KR20200020200A - 다중센서 융합을 통한 실내 3차원 위치 추정 시스템 및 그 추정 방법 - Google Patents
다중센서 융합을 통한 실내 3차원 위치 추정 시스템 및 그 추정 방법 Download PDFInfo
- Publication number
- KR20200020200A KR20200020200A KR1020180095616A KR20180095616A KR20200020200A KR 20200020200 A KR20200020200 A KR 20200020200A KR 1020180095616 A KR1020180095616 A KR 1020180095616A KR 20180095616 A KR20180095616 A KR 20180095616A KR 20200020200 A KR20200020200 A KR 20200020200A
- Authority
- KR
- South Korea
- Prior art keywords
- information
- indoor
- aerial vehicle
- unmanned aerial
- sensing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/49—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an inertial position system, e.g. loosely-coupled
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D47/00—Equipment not otherwise provided for
- B64D47/08—Arrangements of cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/02—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/485—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an optical system or imaging system
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/10—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS]
- B64U2201/104—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS] using satellite radio beacon positioning systems, e.g. GPS
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Theoretical Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Electromagnetism (AREA)
- Mathematical Physics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
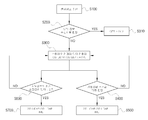
도 2는 본 발명의 일 실시예에 따른 다중센서 융합을 통한 실내 3차원 위치 추정 방법을 나타낸 순서도이다.
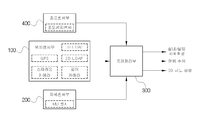
200 : 자세센서부
300 : 통합처리부
400 : 조도센서부
Claims (9)
- 무인비행체에 구비되어, 상기 무인비행체의 위치정보를 센싱하는 위치센서부(100);
상기 무인비행체에 구비되어, 상기 무인비행체의 자세정보를 센싱하는 자세센서부(200); 및
상기 무인비행체와 네트워크 연결되어, 상기 위치센서부(100) 및 자세센서부(200)로부터 전달받은 상기 위치정보와 자세정보들을 기설정된 알고리즘에 적용하여, 상기 무인비행체의 자기위치 측정정보(Odometry)를 생성하는 통합처리부(300);
를 포함하여 구성되는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 시스템.
- 제 1항에 있어서,
상기 위치센서부(100)는
GPS, 스테레오 카메라(stereo camera), 깊이 카메라(depth camera), 2D LiDAR(Light Detection And Ranging) 및 3D LiDAR 중 적어도 하나 이상 포함하여 구성되는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 시스템.
- 제 2항에 있어서,
상기 자세센서부(200)는
IMU 센서(Inertial Measurement Units)를 포함하여 구성되는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 시스템.
- 제 3항에 있어서,
상기 다중센서 융합을 통한 실내 3차원 위치 추정 시스템은
상기 무인비행체에 구비되어, 상기 무인비행체의 주변 조도정보를 센싱하는 조도감지센서를 포함하는 조도센서부(400);
를 더 포함하여 구성되는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 시스템.
- 제 4항에 있어서,
상기 통합처리부(300)는
상기 조도센서부(400)로부터 전달받은 상기 무인비행체의 주변 조도정보가 기설정된 조도값 이하일 경우, 2D LiDAR 또는 3D LiDAR를 통해서 전달되는 상기 위치정보를 이용하는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 시스템.
- 제 4항에 있어서,
상기 통합처리부(300)는
연속되는 시간에 따라, 제1 센싱데이터에 의한 상기 주변 조도정보와 상기 제1 센싱데이터 이후에 입력되는 제2 센싱데이터에 의한 상기 주변 조도정보의 차가 소정범위를 벗어날 경우, 2D LiDAR 또는 3D LiDAR를 통해서 전달되는 상기 위치정보를 이용하는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 시스템.
- 무인비행체와 네트워크 연결되어 기설정된 알고리즘에 적용하여 상기 무인비행체의 자기위치 측정정보를 생성하는 통합처리부에서, 상기 무인비행체에 구비된 센서들로부터 상기 기설정된 알고리즘에 적용되는 센싱정보들을 전달받는 센싱단계(S100);
통합처리부에서, 상기 센싱단계(S100)에 의해 전달받은 상기 센싱정보들 중 GPS 정보의 수신여부를 판단하는 실내외 판단단계(S200);
통합처리부에서, 상기 실내외 판단단계(S200)에 의해 GPS 정보가 수신되지 않을 경우, 상기 무인비행체에 구비되어 상기 무인비행체의 위치정보를 센싱하는 스테레오 카메라(stereo camera), 깊이 카메라(depth camera), 2D LiDAR(Light Detection And Ranging) 및 3D LiDAR 중 적어도 하나 이상으로부터 상기 위치정보를 전달받고, 상기 무인비행체에 구비되어 상기 무인비행체의 자세정보를 센싱하는 IMU 센서(Inertial Measurement Units)로부터 상기 자세정보를 전달받아 상기 자기위치 측정정보를 생성하는 실내 추정단계(S300);
통합처리부에서, 상기 센싱단계(S100)에 의해 전달받은 상기 센싱정보들 중 주변 조도정보가 기설정된 조도값 이하인지 판단하는 제1 조도판단단계(S400); 및
통합처리부에서, 상기 제1 조도판단단계(S400)의 판단 결과에 따라, 상기 주변 조도정보가 기설정된 조도값 이하일 경우, 2D LiDAR 또는 3D LiDAR로부터 전달받은 상기 위치정보와 상기 IMU 센서로부터 상기 자세정보를 전달받아 상기 자기위치 측정정보를 생성하는 저조도 추정단계(S500);
를 포함하여 구성되는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 방법.
- 제 7항에 있어서,
상기 다중센서 융합을 통한 실내 3차원 위치 추정 방법은
통합처리부에서, 연속되는 시간에 따라, 상기 센싱단계(S100)에 의해 전달받은 제1 센싱정보들에 의한 상기 주변 조도정보와 상기 제1 센싱정보 이후에 전달받은 제2 센싱정보들에 의한 상기 주변 조도정보의 차가 소정범위를 벗어나는지 판단하는 제2 조도판단단계(S600); 및
통합처리부에서, 상기 제2 조도판단단계(S600)의 판단 결과에 따라, 상기 주변조도정보의 차가 소정범위를 벗어날 경우, 2D LiDAR 또는 3D LiDAR로부터 전달받은 상기 위치정보와 상기 IMU 센서로부터 상기 자세정보를 전달받아 상기 자기위치 측정정보를 생성하는 급변조도 추정단계(S700);
를 더 포함하여 구성되는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 방법.
- 제 7항에 있어서,
상기 실내외 판단단계(S200)에 의해 GPS 정보가 수신될 경우, 상기 GPS 정보로부터 전달받은 상기 위치정보와 상기 IMU 센서로부터 상기 자세정보를 전달받아 상기 자기위치 측정정보를 생성하는 실외 추정단계(S310);
를 더 포함하여 이루어지는 것을 특징으로 하는 다중센서 융합을 통한 실내 3차원 위치 추정 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180095616A KR102104031B1 (ko) | 2018-08-16 | 2018-08-16 | 다중센서 융합을 통한 실내 3차원 위치 추정 시스템 및 그 추정 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180095616A KR102104031B1 (ko) | 2018-08-16 | 2018-08-16 | 다중센서 융합을 통한 실내 3차원 위치 추정 시스템 및 그 추정 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200020200A true KR20200020200A (ko) | 2020-02-26 |
| KR102104031B1 KR102104031B1 (ko) | 2020-04-24 |
Family
ID=69637838
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180095616A Active KR102104031B1 (ko) | 2018-08-16 | 2018-08-16 | 다중센서 융합을 통한 실내 3차원 위치 추정 시스템 및 그 추정 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102104031B1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114384923A (zh) * | 2020-10-22 | 2022-04-22 | 福建江夏学院 | 一种x对称结构测量无人机姿态角的方法 |
| KR102446517B1 (ko) * | 2021-06-21 | 2022-09-23 | 한성웰텍(주) | 실내환경 및 실외환경에서 경로주행이 가능한 무인 운반차 |
| KR20230141037A (ko) * | 2022-03-31 | 2023-10-10 | 주식회사 휴인스 | 인공지능 기반의 실내 자율비행이 가능한 드론 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220014495A (ko) | 2020-07-29 | 2022-02-07 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| KR20220066690A (ko) | 2020-11-16 | 2022-05-24 | 삼성전자주식회사 | 로봇 및 그 제어 방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100997084B1 (ko) | 2010-06-22 | 2010-11-29 | (주)올포랜드 | 지하시설물의 실시간 정보제공 방법 및 시스템, 이를 위한 서버 및 그 정보제공방법, 기록매체 |
| JP2018055695A (ja) * | 2017-10-26 | 2018-04-05 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | ある環境内で無人航空機を制御する方法、ある環境のマップを生成する方法、システム、プログラムおよび通信端末 |
| US20180150718A1 (en) * | 2016-11-30 | 2018-05-31 | Gopro, Inc. | Vision-based navigation system |
-
2018
- 2018-08-16 KR KR1020180095616A patent/KR102104031B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100997084B1 (ko) | 2010-06-22 | 2010-11-29 | (주)올포랜드 | 지하시설물의 실시간 정보제공 방법 및 시스템, 이를 위한 서버 및 그 정보제공방법, 기록매체 |
| US20180150718A1 (en) * | 2016-11-30 | 2018-05-31 | Gopro, Inc. | Vision-based navigation system |
| JP2018055695A (ja) * | 2017-10-26 | 2018-04-05 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | ある環境内で無人航空機を制御する方法、ある環境のマップを生成する方法、システム、プログラムおよび通信端末 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114384923A (zh) * | 2020-10-22 | 2022-04-22 | 福建江夏学院 | 一种x对称结构测量无人机姿态角的方法 |
| CN114384923B (zh) * | 2020-10-22 | 2023-05-23 | 福建江夏学院 | 一种x对称结构测量无人机姿态角的方法 |
| KR102446517B1 (ko) * | 2021-06-21 | 2022-09-23 | 한성웰텍(주) | 실내환경 및 실외환경에서 경로주행이 가능한 무인 운반차 |
| KR20230141037A (ko) * | 2022-03-31 | 2023-10-10 | 주식회사 휴인스 | 인공지능 기반의 실내 자율비행이 가능한 드론 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102104031B1 (ko) | 2020-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102396675B1 (ko) | 라이다 센서를 이용한 지하광산 자율주행 로봇의 위치추정 및 3d 갱도 맵핑 시스템과 그 방법 | |
| US10788830B2 (en) | Systems and methods for determining a vehicle position | |
| KR102463176B1 (ko) | 위치 추정 장치 및 방법 | |
| US11866167B2 (en) | Method and algorithm for flight, movement, autonomy, in GPS, communication, degraded, denied, obstructed non optimal environment | |
| KR102104031B1 (ko) | 다중센서 융합을 통한 실내 3차원 위치 추정 시스템 및 그 추정 방법 | |
| Huh et al. | Integrated navigation system using camera and gimbaled laser scanner for indoor and outdoor autonomous flight of UAVs | |
| US9378558B2 (en) | Self-position and self-orientation based on externally received position information, sensor data, and markers | |
| US9896202B2 (en) | Systems and methods for reliable relative navigation and autonomous following between unmanned aerial vehicle and a target object | |
| JP6395362B2 (ja) | 分散された位置の識別 | |
| US8315794B1 (en) | Method and system for GPS-denied navigation of unmanned aerial vehicles | |
| Nieuwenhuisen et al. | Multimodal obstacle detection and collision avoidance for micro aerial vehicles | |
| KR102722952B1 (ko) | 인공지능 기반의 실내 자율비행이 가능한 드론 | |
| Ruotsalainen et al. | Improving computer vision-based perception for collaborative indoor navigation | |
| EP2523062B1 (en) | Time phased imagery for an artificial point of view | |
| CN108627864A (zh) | 基于汽车钥匙的定位方法及系统、无人驾驶汽车系统 | |
| JP2022015978A (ja) | 無人航空機の制御方法、無人航空機、および、無人航空機の制御プログラム | |
| KR101764222B1 (ko) | 고정밀 측위 시스템 및 방법 | |
| EP3271686B1 (en) | Position determining unit and a method for determining a position of a land or sea based object | |
| US7792330B1 (en) | System and method for determining range in response to image data | |
| JP2019148456A (ja) | 算出装置、自己位置算出方法、およびプログラム | |
| US10830906B2 (en) | Method of adaptive weighting adjustment positioning | |
| JPWO2019087778A1 (ja) | 移動体の姿勢センサ装置 | |
| Praschl et al. | Enabling outdoor MR capabilities for head mounted displays: a case study | |
| CA3107907C (en) | System for object tracking in physical space with aligned reference frames | |
| EP4166989A1 (en) | Methods and systems for determining a position and an acceleration of a vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180816 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200120 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20200414 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20200417 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20200420 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20230313 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240313 Start annual number: 5 End annual number: 5 |