KR20190124558A - 무한 트랙 모듈 및 이를 갖는 장치 - Google Patents
무한 트랙 모듈 및 이를 갖는 장치 Download PDFInfo
- Publication number
- KR20190124558A KR20190124558A KR1020180048680A KR20180048680A KR20190124558A KR 20190124558 A KR20190124558 A KR 20190124558A KR 1020180048680 A KR1020180048680 A KR 1020180048680A KR 20180048680 A KR20180048680 A KR 20180048680A KR 20190124558 A KR20190124558 A KR 20190124558A
- Authority
- KR
- South Korea
- Prior art keywords
- film
- display panel
- panel
- stage
- vacuum plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/33—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations into and out of processing chamber
- H10P72/3314—Continuous loading and unloading into and out of a processing chamber, e.g. transporting belts within processing chambers
-
- H01L21/6776—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/061—Lifting, gripping, or carrying means, for one or more sheets forming independent means of transport, e.g. suction cups, transport frames
-
- H01L21/67706—
-
- H01L21/67712—
-
- H01L51/56—
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K71/00—Manufacture or treatment specially adapted for the organic devices covered by this subclass
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3202—Mechanical details, e.g. rollers or belts
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3206—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations the substrate being handled substantially vertically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0214—Articles of special size, shape or weigh
- B65G2201/022—Flat
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Liquid Crystal (AREA)
- Devices For Indicating Variable Information By Combining Individual Elements (AREA)
Abstract
Description
도 2는 도 1에 도시된 무한 트랙 모듈을 설명하기 위한 개략적인 정면도이다.
도 3은 도 1에 도시된 필름 부착 모듈을 설명하기 위한 개략적인 구성도이다.
도 4는 도 3에 도시된 진공 플레이트와 필름 정렬부를 설명하기 위한 개략적인 확대도이다.
도 5 내지 도 10은 도 3에 도시된 필름 부착 모듈의 동작을 설명하기 위한 개략도들이다.
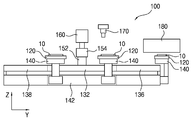
100 : 필름 부착 장치 110 : 로드 위치
120 : 패널 스테이지 130 : 무한 트랙 모듈
132 : 제1 직선 트랙 134 : 제2 직선 트랙
136 : 제1 곡선 트랙 138 : 제2 곡선 트랙
140 : 가동 블록 142 : 가이드 유닛
150 : 로터리 조인트 유닛 152 : 제1 조인트 부재
154 : 제2 조인트 부재 160 : 회전 구동부
170 : 정렬 카메라 180 : 플라즈마 유닛
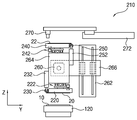
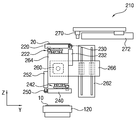
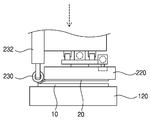
200 : 필름 부착 위치 210 : 필름 부착 모듈
220 : 진공 플레이트 222 : 필름 정렬부
224 : 수평 정렬부 226 : 각도 정렬부
230 : 가압 롤러 232 : 롤러 구동부
240 : 제2 진공 플레이트 242 : 제2 필름 정렬부
244 : 제2 수평 정렬부 246 : 제2 각도 정렬부
250 : 제2 가압 롤러 252 : 제2 롤러 구동부
260 : 회전 구동부 262 : 수직 구동부
264 : 로터리 부재 266 : 가동 플레이트
270 : 정렬 카메라 272 : 카메라 구동부
300 : 언로드 위치
Claims (24)
- 디스플레이 패널을 지지하기 위한 패널 스테이지; 및
폐루프 형태의 이송 경로를 따라 상기 패널 스테이지를 이동시키며 상기 디스플레이 패널이 상기 패널 스테이지 상에 로드되는 로드 위치와 상기 디스플레이 패널이 상기 패널 스테이지로부터 언로드되는 언로드 위치를 갖는 무한 트랙 모듈을 포함하는 것을 특징으로 하는 디스플레이 패널 이송 장치. - 제1항에 있어서, 상기 무한 트랙 모듈은,
서로 평행하게 연장하는 한 쌍의 직선 트랙들; 및
상기 직선 트랙들의 단부들을 서로 연결하는 한 쌍의 곡선 트랙들을 포함하는 것을 특징으로 하는 디스플레이 패널 이송 장치. - 제1항에 있어서, 상기 무한 트랙 모듈은,
상기 이송 경로를 따라 배치되며 상기 패널 스테이지를 안내하기 위한 가이드 유닛; 및
상기 이송 경로를 따라 상기 패널 스테이지를 이동시키기 위한 스테이지 구동부를 포함하는 것을 특징으로 하는 디스플레이 패널 이송 장치. - 제3항에 있어서, 상기 구동 유닛은 리니어 모터를 포함하는 것을 특징으로 하는 디스플레이 패널 이송 장치.
- 제1항에 있어서, 상기 패널 스테이지는 상기 디스플레이 패널이 진공 흡착되는 상부면을 갖는 것을 특징으로 하는 디스플레이 패널 이송 장치.
- 제5항에 있어서, 상기 무한 트랙 모듈의 내측에 배치되며 상기 패널 스테이지를 진공 펌프에 연결하기 위한 로터리 조인트 유닛을 더 포함하는 것을 특징으로 하는 디스플레이 패널 이송 장치.
- 제6항에 있어서, 상기 로터리 조인트 유닛은 상기 진공 펌프와 연결되는 제1 조인트 부재와 상기 패널 스테이지와 연결된 제2 조인트 부재를 포함하며,
상기 제2 조인트 부재는 회전 구동부에 의해 상기 패널 스테이지의 위치에 따라 회전 가능하도록 구성되는 것을 특징으로 하는 디스플레이 패널 이송 장치. - 제1항에 있어서, 상기 무한 트랙 모듈에 의해 이동 가능하도록 구성된 제2 패널 스테이지를 더 포함하는 것을 특징으로 하는 디스플레이 패널 이송 장치.
- 디스플레이 패널 상에 필름을 부착하기 위한 필름 부착 장치에 있어서,
상기 디스플레이 패널을 지지하기 위한 패널 스테이지;
폐루프 형태의 이송 경로를 따라 상기 패널 스테이지를 이동시키며 상기 디스플레이 패널이 상기 패널 스테이지 상에 로드되는 로드 위치와 상기 디스플레이 패널이 상기 패널 스테이지로부터 언로드되는 언로드 위치를 갖는 무한 트랙 모듈; 및
상기 패널 스테이지의 이동 방향을 기준으로 상기 언로드 위치의 상류측에 배치되며 상기 디스플레이 패널 상에 필름을 부착하기 위한 필름 부착 모듈을 포함하는 것을 특징으로 하는 필름 부착 장치. - 제9항에 있어서, 상기 로드 위치와 상기 필름 부착 모듈 사이에 배치되며 상기 디스플레이 패널의 표면 개질 및 세정을 위한 플라즈마 유닛을 더 포함하는 것을 특징으로 하는 필름 부착 장치.
- 제9항에 있어서, 상기 로드 위치와 상기 필름 부착 모듈 사이에 배치되며 상기 패널 스테이지 상에 로드된 상기 디스플레이 패널의 위치를 검출하기 위한 정렬 카메라를 더 포함하는 것을 특징으로 하는 필름 부착 장치.
- 제9항에 있어서, 상기 무한 트랙 모듈은,
상기 로드 위치를 갖는 제1 직선 트랙;
상기 제1 직선 트랙과 평행하게 연장하며 상기 언로드 위치와 상기 디스플레이 패널 상에 상기 필름이 부착되는 필름 부착 위치를 갖는 제2 직선 트랙; 및
상기 제1 및 제2 직선 트랙들의 단부들을 서로 연결하는 제1 및 제2 곡선 트랙들을 포함하는 것을 특징으로 하는 필름 부착 장치. - 제12항에 있어서, 상기 제1 직선 트랙의 상부에 배치되며 상기 패널 스테이지 상에 로드된 상기 디스플레이 패널의 위치를 검출하기 위한 정렬 카메라를 더 포함하는 것을 특징으로 하는 필름 부착 장치.
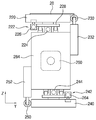
- 제9항에 있어서, 상기 필름 부착 모듈은,
상기 무한 트랙 모듈의 상부에 배치되며 상기 필름이 진공 흡착되는 흡착면을 갖는 진공 플레이트;
상기 진공 플레이트 상에 상기 필름을 로드하기 위하여 상기 흡착면이 상방으로 위치되도록 상기 진공 플레이트를 회전시키고 상기 필름을 상기 디스플레이 패널 상으로 제공하기 위하여 상기 흡착면이 하방으로 위치되도록 상기 진공 플레이트를 회전시키는 회전 구동부; 및
상기 필름을 상기 디스플레이 패널 상에 부착하기 위하여 상기 진공 플레이트를 수직 방향으로 이동시키는 수직 구동부를 포함하는 것을 특징으로 하는 필름 부착 장치. - 제14항에 있어서, 상기 필름 부착 모듈은,
상기 진공 플레이트의 상부에 배치되며 상기 진공 플레이트 상에 로드된 상기 필름의 위치를 검출하기 위한 정렬 카메라; 및
상기 진공 플레이트 상에 로드된 상기 필름의 위치를 정렬하기 위한 필름 정렬부를 더 포함하는 것을 특징으로 하는 필름 부착 장치. - 제15항에 있어서, 상기 필름 부착 모듈은 상기 회전 구동부에 의해 회전 가능하게 구성된 로터리 부재를 더 포함하며,
상기 진공 플레이트와 상기 필름 정렬부는 상기 로터리 부재의 일측 단부 상에 배치되는 것을 특징으로 하는 필름 부착 장치. - 제16항에 있어서, 상기 필름 부착 모듈은,
상기 로터리 부재의 타측 단부 상에 배치되며 제2 필름이 로드되는 제2 진공 플레이트; 및
상기 제2 진공 플레이트 상에 로드된 상기 제2 필름의 위치를 정렬하기 위한 제2 필름 정렬부를 더 포함하는 것을 특징으로 하는 필름 부착 장치. - 제15항에 있어서, 상기 필름 부착 모듈은 상기 정렬 카메라를 수평 방향으로 이동시키기 위한 카메라 구동부를 더 포함하는 것을 특징으로 하는 필름 부착 장치.
- 제15항에 있어서, 상기 필름 정렬부는,
상기 필름의 수평 정렬을 위해 상기 진공 플레이트를 수평 방향으로 이동시키는 수평 정렬부; 및
상기 필름의 각도 정렬을 위해 상기 진공 플레이트를 회전시키는 각도 정렬부를 포함하는 것을 특징으로 하는 필름 부착 장치. - 제15항에 있어서, 상기 필름 정렬부는 UVW 스테이지를 포함하는 것을 특징으로 하는 필름 부착 장치.
- 제14항에 있어서, 상기 필름은 일측 단부가 상기 진공 플레이트로부터 돌출되도록 로드되며,
상기 진공 플레이트의 일측에는 상기 필름의 일측 단부를 상기 디스플레이 패널의 일측 단부 상에 밀착시키기 위한 가압 롤러가 배치되는 것을 특징으로 하는 필름 부착 장치. - 제21항에 있어서, 상기 필름의 일측 단부가 상기 디스플레이 패널의 일측 단부 상에 밀착된 후 상기 무한 트랙 모듈은 상기 필름이 상기 디스플레이 패널 상에 부착되도록 상기 패널 스테이지를 이동시키는 것을 특징으로 하는 필름 부착 장치.
- 제21항에 있어서, 상기 수직 구동부는 상기 필름과 상기 디스플레이 패널 사이의 간격이 기 설정된 간격이 되도록 상기 진공 플레이트를 하강시키는 것을 특징으로 하는 필름 부착 장치.
- 제21항에 있어서, 상기 회전 구동부는 상기 디스플레이 패널의 일측 단부 상에 위치된 상기 필름의 일측 단부가 상기 필름의 타측 단부보다 낮게 위치되도록 상기 진공 플레이트를 회전시키는 것을 특징으로 하는 필름 부착 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180048680A KR20190124558A (ko) | 2018-04-26 | 2018-04-26 | 무한 트랙 모듈 및 이를 갖는 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180048680A KR20190124558A (ko) | 2018-04-26 | 2018-04-26 | 무한 트랙 모듈 및 이를 갖는 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20190124558A true KR20190124558A (ko) | 2019-11-05 |
Family
ID=68577169
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180048680A Ceased KR20190124558A (ko) | 2018-04-26 | 2018-04-26 | 무한 트랙 모듈 및 이를 갖는 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20190124558A (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220142272A (ko) * | 2021-04-14 | 2022-10-21 | 주식회사 야스 | 로봇 주행 트랙을 구비한 증착시스템 |
| KR102472653B1 (ko) * | 2021-11-16 | 2022-11-29 | (주)엠디디 | 자체 진공흡착이 가능한 이송장치 및 이를 구비하는 엔드리스 시스템 |
| CN116344423A (zh) * | 2023-05-29 | 2023-06-27 | 上海新创达半导体设备技术有限公司 | 基于无线供电的物料搬运天车及其控制方法 |
| CN119451283A (zh) * | 2025-01-08 | 2025-02-14 | 金阳(泉州)新能源科技有限公司 | 一种环形多工位整形扩距贴膜装置以及太阳能电池生产线 |
| CN119480761A (zh) * | 2025-01-08 | 2025-02-18 | 金阳(泉州)新能源科技有限公司 | 一种环形多工位覆膜裂断装置以及柔性太阳能电池生产线 |
-
2018
- 2018-04-26 KR KR1020180048680A patent/KR20190124558A/ko not_active Ceased
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220142272A (ko) * | 2021-04-14 | 2022-10-21 | 주식회사 야스 | 로봇 주행 트랙을 구비한 증착시스템 |
| KR102472653B1 (ko) * | 2021-11-16 | 2022-11-29 | (주)엠디디 | 자체 진공흡착이 가능한 이송장치 및 이를 구비하는 엔드리스 시스템 |
| CN116344423A (zh) * | 2023-05-29 | 2023-06-27 | 上海新创达半导体设备技术有限公司 | 基于无线供电的物料搬运天车及其控制方法 |
| CN116344423B (zh) * | 2023-05-29 | 2023-08-11 | 上海新创达半导体设备技术有限公司 | 基于无线供电的物料搬运天车及其控制方法 |
| CN119451283A (zh) * | 2025-01-08 | 2025-02-14 | 金阳(泉州)新能源科技有限公司 | 一种环形多工位整形扩距贴膜装置以及太阳能电池生产线 |
| CN119480761A (zh) * | 2025-01-08 | 2025-02-18 | 金阳(泉州)新能源科技有限公司 | 一种环形多工位覆膜裂断装置以及柔性太阳能电池生产线 |
| CN119480761B (zh) * | 2025-01-08 | 2025-03-21 | 金阳(泉州)新能源科技有限公司 | 一种环形多工位覆膜裂断装置以及柔性太阳能电池生产线 |
| CN119451283B (zh) * | 2025-01-08 | 2025-03-25 | 金阳(泉州)新能源科技有限公司 | 一种环形多工位整形扩距贴膜装置以及太阳能电池生产线 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102285975B1 (ko) | 얼라이너 구조 및 얼라인 방법 | |
| KR20190124558A (ko) | 무한 트랙 모듈 및 이를 갖는 장치 | |
| TWI297406B (ko) | ||
| KR101400676B1 (ko) | 필름 부착 장치 및 이를 이용한 필름 부착 방법 | |
| KR20040099319A (ko) | 기판 반송 장치 | |
| JP2009147240A (ja) | 基板支持装置、基板支持方法、基板加工装置、基板加工方法、表示装置構成部材の製造方法 | |
| CN102169253B (zh) | 液晶基板粘合系统 | |
| KR101394312B1 (ko) | 웨이퍼 정렬장치 | |
| KR20110077681A (ko) | 진공흡착 컨베이어 벨트를 이용한 박막 이송 검사장치 및 이송 검사방법 | |
| KR101440310B1 (ko) | 패널의 자동 압흔 검사장치 | |
| KR100884585B1 (ko) | 기판 이송 시스템 | |
| JP5512349B2 (ja) | 基板反転装置及び基板反転方法 | |
| KR20190121556A (ko) | 디스플레이 패널 상에 필름을 부착하기 위한 장치 | |
| KR20200034534A (ko) | 흡착장치, 성막장치, 흡착방법, 성막방법 및 전자 디바이스의 제조방법 | |
| KR101031105B1 (ko) | 소형 디스플레이 패널 세정장치 | |
| KR102501609B1 (ko) | 성막 장치, 이를 사용한 성막 방법, 및 전자 디바이스의 제조방법 | |
| KR101528607B1 (ko) | 디스플레이 패널 이송장치 | |
| CN116497335B (zh) | 搬送装置及成膜装置 | |
| JP6208000B2 (ja) | パターン形成装置およびパターン形成方法 | |
| KR102386336B1 (ko) | 기판 검사 장치 | |
| KR101789451B1 (ko) | 부착 장치 | |
| JP2011123146A (ja) | 偏光板貼付け装置及び該装置を用いた偏光板貼付け方法 | |
| KR101436899B1 (ko) | 글라스 정렬공급장치 | |
| KR100490380B1 (ko) | 라미네이팅 장치 | |
| JP3261892B2 (ja) | Tab搭載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T13-X000 | Administrative time limit extension granted |
St.27 status event code: U-3-3-T10-T13-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |