2015-04-01 | 2016-11-17 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018020692A (ja) * | 2016-08-04 | 2018-02-08 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018024344A (ja) * | 2016-08-10 | 2018-02-15 | 株式会社Subaru | 車両の走行制御装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003034240A (ja) * | 2001-07-25 | 2003-02-04 | Honda Motor Co Ltd | 車両の制動制御装置 |
| DE10227221A1 (de) * | 2002-06-18 | 2004-01-15 | Daimlerchrysler Ag | Verfahren zur Überwachung des Innen- bzw. Außenraums eines Fahrzeugs sowie ein Fahrzeug mit wenigstens einer Rundsichtkamera |
| WO2005037592A1 (de) * | 2003-09-23 | 2005-04-28 | Daimlerchrysler Ag | Verfahren und vorrichtung zur erkennung von spurwechselvorgängen für ein fahrzeug |
| JP4534754B2 (ja) * | 2004-12-21 | 2010-09-01 | 日産自動車株式会社 | 車線逸脱防止装置 |
| US7805232B2 (en) * | 2007-06-07 | 2010-09-28 | Gm Global Technology Operations, Inc. | Adaptive electronic brake system control apparatus and method |
| US9542847B2 (en) * | 2011-02-16 | 2017-01-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Lane departure warning/assistance method and system having a threshold adjusted based on driver impairment determination using pupil size and driving patterns |
| US8981942B2 (en) * | 2012-12-17 | 2015-03-17 | State Farm Mutual Automobile Insurance Company | System and method to monitor and reduce vehicle operator impairment |
| US9751534B2 (en) * | 2013-03-15 | 2017-09-05 | Honda Motor Co., Ltd. | System and method for responding to driver state |
| US9420958B2 (en) * | 2013-03-15 | 2016-08-23 | Honda Motor Co., Ltd. | System and method for determining changes in a body state |
| CN105324804A (zh) | 2013-05-31 | 2016-02-10 | 日立汽车系统株式会社 | 车辆用危险警报控制装置 |
| EP3041720B1 (en) * | 2013-09-05 | 2019-12-04 | Robert Bosch GmbH | Enhanced lane departure warning with information from rear radar sensors |
| EP3044061B1 (en) | 2013-09-11 | 2019-04-17 | Robert Bosch GmbH | Modifying adaptive cruise control to mitigate rear-end collisions |
| US9656673B2 (en) * | 2013-12-04 | 2017-05-23 | Mobileye Vision Technologies Ltd. | Systems and methods for navigating a vehicle to a default lane |
| KR101519287B1 (ko) | 2014-02-14 | 2015-05-11 | 현대자동차주식회사 | 차량 충돌 방지 장치 및 그 방법 |
| JP2016001464A (ja) * | 2014-05-19 | 2016-01-07 | 株式会社リコー | 処理装置、処理システム、処理プログラム、及び、処理方法 |
| CN113158820B (zh) * | 2014-08-18 | 2024-07-16 | 无比视视觉技术有限公司 | 在导航中对车道限制和施工区域的识别和预测 |
| KR20160023193A (ko) | 2014-08-21 | 2016-03-03 | 현대자동차주식회사 | 긴급 제동 시스템에서 전방위 확장 적용을 위한 충돌 위험 판단 방법 및 장치 |
| JP6481196B2 (ja) | 2014-09-10 | 2019-03-13 | 三菱自動車工業株式会社 | ブレーキ制御装置 |
| US10166992B2 (en) * | 2015-05-22 | 2019-01-01 | Toyota Motor Engineering & Manufacturing North America, Inc. | Impairment evaluation system |
| JP6553470B2 (ja) | 2015-09-29 | 2019-07-31 | 株式会社Subaru | 危険度算出装置 |
| US9840253B1 (en) * | 2016-06-14 | 2017-12-12 | Delphi Technologies, Inc. | Lane keeping system for autonomous vehicle during camera drop-outs |
| US10290210B2 (en) * | 2017-01-11 | 2019-05-14 | Toyota Motor Engineering & Manufacturing North America, Inc. | Distracted driver notification system |
| EP3638542B1 (en) * | 2017-06-16 | 2022-01-26 | Nauto, Inc. | System and method for contextualized vehicle operation determination |
| US11163309B2 (en) * | 2017-11-30 | 2021-11-02 | Direct Current Capital LLC | Method for autonomous navigation |
| KR102463722B1 (ko) * | 2018-02-20 | 2022-11-07 | 현대자동차주식회사 | 차량의 속도 설정 장치 및 방법 |
| US11216748B2 (en) * | 2018-06-11 | 2022-01-04 | Traxen, Inc. | Predictive control techniques for ground vehicles |
-
2018
- 2018-02-20 KR KR1020180019683A patent/KR102463722B1/ko active Active
- 2018-11-29 US US16/203,685 patent/US10882519B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008077309A (ja) * | 2006-09-20 | 2008-04-03 | Denso Corp | 車両制御装置 |
| KR20130054660A (ko) * | 2011-11-17 | 2013-05-27 | 현대모비스 주식회사 | 차량의 전방 영상 및 측방 영상을 이용한 차선 인식 향상 시스템 및 그 방법 |
| KR20150051678A (ko) * | 2013-11-05 | 2015-05-13 | 현대모비스 주식회사 | Lkas와 카메라를 이용한 차량 사고 방지 장치 및 방법 |
| KR101502510B1 (ko) * | 2013-11-26 | 2015-03-13 | 현대모비스 주식회사 | 차량의 차선 유지 제어 장치 및 방법 |
| KR20150143139A (ko) * | 2014-06-13 | 2015-12-23 | 현대모비스 주식회사 | 차량용 운전자 위험 지수 관리 시스템 및 그 방법 |
| JP2016193683A (ja) * | 2015-04-01 | 2016-11-17 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018020692A (ja) * | 2016-08-04 | 2018-02-08 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2018024344A (ja) * | 2016-08-10 | 2018-02-15 | 株式会社Subaru | 車両の走行制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112428989A (zh) * | 2020-10-30 | 2021-03-02 | 惠州华阳通用电子有限公司 | 一种车辆控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190256085A1 (en) | 2019-08-22 |
| KR102463722B1 (ko) | 2022-11-07 |
| US10882519B2 (en) | 2021-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106166951B (zh) | 车速限制装置以及车速控制装置 | |
| KR102463722B1 (ko) | 차량의 속도 설정 장치 및 방법 | |
| EP3052961B1 (en) | Adaptive cruise control with on-ramp detection | |
| JP6158523B2 (ja) | 車間距離制御装置 | |
| US11427166B2 (en) | Adaptive AEB system considering steerable path and control method thereof | |
| US10471960B2 (en) | Adaptive cruise control apparatus and method of operating adaptive cruise control in consideration of traffic condition | |
| US11433888B2 (en) | Driving support system | |
| US20120078484A1 (en) | Vehicle cruise control apparatus | |
| JP2005524135A (ja) | 車両における横ガイド支援方法及びその装置 | |
| US10040449B2 (en) | Method for avoiding a rear-end collision between a first vehicle and a second vehicle and control unit | |
| JP6494020B2 (ja) | 車両の運転支援制御装置 | |
| JP2017117192A (ja) | 運転支援装置 | |
| CN112046476B (zh) | 车辆控制装置及其动作方法、车辆以及存储介质 | |
| CN112714718B (zh) | 车辆控制方法及车辆控制装置 | |
| US12157467B2 (en) | Driving assist method and driving assist device for detecting cut-in vehicle when host vehicle is stopped | |
| WO2021235043A1 (ja) | 車両制御装置 | |
| CN115440069B (zh) | 信息处理服务器、信息处理服务器的处理方法、非易失性存储介质 | |
| JP2016078730A (ja) | 車両走行制御装置 | |
| KR20200082457A (ko) | A d a s 알람 출력 제어 방법 및 장치 | |
| KR102526079B1 (ko) | 차량 및 그 제어방법 | |
| US20230242108A1 (en) | Vehicle control apparatus | |
| KR20250128377A (ko) | 적응형 속도 제어기를 작동하기 위한 방법 | |
| US11524681B2 (en) | Control apparatus for vehicle, control method for vehicle, and computer-read able recording medium | |
| KR20240054006A (ko) | 차량 제어 장치 및 방법 | |
| KR20220092303A (ko) | 차량 및 그 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |