KR20190134720A - 무인 공중 운반체로부터 송신되는 라디오 프레임에서의 지오로케이션 정보의 브로드캐스팅 - Google Patents
무인 공중 운반체로부터 송신되는 라디오 프레임에서의 지오로케이션 정보의 브로드캐스팅 Download PDFInfo
- Publication number
- KR20190134720A KR20190134720A KR1020197032304A KR20197032304A KR20190134720A KR 20190134720 A KR20190134720 A KR 20190134720A KR 1020197032304 A KR1020197032304 A KR 1020197032304A KR 20197032304 A KR20197032304 A KR 20197032304A KR 20190134720 A KR20190134720 A KR 20190134720A
- Authority
- KR
- South Korea
- Prior art keywords
- uav
- information
- radio
- geolocation
- radio frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004891 communication Methods 0.000 claims description 91
- 238000000034 method Methods 0.000 claims description 73
- 230000005540 biological transmission Effects 0.000 claims description 34
- 238000004590 computer program Methods 0.000 claims description 10
- 230000033001 locomotion Effects 0.000 claims description 5
- 238000012545 processing Methods 0.000 claims description 5
- 230000007774 longterm Effects 0.000 claims description 3
- 239000000523 sample Substances 0.000 claims description 3
- 230000008569 process Effects 0.000 description 7
- 239000000969 carrier Substances 0.000 description 6
- 230000008901 benefit Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 101000800488 Homo sapiens T-cell leukemia homeobox protein 1 Proteins 0.000 description 1
- 102100033111 T-cell leukemia homeobox protein 1 Human genes 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- QVFWZNCVPCJQOP-UHFFFAOYSA-N chloralodol Chemical compound CC(O)(C)CC(C)OC(O)C(Cl)(Cl)Cl QVFWZNCVPCJQOP-UHFFFAOYSA-N 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000004880 explosion Methods 0.000 description 1
- 230000010006 flight Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/023—Services making use of location information using mutual or relative location information between multiple location based services [LBS] targets or of distance thresholds
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- G08G5/0008—
-
- G08G5/0013—
-
- G08G5/0069—
-
- G08G5/045—
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/20—Arrangements for acquiring, generating, sharing or displaying traffic information
- G08G5/25—Transmission of traffic-related information between aircraft
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/20—Arrangements for acquiring, generating, sharing or displaying traffic information
- G08G5/26—Transmission of traffic-related information between aircraft and ground stations
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/50—Navigation or guidance aids
- G08G5/55—Navigation or guidance aids for a single aircraft
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/50—Navigation or guidance aids
- G08G5/57—Navigation or guidance aids for unmanned aircraft
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft
- G08G5/80—Anti-collision systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04H—BROADCAST COMMUNICATION
- H04H20/00—Arrangements for broadcast or for distribution combined with broadcast
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/025—Services making use of location information using location based information parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/025—Services making use of location information using location based information parameters
- H04W4/027—Services making use of location information using location based information parameters using movement velocity, acceleration information
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/06—Selective distribution of broadcast services, e.g. multimedia broadcast multicast service [MBMS]; Services to user groups; One-way selective calling services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/42—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for mass transport vehicles, e.g. buses, trains or aircraft
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/46—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for vehicle-to-vehicle communication [V2V]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W72/00—Local resource management
- H04W72/30—Resource management for broadcast services
-
- B64C2201/122—
-
- B64C2201/14—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/20—UAVs specially adapted for particular uses or applications for use as communications relays, e.g. high-altitude platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/20—Remote controls
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
- H04W84/02—Hierarchically pre-organised networks, e.g. paging networks, cellular networks, WLAN [Wireless Local Area Network] or WLL [Wireless Local Loop]
- H04W84/04—Large scale networks; Deep hierarchical networks
- H04W84/06—Airborne or Satellite Networks
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
- Y02D30/70—Reducing energy consumption in communication networks in wireless communication networks
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Multimedia (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Mobile Radio Communication Systems (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Traffic Control Systems (AREA)
- Radio Relay Systems (AREA)
Abstract
Description
도 1은 일 실시예에 따른, 에어 트래픽 시스템, 무선 통신 네트워크 및 그 시스템 및 네트워크 내에서 동작하는 무인 공중 운반체(UAV)를 예시한다.
도 2는 일 실시예에 따른, UAV에 의해 현재 지오로케이션 정보를 결정하기 위한 예시적인 기법을 예시한다.
도 3은 일 실시예에 따른, 브로드캐스팅을 위해 라디오 프레임 내에 준비되는 UAV에 대한 예시적인 지오로케이션 정보를 예시한다.
도 4는 일 실시예에 따른, 브로드캐스팅을 위해 라디오 프레임 내에 준비되는 웨이포인트(waypoint)들에 대한 예시적인 지오로케이션 정보를 예시한다.
도 5는 일 실시예에 따른, 브로드캐스팅을 위해 라디오 프레임 내에 준비되는 예시적인 배터리 상태 정보를 예시한다.
도 6은 일 실시예에 따른, 브로드캐스팅을 위해 라디오 프레임 내에 준비되는 예시적인 상태 정보를 예시한다.
도 7은 일 실시예에 따른, 브로드캐스팅을 위해 라디오 프레임 내에 준비되는 예시적인 경보들 및 경고들 정보를 예시한다.
도 8은 일 실시예에 따른, 브로드캐스팅을 위해 라디오 프레임 내에 준비되는 UAV에 대한 예시적인 동작 모드 정보를 예시한다.
도 9는 일 실시예에 따른, 브로드캐스팅을 위해 라디오 프레임 내에 준비되는 UAV에 대한 예시적인 임의적 정보를 예시한다.
도 10은 일 실시예에 따른, UAV로부터의 브로드캐스팅을 위한 정보를 준비하는 방법을 예시한다.
도 11은 일 실시예에 따른, 충돌 회피에 대해 평가하기 위해 다른 UAV로부터의 수신된 지오로케이션 정보 브로드캐스트를 사용하는 방법을 예시한다.
도 12는 일 실시예에 따른, 브로드캐스팅된 지오로케이션 정보의 사용에 의한 충돌 회피를 예시한다.
도 13은 일 실시예에 따른 UAV의 컴포넌트들을 예시한다.
도 14는 일 실시예에 따른, 네트워크 노드에서 UAV로부터 업링크 프레임에서 수신되는 지오로케이션 정보를 재브로드캐스팅하고 지오로케이션 정보를 다운링크 프레임에서 송신하는 방법을 예시한다.
도 15는 일 실시예에 따른, 네트워크 노드에 대한 컴포넌트들을 예시한다.
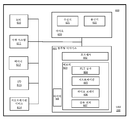
도 16은 일 실시예에 따른, 가상 네트워크 요소들을 갖는 네트워크 노드에 대한 컴포넌트들의 대안적인 구현을 예시한다.
Claims (32)
- 무인 공중 운반체(Unmanned Aerial Vehicle, UAV)(150)가 상기 UAV의 지오로케이션 정보(geolocation information)를 브로드캐스팅하는 방법(400)으로서,
상기 UAV에 의해, 지오로케이션 서비스(152)와 통신하고 상기 지오로케이션 서비스를 이용하여 상기 UAV를 지오로케이팅하는 것에 의해 상기 UAV의 현재 지오로케이션을 결정하는 단계(401);
상기 UAV에 의해, 상기 UAV의 상기 현재 지오로케이션을 식별하는 지오로케이션 정보를 포함하는 라디오 프레임을 준비하는 단계(402) - 상기 준비된 라디오 프레임은 3세대 파트너십 프로젝트(3rd Generation Partnership Project)(3GPP) 라디오 프로토콜, WiFi 라디오 프로토콜, 무선 개인 영역 네트워크 프로토콜 및 저전력 광역 네트워크 프로토콜 중 하나의 라디오 프로토콜에 대한 것임 -;
상기 UAV에 의해, 상기 라디오 프레임에의 포함을 위해 상기 UAV와 연관된 다른 정보를 준비하는 단계(403);
상기 UAV에 의해, 상기 UAV의 상기 현재 지오로케이션을 브로드캐스팅하기 위해 상기 다른 정보 및 상기 지오로케이션 정보를 포함하는 상기 라디오 프레임을 송신하는 단계(410)
를 포함하는, 방법(400). - 제1항에 있어서,
상기 라디오 프레임을 송신하는 단계는, 제어 프레임에서 상기 라디오 프레임을 송신하는 단계를 포함하는, 방법(400). - 제1항에 있어서,
상기 라디오 프레임을 송신하는 단계는, 헤더, 비콘(beacon) 또는 프로브(probe)에서 상기 라디오 프레임을 송신하는 단계를 포함하는, 방법(400). - 제1항에 있어서,
상기 라디오 프레임을 송신하는 단계는, 기지국(141) 또는 액세스 포인트(141)와 통신하는 제어 채널에서 상기 라디오 프레임을 송신하는 단계를 포함하는, 방법(400). - 제4항에 있어서,
상기 라디오 프레임을 송신하는 단계는, 패킷 브로드캐스트 제어 채널(Packet Broadcast Control Channel)(PBCCH)에서 상기 라디오 프레임을 상기 기지국(141)에 송신하는 단계를 포함하는, 방법(400). - 제1항에 있어서,
상기 라디오 프레임을 송신하는 단계는, 사이드링크 브로드캐스트를 통해 다른 UAV들에 대한 직접 피어-투-피어 통신(direct peer-to-peer communication)으로 상기 라디오 프레임을 브로드캐스팅하는 단계를 포함하는, 방법(400). - 제6항에 있어서,
상기 라디오 프레임을 송신하는 단계는, 물리 사이드링크 브로드캐스트 채널(Physical Sidelink Broadcast Channel)(PSBCH)에서 상기 라디오 프레임을 상기 다른 UAV들 중 하나 이상에게 송신하는 단계를 포함하는, 방법(400). - 제1항 내지 제7항 중 어느 한 항에 있어서,
상기 라디오 프레임을 준비하는 단계는, 상기 UAV의 상기 현재 지오로케이션에 관한 위도, 경도, 고도 및 속도 정보(300)를 제공하는 단계를 더 포함하는, 방법(400). - 제8항에 있어서,
상기 라디오 프레임을 준비하는 단계는, 상기 현재 지오로케이션에서 상기 UAV의 이동 방향에 관한 방향 정보(300)를 제공하는 단계를 더 포함하는, 방법(400). - 제1항 내지 제9항 중 어느 한 항에 있어서,
상기 라디오 프레임을 준비하는 단계는,
상기 UAV 상의 배터리의 스테이터스(status);
상기 UAV에 의한 횡단을 위해 의도된 웨이포인트(waypoint)들;
상기 UAV의 아이덴티티(identity);
상기 UAV의 타입;
상기 UAV의 길이;
상기 UAV의 운반체 타입;
상기 UAV의 능력들;
상기 UAV의 운반체 벤더(vehicle vendor);
상기 UAV에 의해 이용되는 펌웨어;
상기 UAV에 의해 이용되는 소프트웨어;
상기 UAV로부터의 경고들 또는 경보들; 및
상기 UAV의 동작 모드
중 하나 이상에 관한 정보를 제공하는 단계를 더 포함하는, 방법(400). - 제1항에 있어서,
제2 UAV(151)로부터 지오로케이션 정보 브로드캐스트를 수신하는 단계(501); 및
상기 제2 UAV와의 충돌을 회피하기 위해 상기 제2 UAV의 상기 수신된 지오로케이션 정보를 이용하는 단계(502, 503, 504, 505)
를 더 포함하는, 방법(400). - 제11항에 있어서,
상기 제2 UAV(151)로부터 지오로케이션 정보 브로드캐스트를 수신하는 단계는 기지국(141) 또는 액세스 포인트(141)를 통한 것인, 방법(400). - 제11항에 있어서,
상기 제2 UAV(151)로부터 지오로케이션 정보 브로드캐스트를 수신하는 단계는 상기 제2 UAV와의 직접 피어-투-피어 사이드링크 통신을 통한 것인, 방법(400). - 제11항 내지 제13항 중 어느 한 항에 있어서,
상기 제2 UAV(151)로부터의 오래된 지오로케이션 정보 브로드캐스트를 식별하기 위해 타이머(608)를 이용하는 단계를 더 포함하는, 방법(400). - 제1항에 있어서,
다른 엔티티(entity)로부터의 송신을 수신하는 단계; 및
상기 다른 엔티티로부터 수신된 상기 송신에 포함된 정보를 상기 라디오 프레임의 다른 정보 부분에 포함시키는 것에 의해 상기 다른 엔티티로부터 수신된 상기 송신에 포함된 정보를 재송신하는 단계
를 더 포함하는, 방법(400). - 제1항에 있어서,
다른 엔티티로부터의 송신을 수신하는 단계; 및
상기 다른 엔티티로부터 수신된 상기 송신에 포함된 정보를 상기 라디오 프레임의 다른 정보 부분에 포함시키는 것에 의해 상기 다른 엔티티로부터 수신된 상기 송신에 포함된 정보를 재송신하는 단계
를 더 포함하고,
상기 재송신은, 다른 관계자로부터의 송신을 수신하는 데 사용되는 프로토콜과는 상이한 통신 프로토콜을 이용하고 있는, 방법(400). - 제1항 내지 제16항 중 어느 한 항에 있어서,
상기 라디오 프레임을 송신하는 단계는,
3세대(3G) 라디오 통신;
4세대(4G) 라디오 통신;
4G 롱 텀 에볼루션(Long Term Evolution)(LTE);
5세대(5G) 라디오 통신;
5G 뉴 라디오(New Radio)(NR 또는 NX) 라디오 통신;
802.11 라디오 통신;
802.15.4 라디오 통신;
무선 개인 영역 네트워크 라디오 통신;
사물 인터넷(Internet of Things)(IoT) 라디오 통신; 및
저전력 광역 네트워크 라디오 통신
에 기초하는 하나 이상의 통신 프로토콜을 사용하여 상기 라디오 프레임을 송신하는 단계를 포함하는, 방법(400). - 무인 공중 운반체(UAV)(150) 상의 사용을 위한 장치(600)로서,
라디오 통신을 송신 및 수신하기 위한 라디오 트랜시버(620);
프로세서(602); 및
상기 프로세서에 커플링되는 메모리(603)
를 포함하고,
상기 메모리는 명령어들(604, 605, 606, 607)을 포함하고, 상기 명령어들은, 상기 명령어들이 상기 프로세서에 의해 실행될 때, 상기 장치로 하여금, 제1항 내지 제17항 중 어느 한 항에 기재된 방법을 수행하게 하는, 장치(600). - 무인 공중 운반체(UAV)(150)의 프로세서(602)에 의해 실행될 때, 상기 UAV로 하여금, 제1항 내지 제17항 중 어느 한 항에 기재된 방법을 수행하게 하는 명령어들을 저장하는, 컴퓨터 판독가능 저장 매체(603).
- 무선 통신 네트워크의 네트워크 노드에서 수신되는 무인 공중 운반체(UAV)(150)의 지오로케이션 정보를 재브로드캐스팅하는 방법(700)으로서,
상기 UAV로부터의 업링크 송신에서 전송되는 라디오 프레임에서 지오로케이션 정보 및 상기 UAV와 연관된 다른 정보를 수신하는 단계(701) - 상기 지오로케이션 정보는, 상기 UAV의 현재 지오로케이션을 식별하는 정보를 포함하고, 상기 라디오 프레임은 3세대 파트너십 프로젝트(3GPP) 라디오 프로토콜, WiFi 라디오 프로토콜, 무선 개인 영역 네트워크 프로토콜 및 저전력 광역 네트워크 프로토콜 중 하나의 라디오 프로토콜을 사용하여 전송됨 -;
하나 이상의 다른 UAV들로의 브로드캐스트를 위해 상기 수신된 라디오 프레임을 프로세싱하는 단계(702); 및
상기 하나 이상의 다른 UAV들로의 다운링크 송신에서의 재브로드캐스트로서 상기 UAV의 상기 현재 지오로케이션을 식별하는 정보를 송신하는 단계(703)
를 포함하는, 방법(700). - 제20항에 있어서,
상기 다운링크 송신을 송신하는 것은, 상기 UAV와 연관된 다른 정보를 송신하는 것을 포함하는, 방법(700). - 제20항 또는 제21항에 있어서,
상기 네트워크 노드는 기지국(141) 또는 액세스 포인트(141)인, 방법(700). - 제22항에 있어서,
상기 네트워크 노드는 상기 수신된 업링크 송신의 프로세싱을 수행하기 위해 클라우드 기능성을 채용하는, 방법(700). - 제20항에 있어서,
상기 UAV로부터의 상기 라디오 프레임은 상기 UAV의 상기 현재 지오로케이션에 관한 위도, 경도, 고도 및 속도 정보를 제공하고, 상기 위도, 경도, 고도 및 속도 정보(300)는 상기 재브로드캐스트에서 송신되는, 방법(700). - 제24항에 있어서,
상기 라디오 프레임은 상기 UAV의 이동 방향에 관한 방향 정보(300)를 또한 포함하고, 상기 이동 방향은 상기 재브로드캐스트에서 송신되는, 방법(700). - 제20항 내지 제23항 중 어느 한 항에 있어서,
상기 재브로드캐스트를 송신하는 것은, 상기 UAV로부터의 상기 업링크 송신을 수신하는 데 사용되는 프로토콜과는 상이한 다운링크 송신을 위한 통신 프로토콜을 이용하는, 방법(700). - 제20항 내지 제23항 중 어느 한 항에 있어서,
상기 다운링크 송신은, 상기 UAV와 연관되는, 상기 네트워크에 의해 상기 다운링크 송신에 삽입되는 부가적인 정보를 포함하는, 방법(700). - 제20항 내지 제23항 중 어느 한 항에 있어서,
상기 다운링크 송신을 송신하는 것은, 상기 UAV와 연관된 다른 정보, 및 상기 네트워크에 의해 삽입되는 부가적인 정보를 송신하는 것을 포함하는, 방법(700). - 무인 공중 운반체(UAV)(150)의 지오로케이션 정보를 수신 및 재브로드캐스팅하기 위한 무선 통신 네트워크의 네트워크 노드(801, 901)로서,
프로세서(802, 902); 및
상기 프로세서에 커플링되는 메모리(803, 903)
를 포함하고,
상기 메모리는 명령어들(805, 905)을 포함하고, 상기 명령어들은, 상기 명령어들이 상기 프로세서에 의해 실행될 때, 상기 네트워크 노드로 하여금, 제20항 내지 제28항 중 어느 한 항에 기재된 방법을 수행하게 하는, 네트워크 노드(801, 901). - 무인 공중 운반체(UAV)(150)의 지오로케이션 정보를 수신 및 재브로드캐스팅하는 네트워크 노드(801, 901)의 프로세서(802, 902)에 의해 실행될 때, 상기 네트워크 노드로 하여금, 제20항 내지 제28항 중 어느 한 항에 기재된 방법을 수행하게 하는 명령어들(805, 905)을 저장하는, 컴퓨터 판독가능 저장 매체(803, 903).
- 프로세서(602)에 의해 실행될 때, UAV로 하여금, 제1항 내지 제17항 중 어느 한 항에 기재된 방법을 수행하게 하는 명령어들을 포함하는, 컴퓨터 프로그램(604, 605, 606, 607).
- 무인 공중 운반체(UAV)(150)의 지오로케이션 정보를 수신 및 재브로드캐스팅하는 네트워크 노드(801, 901)의 프로세서(802, 902)에 의해 실행될 때, 상기 네트워크 노드로 하여금, 제20항 내지 제28항 중 어느 한 항에 기재된 방법을 수행하게 하는 명령어들을 저장하는, 컴퓨터 프로그램(805, 905).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762480347P | 2017-03-31 | 2017-03-31 | |
| US62/480,347 | 2017-03-31 | ||
| PCT/IB2017/053477 WO2018178751A1 (en) | 2017-03-31 | 2017-06-12 | Broadcasting geolocation information in a radio frame transmitted from an unmanned aerial vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190134720A true KR20190134720A (ko) | 2019-12-04 |
| KR102269925B1 KR102269925B1 (ko) | 2021-06-29 |
Family
ID=59315667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197032304A Active KR102269925B1 (ko) | 2017-03-31 | 2017-06-12 | 무인 공중 운반체로부터 송신되는 라디오 프레임에서의 지오로케이션 정보를 브로드캐스팅하기 위한 방법, 장치, 및 컴퓨터 판독가능 저장 매체 |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US11817001B2 (ko) |
| EP (2) | EP4102485A1 (ko) |
| JP (1) | JP6853897B2 (ko) |
| KR (1) | KR102269925B1 (ko) |
| CN (1) | CN110662697B (ko) |
| AU (1) | AU2017406922B2 (ko) |
| MX (1) | MX2019011477A (ko) |
| RU (1) | RU2731942C1 (ko) |
| WO (1) | WO2018178751A1 (ko) |
| ZA (1) | ZA201907218B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220008523A (ko) * | 2020-07-14 | 2022-01-21 | 한국전자통신연구원 | 무인 비행체의 식별 방법 및 장치 |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108700668A (zh) * | 2017-06-29 | 2018-10-23 | 深圳市大疆创新科技有限公司 | 检测无人机的定位设备的方法、无人机 |
| WO2019033433A1 (en) * | 2017-08-18 | 2019-02-21 | Lenovo (Beijing) Limited | METHOD AND APPARATUS FOR CELL PROHIBITION |
| EP3711191B1 (en) * | 2017-11-17 | 2026-04-08 | Nokia Technologies Oy | Providing reference altitude information to unmanned aerial vehicles for configuration differentiation |
| US10976402B2 (en) * | 2018-09-24 | 2021-04-13 | Nokia Technologies Oy | Unmanned arial vehicle recovery mechanism |
| CN112088344B (zh) * | 2018-12-04 | 2024-02-02 | 深圳市大疆创新科技有限公司 | 控制可移动装置的移动的方法及系统 |
| AU2020204711A1 (en) | 2019-01-04 | 2021-07-08 | Iota Biosciences, Inc. | Power controls for an implantable device powered using ultrasonic waves |
| CN113226455A (zh) * | 2019-01-04 | 2021-08-06 | 艾奧塔生物科技公司 | 用于操作可植入设备的基于超声的协议 |
| US11158200B2 (en) * | 2019-04-05 | 2021-10-26 | At&T Intellectual Property I, L.P. | Decentralized collision avoidance for UAVs |
| JP2020198505A (ja) * | 2019-05-31 | 2020-12-10 | キヤノン株式会社 | 装置、およびそのプログラム |
| US11094209B1 (en) * | 2019-08-22 | 2021-08-17 | Facebook, Inc. | Location determination when satellite navigation system is inaccessible |
| CN112994858B (zh) * | 2019-12-17 | 2022-11-08 | 大唐移动通信设备有限公司 | 一种直通链路定位参考信号的发送、接收方法及终端 |
| CN113055136B (zh) | 2019-12-26 | 2022-08-30 | 大唐移动通信设备有限公司 | 一种定位参考信号的传输资源的配置、接收方法及终端 |
| WO2021209155A1 (en) * | 2020-04-17 | 2021-10-21 | Telefonaktiebolaget Lm Ericsson (Publ) | A method of and an unmanned aerial vehicle for acting upon a restriction in services for the uav, a uav control server and a base station |
| US11442140B1 (en) | 2020-06-16 | 2022-09-13 | Honeywell International Inc. | Determining a location of a vehicle using received surveillance signals |
| US11172019B1 (en) * | 2020-08-28 | 2021-11-09 | Tencent America LLC | Systems and methods for unmanned aerial system communication |
| CN116583893A (zh) * | 2020-12-07 | 2023-08-11 | 瑞典爱立信有限公司 | 无人驾驶飞行器(uav)、装置、第二装置以及由此执行以用于处置uav的至少一个方面的识别的方法 |
| JP7765926B2 (ja) * | 2021-09-21 | 2025-11-07 | 三菱重工業株式会社 | 学習装置、通信装置、無人機、無線通信システム、学習方法及び学習プログラム |
| JP7034362B1 (ja) | 2021-09-29 | 2022-03-11 | Kddi株式会社 | 飛行体情報管理装置、飛行体情報管理システム、飛行体情報管理方法、及びプログラム |
| US20250016561A1 (en) * | 2021-10-14 | 2025-01-09 | Telefonaktiebolaget Lm Ericsson (Publ) | First device, first node, node, and methods performed thereby for handling identification of the device |
| CN114007148B (zh) * | 2021-10-21 | 2023-05-05 | 贵州师范学院 | 基于LoRa网关无人机群的水文监测系统 |
| CN118451735A (zh) * | 2022-01-21 | 2024-08-06 | 联想(北京)有限公司 | 用于uav的广播远程id发射的方法及设备 |
| US20250294343A1 (en) * | 2022-04-25 | 2025-09-18 | Beijing Xiaomi Mobile Software Co., Ltd. | Method for sending capability information, method for capability determination, communication apparatus, and storage medium |
| CN117082458A (zh) * | 2022-05-10 | 2023-11-17 | 华为技术有限公司 | 无人机通信方法、装置及系统 |
| KR102862021B1 (ko) * | 2022-10-25 | 2025-09-22 | 주식회사 리하이 | 드론을 이용한 지능형 교통안전 고도화 시스템 |
| CN115884103A (zh) * | 2022-11-29 | 2023-03-31 | 亿航智能设备(广州)有限公司 | 一种编队无人驾驶航空器中继传输数据方法、系统和介质 |
| CN121531299A (zh) * | 2026-01-15 | 2026-02-13 | 荣耀终端股份有限公司 | 通信方法、装置、芯片系统、存储介质及程序产品 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2175290A1 (en) * | 2008-10-07 | 2010-04-14 | Honeywell International | Transponder-based beacon transmitter for see and avoid of unmanned aerial vehicles |
| US20160292403A1 (en) * | 2015-03-31 | 2016-10-06 | SZ DJI Technology Co., Ltd | Authentication systems and methods for generating flight regulations |
Family Cites Families (119)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6909702B2 (en) | 2001-03-28 | 2005-06-21 | Qualcomm, Incorporated | Method and apparatus for out-of-band transmission of broadcast service option in a wireless communication system |
| JP2003092545A (ja) | 2001-09-17 | 2003-03-28 | Telecommunication Advancement Organization Of Japan | 成層圏プラットフォームを利用した放送システム |
| US7697549B2 (en) | 2002-08-07 | 2010-04-13 | Extricom Ltd. | Wireless LAN control over a wired network |
| US7813326B1 (en) | 2005-05-27 | 2010-10-12 | Bluetronix Inc. | Swarm location service for mobile ad hoc network communications |
| US7581702B2 (en) | 2006-06-09 | 2009-09-01 | Insitu, Inc. | Wirelessly controlling unmanned aircraft and accessing associated surveillance data |
| JP4838181B2 (ja) | 2007-03-19 | 2011-12-14 | 株式会社エヌ・ティ・ティ・ドコモ | ハンドオーバ方法及び無線基地局 |
| CN101836478B (zh) | 2007-10-26 | 2013-04-17 | 华为技术有限公司 | 移动终端、网络实体及其相关方法 |
| US8437956B2 (en) * | 2008-02-15 | 2013-05-07 | Kutta Technologies, Inc. | Unmanned aerial system position reporting system and related methods |
| US8352175B2 (en) | 2008-12-17 | 2013-01-08 | International Business Machines Corporation | Generating optimal itineraries based on network connectivity |
| US8422460B2 (en) | 2009-04-06 | 2013-04-16 | Robert Bosch Gmbh | Method for performing proactive wireless communication handoffs using a mobile client's route information |
| AU2010301363B9 (en) | 2009-10-02 | 2014-08-14 | Ntt Docomo, Inc. | Mobile communication method, mobile management node and mobile station |
| US9488488B2 (en) | 2010-02-12 | 2016-11-08 | Apple Inc. | Augmented reality maps |
| EP2673656B1 (en) | 2011-02-09 | 2021-03-31 | Raytheon Company | Adaptive electronically steerable array (aesa) system for multi-band and multi-aperture operation and method for maintaining data links with one or more stations in different frequency bands |
| WO2012112097A1 (en) | 2011-02-18 | 2012-08-23 | Telefonaktiebolaget L M Ericsson (Publ) | Methods and devices for providing guaranteed quality of service |
| US9119167B2 (en) * | 2011-08-30 | 2015-08-25 | Qualcomm Incorporated | Generic broadcast of location assistance data |
| CA2872698C (en) * | 2012-05-04 | 2018-07-24 | Aeryon Labs Inc. | System and method for controlling unmanned aerial vehicles |
| US9384668B2 (en) * | 2012-05-09 | 2016-07-05 | Singularity University | Transportation using network of unmanned aerial vehicles |
| US9043135B2 (en) | 2012-08-31 | 2015-05-26 | Apple Inc. | Navigation system acquisition and use of cellular coverage map data |
| WO2014047927A1 (zh) | 2012-09-29 | 2014-04-03 | 华为技术有限公司 | 控制信息发送方法、接收方法和设备 |
| US9310477B1 (en) * | 2013-01-29 | 2016-04-12 | The Boeing Company | Systems and methods for monitoring airborne objects |
| US10244504B2 (en) * | 2013-03-15 | 2019-03-26 | DGS Global Systems, Inc. | Systems, methods, and devices for geolocation with deployable large scale arrays |
| EP2983306B1 (en) | 2013-04-05 | 2020-02-19 | LG Electronics Inc. | Method for transmitting uplink control information in wireless access system and apparatus therefor |
| US20150038140A1 (en) | 2013-07-31 | 2015-02-05 | Qualcomm Incorporated | Predictive mobility in cellular networks |
| US20150119043A1 (en) | 2013-10-31 | 2015-04-30 | Qualcomm Incorporated | Pruning target inter-radio access technology (irat) handover candidate cells |
| US10332405B2 (en) * | 2013-12-19 | 2019-06-25 | The United States Of America As Represented By The Administrator Of Nasa | Unmanned aircraft systems traffic management |
| EP3097718A4 (en) | 2014-01-20 | 2018-01-03 | Nokia Solutions and Networks Oy | Dynamic automated neighbor list management in self-optimizing network |
| IN2014MU00351A (ko) | 2014-01-31 | 2015-09-11 | Tata Consultancy Services Ltd | |
| US10416666B2 (en) | 2014-03-26 | 2019-09-17 | Unanimous A. I., Inc. | Methods and systems for collaborative control of a remote vehicle |
| CN105101314A (zh) | 2014-04-29 | 2015-11-25 | 北京三星通信技术研究有限公司 | 一种切换报告及rlf报告的发送方法和设备 |
| JP6567652B2 (ja) * | 2014-05-01 | 2019-08-28 | アラカイ テクノロジーズ コーポレーション | 個人航空輸送および有人または無人動作のためのクリーン燃料の電気マルチローター航空機 |
| US9537954B2 (en) * | 2014-05-19 | 2017-01-03 | EpiSys Science, Inc. | Method and apparatus for biologically inspired autonomous infrastructure monitoring |
| US9542850B2 (en) | 2014-05-20 | 2017-01-10 | Verizon Patent And Licensing Inc. | Secure communications with unmanned aerial vehicles |
| US9569972B2 (en) | 2014-05-20 | 2017-02-14 | Verizon Patent And Licensing Inc. | Unmanned aerial vehicle identity and capability verification |
| US9881022B2 (en) | 2014-05-20 | 2018-01-30 | Verizon Patent And Licensing Inc. | Selection of networks for communicating with unmanned aerial vehicles |
| CN104053195B (zh) | 2014-06-30 | 2018-03-27 | 京信通信系统(中国)有限公司 | 一种确定黑名单列表成员的方法及装置 |
| CN106068592B (zh) * | 2014-08-08 | 2021-06-11 | 深圳市大疆创新科技有限公司 | 无人飞行器电池更换系统及方法 |
| JP6395835B2 (ja) * | 2014-08-08 | 2018-09-26 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | Uavのバッテリー電源バックアップシステムおよび方法 |
| US20170081026A1 (en) | 2014-09-03 | 2017-03-23 | Infatics, Inc. (DBA DroneDeploy) | System and methods for hosting missions with unmanned aerial vehicles |
| CN114675671B (zh) | 2014-09-05 | 2025-10-21 | 深圳市大疆创新科技有限公司 | 多传感器环境地图构建 |
| US9754496B2 (en) * | 2014-09-30 | 2017-09-05 | Elwha Llc | System and method for management of airspace for unmanned aircraft |
| JP6425968B2 (ja) * | 2014-10-29 | 2018-11-21 | ヤンマー株式会社 | ヘリコプター |
| US9479337B2 (en) * | 2014-11-14 | 2016-10-25 | Motorola Solutions, Inc. | Method and apparatus for deriving a certificate for a primary device |
| US10154440B2 (en) | 2014-11-14 | 2018-12-11 | Parallel Wireless, Inc. | Seamless mobile handover |
| US10341970B2 (en) | 2014-11-17 | 2019-07-02 | Qualcomm Incorporated | Techniques for transmitting synchronization signals in a shared radio frequency spectrum band |
| US20160140851A1 (en) | 2014-11-18 | 2016-05-19 | Ziv LEVY | Systems and methods for drone navigation |
| WO2016078093A1 (en) * | 2014-11-21 | 2016-05-26 | SZ DJI Technology Co., Ltd. | System and method for managing unmanned aerial vehicles |
| RS56866B1 (sr) | 2014-12-01 | 2018-04-30 | Tata Consultancy Services Ltd | Selekcija ciljne ćelije tokom hendovera |
| US9752878B2 (en) | 2014-12-09 | 2017-09-05 | Sikorsky Aircraft Corporation | Unmanned aerial vehicle control handover planning |
| US9820264B2 (en) * | 2015-03-09 | 2017-11-14 | Ofinno Technologies, Llc | Data and multicast signals in a wireless device and wireless network |
| CN107531326B (zh) | 2015-03-12 | 2019-04-16 | 奈庭吉尔智慧系统公司 | 自动化无人机系统 |
| WO2016154551A1 (en) | 2015-03-26 | 2016-09-29 | Matternet, Inc. | Route planning for unmanned aerial vehicles |
| WO2016161637A1 (en) | 2015-04-10 | 2016-10-13 | SZ DJI Technology Co., Ltd. | Method, apparatus and system of providing communication coverage to an unmanned aerial vehicle |
| WO2016164892A1 (en) | 2015-04-10 | 2016-10-13 | The Board Of Regents Of The Nevada System Of Higher Education On Behalf Of The University Of Nevada, Las Vegas | Methods and systems for unmanned aircraft system (uas) traffic management |
| US20170023939A1 (en) | 2015-05-06 | 2017-01-26 | Joel David Krouse | System and Method for Controlling an Unmanned Aerial Vehicle over a Cellular Network |
| US9660718B2 (en) | 2015-05-13 | 2017-05-23 | Ubiqomm, LLC | Ground terminal and UAV beam pointing in an unmanned aerial vehicle (UAV) for network access |
| CN114257627B (zh) * | 2015-05-28 | 2025-02-28 | 罗克韦尔柯林斯公司 | 生成支持区域、国内和国际无人机系统的基于网络云系统的系统及方法 |
| US10210527B2 (en) | 2015-06-04 | 2019-02-19 | Chronicled, Inc. | Open registry for identity of things including social record feature |
| US9836047B2 (en) | 2015-06-10 | 2017-12-05 | Kespry, Inc. | Aerial vehicle data communication system |
| US10453348B2 (en) * | 2015-06-15 | 2019-10-22 | ImageKeeper LLC | Unmanned aerial vehicle management |
| US9467922B1 (en) | 2015-06-15 | 2016-10-11 | Amazon Technologies, Inc. | Cellular connections between user equipment and wireless stations based on user equipment location and wireless station locations |
| US9818303B2 (en) | 2015-06-16 | 2017-11-14 | Verizon Patent And Licensing Inc. | Dynamic navigation of UAVs using three dimensional network coverage information |
| US20160371987A1 (en) | 2015-06-17 | 2016-12-22 | Verizon Patent And Licensing Inc. | Command and control interface for uavs communication through a mobile wireless network |
| US9363690B1 (en) | 2015-07-10 | 2016-06-07 | Cisco Technology, Inc. | Closed-loop optimization of a wireless network using an autonomous vehicle |
| WO2017019595A1 (en) | 2015-07-27 | 2017-02-02 | Genghiscomm Holdings, LLC | Airborne relays in cooperative-mimo systems |
| US10185316B2 (en) | 2015-08-10 | 2019-01-22 | Edward Kablaoui | System and method for drone connectivity and communication over a cellular network |
| EP3139516A1 (en) | 2015-09-03 | 2017-03-08 | BAE Systems PLC | Apparatus and method for communications management in an uav |
| EP3349085B1 (en) | 2015-09-09 | 2020-05-06 | Tecteco Security Systems, S.L. | Secure control of unmanned vehicles |
| EP3350795A1 (en) | 2015-09-18 | 2018-07-25 | Moog Inc. | Cellular aerial vehicle traffic control system and method |
| DE102015012477A1 (de) | 2015-09-29 | 2017-03-30 | Airbus Defence and Space GmbH | Unbemanntes Luftfahrzeug und Verfahren zur sicheren Landung eines unbemannten Luftfahrzeugs |
| KR101608191B1 (ko) * | 2015-10-28 | 2016-04-04 | (주)유양디앤유 | 가시광 통신을 활용한 조명장치 제어방법 및 장치 |
| CN105278544B (zh) | 2015-10-30 | 2018-05-08 | 小米科技有限责任公司 | 无人飞行器的控制方法及装置 |
| US9940842B2 (en) * | 2015-11-02 | 2018-04-10 | At&T Intellectual Property I, L.P. | Intelligent drone traffic management via radio access network |
| US20170142766A1 (en) | 2015-11-17 | 2017-05-18 | Electronics And Telecommunications Research Institute | Method and apparatus for controlling access of terminal equipment in wireless communication system |
| US9918235B2 (en) | 2015-11-24 | 2018-03-13 | Verizon Patent And Licensing Inc. | Adaptive antenna operation for UAVs using terrestrial cellular networks |
| KR101782283B1 (ko) | 2015-12-14 | 2017-09-26 | 텔레폰악티에볼라겟엘엠에릭슨(펍) | 무선 네트워크 조건들에 기반한 계획된 운동의 조정 |
| US9618940B1 (en) | 2015-12-31 | 2017-04-11 | Unmanned Innovation, Inc. | Unmanned aerial vehicle rooftop inspection system |
| US9537561B1 (en) | 2016-01-21 | 2017-01-03 | Verizon Patent And Licensing Inc. | Optimization of communications with UAVS using terrestrial cellular networks |
| US9714012B1 (en) * | 2016-01-22 | 2017-07-25 | International Business Machines Corporation | Power source element replacement during vehicle operation |
| US9764703B2 (en) * | 2016-01-22 | 2017-09-19 | International Business Machines Corporation | Power source element detection and monitoring |
| US10762795B2 (en) | 2016-02-08 | 2020-09-01 | Skydio, Inc. | Unmanned aerial vehicle privacy controls |
| BE1023995B1 (nl) | 2016-03-04 | 2017-10-26 | Unifly N.V. | Platform voor Coördinatie van Operaties op Zeer Laag Niveau |
| EP3836661B1 (en) * | 2016-03-25 | 2023-02-22 | Panasonic Intellectual Property Corporation of America | Improved allocation of radio resources for vehicular communication |
| US9998854B2 (en) * | 2016-04-11 | 2018-06-12 | Qualcomm Incorporated | Access point mobility indication |
| CN109392310B (zh) | 2016-04-14 | 2023-10-20 | 荣布斯系统集团公司 | 验证无人驾驶飞行器完整性的系统 |
| US10023309B2 (en) * | 2016-04-15 | 2018-07-17 | James Brown | Remote controlled aircraft |
| CN105828345B (zh) | 2016-05-06 | 2020-03-27 | 华南农业大学 | 一种兼容uav的地空无线传感网络通信装置与方法 |
| US20200005651A1 (en) | 2016-06-10 | 2020-01-02 | ETAK Systems, LLC | Apparatus for controlling unmanned aerial vehicles and passenger drones via an air traffic control system |
| US10723483B2 (en) | 2016-06-10 | 2020-07-28 | ETAK Systems, LLC | Elevator or tube lift for drone takeoff and control thereof via air traffic control systems |
| US11356798B2 (en) | 2016-07-01 | 2022-06-07 | Intel Corporation | Internet-of-things swarm management |
| US9815633B1 (en) * | 2016-09-19 | 2017-11-14 | Amazon Technologies, Inc. | Automated fulfillment of unmanned aerial vehicles |
| CA3030349A1 (en) * | 2016-09-28 | 2018-05-05 | Federal Express Corporation | Systems and methods for monitoring the internal storage contents of a shipment storage using one or more internal monitor drones |
| US10467685B1 (en) * | 2016-10-01 | 2019-11-05 | Stuart Brisson | System and device for rental dispensing of UAVs |
| US10614515B1 (en) * | 2016-10-01 | 2020-04-07 | Stuart Brisson | System for rental dispensing of UAVs |
| US10153837B2 (en) * | 2016-10-28 | 2018-12-11 | Wipro Limited | Controller and associated method for selecting visible light communication personal area network coordinator (VPANC) |
| US9882640B1 (en) * | 2016-10-28 | 2018-01-30 | Wipro Limited | Visible light communication personal area network coordinator (VPANC) and associated method for selecting suitable VPANCs |
| US10142019B2 (en) * | 2016-10-30 | 2018-11-27 | Wipro Limited | End user device and associated method for selecting visible light communication personal area network coordinator |
| US11044192B2 (en) * | 2016-11-15 | 2021-06-22 | Lg Electronics Inc. | Signal transmission/reception method for V2X communication in wireless communication system and device therefor |
| US11349912B2 (en) | 2016-11-29 | 2022-05-31 | Level 3 Communications, Llc | Cross-cluster direct server return in a content delivery network (CDN) |
| CN114900858A (zh) | 2016-12-30 | 2022-08-12 | 英特尔公司 | 用于无线电通信的方法和设备 |
| US11297470B2 (en) * | 2017-01-17 | 2022-04-05 | Qualcomm Incorporated | User location aware smart event handling |
| US10304343B2 (en) | 2017-02-24 | 2019-05-28 | At&T Mobility Ii Llc | Flight plan implementation, generation, and management for aerial devices |
| US9718564B1 (en) * | 2017-03-16 | 2017-08-01 | Amazon Technologies, Inc. | Ground-based mobile maintenance facilities for unmanned aerial vehicles |
| US10421542B2 (en) * | 2017-03-16 | 2019-09-24 | Amazon Technologies, Inc. | Mobile fulfillment centers with intermodal carriers and unmanned aerial vehicles |
| US10384692B2 (en) * | 2017-03-16 | 2019-08-20 | Amazon Technologies, Inc. | Demand-based distribution of items using intermodal carriers and unmanned aerial vehicles |
| KR102799664B1 (ko) | 2017-03-23 | 2025-04-23 | 프라운호퍼 게젤샤프트 쭈르 푀르데룽 데어 안겐반텐 포르슝 에. 베. | 셀룰러 네트워크에서 선점적 핸드오버 준비 및 추적/페이징 영역 처리 및 지능형 루트 선택 |
| US10638501B2 (en) | 2017-03-24 | 2020-04-28 | Qualcomm Incorporated | Opportunistic uplink transmission |
| WO2018178759A1 (en) | 2017-03-31 | 2018-10-04 | Telefonaktiebolaget Lm Ericsson (Publ) | Enhanced flight plan for unmanned traffic aircraft systems |
| US10383081B2 (en) * | 2017-05-05 | 2019-08-13 | Qualcomm Incorporated | Methods and systems for positioning of a mobile device using broadcast of assistance data |
| US10210764B2 (en) | 2017-07-07 | 2019-02-19 | Verizon Patent And Licensing Inc. | Aerial radio frequency (RF) management |
| US10899473B2 (en) * | 2017-07-17 | 2021-01-26 | Christopher Julian Scherz | Docking station for unmanned aerial vehicles |
| US10785113B2 (en) * | 2017-11-13 | 2020-09-22 | Veniam, Inc. | Systems and methods for self-configuring nodes and modes of communication in a network of moving things |
| US10974911B2 (en) * | 2017-12-22 | 2021-04-13 | Wing Aviation Llc | Replenishment station for aerial vehicle with robotic device and conveyor |
| US10780975B2 (en) * | 2018-04-27 | 2020-09-22 | Wing Aviation Llc | Clip-on propeller mount |
| US10493863B1 (en) * | 2018-06-14 | 2019-12-03 | Kitty Hawk Corporation | Charge related processing for a personal transportation system with removable battery |
| US10532815B1 (en) * | 2018-06-14 | 2020-01-14 | Kitty Hawk Corporation | Two vehicle transportation system |
| US10703480B1 (en) * | 2018-06-14 | 2020-07-07 | Kitty Hawk Corporation | Modular personal transportation system |
| US11287835B2 (en) * | 2019-03-21 | 2022-03-29 | Wing Aviation Llc | Geo-fiducials for UAV navigation |
| US10953754B1 (en) * | 2019-09-05 | 2021-03-23 | Beta Air, Llc | Systems and methods for restricting power to a load to prevent engaging circuit protection |
| US11958183B2 (en) | 2019-09-19 | 2024-04-16 | The Research Foundation For The State University Of New York | Negotiation-based human-robot collaboration via augmented reality |
-
2017
- 2017-06-12 KR KR1020197032304A patent/KR102269925B1/ko active Active
- 2017-06-12 WO PCT/IB2017/053477 patent/WO2018178751A1/en not_active Ceased
- 2017-06-12 EP EP22188238.4A patent/EP4102485A1/en not_active Withdrawn
- 2017-06-12 US US16/499,202 patent/US11817001B2/en active Active
- 2017-06-12 AU AU2017406922A patent/AU2017406922B2/en active Active
- 2017-06-12 CN CN201780091426.4A patent/CN110662697B/zh active Active
- 2017-06-12 MX MX2019011477A patent/MX2019011477A/es unknown
- 2017-06-12 RU RU2019134828A patent/RU2731942C1/ru active
- 2017-06-12 EP EP17737873.4A patent/EP3601040B1/en active Active
- 2017-06-12 JP JP2019553008A patent/JP6853897B2/ja active Active
-
2019
- 2019-10-30 ZA ZA2019/07218A patent/ZA201907218B/en unknown
-
2021
- 2021-06-24 US US17/356,994 patent/US12008912B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2175290A1 (en) * | 2008-10-07 | 2010-04-14 | Honeywell International | Transponder-based beacon transmitter for see and avoid of unmanned aerial vehicles |
| US20160292403A1 (en) * | 2015-03-31 | 2016-10-06 | SZ DJI Technology Co., Ltd | Authentication systems and methods for generating flight regulations |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220008523A (ko) * | 2020-07-14 | 2022-01-21 | 한국전자통신연구원 | 무인 비행체의 식별 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210319710A1 (en) | 2021-10-14 |
| RU2731942C1 (ru) | 2020-09-09 |
| JP2020516161A (ja) | 2020-05-28 |
| JP6853897B2 (ja) | 2021-03-31 |
| EP3601040B1 (en) | 2022-08-03 |
| EP3601040A1 (en) | 2020-02-05 |
| KR102269925B1 (ko) | 2021-06-29 |
| CN110662697B (zh) | 2023-06-27 |
| MX2019011477A (es) | 2019-11-21 |
| ZA201907218B (en) | 2021-01-27 |
| AU2017406922A1 (en) | 2019-10-17 |
| US20200105151A1 (en) | 2020-04-02 |
| CN110662697A (zh) | 2020-01-07 |
| AU2017406922B2 (en) | 2021-10-21 |
| US11817001B2 (en) | 2023-11-14 |
| US12008912B2 (en) | 2024-06-11 |
| EP4102485A1 (en) | 2022-12-14 |
| WO2018178751A1 (en) | 2018-10-04 |
| BR112019020290A2 (pt) | 2020-04-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12008912B2 (en) | Broadcasting geolocation information in a radio frame transmitted from an unmanned aerial vehicle | |
| US12504753B2 (en) | Circuit, base station, method, and recording medium | |
| US11721221B2 (en) | Navigation systems and methods for drones | |
| US11184083B2 (en) | Maintaining network connectivity of aerial devices during unmanned flight | |
| TWI732118B (zh) | 在第三代合作夥伴計劃網路中使用無人機飛行路徑協調增強切換的方法和系統 | |
| CN111066342B (zh) | 基于无人驾驶飞行器飞行路径信息的无线电资源分配优化 | |
| CN108886514B (zh) | 基于小区广播消息的飞行路径控制 | |
| US11657720B2 (en) | Network coverage and policy information generation and distribution for unmanned aerial vehicle flight planning | |
| US10663597B1 (en) | Dual-technology onboard air traffic tracking system for autonomous aerial vehicles | |
| HK40013644B (en) | Broadcasting geolocation information in a radio frame transmitted from an unmanned aerial vehicle | |
| OA19800A (en) | Broadcasting geolocation information in a radio frame transmitted from an unmanned aerial vehicle. | |
| HK40013644A (en) | Broadcasting geolocation information in a radio frame transmitted from an unmanned aerial vehicle | |
| WO2023001397A1 (en) | Methods and apparatus for determining a uav route | |
| BR112019020290B1 (pt) | Método para um veículo aéreo não tripulado difundir informações de geolocalização, aparelho, e meio de armazenamento legível por computador | |
| CN112578808B (zh) | 信息收集的方法、装置、计算机设备和存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
Patent event date: 20191031 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20191031 Comment text: Request for Examination of Application |
|
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200807 Patent event code: PE09021S01D |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20210223 Patent event code: PE09021S02D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20210603 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20210622 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20210623 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20240605 Start annual number: 4 End annual number: 4 |