KR20200022049A - 자율 차량들에 대한 컨텍스트 인식 정지 - Google Patents
자율 차량들에 대한 컨텍스트 인식 정지 Download PDFInfo
- Publication number
- KR20200022049A KR20200022049A KR1020207004845A KR20207004845A KR20200022049A KR 20200022049 A KR20200022049 A KR 20200022049A KR 1020207004845 A KR1020207004845 A KR 1020207004845A KR 20207004845 A KR20207004845 A KR 20207004845A KR 20200022049 A KR20200022049 A KR 20200022049A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- stop
- passenger
- location
- stopping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/644—Optimisation of travel parameters, e.g. of energy consumption, journey time or distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0025—Planning or execution of driving tasks specially adapted for specific operations
- B60W60/00253—Taxi operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18109—Braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/10—Interpretation of driver requests or demands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0025—Planning or execution of driving tasks specially adapted for specific operations
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0289—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling with means for avoiding collisions between vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/246—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM]
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/693—Coordinated control of the position or course of two or more vehicles for avoiding collisions between vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
- G08G1/202—Dispatching vehicles on the basis of a location, e.g. taxi dispatching
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/215—Selection or confirmation of options
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2101/00—Details of software or hardware architectures used for the control of position
- G05D2101/10—Details of software or hardware architectures used for the control of position using artificial intelligence [AI] techniques
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/133—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
Description
도 2는 예시적인 실시예에 따른 예시적인 시스템의 기능도이다.
도 3은 본 개시내용의 양태들에 따른 도 2의 시스템의 그림 도면(pictorial diagram)이다.
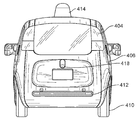
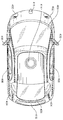
도 4a-4d는 본 개시내용의 양태들에 따른 차량의 예시적인 외부 뷰들이다.
도 5는 본 개시내용의 양태들에 따른 차량의 예시적인 내부 뷰이다.
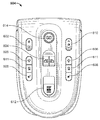
도 6은 본 개시내용의 양태들에 따른 차량의 콘솔의 예이다.
도 7은 본 개시내용의 양태들에 따른 버튼의 상태들의 예이다.
도 8은 본 개시내용의 양태들에 따른 차량의 다른 콘솔의 예이다.
도 9는 본 개시내용의 양태들에 따른 예시적인 지도이다.
도 10은 본 개시내용의 양태들에 따른 지리적인 구역의 예시적인 조감도이다.
도 11은 본 개시내용의 양태들에 따른 지리적인 구역 및 데이터의 예시적인 조감도이다.
도 12는 본 개시내용의 양태들에 따른 지리적인 구역 및 데이터의 다른 예시적인 조감도이다.
도 13은 본 개시내용의 양태들에 따른 트립의 스테이지들의 예시적인 추상적 표현이다.
도 14는 본 개시내용의 양태들에 따른 지리적인 구역 및 데이터의 추가의 예시적인 조감도이다.
도 15는 본 개시내용의 양태들에 따른 지리적인 구역 및 데이터의 추가의 예시적인 조감도이다.
도 16은 본 개시내용의 양태들에 따른 지리적인 구역 및 데이터의 추가의 예시적인 조감도이다.
도 17은 본 개시내용의 양태들에 따른 예시적인 흐름도이다.
Claims (20)
- 운전자가 없는 차량을 정지시키는 방법으로서,
승객이 상기 차량에 승차한 후, 하나 이상의 프로세서에 의해, 상기 차량을 자율 주행 모드에서 경로를 따라 목적지 장소 쪽으로 이동(maneuvering)하는 단계―상기 경로는 둘 이상의 스테이지로 분할됨―;
상기 하나 이상의 프로세서에 의해, 상기 승객이 상기 차량이 정지 또는 정차할 것을 요청하고 있음을 나타내는 신호를 수신하는 단계;
상기 신호를 수신하는 것에 응답하여, 상기 하나 이상의 프로세서에 의해, (1) 상기 승객이 상기 차량에 승차한 픽업 장소로부터의 상기 차량의 현재 거리, 또는 (2) 상기 목적지 장소로부터의 상기 차량의 현재 거리에 기초하여 상기 경로의 현재 스테이지를 결정하는 단계; 및
상기 하나 이상의 프로세서에 의해, 상기 결정된 현재 스테이지에 따라 상기 차량을 정지시키는 단계를 포함하는 방법. - 제1항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 승객이 상기 차량에 승차한 주차장에 있는 것에 대응하고, 상기 차량을 정지시키는 단계는 상기 신호가 수신될 때 상기 차량의 현재 장소에서 상기 차량을 정지시키는 것을 포함하는 방법. - 제2항에 있어서,
상기 차량이 정지되는 동안, 상기 승객이 상기 차량에서 하차하고 상기 차량에 재승차하기를 대기하는 것을 더 포함하는 방법. - 제1항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 픽업 장소로부터 미리 결정된 임계값 내에 있는 것에 대응하고, 상기 차량을 정지시키는 단계는 상기 신호가 수신될 때 상기 차량의 현재 장소에서 상기 차량을 정지시키는 것을 포함하는 방법. - 제4항에 있어서,
상기 차량이 정지되는 동안, 상기 승객이 상기 차량에서 하차하고 상기 차량에 재승차하기를 대기하는 것을 더 포함하는 방법. - 제1항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값보다 더 많이 떨어져 있는 것에 대응하고, 상기 차량을 정지시키는 단계는,
상기 차량이 정지하여 승객들이 상기 차량에서 하차하도록 허용할 수 있는 정차 지점들을 식별하는 지도 정보에 액세스하고;
상기 정차 지점들 중 이용가능한 하나를 식별하고;
상기 정차 지점들 중 상기 이용가능한 하나에서 상기 차량을 정지시키는 것을 포함하는 방법. - 제1항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값보다 더 많이 떨어져 있는 것에 대응하고, 상기 방법은,
상기 차량을 상기 목적지 쪽으로 이동하기 전에, 상기 목적지 장소를 상기 차량에 대한 목적지 목표로서 설정하는 단계; 및
상기 신호가 수신될 때 상기 차량의 현재 장소를 상기 차량에 대한 새로운 목적지 목표로서 설정하는 단계―상기 차량을 정지시키는 단계는 상기 새로운 목적지 목표에 더 기초함―를 더 포함하는 방법. - 제1항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값 내에 있는 것에 대응하고, 차량을 정지시키는 단계는 상기 신호가 수신될 때 상기 차량의 현재 장소에서 상기 차량을 정지시키는 것을 포함하는 방법. - 제1항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값 내에 있는 것에 대응하고, 상기 차량을 정지시키는 단계는 상기 차량이 정지하기 위해 이미 이동하고 있는지를 결정하고, 상기 차량이 정지하기 위해 이미 이동하고 있는 것으로 결정될 때, 정지하기 위해 이동하는 것을 계속하고 상기 신호를 무시하는 것을 포함하는 방법. - 운전자가 없는 차량을 정지시키기 위한 시스템으로서,
상기 시스템은 하나 이상의 프로세서를 갖는 하나 이상의 컴퓨팅 디바이스를 포함하고, 상기 하나 이상의 프로세서는,
승객이 상기 차량에 승차한 후, 상기 차량을 자율 주행 모드에서 경로를 따라 목적지 장소 쪽으로 이동―상기 경로는 둘 이상의 스테이지로 분할됨―하고;
상기 승객이 상기 차량이 정지 또는 정차할 것을 요청하고 있음을 나타내는 신호를 수신하고;
상기 신호를 수신하는 것에 응답하여, (1) 상기 승객이 상기 차량에 승차한 픽업 장소로부터의 상기 차량의 현재 거리, 또는 (2) 상기 목적지 장소로부터의 상기 차량의 현재 거리에 기초하여 상기 경로의 현재 스테이지를 결정하고;
상기 결정된 현재 스테이지에 따라 상기 차량을 정지시키도록 구성되는, 시스템. - 제10항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 승객이 상기 차량에 승차한 주차장에 있는 것에 대응하고, 상기 하나 이상의 프로세서는 상기 신호가 수신될 때 상기 차량의 현재 장소에서 상기 차량을 정지시킴으로써 상기 차량을 정지시키도록 더 구성되는, 시스템. - 제11항에 있어서,
상기 하나 이상의 프로세서는 상기 차량이 정지되는 동안, 상기 승객이 상기 차량에서 하차하고 상기 차량에 재승차하기를 대기하도록 더 구성되는, 시스템. - 제10항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 픽업 장소로부터 미리 결정된 임계값 내에 있는 것에 대응하고, 상기 하나 이상의 프로세서는 상기 신호가 수신될 때 상기 차량의 현재 장소에서 상기 차량을 정지시킴으로써 상기 차량을 정지시키도록 더 구성되는, 시스템. - 제13항에 있어서,
상기 하나 이상의 프로세서는 상기 차량이 정지되는 동안, 상기 승객이 상기 차량에서 하차하고 상기 차량에 재승차하기를 대기하도록 더 구성되는, 시스템. - 제10항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값보다 더 많이 떨어져 있는 것에 대응하고, 상기 하나 이상의 프로세서는,
상기 차량이 정지하여 승객들이 상기 차량에서 하차하도록 허용할 수 있는 정차 지점들을 식별하는 지도 정보에 액세스하고;
상기 정차 지점들 중 이용가능한 하나를 식별하고;
상기 정차 지점들 중 상기 이용가능한 하나에서 상기 차량을 정지시킴으로써, 상기 차량을 정지시키도록 더 구성되는, 시스템. - 제10항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값보다 더 많이 떨어져 있는 것에 대응하고, 상기 하나 이상의 프로세서는,
상기 차량을 상기 목적지 쪽으로 이동하기 전에, 상기 목적지 장소를 상기 차량에 대한 목적지 목표로서 설정하고;
상기 신호가 수신될 때 상기 차량의 현재 장소를 상기 차량에 대한 새로운 목적지 목표로서 설정―상기 차량을 정지시키는 것은 상기 새로운 목적지 목표에 더 기초함―하도록 더 구성되는, 시스템. - 제10항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값 내에 있는 것에 대응하고, 상기 하나 이상의 프로세서는 상기 신호가 수신될 때 상기 차량의 현재 장소에서 상기 차량을 정지시킴으로써 상기 차량을 정지시키도록 더 구성되는, 시스템. - 제10항에 있어서,
상기 결정된 현재 스테이지는 상기 차량이 상기 목적지 장소로부터 미리 결정된 임계값 내에 있는 것에 대응하고, 상기 차량을 정지시키는 것은 상기 차량이 정지하기 위해 이미 이동하고 있는지를 결정하고, 상기 차량이 정지하기 위해 이미 이동하고 있는 것으로 결정될 때, 정지하기 위해 이동하는 것을 계속하고 상기 신호를 무시하는 것을 포함하는, 시스템. - 제10항에 있어서,
상기 차량을 더 포함하는, 시스템. - 명령어들이 저장되는 비일시적 컴퓨터 판독가능 매체로서,
상기 명령어들은, 하나 이상의 프로세서에 의해 실행될 때, 상기 하나 이상의 프로세서로 하여금 운전자가 없는 차량을 정지시키는 방법을 수행하게 하고, 상기 방법은,
승객이 상기 차량에 승차한 후, 상기 차량을 자율 주행 모드에서 경로를 따라 목적지 장소 쪽으로 이동하는 단계―상기 경로는 둘 이상의 스테이지로 분할됨―;
상기 승객이 상기 차량이 정지 또는 정차할 것을 요청하고 있음을 나타내는 신호를 수신하는 단계;
상기 신호를 수신하는 것에 응답하여, (1) 상기 승객이 상기 차량에 승차한 픽업 장소로부터의 상기 차량의 현재 거리, 또는 (2) 상기 목적지 장소로부터의 상기 차량의 현재 거리에 기초하여 상기 경로의 현재 스테이지를 결정하는 단계; 및
상기 결정된 현재 스테이지에 따라 상기 차량을 정지시키는 단계를 포함하는, 비일시적 컴퓨터 판독가능 매체.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020227005467A KR20220028149A (ko) | 2017-08-22 | 2018-08-21 | 자율 차량들에 대한 컨텍스트 인식 정지 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/683,028 US10627815B2 (en) | 2017-08-22 | 2017-08-22 | Context aware stopping for autonomous vehicles |
| US15/683,028 | 2017-08-22 | ||
| PCT/US2018/047219 WO2019040431A1 (en) | 2017-08-22 | 2018-08-21 | CONTEXT SENSITIVE STOP FOR AUTONOMOUS VEHICLES |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227005467A Division KR20220028149A (ko) | 2017-08-22 | 2018-08-21 | 자율 차량들에 대한 컨텍스트 인식 정지 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200022049A true KR20200022049A (ko) | 2020-03-02 |
| KR102366292B1 KR102366292B1 (ko) | 2022-02-23 |
Family
ID=65437200
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207004845A Active KR102366292B1 (ko) | 2017-08-22 | 2018-08-21 | 자율 차량들에 대한 컨텍스트 인식 정지 |
| KR1020227005467A Ceased KR20220028149A (ko) | 2017-08-22 | 2018-08-21 | 자율 차량들에 대한 컨텍스트 인식 정지 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227005467A Ceased KR20220028149A (ko) | 2017-08-22 | 2018-08-21 | 자율 차량들에 대한 컨텍스트 인식 정지 |
Country Status (9)
| Country | Link |
|---|---|
| US (3) | US10627815B2 (ko) |
| EP (1) | EP3673339B1 (ko) |
| JP (2) | JP7109533B2 (ko) |
| KR (2) | KR102366292B1 (ko) |
| CN (1) | CN111033427B (ko) |
| AU (3) | AU2018321472B2 (ko) |
| CA (1) | CA3073281C (ko) |
| SG (1) | SG11202000642XA (ko) |
| WO (1) | WO2019040431A1 (ko) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10795356B2 (en) * | 2017-08-31 | 2020-10-06 | Uatc, Llc | Systems and methods for determining when to release control of an autonomous vehicle |
| KR102007227B1 (ko) * | 2017-09-12 | 2019-10-21 | 엘지전자 주식회사 | 컴퓨팅 디바이스 |
| EP3812231B1 (en) * | 2018-06-19 | 2024-10-23 | Nissan Motor Co., Ltd. | Travel information processing device and processing method |
| US11192543B2 (en) * | 2018-12-21 | 2021-12-07 | Ford Global Technologies, Llc | Systems and methods for automated stopping and/or parking of autonomous vehicles |
| JP7123840B2 (ja) * | 2019-03-19 | 2022-08-23 | 本田技研工業株式会社 | 車両制御装置、監視システム、車両制御方法、およびプログラム |
| CN109919593A (zh) * | 2019-03-21 | 2019-06-21 | 京东方科技集团股份有限公司 | 结算方法及系统、车载设备、计算机设备及介质 |
| US11332159B2 (en) * | 2019-03-21 | 2022-05-17 | Lg Electronics Inc. | Method for providing transportation service using autonomous vehicle |
| JP7088139B2 (ja) * | 2019-07-30 | 2022-06-21 | トヨタ自動車株式会社 | 運転制御装置 |
| US11048256B2 (en) * | 2019-08-09 | 2021-06-29 | Waymo Llc | Parking behaviors for autonomous vehicles |
| JP7143830B2 (ja) * | 2019-10-04 | 2022-09-29 | トヨタ自動車株式会社 | 自動運転制御システム |
| US11619505B2 (en) | 2020-07-15 | 2023-04-04 | Gm Cruise Holdings Llc | Autonomous vehicle intermediate stops |
| US11845467B2 (en) * | 2020-08-31 | 2023-12-19 | Ford Global Technologies, Llc | Systems and methods for directing a parked vehicle to travel from a first parking spot to a second parking spot |
| KR20220033077A (ko) * | 2020-09-07 | 2022-03-16 | 주식회사 라이드플럭스 | 속력 프로파일을 이용한 자율주행 차량의 정지 제어 방법, 장치 및 컴퓨터프로그램 |
| US11491909B2 (en) * | 2020-09-16 | 2022-11-08 | Waymo Llc | External facing communications for autonomous vehicles |
| US12077188B2 (en) | 2020-09-22 | 2024-09-03 | Waymo Llc | Leveraging weather information to improve passenger pickup and drop offs for autonomous vehicles |
| US20220135077A1 (en) * | 2020-10-29 | 2022-05-05 | Waymo Llc | Increasing awareness of passengers during pullovers and drop offs for autonomous vehicles |
| CN112330518A (zh) * | 2020-11-12 | 2021-02-05 | 广州小马慧行科技有限公司 | 驾驶控制方法、装置、非易失性存储介质及电子装置 |
| JP7405067B2 (ja) * | 2020-12-11 | 2023-12-26 | トヨタ自動車株式会社 | 車両の制御装置、及び車両の制御方法 |
| JP7447859B2 (ja) * | 2021-04-13 | 2024-03-12 | トヨタ自動車株式会社 | 情報処理装置および情報処理方法 |
| US20230058508A1 (en) * | 2021-08-19 | 2023-02-23 | GM Global Technology Operations LLC | System amd method for providing situational awareness interfaces for a vehicle occupant |
| JP7548159B2 (ja) * | 2021-08-19 | 2024-09-10 | トヨタ自動車株式会社 | 自動運転システム、自動運転方法およびプログラム |
| CN115042817B (zh) * | 2022-06-28 | 2025-09-30 | 广州小马慧行科技有限公司 | 基于自动驾驶的接乘方法、装置、计算机设备和存储介质 |
| CN116353630A (zh) * | 2023-03-28 | 2023-06-30 | 广州小马慧行科技有限公司 | 无人驾驶车辆停靠点的确定方法、装置与无人驾驶系统 |
| CN119845294A (zh) * | 2024-03-15 | 2025-04-18 | 北京航迹科技有限公司 | 控制地图组件的方法、装置、设备和存储介质 |
| CN121291443B (zh) * | 2025-12-11 | 2026-03-13 | 广州小马慧行科技有限公司 | 自动驾驶车辆的停车控制方法及装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170008215A (ko) * | 2014-05-23 | 2017-01-23 | 구글 인코포레이티드 | 자동 차량 |
| JP2017059254A (ja) * | 2014-04-30 | 2017-03-23 | みこらった株式会社 | 自動運転車及び自動運転車用プログラム |
Family Cites Families (46)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0192900A (ja) * | 1987-10-02 | 1989-04-12 | Tokico Ltd | 乗合い車両の停車指示システム |
| JP2001141493A (ja) * | 1999-11-09 | 2001-05-25 | Equos Research Co Ltd | ナビゲーション情報提供装置、通信ナビゲーション装置およびそのシステム |
| JP2002312439A (ja) * | 2001-04-11 | 2002-10-25 | Fujitsu Ten Ltd | 案内システム、携帯端末、車両側装置、受信側携帯端末、送信元携帯端末、乗降所側装置および乗降センター装置 |
| JP3910857B2 (ja) | 2002-01-28 | 2007-04-25 | 株式会社東芝 | 車両道路におけるスポット通信方法およびスポット通信システム |
| JP4610358B2 (ja) | 2005-01-31 | 2011-01-12 | クラリオン株式会社 | 案内放送装置、制御方法、及び制御プログラム |
| WO2007142461A1 (en) * | 2006-06-08 | 2007-12-13 | Lg Electronics Inc. | Method and apparatus for providing and using public transportation information |
| US9014960B2 (en) * | 2010-03-29 | 2015-04-21 | Here Global B.V. | Method of operating a navigation system |
| US8942991B2 (en) * | 2011-05-12 | 2015-01-27 | Accenture Global Services Limited | Agent-side traveler application for mobile computing devices |
| US20140012637A1 (en) * | 2012-07-06 | 2014-01-09 | Xerox Corporation | Traffic delay detection by mining ticket validation transactions |
| US10551851B2 (en) | 2013-07-01 | 2020-02-04 | Steven Sounyoung Yu | Autonomous unmanned road vehicle for making deliveries |
| US8874301B1 (en) | 2013-07-09 | 2014-10-28 | Ford Global Technologies, Llc | Autonomous vehicle with driver presence and physiological monitoring |
| WO2015099679A1 (en) | 2013-12-23 | 2015-07-02 | Intel Corporation | In-vehicle authorization for autonomous vehicles |
| US9631933B1 (en) | 2014-05-23 | 2017-04-25 | Google Inc. | Specifying unavailable locations for autonomous vehicles |
| JP6375772B2 (ja) * | 2014-08-11 | 2018-08-22 | 株式会社デンソー | 通報システム、情報処理システム、サーバ装置、端末装置、及びプログラム |
| US9377315B2 (en) | 2014-10-22 | 2016-06-28 | Myine Electronics, Inc. | System and method to provide valet instructions for a self-driving vehicle |
| US9547985B2 (en) | 2014-11-05 | 2017-01-17 | Here Global B.V. | Method and apparatus for providing access to autonomous vehicles based on user context |
| DE102015204947B4 (de) * | 2015-03-19 | 2021-09-09 | Ford Global Technologies, Llc | Verfahren und Vorrichtung zum Betrieb eines wahlweise manuell steuerbaren oder zu autonomem Fahren fähigen Fahrzeugs |
| EP3276307A4 (en) * | 2015-03-27 | 2018-03-07 | Nissan Motor Co., Ltd. | Shared vehicle managing apparatus and shared vehicle managing method |
| US9733096B2 (en) | 2015-06-22 | 2017-08-15 | Waymo Llc | Determining pickup and destination locations for autonomous vehicles |
| US9805605B2 (en) | 2015-08-12 | 2017-10-31 | Madhusoodhan Ramanujam | Using autonomous vehicles in a taxi service |
| US9494940B1 (en) | 2015-11-04 | 2016-11-15 | Zoox, Inc. | Quadrant configuration of robotic vehicles |
| US9754490B2 (en) * | 2015-11-04 | 2017-09-05 | Zoox, Inc. | Software application to request and control an autonomous vehicle service |
| US9613386B1 (en) * | 2015-12-01 | 2017-04-04 | Google Inc. | Pickup and drop off zones for autonomous vehicles |
| US10371543B1 (en) * | 2016-01-05 | 2019-08-06 | Open Invention Network Llc | Navigation application providing supplemental navigation information |
| US10137848B2 (en) * | 2016-01-13 | 2018-11-27 | Ford Global Technologies, Llc | System identifying a driver before they approach the vehicle using wireless communication protocols |
| CN107315359B (zh) * | 2016-04-27 | 2019-09-20 | 华为技术有限公司 | 车辆控制方法及系统 |
| US20170329347A1 (en) * | 2016-05-11 | 2017-11-16 | Brain Corporation | Systems and methods for training a robot to autonomously travel a route |
| US10438493B2 (en) * | 2016-08-24 | 2019-10-08 | Uber Technologies, Inc. | Hybrid trip planning for autonomous vehicles |
| JP2018030499A (ja) | 2016-08-25 | 2018-03-01 | 株式会社デンソーテン | 車外情報提供装置および車外情報提供方法 |
| US10262538B1 (en) * | 2016-09-22 | 2019-04-16 | Apple Inc. | Database management for potential pull-off areas |
| CN206231471U (zh) | 2016-10-11 | 2017-06-09 | 深圳市招科智控科技有限公司 | 一种出租车模式的无人驾驶公交车 |
| CN206231467U (zh) | 2016-10-11 | 2017-06-09 | 深圳市招科智控科技有限公司 | 一种地铁模式的无人驾驶公交车 |
| US10093200B2 (en) * | 2016-10-18 | 2018-10-09 | Ford Global Technologies, Llc | Reconfigurable seating assembly |
| US10331129B2 (en) * | 2016-10-20 | 2019-06-25 | nuTonomy Inc. | Identifying a stopping place for an autonomous vehicle |
| US10857994B2 (en) * | 2016-10-20 | 2020-12-08 | Motional Ad Llc | Identifying a stopping place for an autonomous vehicle |
| KR101982774B1 (ko) * | 2016-11-29 | 2019-05-27 | 엘지전자 주식회사 | 자율 주행 차량 |
| US9932038B1 (en) * | 2016-11-30 | 2018-04-03 | Baidu Usa Llc | Speed control for a full stop of an autonomous driving vehicle |
| WO2018143974A1 (en) * | 2017-02-01 | 2018-08-09 | Ford Global Technologies, Llc | Autonomous bus silent alarm |
| US20180237012A1 (en) * | 2017-02-22 | 2018-08-23 | Ford Global Technologies, Llc | Autonomous vehicle towing |
| US11377108B2 (en) * | 2017-04-03 | 2022-07-05 | Motional Ad Llc | Processing a request signal regarding operation of an autonomous vehicle |
| US10753763B2 (en) * | 2017-04-10 | 2020-08-25 | Chian Chiu Li | Autonomous driving under user instructions |
| US10495471B2 (en) * | 2017-05-09 | 2019-12-03 | Uber Technologies, Inc. | Destination changes in autonomous vehicles |
| US10330482B2 (en) * | 2017-07-28 | 2019-06-25 | Uber Technologies, Inc. | Dynamically determining origin and destination locations for a network system |
| US20190108468A1 (en) * | 2017-10-10 | 2019-04-11 | Khanh Vinh Nguyen | Method and apparatus to operate smart mass transit systems with on-demand rides, dynamic routes and coordinated transfers |
| DE102017220116A1 (de) * | 2017-11-13 | 2019-05-16 | Ford Global Technologies, Llc | Verfahren und Vorrichtung um einen schnellen Halt eines autonom fahrenden Fahrzeugs zu ermöglichen |
| CN212750054U (zh) | 2020-05-21 | 2021-03-19 | 中通客车控股股份有限公司 | 一种智能下车提示装置 |
-
2017
- 2017-08-22 US US15/683,028 patent/US10627815B2/en not_active Expired - Fee Related
-
2018
- 2018-08-21 KR KR1020207004845A patent/KR102366292B1/ko active Active
- 2018-08-21 WO PCT/US2018/047219 patent/WO2019040431A1/en not_active Ceased
- 2018-08-21 KR KR1020227005467A patent/KR20220028149A/ko not_active Ceased
- 2018-08-21 EP EP18848961.1A patent/EP3673339B1/en active Active
- 2018-08-21 AU AU2018321472A patent/AU2018321472B2/en not_active Ceased
- 2018-08-21 JP JP2020504003A patent/JP7109533B2/ja active Active
- 2018-08-21 CN CN201880054394.5A patent/CN111033427B/zh active Active
- 2018-08-21 SG SG11202000642XA patent/SG11202000642XA/en unknown
- 2018-08-21 CA CA3073281A patent/CA3073281C/en active Active
-
2020
- 2020-03-11 US US16/815,751 patent/US11422558B2/en active Active
- 2020-11-23 AU AU2020277089A patent/AU2020277089B2/en not_active Ceased
-
2022
- 2022-01-03 AU AU2022200001A patent/AU2022200001B2/en active Active
- 2022-04-18 JP JP2022068054A patent/JP7344339B2/ja active Active
- 2022-07-14 US US17/865,007 patent/US20220390944A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017059254A (ja) * | 2014-04-30 | 2017-03-23 | みこらった株式会社 | 自動運転車及び自動運転車用プログラム |
| KR20170008215A (ko) * | 2014-05-23 | 2017-01-23 | 구글 인코포레이티드 | 자동 차량 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20220028149A (ko) | 2022-03-08 |
| AU2020277089B2 (en) | 2021-10-07 |
| US20220390944A1 (en) | 2022-12-08 |
| AU2022200001A1 (en) | 2022-02-03 |
| US11422558B2 (en) | 2022-08-23 |
| WO2019040431A8 (en) | 2020-02-20 |
| JP7344339B2 (ja) | 2023-09-13 |
| CA3073281A1 (en) | 2019-02-28 |
| KR102366292B1 (ko) | 2022-02-23 |
| AU2018321472B2 (en) | 2020-09-10 |
| AU2018321472A1 (en) | 2020-02-13 |
| AU2020277089A1 (en) | 2020-12-24 |
| JP7109533B2 (ja) | 2022-07-29 |
| SG11202000642XA (en) | 2020-03-30 |
| US20200264612A1 (en) | 2020-08-20 |
| CN111033427B (zh) | 2023-09-12 |
| CN111033427A (zh) | 2020-04-17 |
| JP2022109943A (ja) | 2022-07-28 |
| EP3673339A4 (en) | 2021-05-26 |
| WO2019040431A1 (en) | 2019-02-28 |
| JP2020531944A (ja) | 2020-11-05 |
| US10627815B2 (en) | 2020-04-21 |
| AU2022200001B2 (en) | 2022-12-08 |
| CA3073281C (en) | 2023-08-29 |
| EP3673339A1 (en) | 2020-07-01 |
| EP3673339B1 (en) | 2025-07-23 |
| US20190064808A1 (en) | 2019-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7344339B2 (ja) | 自律車両のための状況認識停車 | |
| US11914377B1 (en) | Autonomous vehicle behavior when waiting for passengers | |
| AU2021203701B2 (en) | Recognizing assigned passengers for autonomous vehicles | |
| KR102309575B1 (ko) | 자율 차량들에서의 승객들의 조기 탑승 | |
| KR102219595B1 (ko) | 자율 차량들의 승객 픽업 배치 | |
| KR20200022053A (ko) | 자율 차량들에 대한 미할당 승객들의 식별 | |
| US20190155283A1 (en) | Determining pullover locations for autonomous vehicles | |
| CN116472213A (zh) | 整体寻路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| A107 | Divisional application of patent | ||
| GRNT | Written decision to grant | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A18-div-PA0104 St.27 status event code: A-0-1-A10-A16-div-PA0104 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |