KR20190125580A - 역기전력 위상 편이 오차 보상기를 구비한 일정 대역 히스테리시스 전류 컨트롤러를 갖는 bldc 모터 구동장치 - Google Patents
역기전력 위상 편이 오차 보상기를 구비한 일정 대역 히스테리시스 전류 컨트롤러를 갖는 bldc 모터 구동장치 Download PDFInfo
- Publication number
- KR20190125580A KR20190125580A KR1020180049552A KR20180049552A KR20190125580A KR 20190125580 A KR20190125580 A KR 20190125580A KR 1020180049552 A KR1020180049552 A KR 1020180049552A KR 20180049552 A KR20180049552 A KR 20180049552A KR 20190125580 A KR20190125580 A KR 20190125580A
- Authority
- KR
- South Korea
- Prior art keywords
- error
- phase
- current
- torque
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/10—Arrangements for controlling torque ripple, e.g. providing reduced torque ripple
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/08—Arrangements for controlling the speed or torque of a single motor
- H02P6/085—Arrangements for controlling the speed or torque of a single motor in a bridge configuration
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/28—Arrangements for controlling current
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
Description












도 2는 역기전력과 상 전류 사이의 오정렬을 보여주는 타이밍도이다.
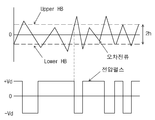
도 3은 본 발명에 따른 오차 전류에 따른 히스테리시스 대역 및 펄스를 보여주는 타이밍도이다.
도 4는 본 발명에 따라 역기전력(back EMF) 위상 편이 오차 보상기를 구비한 일정 대역 히스테리시스 전류 컨트롤러를 갖춘 BLDC 모터 구동장치를 보여주는 블록도이다.
도 5는 정류 상 오차 소스가 없는 역기전력과 상 전류 사이의 관계를 나타내는 타이밍도이다.
도 6은 정류 상 오차 소스를 이용한 역기전력과 상 전류 사이의 관계를 나타내는 타이밍도이다.
도 7은 위상 편이량과 토크 리플 사이의 관계를 나타내는 타이밍도이다.
도 8은 제로-크로싱 위치가 일찍 감지될 때의 토크 리플을 보여주는 타이밍도이다.
도 9는 제로-크로싱 위치가 늦게 감지될 때의 토크 리플을 보여주는 타이밍도이다.
도 10은 제로-크로싱 위치가 일찍 검출되고 적분기에 의해 오차가 모니터 될 때의 부하 토크와 실제 토크 사이의 차이를 보여주는 타이밍도이다.
도 11은 제로-크로싱 위치가 늦게 검출되고 적분기에 의해 오차가 모니터 될 때 하중과 실제 토크 사이의 차이를 보여주는 타이밍도이다.
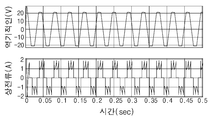
도 12는 15도 전기각의 위상 편이 조건인 경우 일정 대역 히스테리시스 전류 컨트롤러에서 발생한 토크를 보여주는 타이밍도이다.
도 13은 15도 전기각의 위상 편이 조건에서 역기전력 위상 편이 오차 보상기로 일정 대역 히스테리시스 전류 컨트롤러에서 발생한 토크를 보여주는 타이밍도이다.
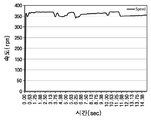
도 14는 동력계에서 BLDC 모터의 측정 속도를 보여주는 타이밍도이다.
도 15는 단지 부정확한 제로-크로싱 검출인 경우 일정 대역 히스테리시스 전류 컨트롤러에서 발생한 토크를 보여주는 타이밍도이다.
도 16은 부정확한 제로-크로싱 검출인 경우 역기전력 위상 편이 오차 보상기를 갖춘 일정 대역 히스테리시스 전류 컨트롤러에서 발생한 토크를 보여주는 타이밍도이다.













| 파라미터 | 설정값 |
| 고정자 저항(Ω) | 0.0485 |
| 고정자 위상 인덕턴스(H) | 0.0085 |
| 자속 쇄교수(V.s) | 0.1194 |
| 관성(J) | 0.0027 |
| 폴 쌍의 수 | 4 |
| 파라미터 | 값 |
| 최대 속도(rpm) | 12000 |
| 냉각 모드 | 송풍기 |
| 운동 동력 자연 대류(5 분)(W) | 2000 |
| 송풍기가 있는 동력(5 분)(W) | 3500 |
| 운동 동력 자연 대류(연속) (W) | 700 |
| 송풍기가 있는 동력(연속) (W) | 3000 |
| 최대 부하 토크(N.m) | 13.4 |
| 정격 전류에서 최소 토크(Kg·cm) | 140 |
| 데이터 업데이트 속도(Hz) | 5 |
| 정확도 정격 | ±1% |
13: 역기전력 위상 편이 보상기 14: 적분기
15: 오차 발생기 16: 부하 토크 생성기
17: 각속도/속도 변환기 18: 기준 속도 생성기
19: 역기전력 발생기 20: 기계각/전기각 변환기
21: 토크 계산기 22: 스플리터
23,28: MUX 24: 모드 선택 스위치
25a,25b: 스플리터 26,27: 합산기
29: BLDC 모터 상태 공간 모델 30: BLDC 모터
Claims (5)
- 3상 BL(Brushless) DC 모터의 3상 전류, 기계 각속도 및 모터 회전자의 회전위치를 알 수 있는 회전 각속도에 기초하여 3상 BLDC 모터를 구동하는 BLDC 모터 구동장치로서,
상기 기계 각속도를 전기각으로 변환하여 출력하는 기계각/전기각 변환기;
상기 회전 각속도를 속도로 변환하여 모터의 출력 속도를 출력하는 각속도/속도 변환기;
상기 모터의 실제 출력 속도를 기준 속도 생성기에서 생성된 기준 속도와 비교하여 기준 상 전류를 발생하는 기준 상 전류 생성기; 및
일정한 히스테리시스 대역(hysteresis band)을 갖는 일정 대역 비교기를 사용하여 상기 피드백되는 3상 전류를 기준 상 전류와 비교하여 전류 오차를 발생하고, 상기 전류 오차를 상위 및 하위 히스테리시스 대역과 비교하여 PWM(펄스폭변조) 출력 전압의 펄스폭을 제어하는 일정 대역 히스테리시스 전류 제어기;를 포함하는 BLDC 모터 구동장치. - 제1항에 있어서,
상기 기준 상 전류 생성기는 실제 출력 속도가 기준 속도보다 작으면 기준 상 전류를 증가시키고, 실제 출력 속도가 기준 속도보다 더 크면 기준 상 전류를 감소시키는 BLDC 모터 구동장치. - 제1항에 있어서,
상기 3상 전류(phase current)(iA,iB,iC)와 3상 자속값으로부터 출력 토크(Te)를 계산하여 출력하는 토크 계산기;
상기 부하 토크 발생기로부터 수신한 사용자가 설정한 원하는 부하 토크(load torque)(TL)와 토크 계산기로부터 수신한 실제 모터의 출력 토크(Te)를 비교하여 오차값을 출력하는 오차 발생기;
상기 오차 발생기로부터 오차값을 받아서 미리 설정된 샘플링 주기별로 적분된 값을 생성하는 적분기; 및
상기 적분기에서 누적된 오차값이 음의 값인 경우 출력을 증가시키고, 오차값이 양의 값인 경우 출력을 감소시키는 방법으로 역기전력 위상 편이를 보상하는 역기전력 위상 편이 보상기;를 더 포함하며,
상기 오차 발생기는 출력 토크가 부하 토크보다 더 크면 역기전력 제로-크로싱 감지시에 상이 빠른 것으로 판단하여, 속도를 감소시키도록 오차값이 (-)값을 갖도록 하고,
상기 출력 토크가 부하 토크보다 더 작으면 상기와 반대로 역기전력 제로-크로싱 감지시에 상이 느린 것으로 판단하여, 속도를 증가시키도록 오차값이 (+)값을 갖도록 설정하는 BLDC 모터 구동장치. - 제1항에 있어서,
상기 일정 대역 히스테리시스 전류 제어기는 일정한 히스테리시스 대역(hysteresis band)을 갖는 일정 대역 비교기를 사용하여 피드백 상 전류를 기준 상 전류와 비교하는 전류 오차를 발생하는 BLDC 모터 구동장치. - 제4항에 있어서,
상기 전류 오차(error)가 상위 히스테리시스 대역(Upper HB)을 초과하면, PWM 출력 전압의 펄스폭을 감소시키고,
상기 전류 오차가 하위 히스테리시스 대역(Lower HB) 아래로 내려가는 경우, PWM 출력 전압의 펄스폭을 증가시키는 BLDC 모터 구동장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180049552A KR102166365B1 (ko) | 2018-04-30 | 2018-04-30 | 역기전력 위상 편이 오차 보상기를 구비한 일정 대역 히스테리시스 전류 제어기를 갖는 bldc 모터 구동장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180049552A KR102166365B1 (ko) | 2018-04-30 | 2018-04-30 | 역기전력 위상 편이 오차 보상기를 구비한 일정 대역 히스테리시스 전류 제어기를 갖는 bldc 모터 구동장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190125580A true KR20190125580A (ko) | 2019-11-07 |
| KR102166365B1 KR102166365B1 (ko) | 2020-10-15 |
Family
ID=68579020
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180049552A Active KR102166365B1 (ko) | 2018-04-30 | 2018-04-30 | 역기전력 위상 편이 오차 보상기를 구비한 일정 대역 히스테리시스 전류 제어기를 갖는 bldc 모터 구동장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102166365B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114123874A (zh) * | 2021-11-10 | 2022-03-01 | 中国兵器工业集团航空弹药研究院有限公司 | 一种基于关断相电流控制的换相转矩脉动抑制方法、存储介质及设备 |
| CN114900096A (zh) * | 2022-05-13 | 2022-08-12 | 杭州颐达软件科技有限公司 | 一种用于电力闭环加载控制的补偿系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080053992A (ko) * | 2006-12-12 | 2008-06-17 | 현대자동차주식회사 | 인버터 전압 제어방식의 모터 제어 시스템 |
| KR101343312B1 (ko) | 2012-09-20 | 2013-12-18 | (주)위더스비젼 | 3상 센서리스 bldc 모터 및 그 구동제어시스템 |
| KR20160082637A (ko) * | 2014-12-26 | 2016-07-08 | 주식회사 케이씨씨 | 2액형 도료 조성물 및 그 제조방법 |
-
2018
- 2018-04-30 KR KR1020180049552A patent/KR102166365B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080053992A (ko) * | 2006-12-12 | 2008-06-17 | 현대자동차주식회사 | 인버터 전압 제어방식의 모터 제어 시스템 |
| KR101343312B1 (ko) | 2012-09-20 | 2013-12-18 | (주)위더스비젼 | 3상 센서리스 bldc 모터 및 그 구동제어시스템 |
| KR20160082637A (ko) * | 2014-12-26 | 2016-07-08 | 주식회사 케이씨씨 | 2액형 도료 조성물 및 그 제조방법 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114123874A (zh) * | 2021-11-10 | 2022-03-01 | 中国兵器工业集团航空弹药研究院有限公司 | 一种基于关断相电流控制的换相转矩脉动抑制方法、存储介质及设备 |
| CN114900096A (zh) * | 2022-05-13 | 2022-08-12 | 杭州颐达软件科技有限公司 | 一种用于电力闭环加载控制的补偿系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102166365B1 (ko) | 2020-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Bateman et al. | Sensorless operation of an ultra-high-speed switched reluctance machine | |
| JP3972124B2 (ja) | 同期電動機の速度制御装置 | |
| KR100791814B1 (ko) | 센서리스 비엘디씨 전동기의 제어방법 | |
| US20070296371A1 (en) | Position sensorless control apparatus for synchronous motor | |
| JP2009044935A (ja) | モータ制御装置及び圧縮機 | |
| JP2006054995A (ja) | 交流電動機の駆動制御装置および駆動制御方法 | |
| JP2021106490A (ja) | スイッチト・リラクタンス・モータ駆動の準センサレス適応制御のための方法及び装置 | |
| JP2010063208A (ja) | 同期電動機の駆動システム、及びこれに用いる制御装置 | |
| Xie et al. | Permanent magnet flux online estimation based on zero-voltage vector injection method | |
| CN104521131B (zh) | 同步电动机驱动系统 | |
| WO2016161213A1 (en) | Fractional delay adjustment in a field-oriented control architecture | |
| Kan et al. | Adaptive soft starting method with current limit strategy for sensorless BLDC motors | |
| KR102166365B1 (ko) | 역기전력 위상 편이 오차 보상기를 구비한 일정 대역 히스테리시스 전류 제어기를 갖는 bldc 모터 구동장치 | |
| JP4051833B2 (ja) | 永久磁石式同期電動機のベクトル制御装置 | |
| JP6293401B2 (ja) | 空気調和機のモータ制御装置及び空気調和機 | |
| TW201710924A (zh) | 以多項式估測感應機參數之方法 | |
| Petrus et al. | Direct instantaneous torque control of SRMs versus current profiling—Comparison regarding torque ripple and copper losses | |
| JP3767896B2 (ja) | ステッピングモータの駆動装置 | |
| JP2010035351A (ja) | 同期電動機のロータ位置推定装置 | |
| JP7108834B2 (ja) | 動力発生装置 | |
| US7405534B2 (en) | Apparatus and method for controlling velocity of motor | |
| Sanita et al. | Modelling and simulation of four quadrant operation of three phase brushless DC motor with hysteresis current controller | |
| KR20220061566A (ko) | 전동기 제어장치 | |
| Tang et al. | Assessments of dead beat current control for high speed permanent magnet synchronous motor drives | |
| JP2017205017A (ja) | 空気調和機のモータ制御装置及び空気調和機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180430 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200107 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20200709 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20201008 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20201008 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20230921 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |