KR20200007786A - 록 기구 부착 에어 척 - Google Patents
록 기구 부착 에어 척 Download PDFInfo
- Publication number
- KR20200007786A KR20200007786A KR1020197031573A KR20197031573A KR20200007786A KR 20200007786 A KR20200007786 A KR 20200007786A KR 1020197031573 A KR1020197031573 A KR 1020197031573A KR 20197031573 A KR20197031573 A KR 20197031573A KR 20200007786 A KR20200007786 A KR 20200007786A
- Authority
- KR
- South Korea
- Prior art keywords
- lock member
- cylinder tube
- fingers
- pair
- chuck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000006073 displacement reaction Methods 0.000 claims description 10
- 238000000034 method Methods 0.000 claims 8
- 238000012856 packing Methods 0.000 description 13
- 125000006850 spacer group Chemical group 0.000 description 10
- 210000000078 claw Anatomy 0.000 description 6
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 3
- 240000001973 Ficus microcarpa Species 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B31/00—Chucks; Expansion mandrels; Adaptations thereof for remote control
- B23B31/02—Chucks
- B23B31/10—Chucks characterised by the retaining or gripping devices or their immediate operating means
- B23B31/12—Chucks with simultaneously-acting jaws, whether or not also individually adjustable
- B23B31/1261—Chucks with simultaneously-acting jaws, whether or not also individually adjustable pivotally movable in a radial plane
- B23B31/1276—Chucks with simultaneously-acting jaws, whether or not also individually adjustable pivotally movable in a radial plane using fluid-pressure means to actuate the gripping means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B31/00—Chucks; Expansion mandrels; Adaptations thereof for remote control
- B23B31/02—Chucks
- B23B31/10—Chucks characterised by the retaining or gripping devices or their immediate operating means
- B23B31/12—Chucks with simultaneously-acting jaws, whether or not also individually adjustable
- B23B31/16—Chucks with simultaneously-acting jaws, whether or not also individually adjustable moving radially
- B23B31/16195—Jaws movement actuated by levers moved by a coaxial control rod
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B31/00—Chucks; Expansion mandrels; Adaptations thereof for remote control
- B23B31/02—Chucks
- B23B31/10—Chucks characterised by the retaining or gripping devices or their immediate operating means
- B23B31/12—Chucks with simultaneously-acting jaws, whether or not also individually adjustable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B31/00—Chucks; Expansion mandrels; Adaptations thereof for remote control
- B23B31/02—Chucks
- B23B31/10—Chucks characterised by the retaining or gripping devices or their immediate operating means
- B23B31/12—Chucks with simultaneously-acting jaws, whether or not also individually adjustable
- B23B31/16—Chucks with simultaneously-acting jaws, whether or not also individually adjustable moving radially
- B23B31/16195—Jaws movement actuated by levers moved by a coaxial control rod
- B23B31/16216—Jaws movement actuated by levers moved by a coaxial control rod using fluid-pressure means to actuate the gripping means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B31/00—Chucks; Expansion mandrels; Adaptations thereof for remote control
- B23B31/02—Chucks
- B23B31/24—Chucks characterised by features relating primarily to remote control of the gripping means
- B23B31/30—Chucks characterised by features relating primarily to remote control of the gripping means using fluid-pressure means in the chuck
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B1/00—Vices
- B25B1/06—Arrangements for positively actuating jaws
- B25B1/08—Arrangements for positively actuating jaws using cams
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B1/00—Vices
- B25B1/06—Arrangements for positively actuating jaws
- B25B1/18—Arrangements for positively actuating jaws motor driven, e.g. with fluid drive, with or without provision for manual actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B1/00—Vices
- B25B1/24—Details, e.g. jaws of special shape, slideways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/08—Arrangements for positively actuating jaws using cams
- B25B5/087—Arrangements for positively actuating jaws using cams actuated by a hydraulic or pneumatic piston
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/16—Details, e.g. jaws, jaw attachments
- B25B5/166—Slideways; Guiding and/or blocking means for jaws thereon
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0095—Gripping heads and other end effectors with an external support, i.e. a support which does not belong to the manipulator or the object to be gripped, e.g. for maintaining the gripping head in an accurate position, guiding it or preventing vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
- B25J15/0266—Gripping heads and other end effectors servo-actuated comprising parallel grippers actuated by articulated links
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
- B25J15/0266—Gripping heads and other end effectors servo-actuated comprising parallel grippers actuated by articulated links
- B25J15/0273—Gripping heads and other end effectors servo-actuated comprising parallel grippers actuated by articulated links comprising linear guide means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2231/00—Details of chucks, toolholder shanks or tool shanks
- B23B2231/26—Detection of clamping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2260/00—Details of constructional elements
- B23B2260/122—Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2270/00—Details of turning, boring or drilling machines, processes or tools not otherwise provided for
- B23B2270/02—Use of a particular power source
- B23B2270/027—Pneumatics
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Jigs For Machine Tools (AREA)
- Actuator (AREA)
Abstract
Description
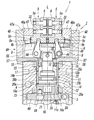
도 2는 도 1의 중앙 종단면도이다.
도 3은 도 2의 요부 확대도이다.
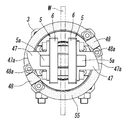
도 4는 도 1의 평면도이다.
도 5는 도 1의 분해 사시도이다.
도 6은 도 5의 요부 확대도이다.
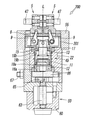
도 7은 한쌍의 핑거를 연 상태의 상기 에어 척의 중앙 종단면도이다.
도 8은 도 7의 평면도이다.
도 9는 한쌍의 핑거를 워크 파지 위치에 록킹한 상태에서의 상기 에어 척의 평면도이다.
도 10은 본 발명에 따른 에어 척의 제 2 실시형태를 나타내는 중앙 종단면도이며, 한쌍의 핑거를 닫은 상태의 도면이다.
도 11은 도 10의 평면도이다.
도 12는 제 2 실시형태의 에어 척의 분해 사시도이다.
도 13은 한쌍의 핑거를 연 상태의 제 2 실시형태의 중앙 종단면도이다.
도 14는 도 13의 평면도이다.
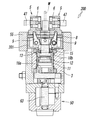
도 15는 한쌍의 핑거를 워크 파지 위치에 록킹한 상태의 제 2 실시형태의 중앙 종단면도이다.
도 16은 도 15의 평면도이다.
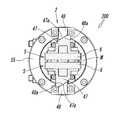
도 17은 에어 척의 제 3 실시형태를 나타내는 사시도이다.
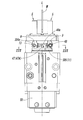
도 18은 도 17의 중앙 종단면도이다.
도 19는 제 3 실시형태의 에어 척의 분해 사시도이다.
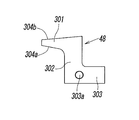
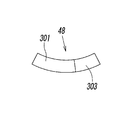
도 20은 제 2 록 부재의 측면도이다.
도 21은 제 2 록 부재의 평면도이다.
도 22는 한쌍의 핑거를 연 상태의 에어 척을, 레일 홀더를 생략해서 나타내는 측면도이다.
도 23은 한쌍의 핑거를 닫아서 워크를 파지한 상태의 에어 척을, 레일 홀더를 생략해서 나타내는 측면도이다.
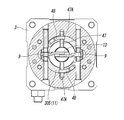
도 24는 도 23의 XXIV-XXIV를 따른 단면도이다.
도 25는 한쌍의 핑거를 워크 파지 위치에 록킹한 상태의 에어 척을, 레일 홀더를 생략해서 나타내는 측면도이다.
도 26은 도 25의 XXVI-XXVI를 따른 단면도이다.
도 27은 워크의 내경을 척한 핑거를 워크 파지 위치에 록킹한 상태의 에어 척을, 레일 홀더를 생략해서 나타내는 측면도이다.
3 : 척 바디 5 : 핑거
8 : 지지 레일 11 : 실린더 튜브
12 : 피스톤 13 : 로드
18a : 제 1 압력실 18b : 제 2 압력실
19a : 제 1 통과 구멍 19b : 제 2 통과 구멍
24 : 실린더 구멍 26a : 제 1 환상 유로
26b : 제 2 환상 유로 27a : 제 1 포트
27b : 제 2 포트 47 : 제 1 록 부재
47a : 제 1 쐐기면 48 : 제 2 록 부재
48a : 제 2 쐐기면 50 : 구동 장치
55 : 지지 부재 63 : 출력축
100, 200, 300 : 에어 척 W : 워크
L : 축선
Claims (9)
- 실린더 튜브의 내부의 피스톤을 압축 공기의 작용에 의해 동작시키고, 상기 피스톤에 연결된 로드의 진퇴 이동에 의해 한쌍의 핑거를 개폐시켜서 워크를 파지하는 척 기구와, 상기 한쌍의 핑거를 워크 파지 위치에 고정하는 록 기구를 갖고,
상기 록 기구는 상기 한쌍의 핑거의 개폐와 함께 변위하는 제 1 록 부재와, 상기 제 1 록 부재에 록킹함으로써 상기 한쌍의 핑거를 워크 파지 위치에 록킹하는 제 2 록 부재와, 상기 제 1 록 부재와 제 2 록 부재를 서로 고정하는 록 위치와 서로 이간하는 언록 위치로 상대적으로 변위시키는 구동 장치를 갖고,
상기 제 1 록 부재 및 제 2 록 부재는, 상기 로드의 축선을 중심으로 하는 상대적인 회전에 의해 상기 록 위치와 언록 위치로 변위하는 것을 특징으로 하는 록 기구 부착 에어 척. - 제 1 항에 있어서,
상기 실린더 튜브는 척 바디의 실린더 구멍 내에 축선을 중심으로 일정한 각도 범위를 왕복 회전 가능하도록 수용됨과 아울러 상기 구동 장치에 연결되고, 상기 제 1 록 부재 및 제 2 록 부재의 어느 한쪽이, 상기 구동 장치에 의해 상기 실린더 튜브를 통해서 상기 록 위치와 언록 위치로 구동되도록 구성된 것을 특징으로 하는 에어 척. - 제 2 항에 있어서,
상기 실린더 튜브의 외주와 상기 실린더 구멍의 내주 사이에는, 상기 척 바디에 형성된 제 1 포트에 연통하는 제 1 환상 유로와, 상기 척 바디에 형성된 제 2 포트에 연통하는 제 2 환상 유로가 상기 실린더 튜브의 외주를 둘러싸도록 형성되고,
상기 실린더 튜브의 측면에는, 상기 피스톤의 일측의 제 1 압력실과 상기 제 1 환상 유로를 연결하는 제 1 통과 구멍과, 상기 피스톤의 타측의 제 2 압력실과 상기 제 2 환상 유로를 연결하는 제 2 통과 구멍이 형성되어 있는 것을 특징으로 하는 에어 척. - 제 2 항에 있어서,
상기 구동 장치는 요동형 액츄에이터에 의해 형성되고, 상기 요동형 액츄에이터는 압축 공기의 작용에 의해 일정한 각도 범위를 왕복 회전하는 출력축을 갖고, 상기 출력축이 상기 실린더 튜브에 연결되어 있는 것을 특징으로 하는 에어 척. - 제 2 항에 있어서,
상기 한쌍의 핑거는 지지 레일에 개폐 가능하게 지지되고, 상기 제 1 록 부재는 상기 한쌍의 핑거에 각각 부착되며, 상기 제 2 록 부재는 상기 지지 레일의 주위에 설치된 지지 부재에 2개 부착되어 있고,
상기 지지 레일 및 지지 부재의 어느 한쪽이 상기 실린더 튜브에 연결되어 있고, 상기 실린더 튜브로 상기 지지 레일 또는 지지 부재를 왕복 회전시킴으로써, 상기 제 1 록 부재 및 제 2 록 부재가 서로 록킹 및 이간하는 위치로 상대적으로 변위하도록 구성된 것을 특징으로 하는 에어 척. - 제 5 항에 있어서,
상기 제 1 록 부재 및 제 2 록 부재는 서로 록킹하는 쐐기면을 갖고, 상기쐐기면은 상기 제 1 록 부재 또는 제 2 록 부재의 변위 방향인 원주 방향을 향해서, 상기 원주 방향과 교차하는 방향으로 경사져 있는 것을 특징으로 하는 에어 척. - 제 5 항에 있어서,
상기 지지 부재는 링 형상을 이루고 있고, 상기 지지 레일의 외주를 둘러싸도록 배치되고, 상기 지지 부재의 직경 방향의 서로 대향하는 위치에 상기 제 2 록 부재가 부착되어 있는 것을 특징으로 하는 에어 척. - 제 2 항에 있어서,
상기 제 1 록 부재는 상기 로드에 축선과 직교하는 방향에 설치된 샤프트 형상의 부재로 이루어지고, 상기 제 2 록 부재는 상기 제 1 록 부재에 록킹 가능한 갈고리형의 부재로 이루어지는 것을 특징으로 하는 에어 척. - 제 8 항에 있어서,
상기 로드와 제 1 록 부재는 상기 실린더 튜브가 회전해도 상기 실린더 튜브와 함께 회전하지 않도록 배치되고, 상기 제 2 록 부재는 상기 실린더 튜브에 상기 실린더 튜브와 함께 회전하도록 연결되어 있는 것을 특징으로 하는 에어 척.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017098339 | 2017-05-17 | ||
| JPJP-P-2017-098339 | 2017-05-17 | ||
| JP2017165513 | 2017-08-30 | ||
| JPJP-P-2017-165513 | 2017-08-30 | ||
| PCT/JP2018/006098 WO2018211763A1 (ja) | 2017-05-17 | 2018-02-21 | ロック機構付きエアチャック |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200007786A true KR20200007786A (ko) | 2020-01-22 |
| KR102414982B1 KR102414982B1 (ko) | 2022-06-30 |
Family
ID=64273715
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197031573A Active KR102414982B1 (ko) | 2017-05-17 | 2018-02-21 | 록 기구 부착 에어 척 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10953477B2 (ko) |
| JP (1) | JP7020619B2 (ko) |
| KR (1) | KR102414982B1 (ko) |
| CN (1) | CN110621454B (ko) |
| BR (1) | BR112019023915A2 (ko) |
| DE (1) | DE112018002553T5 (ko) |
| MX (1) | MX2019013591A (ko) |
| RU (1) | RU2751612C2 (ko) |
| TW (1) | TWI744492B (ko) |
| WO (1) | WO2018211763A1 (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6953336B2 (ja) * | 2018-03-22 | 2021-10-27 | 本田技研工業株式会社 | 連結具 |
| IT201900018275A1 (it) * | 2019-10-08 | 2021-04-08 | Admg S R L | Dispositivo morsa compatta |
| TWI734454B (zh) * | 2020-04-28 | 2021-07-21 | 鴻海精密工業股份有限公司 | 身份辨識裝置以及身份辨識方法 |
| CN111975810B (zh) * | 2020-09-11 | 2021-12-14 | 鹤壁职业技术学院 | 一种机械手指及机械手 |
| AU2020267180B1 (en) * | 2020-11-10 | 2021-06-24 | Gurtech (Pty) Ltd | An air chuck |
| JP7552395B2 (ja) * | 2021-02-03 | 2024-09-18 | Smc株式会社 | チャック装置 |
| JP7625951B2 (ja) * | 2021-04-13 | 2025-02-04 | Smc株式会社 | エアチャック |
| RU208230U1 (ru) * | 2021-07-07 | 2021-12-08 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Кубанский государственный аграрный университет им. И.Т. Трубилина" | Станочные тиски |
| CN113696211B (zh) * | 2021-09-13 | 2023-12-01 | 北京理工大学 | 一种空间机械臂软抓手 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07100785A (ja) | 1993-10-05 | 1995-04-18 | Ckd Corp | スイッチ付エアチャック |
| JPH10166290A (ja) | 1997-06-30 | 1998-06-23 | Ckd Corp | スイッチ付エアチャック |
| KR20010050582A (ko) * | 1999-10-12 | 2001-06-15 | 다까다 요시유끼 | 완충기능을 가진 전동핸드 |
| KR20050078977A (ko) * | 2004-02-03 | 2005-08-08 | 에스엠시 가부시키가이샤 | 파지부재 스트로크 가변의 공기압 구동 척 |
| JP2009214204A (ja) * | 2008-03-07 | 2009-09-24 | Ckd Corp | ロボットハンド |
| JP2010069570A (ja) | 2008-09-18 | 2010-04-02 | Denso Corp | エアチャック装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5347732Y2 (ko) | 1973-04-06 | 1978-11-15 | ||
| US4530508A (en) * | 1982-07-14 | 1985-07-23 | Ferraro Thomas A | Jaw locking means for lathe chucks |
| EP0208827B1 (de) * | 1984-08-04 | 1990-06-06 | Robert Bosch Gmbh | Greifvorrichtung |
| JPH0616685Y2 (ja) * | 1990-04-20 | 1994-05-02 | 有限会社エリー工業 | 部品取扱い装置における部品掴持具 |
| RU2096167C1 (ru) * | 1996-05-28 | 1997-11-20 | Московское авиационное производственное объединение "МИГ" | Схват промышленного робота |
| US6588816B1 (en) * | 1996-10-07 | 2003-07-08 | Phd, Inc. | Modular stamped parts transfer gripper |
| JP4126333B2 (ja) | 1997-02-12 | 2008-07-30 | Smc株式会社 | リニアガイド式エアチャック |
| JP3263373B2 (ja) * | 1998-12-18 | 2002-03-04 | エービービー株式会社 | 自動塗装装置 |
| JP2000343473A (ja) * | 1999-06-03 | 2000-12-12 | Smc Corp | 平行開閉チャック |
| RU32423U1 (ru) * | 2003-05-19 | 2003-09-20 | Московский государственный открытый университет | Схват промышленного робота |
| JP2008272867A (ja) | 2007-04-27 | 2008-11-13 | Kondo Seisakusho:Kk | ロック機構付き平行ハンド |
| JP4737456B2 (ja) * | 2007-11-22 | 2011-08-03 | Smc株式会社 | グリッパ機構 |
| US20130249156A1 (en) * | 2010-12-02 | 2013-09-26 | Kosmek Ltd. | Clamp apparatus |
| DE102011115366A1 (de) | 2011-10-10 | 2013-04-11 | Günther Zimmer | Greifvorrichtung mit Haltevorrichtung |
| CN203804634U (zh) * | 2014-04-19 | 2014-09-03 | 建湖县海盛机械制造有限公司 | 一种楔推式双头车双向主轴夹头 |
| JP6227578B2 (ja) | 2015-02-25 | 2017-11-08 | Ckd株式会社 | 把持装置 |
| JP6628076B2 (ja) * | 2015-06-30 | 2020-01-08 | Smc株式会社 | チャック装置 |
-
2018
- 2018-02-21 KR KR1020197031573A patent/KR102414982B1/ko active Active
- 2018-02-21 US US16/613,340 patent/US10953477B2/en active Active
- 2018-02-21 JP JP2019519064A patent/JP7020619B2/ja active Active
- 2018-02-21 BR BR112019023915-4A patent/BR112019023915A2/pt not_active IP Right Cessation
- 2018-02-21 WO PCT/JP2018/006098 patent/WO2018211763A1/ja not_active Ceased
- 2018-02-21 DE DE112018002553.5T patent/DE112018002553T5/de active Pending
- 2018-02-21 CN CN201880032184.6A patent/CN110621454B/zh active Active
- 2018-02-21 RU RU2019141618A patent/RU2751612C2/ru active
- 2018-02-21 MX MX2019013591A patent/MX2019013591A/es unknown
- 2018-02-27 TW TW107106504A patent/TWI744492B/zh active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07100785A (ja) | 1993-10-05 | 1995-04-18 | Ckd Corp | スイッチ付エアチャック |
| JPH10166290A (ja) | 1997-06-30 | 1998-06-23 | Ckd Corp | スイッチ付エアチャック |
| KR20010050582A (ko) * | 1999-10-12 | 2001-06-15 | 다까다 요시유끼 | 완충기능을 가진 전동핸드 |
| KR20050078977A (ko) * | 2004-02-03 | 2005-08-08 | 에스엠시 가부시키가이샤 | 파지부재 스트로크 가변의 공기압 구동 척 |
| JP2009214204A (ja) * | 2008-03-07 | 2009-09-24 | Ckd Corp | ロボットハンド |
| JP2010069570A (ja) | 2008-09-18 | 2010-04-02 | Denso Corp | エアチャック装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112018002553T5 (de) | 2020-01-30 |
| KR102414982B1 (ko) | 2022-06-30 |
| TW201900364A (zh) | 2019-01-01 |
| JPWO2018211763A1 (ja) | 2020-03-19 |
| US20200130069A1 (en) | 2020-04-30 |
| CN110621454B (zh) | 2023-05-16 |
| RU2751612C2 (ru) | 2021-07-15 |
| CN110621454A (zh) | 2019-12-27 |
| JP7020619B2 (ja) | 2022-02-16 |
| MX2019013591A (es) | 2020-01-13 |
| BR112019023915A2 (pt) | 2020-06-02 |
| WO2018211763A1 (ja) | 2018-11-22 |
| TWI744492B (zh) | 2021-11-01 |
| US10953477B2 (en) | 2021-03-23 |
| RU2019141618A (ru) | 2021-06-17 |
| RU2019141618A3 (ko) | 2021-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200007786A (ko) | 록 기구 부착 에어 척 | |
| KR101643374B1 (ko) | 클램프 장치 | |
| KR100918497B1 (ko) | 척장치 | |
| US7182326B2 (en) | Pin clamp | |
| CN102083585B (zh) | 五面加工用附件单元 | |
| CN101500747A (zh) | 夹紧装置 | |
| JP3760429B2 (ja) | 2駆動系流体圧チャック | |
| WO2000027596A1 (en) | Tool connecting device for robot hand | |
| EP3887090B1 (en) | Tool-holder unit of a machine for machining block or slab materials, machine including such unit and method for machining block or slab materials | |
| US6491304B2 (en) | Cylinder having guide | |
| GB2464796A (en) | Self-tightening drill chuck | |
| CN211540260U (zh) | 卧式凸轮交换台用锥座 | |
| US6915868B1 (en) | Elevator apparatus and method for running well bore tubing | |
| CN115818427B (zh) | 吊装内孔带环形凹槽工件的工具 | |
| US20120325498A1 (en) | Floating spider | |
| US20180207783A1 (en) | Portable Power Tool | |
| US6932333B2 (en) | Swing clamp | |
| JP2009039823A (ja) | 自動工具交換装置のロック機構 | |
| KR20220130445A (ko) | 자동 공구 교환 장치 | |
| US11572746B2 (en) | Rotary gripping apparatus for a power tong | |
| KR100563613B1 (ko) | 스트록어져스터를 갖는 에어척 | |
| CN110421522B (zh) | 挺柱的拆装工具 | |
| CN107921548A (zh) | 用于支撑和/或对中工件的尾架设备 | |
| CA3153823C (en) | A rotary gripping apparatus for a power tong | |
| CN115161599B (zh) | 一种真空腔体开腔结构及开腔方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20191025 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210210 Comment text: Request for Examination of Application |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20220415 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220627 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220628 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |