KR20200022034A - 토크 검출기 및 토크 검출기의 제조 방법 - Google Patents
토크 검출기 및 토크 검출기의 제조 방법 Download PDFInfo
- Publication number
- KR20200022034A KR20200022034A KR1020207004008A KR20207004008A KR20200022034A KR 20200022034 A KR20200022034 A KR 20200022034A KR 1020207004008 A KR1020207004008 A KR 1020207004008A KR 20207004008 A KR20207004008 A KR 20207004008A KR 20200022034 A KR20200022034 A KR 20200022034A
- Authority
- KR
- South Korea
- Prior art keywords
- silicon layer
- torque detector
- layer
- gauge
- resistance gauge
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/14—Rotary-transmission dynamometers wherein the torque-transmitting element is other than a torsionally-flexible shaft
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Pressure Sensors (AREA)
- Measurement Of Force In General (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
Description
도 2a는 본 발명의 실시형태 1에 있어서의 저항 게이지의 배치예를 도시한 상면도이고, 도 2b는 도 2a에 도시된 저항 게이지에 의해 구성되는 풀 브리지 회로의 구성예를 도시한 도면이다.
도 3은 본 발명의 실시형태 1에 있어서의 변형 센서의 제조 방법의 일례를 도시한 플로우차트이다.
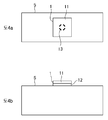
도 4a, 도 4b는 본 발명의 실시형태 1에 있어서의 변형 센서가 회전축체에 부착된 상태를 도시한 도면이며, 도 4a는 상면도이고, 도 4b는 측면도이다.
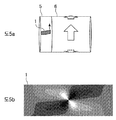
도 5a, 도 5b는 토크 검출기의 기본 동작 원리를 설명하는 도면이며, 도 5a는 회전축체에 가해진 토크를 도시한 측면도이고, 도 5b는 도 5a에 도시된 토크에 의해 변형 센서에 발생한 응력 분포의 일례를 도시한 도면이다.
도 6a 내지 도 6c는 본 발명의 실시형태 1에 있어서의 저항 게이지의 다른 배치예를 도시한 상면도이다.
도 7a는 본 발명의 실시형태 1에 있어서의 저항 게이지의 다른 배치예를 도시한 상면도이고, 도 7b, 도 7c는 도 7a에 도시된 저항 게이지를 갖는 변형 센서가 회전축체에 부착된 상태를 도시한 상면도 및 측면도이다.
도 8a는 본 발명의 실시형태 1에 있어서의 저항 게이지의 다른 배치예를 도시한 상면도이고, 도 8b는 도 8a에 도시된 저항 게이지에 의해 구성되는 하프 브리지 회로의 구성예를 도시한 도면이다.
도 9a 내지 도 9c는 본 발명의 실시형태 1에 있어서의 실리콘층의 다른 구성예를 도시한 이면도이다.
도 10은 본 발명의 실시형태 1에 있어서의 실리콘층의 다른 구성예를 도시한 이면도이다.
도 11a 내지 도 11c는 본 발명의 실시형태 1에 있어서의 변형 센서의 사이즈의 일례를 도시한 상면도이고, 도 11d는 변형 센서의 사이즈에 의한 감도의 차이를 도시한 도면이다.
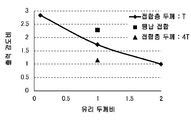
도 12는 본 발명의 실시형태 1에 있어서의 절연층의 두께 및 접합층의 두께에 의한 감도의 차이를 도시한 도면이다.
도 13a, 도 13b는 본 발명의 실시형태 1에 있어서의 실리콘층의 상면도 및 측단면도를 도시한 도면이고, 도 13c는 박육부의 사이즈 및 두께에 의한 감도의 차이를 도시한 도면이다.
6: 구동계 11: 실리콘층(기판층)
12: 절연층 13: 저항 게이지(확산 저항)
111: 홈부 112: 박육부
113: 연통홈부
Claims (9)
- 외력에 따라 변형이 발생하는 기판층과,
상기 기판층에 형성된 저항 게이지와,
상기 기판층의 일면에 형성되고, 상기 기판층의 상기 저항 게이지가 형성된 개소를 박육부(薄肉部)로 되게 하는 홈부, 그리고
상기 기판층의 일면에 접합된 절연층
을 구비한 토크 검출기. - 제1항에 있어서, 상기 기판층은 실리콘층인 것을 특징으로 하는 토크 검출기.
- 제2항에 있어서, 상기 실리콘층은, 표면의 결정 방위가 (100)인 것을 특징으로 하는 토크 검출기.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 저항 게이지는, 상기 기판층에 성막(成膜)됨으로써 형성된 것을 특징으로 하는 토크 검출기.
- 제2항 또는 제3항에 있어서, 상기 저항 게이지는, 상기 실리콘층의 <110> 방향에 형성된 것을 특징으로 하는 토크 검출기.
- 제5항에 있어서, 상기 저항 게이지는, 상기 실리콘층의 변 방향에 대해 비스듬한 방향으로 형성된 것을 특징으로 하는 토크 검출기.
- 제5항에 있어서, 상기 저항 게이지는, 상기 실리콘층의 변 방향을 따라 형성된 것을 특징으로 하는 토크 검출기.
- 제2항, 제3항 또는 제5항 내지 제7항 중 어느 한 항에 있어서, 상기 실리콘층의 일면에 형성되고, 상기 홈부를 상기 실리콘층의 측면과 연통(連通)시키는 연통홈부를 구비한 것을 특징으로 하는 토크 검출기.
- 외력에 따라 변형이 발생하는 기판층에 저항 게이지를 형성하는 단계와,
상기 기판층의 일면에, 상기 기판층의 상기 저항 게이지가 형성된 개소를 박육부로 되게 하는 홈부를 형성하는 단계, 그리고
상기 기판층의 일면과 절연층을 접합하는 단계
를 포함하는 토크 검출기의 제조 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017156383A JP6820102B2 (ja) | 2017-08-14 | 2017-08-14 | トルク検出器及びトルク検出器の製造方法 |
| JPJP-P-2017-156383 | 2017-08-14 | ||
| PCT/JP2018/025896 WO2019035291A1 (ja) | 2017-08-14 | 2018-07-09 | トルク検出器及びトルク検出器の製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200022034A true KR20200022034A (ko) | 2020-03-02 |
| KR102332882B1 KR102332882B1 (ko) | 2021-12-01 |
Family
ID=65362308
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207004008A Active KR102332882B1 (ko) | 2017-08-14 | 2018-07-09 | 토크 검출기 및 토크 검출기의 제조 방법 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6820102B2 (ko) |
| KR (1) | KR102332882B1 (ko) |
| CN (1) | CN110998265B (ko) |
| WO (1) | WO2019035291A1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023106236A1 (ja) * | 2021-12-08 | 2023-06-15 | ミネベアミツミ株式会社 | 歪みゲージモジュール |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61223625A (ja) * | 1985-03-29 | 1986-10-04 | Nec Corp | センサ |
| JPH0846218A (ja) * | 1994-08-04 | 1996-02-16 | Mitsubishi Electric Corp | 半導体圧力検出装置 |
| JP2016109568A (ja) | 2014-12-08 | 2016-06-20 | パナソニックIpマネジメント株式会社 | トルクセンサ |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8408502D0 (en) * | 1984-04-03 | 1984-05-16 | Trw Probe Electronics Co Ltd | Torque sensing apparatus |
| JPS63280476A (ja) * | 1987-05-12 | 1988-11-17 | Sumitomo Metal Ind Ltd | 歪測定方法 |
| JPH01189971A (ja) * | 1988-01-26 | 1989-07-31 | Toshiba Corp | トルクセンサ |
| CN88201030U (zh) * | 1988-01-28 | 1988-09-07 | 复旦大学 | 矩形双岛硅膜结构过压保护型压力传感器 |
| JPH08274350A (ja) * | 1995-03-29 | 1996-10-18 | Yokogawa Electric Corp | 半導体圧力センサ及びその製造方法 |
| JPH0989692A (ja) * | 1995-09-25 | 1997-04-04 | Nissan Motor Co Ltd | ステアリングトルクセンサ |
| AUPP098497A0 (en) * | 1997-12-17 | 1998-01-15 | Bishop Innovation Pty Limited | Transmission path torque transducer |
| JP2001264198A (ja) * | 2000-03-16 | 2001-09-26 | Olympus Optical Co Ltd | 多軸力覚センサ及び力覚センサの製造方法 |
| AU2003211715A1 (en) * | 2002-03-07 | 2003-09-16 | K-Tech Devices Corp. | Stress sensor |
| KR20030077754A (ko) * | 2002-03-27 | 2003-10-04 | 삼성전기주식회사 | 마이크로 관성센서 및 그 제조 방법 |
| CN2636217Y (zh) * | 2003-04-29 | 2004-08-25 | 周国玉 | 电阻应变压轴式土压力盒 |
| TW200621442A (en) * | 2004-12-29 | 2006-07-01 | Ind Tech Res Inst | A torque measurement device for torque wrench by using indirect sensing structure |
| JP2006220574A (ja) * | 2005-02-14 | 2006-08-24 | Hitachi Ltd | 回転体力学量測定装置および回転体力学量計測システム |
| CN101256279B (zh) * | 2005-02-23 | 2014-04-02 | 皮克斯特隆尼斯有限公司 | 显示方法和装置 |
| JP4566227B2 (ja) * | 2007-09-25 | 2010-10-20 | 株式会社日立製作所 | 半導体歪センサーおよび半導体歪センサーの取付け方法 |
| CN101241030A (zh) * | 2008-03-10 | 2008-08-13 | 清华大学 | Mos力敏传感器 |
| JP2010197219A (ja) * | 2009-02-25 | 2010-09-09 | Hitachi Ltd | センサデバイスおよび計測システム |
| US8839683B2 (en) * | 2009-05-01 | 2014-09-23 | The University Of Western Ontario | Photonic crystal pressure sensor |
| JP2011220927A (ja) * | 2010-04-13 | 2011-11-04 | Yamatake Corp | 圧力センサ |
| CN101825505B (zh) * | 2010-04-22 | 2015-02-18 | 无锡市纳微电子有限公司 | 一种mems压力敏感芯片及其制作方法 |
| CN202886037U (zh) * | 2012-10-12 | 2013-04-17 | 西北工业大学 | 一种扭矩传感器 |
| JP5975970B2 (ja) * | 2013-11-20 | 2016-08-23 | 日立オートモティブシステムズ株式会社 | 圧力センサ |
| US10032936B2 (en) * | 2015-05-29 | 2018-07-24 | Seiko Epson Corporation | Method for manufacturing resistive element, method for manufacturing pressure sensor element, pressure sensor element, pressure sensor, altimeter, electronic apparatus, and moving object |
| US9739673B2 (en) * | 2015-08-05 | 2017-08-22 | Sensata Technologies, Inc. | Sensor substrate |
-
2017
- 2017-08-14 JP JP2017156383A patent/JP6820102B2/ja active Active
-
2018
- 2018-07-09 CN CN201880052321.2A patent/CN110998265B/zh active Active
- 2018-07-09 WO PCT/JP2018/025896 patent/WO2019035291A1/ja not_active Ceased
- 2018-07-09 KR KR1020207004008A patent/KR102332882B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61223625A (ja) * | 1985-03-29 | 1986-10-04 | Nec Corp | センサ |
| JPH0846218A (ja) * | 1994-08-04 | 1996-02-16 | Mitsubishi Electric Corp | 半導体圧力検出装置 |
| JP2016109568A (ja) | 2014-12-08 | 2016-06-20 | パナソニックIpマネジメント株式会社 | トルクセンサ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6820102B2 (ja) | 2021-01-27 |
| WO2019035291A1 (ja) | 2019-02-21 |
| CN110998265B (zh) | 2021-12-21 |
| JP2019035638A (ja) | 2019-03-07 |
| CN110998265A (zh) | 2020-04-10 |
| KR102332882B1 (ko) | 2021-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3580539B1 (en) | Integrated digital force sensor | |
| KR102332884B1 (ko) | 토크 검출기 | |
| EP3176557A1 (en) | Pressure sensor die with protection against over pressure for high over pressure to operating span ratios | |
| US20190242772A1 (en) | Mems pressure sensor with multiple sensitivity and small dimensions | |
| US20080098820A1 (en) | Force Measuring Device, Especially Pressure Gauge, And Associated Production Method | |
| KR102333526B1 (ko) | 토크 검출기 및 토크 검출기의 제조 방법 | |
| KR102332882B1 (ko) | 토크 검출기 및 토크 검출기의 제조 방법 | |
| KR102333525B1 (ko) | 토크 검출기 | |
| JP2020067295A (ja) | アクチュエーティングユニット | |
| WO2019069620A1 (ja) | トルク検出装置 | |
| JP6820817B2 (ja) | トルク検出装置 | |
| JPH0526983Y2 (ko) | ||
| WO2019069683A1 (ja) | トルク検出器 | |
| JP4715503B2 (ja) | センサモジュールの製造方法 | |
| JPS6312930A (ja) | 力検出素子 | |
| JP2008008672A (ja) | 加速度センサ | |
| JP2019045207A (ja) | 圧力センサ | |
| JPH0389131A (ja) | 圧覚センサ及びその製造方法 | |
| JP2006038789A (ja) | 圧力センサ | |
| JPS6272146A (ja) | 半導体素子用ステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200211 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20200212 Comment text: Request for Examination of Application |
|
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20210226 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20210825 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20211125 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20211126 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20241029 Start annual number: 4 End annual number: 4 |