KR20190138700A - 전동 차량의 제어 방법 및 제어 장치 - Google Patents
전동 차량의 제어 방법 및 제어 장치 Download PDFInfo
- Publication number
- KR20190138700A KR20190138700A KR1020197035855A KR20197035855A KR20190138700A KR 20190138700 A KR20190138700 A KR 20190138700A KR 1020197035855 A KR1020197035855 A KR 1020197035855A KR 20197035855 A KR20197035855 A KR 20197035855A KR 20190138700 A KR20190138700 A KR 20190138700A
- Authority
- KR
- South Korea
- Prior art keywords
- motor
- command value
- torque command
- angular velocity
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/46—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors for speed regulation of two or more dynamo-electric motors in relation to one another
- H02P5/52—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors for speed regulation of two or more dynamo-electric motors in relation to one another additionally providing control of relative angular displacement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2009—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/46—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors for speed regulation of two or more dynamo-electric motors in relation to one another
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/42—Electrical machine applications with use of more than one motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/46—Wheel motors, i.e. motor connected to only one wheel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/46—Drive Train control parameters related to wheels
- B60L2240/461—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/10—Emission reduction
- B60L2270/14—Emission reduction of noise
- B60L2270/145—Structure borne vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/82—Four wheel drive systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Multiple Motors (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
Description
도 2는, 전동 모터 컨트롤러에 의해 행해지는 처리의 흐름을 나타내는 흐름도이다.
도 3은, 액셀러레이터 개방도-토크 테이블의 일례를 나타내는 도면이다.
도 4는, 본 발명의 제어 장치가 적용되는 전동 차량의 시스템 구성(시스템 구성 2)을 나타내는 블록도이다.
도 5는, 전동 모터 컨트롤러에 의해 행해지는 처리의 흐름을 나타내는 흐름도이다.
도 6은, 전후 구동력 분배 처리를 설명하기 위한 도면이다.
도 7은, 4WD 차량의 운동 방정식을 설명하는 도면이다.
도 8은, 제1 실시 형태의 제진 제어 연산 처리를 실현하는 블록 구성도이다.
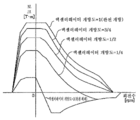
도 9는, 제1, 제2, 제4 실시 형태의 제어 장치를 전동 차량에 적용했을 때의 제어 결과의 일례와, 종래예에 따른 제어 결과를 나타낸 타임차트이다.
도 10은, 제2 실시 형태의 제진 제어 연산 처리를 실현하는 블록 구성도이다.
도 11은, 제2 실시 형태의 4WD 차량 모델을 나타내는 블록 구성도이다.
도 12는, 제2 실시 형태의 프론트 F/F 보상기를 나타내는 블록 구성도이다.
도 13은, 제2 실시 형태의 프론트/리어 F/F 보상기를 나타내는 블록 구성도이다.
도 14는, 제2 실시 형태의 리어 F/F 보상기를 나타내는 블록 구성도이다.
도 15는, 2WD 차량의 운동 방정식을 설명하는 도면이다.
도 16은, 제3 실시 형태의 제진 제어 연산 처리를 실현하는 블록 구성도이다.
도 17은, 제3 실시 형태의 F/F 보상기를 나타내는 블록 구성도이다.
도 18은, 제3 실시 형태의 F/B 보상기를 나타내는 블록 구성도이다.
도 19는, 제3 실시 형태의 제어 장치를 전동 차량에 적용했을 때의 제어 결과의 일례와, 종래예에 관한 제어 결과를 나타낸 타임차트이다.
도 20은, 제4 실시 형태의 제진 제어 연산 처리를 실현하는 블록 구성도이다.
도 21은, 제4 실시 형태의 F/F 보상기를 나타내는 블록 구성도이다.






















































Claims (13)
- 차량 정보에 기초하여 모터 토크 명령값을 설정하고, 프론트 구동륜 및 리어 구동륜 중 한쪽 구동륜을 제1 구동륜으로 하여 당해 제1 구동륜에 연결되는 제1 모터의 토크를 제어하는 전동 차량의 제어 방법으로서,
상기 모터 토크 명령값에 기초하는 피드 포워드 연산에 의해 제1 토크 명령값을 산출하고,
상기 제1 모터의 회전 각속도를 검출하고,
상기 제1 토크 명령값에 기초하여, 상기 제1 구동륜에 대한 토크 입력으로부터 상기 제1 모터의 회전 각속도까지의 전달 특성을 모의한 차량 모델 Gp(s)를 사용하여 상기 제1 모터의 회전 각속도를 추정하고,
상기 차량 모델 Gp(s)의 역특성과, 차량의 비틀림 진동 주파수 근방의 주파수를 중심 주파수로 하는 대역 통과 필터 H(s)로 구성되는 필터 H(s)/Gp(s)를 사용하여, 상기 제1 모터의 회전 각속도 검출값과 추정값의 편차로부터 제2 토크 명령값을 산출하고,
상기 제1 토크 명령값과 상기 제2 토크 명령값을 가산하여 얻어지는 제1 최종 토크 명령값에 따라서 상기 제1 모터의 토크를 제어하고,
상기 제1 구동륜과는 다른 구동륜인 제2 구동륜의 제구동 토크가 입력될 때에는, 당해 제구동 토크에 기초하여 상기 제1 모터의 회전 각속도 추정값을 보정하는,
전동 차량의 제어 방법. - 제1항에 있어서,
상기 제1 구동륜과는 다른 구동륜인 제2 구동륜의 제구동 토크가 입력될 때에는, 당해 제구동 토크를 입력으로 하여, 미리 모델화된 상기 제2 구동륜에 대한 상기 제1 모터의 회전 각속도 전달 함수를 이용하여 모터 회전 각속도 보정량을 산출하고,
상기 모터 회전 각속도 보정량에 기초하여 상기 제1 모터의 회전 각속도 추정값을 보정하는,
전동 차량의 제어 방법. - 제1항에 있어서,
상기 전동 차량이 상기 제2 구동륜의 동력원으로서 제2 모터를 구비하는 경우에는,
상기 차량 모델 Gp(s)는, 상기 제1 구동륜 및 상기 제2 구동륜에 대한 토크 입력으로부터 상기 제1 모터 및 상기 제2 모터의 모터 회전 각속도로의 전달 특성을 모의한 4WD 차량 모델로서,
상기 모터 토크 명령값에 기초하는 피드 포워드 연산에 의해 제3 토크 명령값을 산출하고,
상기 제2 모터의 회전 각속도를 검출하고,
상기 제2 구동륜에의 토크 입력으로부터 상기 제2 모터의 모터 회전 각속도까지의 전달 특성을 모의한 차량 모델 Gpr(s)의 역특성과, 차량의 비틀림 진동 주파수 근방의 주파수를 중심 주파수로 하는 대역 통과 필터 H(s)로 구성되는 필터 H(s)/Gpr(s)를 사용하여, 상기 제2 모터의 회전 각속도 검출값과 추정값의 편차로부터 제4 토크 명령값을 산출하고,
상기 제3 토크 명령값과 상기 제4 토크 명령값을 가산하여 얻어지는 제2 최종 토크 명령값에 따라서 상기 제2 모터의 토크를 제어하고,
상기 제1 토크 명령값과 상기 제3 토크 명령값을 입력으로 하고, 상기 4WD 차량 모델을 사용하여, 상기 제1 모터의 회전 각속도 추정값과 상기 제2 모터의 회전 각속도 추정값을 산출함과 함께, 상기 제3 토크 명령값에 기초하여 상기 제1 모터의 회전 각속도 추정값을 보정하는,
전동 차량의 제어 방법. - 제1항에 있어서,
상기 전동 차량이 상기 제2 구동륜의 동력원으로서 제2 모터를 구비하는 경우에는,
상기 차량 모델 Gp(s)는, 상기 제1 구동륜 및 상기 제2 구동륜으로의 토크 입력과 상기 제1 모터 및 상기 제2 모터의 모터 회전 각속도까지의 전달 특성을 모의한 4WD 차량 모델로서,
상기 모터 토크 명령값에 기초하는 피드 포워드 연산에 의해 제3 토크 명령값을 산출하고,
상기 제2 모터의 회전 각속도를 검출하고,
상기 제2 모터의 회전 각속도 검출값과 추정값의 편차로부터 제4 토크 명령값을 산출하고,
상기 제3 토크 명령값과 상기 제4 토크 명령값을 가산하여 얻어지는 제2 최종 토크 명령값에 따라서 상기 제2 모터의 토크를 제어하고,
상기 피드 포워드 연산에서는,
상기 모터 토크 명령값을 상기 제1 구동륜에 대한 제1 목표 토크 명령값과 상기 제2 구동륜에 대한 제2 목표 토크 명령값으로 분배하고,
상기 제1 목표 토크 명령값과 상기 제2 목표 토크 명령값을 입력으로 하고, 상기 4WD 차량 모델을 사용하여, 상기 제1 모터의 회전 각속도 추정값과 상기 제2 모터의 회전 각속도 추정값과 상기 제1 구동륜의 구동축 비틀림 각속도 추정값과 상기 제2 구동륜의 구동축 비틀림 각속도 추정값을 산출함과 함께, 상기 제2 목표 토크 명령값에 기초하여 상기 제1 모터의 회전 각속도 추정값을 보정하고,
상기 제1 목표 토크 명령값으로부터 상기 제1 구동륜의 구동축 비틀림 각속도 추정값에 소정의 게인을 곱한 값을 감산함으로써 상기 제1 토크 명령값을 산출하고,
상기 제2 목표 토크 명령값으로부터 상기 제2 구동륜의 구동축 비틀림 각속도 추정값에 소정의 게인을 곱한 값을 감산함으로써 상기 제3 토크 명령값을 산출하는,
전동 차량의 제어 방법. - 제3항 또는 제4항에 있어서,
상기 제1 구동륜의 구동축 비틀림 진동 주파수와, 상기 제2 구동륜의 구동축 비틀림 진동 주파수가 상이한 경우에는, 상기 제1 토크 명령값을 산출하는 피드 포워드 연산에 있어서 사용하는 규범 응답과, 상기 제3 토크 명령값을 산출하는 피드 포워드 연산에 있어서 사용하는 규범 응답을 일치시키는,
전동 차량의 제어 방법. - 제5항에 있어서,
상기 제1 구동륜의 구동축 비틀림 진동 주파수보다 상기 제2 구동륜의 구동축 비틀림 진동 주파수가 작은 경우에는, 상기 제1 토크 명령값을 산출하는 피드 포워드 연산에 있어서 사용하는 규범 응답을, 상기 제3 토크 명령값을 산출하는 피드 포워드 연산에 있어서 사용하는 규범 응답에 일치시키고,
상기 제2 구동륜의 구동축 비틀림 진동 주파수보다 상기 제1 구동륜의 구동축 비틀림 진동 주파수가 작은 경우에는, 상기 제3 토크 명령값을 산출하는 피드 포워드 연산에 있어서 사용하는 규범 응답을, 상기 제1 토크 명령값을 산출하는 피드 포워드 연산에 있어서 사용하는 규범 응답에 일치시키는,
전동 차량의 제어 방법. - 제5항에 있어서,
상기 제1 구동륜의 구동축 비틀림 진동 주파수를 감쇠시키는 전달 특성을 갖는 필터를 사용한 피드 포워드 연산에 의해 상기 제1 토크 명령값을 산출하고,
상기 제2 구동륜의 구동축 비틀림 진동 주파수를 감쇠시키는 전달 특성을 갖는 필터를 사용한 피드 포워드 연산에 의해 상기 제3 토크 명령값을 산출하는,
전동 차량의 제어 방법. - 제2항에 있어서,
상기 제2 구동륜에 대한 상기 제1 모터의 회전 각속도 전달 함수의 필터는, 상기 제1 구동륜 및 상기 제2 구동륜 중 적어도 한쪽 비틀림 진동 주파수를 차단 주파수로 설정한 필터에 근사되는,
전동 차량의 제어 방법. - 제2항에 있어서,
상기 제2 구동륜에 대한 상기 제1 모터의 회전 각속도 전달 함수의 필터는, 상기 제2 구동륜에 대한 상기 제1 모터의 회전 각속도 전달 특성의 게인 성분을 구성하도록 근사되는,
전동 차량의 제어 방법. - 제2항에 있어서,
상기 제2 구동륜에 대한 상기 제1 모터의 회전 각속도 전달 함수의 필터는, 분모에 비틀림 진동 주파수에 기인하는 감쇠 계수를 갖고,
상기 감쇠 계수가 1 미만이 되는 특성을 갖는 경우에는, 당해 감쇠 계수를 1 이상의 값으로 설정하는,
전동 차량의 제어 방법. - 제2항에 있어서,
상기 피드 포워드 연산에서는, 상기 제1 모터의 토크가 구동축 토크에 전달되지 않는 불감대를 갖는 불감대 차량 모델을 사용하여, 상기 모터 토크 명령값으로부터 구동축 비틀림 각속도를 산출하고, 산출된 상기 구동축 비틀림 각속도를 상기 모터 토크 명령값에 피드백시킴으로써 상기 제1 토크 명령값을 산출하는,
전동 차량의 제어 방법. - 제2항에 있어서,
상기 차량 모델 Gp(s)는, 상기 제1 구동륜 및 상기 제2 구동륜에 대한 토크 입력으로부터 상기 제1 모터 및 상기 제2 구동륜의 동력원으로서의 제2 모터의 모터 회전 각속도까지의 전달 특성을 모의한 4WD 차량 모델인,
전동 차량의 제어 방법. - 차량 정보에 기초하여 모터 토크 명령값을 설정하고, 프론트 구동륜 및 리어 구동륜 중 한쪽 제1 구동륜에 연결되는 제1 모터의 토크를 제어하는 컨트롤러를 구비하는 전동 차량의 제어 장치로서,
상기 컨트롤러는,
상기 모터 토크 명령값에 기초하는 피드 포워드 연산에 의해 제1 토크 명령값을 산출하고,
상기 제1 모터의 회전 각속도를 검출하고,
상기 제1 토크 명령값에 기초하여, 상기 제1 구동륜에 대한 토크 입력으로부터 상기 제1 모터의 회전 각속도까지의 전달 특성을 모의한 차량 모델 Gp(s)를 사용하여 상기 제1 모터의 회전 각속도를 추정하고,
상기 차량 모델 Gp(s)의 역특성과, 차량의 비틀림 진동 주파수 근방의 주파수를 중심 주파수로 하는 대역 통과 필터 H(s)로 구성되는 필터 H(s)/Gp(s)를 사용하여, 상기 제1 모터의 회전 각속도 검출값과 추정값의 편차로부터 제2 토크 명령값을 산출하고,
상기 제1 토크 명령값과 상기 제2 토크 명령값을 가산하여 얻어지는 제1 최종 토크 명령값에 따라서 상기 제1 모터의 토크를 제어하고,
상기 제1 구동륜과는 다른 구동륜인 제2 구동륜의 제구동 토크가 입력될 때에는, 당해 제구동 토크에 기초하여 상기 제1 모터의 회전 각속도 추정값을 보정하는,
전동 차량의 제어 장치.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/020521 WO2018220805A1 (ja) | 2017-06-01 | 2017-06-01 | 電動車両の制御方法、及び、制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190138700A true KR20190138700A (ko) | 2019-12-13 |
| KR102131729B1 KR102131729B1 (ko) | 2020-07-08 |
Family
ID=64455254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197035855A Expired - Fee Related KR102131729B1 (ko) | 2017-06-01 | 2017-06-01 | 전동 차량의 제어 방법 및 제어 장치 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US10972020B2 (ko) |
| EP (1) | EP3632733B1 (ko) |
| JP (1) | JP6791377B2 (ko) |
| KR (1) | KR102131729B1 (ko) |
| CN (1) | CN110691710B (ko) |
| CA (1) | CA3065760C (ko) |
| MX (1) | MX377382B (ko) |
| RU (1) | RU2737640C1 (ko) |
| WO (1) | WO2018220805A1 (ko) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6984329B2 (ja) * | 2017-11-07 | 2021-12-17 | トヨタ自動車株式会社 | 自動車 |
| KR102463487B1 (ko) * | 2018-06-04 | 2022-11-03 | 현대자동차주식회사 | 친환경자동차의 구동 토크 지령 생성 장치 및 방법 |
| KR102529590B1 (ko) * | 2018-10-31 | 2023-05-08 | 현대자동차주식회사 | 하이브리드 자동차의 구동토크 지령 생성 장치 및 방법 |
| KR102673012B1 (ko) * | 2019-08-13 | 2024-06-07 | 현대자동차주식회사 | 차량의 구동계 백래시 판단 장치 및 방법 |
| WO2021075415A1 (ja) * | 2019-10-16 | 2021-04-22 | 三菱自動車工業株式会社 | 電動車両のモータ制御装置 |
| CN112092647B (zh) * | 2020-08-24 | 2021-11-05 | 奇瑞新能源汽车股份有限公司 | 车辆的控制方法与装置、存储介质、控制系统、车辆 |
| CN111993904A (zh) * | 2020-09-09 | 2020-11-27 | 北京罗克维尔斯科技有限公司 | 一种驱动控制方法、装置和电动车辆 |
| CN112009268B (zh) * | 2020-09-16 | 2021-10-22 | 北京车和家信息技术有限公司 | 一种车辆抖动控制方法及装置、驱动控制系统、车辆 |
| JP6977849B1 (ja) * | 2020-09-30 | 2021-12-08 | 株式会社明電舎 | 車両システムの振動抑制制御装置および振動抑制制御方法 |
| JP7334705B2 (ja) * | 2020-10-13 | 2023-08-29 | トヨタ自動車株式会社 | 電動車両の制御装置 |
| JP7420088B2 (ja) * | 2021-01-22 | 2024-01-23 | 株式会社デンソー | 制御装置、プログラム |
| DE102021111908B3 (de) | 2021-05-07 | 2022-09-01 | Bayerische Motoren Werke Aktiengesellschaft | Geräuschminderung bei einem Getriebe eines elektrischen Fahrzeugantriebs |
| IT202100018689A1 (it) * | 2021-07-15 | 2023-01-15 | Ferrari Spa | Procedimento ed apparato per controllare un motore elettrico |
| US12172706B2 (en) * | 2021-09-29 | 2024-12-24 | Nidec Corporation | Motor control device, motor control method, motor module, and electric power steering device |
| MX2024005897A (es) * | 2021-11-19 | 2024-05-31 | Nissan Motor | Metodo de control de motor electrico y dispositivo de control de motor electrico. |
| JP7487747B2 (ja) * | 2022-01-13 | 2024-05-21 | トヨタ自動車株式会社 | ハイブリッド式電動車両の制御装置 |
| JP7779330B2 (ja) * | 2022-01-18 | 2025-12-03 | 日産自動車株式会社 | 電動車両制御方法及び電動車両制御装置 |
| JP7779176B2 (ja) * | 2022-03-03 | 2025-12-03 | 日産自動車株式会社 | 電動車両の制御方法、及び電動車両の制御装置 |
| JP7803187B2 (ja) * | 2022-03-24 | 2026-01-21 | 日産自動車株式会社 | 電動車両制御方法、及び、電動車両制御装置 |
| KR20230173244A (ko) * | 2022-06-16 | 2023-12-27 | 현대자동차주식회사 | 차량의 구동력 제어 방법 |
| US12391125B2 (en) * | 2022-10-10 | 2025-08-19 | Ford Global Technologies, Llc | System and method to coordinate lash crossing transitions in multi-axle electrified drivetrains |
| JP7704131B2 (ja) * | 2022-11-29 | 2025-07-08 | トヨタ自動車株式会社 | 車両の制御装置 |
| WO2024154302A1 (ja) * | 2023-01-19 | 2024-07-25 | 日産自動車株式会社 | 電動車両の制御方法、及び、電動車両の制御装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011097794A (ja) * | 2009-10-31 | 2011-05-12 | Xiaolin Zhang | 協調制御装置 |
| KR20130032366A (ko) * | 2010-07-23 | 2013-04-01 | 닛산 지도우샤 가부시키가이샤 | 전동 차량의 제진 제어 장치 및 전동 차량의 제진 제어 방법 |
| WO2013157315A1 (ja) * | 2012-04-18 | 2013-10-24 | 日産自動車株式会社 | 電動車両の制御装置および電動車両の制御方法 |
| WO2015105077A1 (ja) * | 2014-01-10 | 2015-07-16 | 日産自動車株式会社 | 電動車両の制御装置および電動車両の制御方法 |
| WO2016120979A1 (ja) * | 2015-01-26 | 2016-08-04 | 日産自動車株式会社 | 電動車両の制御装置および電動車両の制御方法 |
| JP2017085850A (ja) * | 2015-10-30 | 2017-05-18 | 日産自動車株式会社 | 電動車両の制御方法、及び、制御装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3508742B2 (ja) * | 2001-06-18 | 2004-03-22 | 日産自動車株式会社 | 電動モータを用いた車両の制振制御装置 |
| RU2426660C2 (ru) * | 2009-01-15 | 2011-08-20 | Общество с ограниченной ответственностью "Центр технического сотрудничества" при МГТУ им. Н.Э. Баумана" | Способ управления многоприводной электрической трансмиссией многоосной колесной машины |
| JP5228996B2 (ja) * | 2009-02-27 | 2013-07-03 | 日産自動車株式会社 | 電動車両の制振制御装置 |
| JP6330820B2 (ja) * | 2013-12-02 | 2018-05-30 | 日産自動車株式会社 | 電動車両の制御装置および電動車両の制御方法 |
| US9809213B2 (en) * | 2014-01-14 | 2017-11-07 | Ford Global Technologies, Llc | Power split hybrid electric vehicle motor torque control using state estimation |
| JP6272178B2 (ja) * | 2014-08-06 | 2018-01-31 | 株式会社デンソー | 回転電機の制御装置 |
| WO2018020679A1 (ja) * | 2016-07-29 | 2018-02-01 | 日産自動車株式会社 | 車両の制御方法および制御装置 |
| CN110198874B (zh) * | 2017-01-24 | 2022-05-03 | 日产自动车株式会社 | 车辆的控制装置以及控制方法 |
-
2017
- 2017-06-01 JP JP2019521885A patent/JP6791377B2/ja active Active
- 2017-06-01 US US16/618,002 patent/US10972020B2/en active Active
- 2017-06-01 WO PCT/JP2017/020521 patent/WO2018220805A1/ja not_active Ceased
- 2017-06-01 CN CN201780091355.8A patent/CN110691710B/zh active Active
- 2017-06-01 EP EP17911644.7A patent/EP3632733B1/en active Active
- 2017-06-01 CA CA3065760A patent/CA3065760C/en active Active
- 2017-06-01 RU RU2019139672A patent/RU2737640C1/ru active
- 2017-06-01 KR KR1020197035855A patent/KR102131729B1/ko not_active Expired - Fee Related
- 2017-06-01 MX MX2019014246A patent/MX377382B/es active IP Right Grant
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011097794A (ja) * | 2009-10-31 | 2011-05-12 | Xiaolin Zhang | 協調制御装置 |
| KR20130032366A (ko) * | 2010-07-23 | 2013-04-01 | 닛산 지도우샤 가부시키가이샤 | 전동 차량의 제진 제어 장치 및 전동 차량의 제진 제어 방법 |
| WO2013157315A1 (ja) * | 2012-04-18 | 2013-10-24 | 日産自動車株式会社 | 電動車両の制御装置および電動車両の制御方法 |
| WO2015105077A1 (ja) * | 2014-01-10 | 2015-07-16 | 日産自動車株式会社 | 電動車両の制御装置および電動車両の制御方法 |
| WO2016120979A1 (ja) * | 2015-01-26 | 2016-08-04 | 日産自動車株式会社 | 電動車両の制御装置および電動車両の制御方法 |
| JP2017085850A (ja) * | 2015-10-30 | 2017-05-18 | 日産自動車株式会社 | 電動車両の制御方法、及び、制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110691710A (zh) | 2020-01-14 |
| EP3632733A1 (en) | 2020-04-08 |
| MX2019014246A (es) | 2020-02-03 |
| EP3632733B1 (en) | 2021-01-06 |
| RU2737640C1 (ru) | 2020-12-01 |
| CA3065760C (en) | 2020-11-03 |
| US10972020B2 (en) | 2021-04-06 |
| JPWO2018220805A1 (ja) | 2020-05-21 |
| CA3065760A1 (en) | 2018-12-06 |
| BR112019025363A2 (pt) | 2020-06-16 |
| US20200259431A1 (en) | 2020-08-13 |
| KR102131729B1 (ko) | 2020-07-08 |
| WO2018220805A1 (ja) | 2018-12-06 |
| MX377382B (es) | 2025-03-10 |
| JP6791377B2 (ja) | 2020-11-25 |
| CN110691710B (zh) | 2020-10-16 |
| EP3632733A4 (en) | 2020-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102131729B1 (ko) | 전동 차량의 제어 방법 및 제어 장치 | |
| JP6954062B2 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP6787410B2 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP5900609B2 (ja) | 電動車両の制御装置および電動車両の制御方法 | |
| JP5862436B2 (ja) | 電動車両の制御装置 | |
| JP6135775B2 (ja) | 電動車両の制御装置および電動車両の制御方法 | |
| JP7155674B2 (ja) | 電動車両の制御方法、及び、制御装置 | |
| CN109689422B (zh) | 车辆的控制方法和控制装置 | |
| JP6760401B2 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP6720714B2 (ja) | 電動車両の制御方法、及び電動車両の制御装置 | |
| JP6597174B2 (ja) | 電動車両の制御装置、及び、電動車両の制御方法 | |
| WO2014054657A1 (ja) | 電動車両の制御装置および電動車両の制御方法 | |
| JP2021175279A (ja) | 電動車両の制御方法、及び、電動車両の制御装置 | |
| JP2015195698A (ja) | 車両の制御装置 | |
| JP2013240258A (ja) | 電動車両の制振制御装置 | |
| JP2015023623A (ja) | 電動車両の制御装置および電動車両の制御方法 | |
| JP2017046419A (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP2023088683A (ja) | 電動車両の制御方法、及び、電動車両の制御装置 | |
| JP2016073161A (ja) | 電動車両の制御装置 | |
| BR112019025363B1 (pt) | Método de controle e dispositivo de controle para veículo elétrico |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| A302 | Request for accelerated examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PA0302 | Request for accelerated examination |
St.27 status event code: A-1-2-D10-D17-exm-PA0302 St.27 status event code: A-1-2-D10-D16-exm-PA0302 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20250703 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| H13 | Ip right lapsed |
Free format text: ST27 STATUS EVENT CODE: N-4-6-H10-H13-OTH-PC1903 (AS PROVIDED BY THE NATIONAL OFFICE); TERMINATION CATEGORY : DEFAULT_OF_REGISTRATION_FEE Effective date: 20250703 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20250703 |