KR20200022425A - 비-접촉식 핸들러 및 이를 이용한 작업물 취급 방법 - Google Patents
비-접촉식 핸들러 및 이를 이용한 작업물 취급 방법 Download PDFInfo
- Publication number
- KR20200022425A KR20200022425A KR1020207000030A KR20207000030A KR20200022425A KR 20200022425 A KR20200022425 A KR 20200022425A KR 1020207000030 A KR1020207000030 A KR 1020207000030A KR 20207000030 A KR20207000030 A KR 20207000030A KR 20200022425 A KR20200022425 A KR 20200022425A
- Authority
- KR
- South Korea
- Prior art keywords
- contact
- puck
- handler
- effector
- lifted
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/91—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/91—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers
- B65G47/911—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers with air blasts producing partial vacuum
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
- B25J15/0675—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum of the ejector type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
Abstract
Description
도 2는 도 1에 도시된 비-접촉식 핸들러에서 하부 몸체 부분의 부분 단면도를 도시한다.
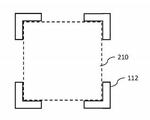
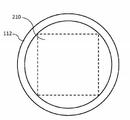
도 3 및 도 5 내지 도 7은 일부 실시예에 따라 구현될 수 있는, 도 1에 도시된 비-접촉식 핸들러에 의해 취급되는 객체에 관련된 격납 펜스 배열을 도시하는 저면도를 도시한다.
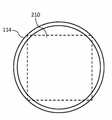
도 4 및 도 8 내지 도 10은 일부 실시예에 따라 구현될 수 있는, 도 1에 도시된 비-접촉식 핸들러에 의해 취급되는 객체에 관련된 작업물 지지부 배열을 도시하는 저면도를 도시한다.
Claims (9)
- 비-접촉식 핸들러(non-contact handler)로서,
상부 몸체 부분; 및
상기 상부 몸체 부분에 이동 가능하게 결합된 하부 몸체 부분 -- 상기 하부 몸체 부분은:
객체를 들어 올리도록 구성된 비-접촉식 퍽(puck); 및
상기 퍽으로부터 하부 방향으로 연장되는 복수의 격납 펜스 - 상기 복수의 격납 펜스는 들어 올려질 상기 객체의 주변 주위에 배열됨 -을 포함함 --을 포함하는, 비-접촉식 핸들러. - 제1항에 있어서, 상기 비-접촉식 퍽은 베르누이 타입(Bernoulli-type)의 비접촉식 퍽인, 비-접촉식 핸들러.
- 제1항에 있어서, 상기 비-접촉식 퍽은 사이클론 타입(cyclone-type)의 비 접촉식 퍽인, 비-접촉식 핸들러.
- 제1항에 있어서, 상기 복수의 격납 펜스 중 적어도 하나는 상기 객체가 들어 올려질 때, 들어 올려질 상기 객체의 에지(edge)와 맞물리도록 구성되는 가이드 표면을 포함하는, 비-접촉식 핸들러.
- 제1항에 있어서, 상기 비-접촉식 퍽에 결합된 작업물 지지부를 더 포함하고, 상기 작업물 지지부는 상기 객체가 상기 비-접촉식 퍽에 의해 들어 올려질 때 들어 올려질 상기 객체의 에지에 접촉하도록 구성되는, 비-접촉식 핸들러.
- 제1항에 있어서, 상기 비-접촉식 퍽은:
가압된 유체원의 배출 단부를 수용하도록 구성된 몸체 통로를 갖는 퍽 몸체; 및
상기 퍽 몸체에 부착된 단부 이펙터 플레이트를 포함하고, 상기 단부 이펙터 플레이트는 이격되어 상기 퍽 몸체를 향하는 이펙터 표면을 포함하는, 비-접촉식 핸들러. - 제6항에 있어서, 상기 단부 이펙터 플레이트는:
상기 단부 이펙터 플레이트를 통해 연장되는 이펙터 통로를 포함하고, 상기 이펙터 통로는 상기 몸체 통로와 유체 연통하는 제1 부분 및 상기 제1 부분과 유체 연통하고 상기 이펙터 표면과 교차하는 제2 부분을 포함하는, 비-접촉식 핸들러. - 제7항에 있어서, 상기 이펙터 통로의 상기 제1 부분은 상기 이펙터 표면과 교차하도록 상기 단부 이펙터 플레이트를 통해 연장되는, 비-접촉식 핸들러.
- 제8항에 있어서, 상기 이펙터 통로의 상기 제1 부분은 상기 이펙터 표면의 중심과 교차하는, 비-접촉식 핸들러.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762535427P | 2017-07-21 | 2017-07-21 | |
| US62/535,427 | 2017-07-21 | ||
| PCT/US2018/043121 WO2019018786A1 (en) | 2017-07-21 | 2018-07-20 | CONTACTLESS MANIPULATOR AND METHOD FOR HANDLING PARTS USING THE SAME |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200022425A true KR20200022425A (ko) | 2020-03-03 |
| KR102523381B1 KR102523381B1 (ko) | 2023-04-20 |
Family
ID=65015617
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207000030A Active KR102523381B1 (ko) | 2017-07-21 | 2018-07-20 | 비-접촉식 핸들러 및 이를 이용한 작업물 취급 방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11254014B2 (ko) |
| EP (1) | EP3655352A4 (ko) |
| JP (1) | JP7374075B2 (ko) |
| KR (1) | KR102523381B1 (ko) |
| CN (1) | CN110869299A (ko) |
| TW (1) | TWI791561B (ko) |
| WO (1) | WO2019018786A1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI745690B (zh) * | 2019-05-15 | 2021-11-11 | 鴻鉑科技有限公司 | 薄板堆疊裝置及其使用方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0580090B2 (ko) * | 1984-01-20 | 1993-11-05 | Tokin Corp | |
| US20070200377A1 (en) * | 2003-11-21 | 2007-08-30 | Mitsuboshi Diamond Industrial, Co., Ltd. | Vacuum Suction Head, And Vacuum Suction Device And Table Using The Same |
| JP2008168413A (ja) * | 2007-01-15 | 2008-07-24 | Lintec Corp | 保持装置及び保持方法 |
| US20080292446A1 (en) * | 2005-11-04 | 2008-11-27 | The University Of Salford | Handling Device |
| JP2014136263A (ja) * | 2013-01-15 | 2014-07-28 | Sinfonia Technology Co Ltd | 吸着装置及びこれを備えた搬送装置 |
| KR20180037579A (ko) * | 2016-10-04 | 2018-04-12 | 가부시기가이샤 디스코 | 로보트 핸드 및 반송 로보트 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3438668A (en) * | 1965-08-26 | 1969-04-15 | Gen Electric | Contactless lifter |
| US3523706A (en) * | 1967-10-27 | 1970-08-11 | Ibm | Apparatus for supporting articles without structural contact and for positioning the supported articles |
| US3539216A (en) * | 1968-01-11 | 1970-11-10 | Sprague Electric Co | Pickup device |
| JPS5790956A (en) * | 1980-11-28 | 1982-06-05 | Hitachi Ltd | Gripper for wafer |
| JPS5948938B2 (ja) | 1981-06-03 | 1984-11-29 | 新日本製鐵株式会社 | 焼結機における顕熱回収並びに排ガス処理方法 |
| JPS58141536A (ja) | 1982-02-17 | 1983-08-22 | Sanyo Electric Co Ltd | 半導体ウエハ−の吸着ヘツド |
| JPS5948938A (ja) * | 1982-09-14 | 1984-03-21 | Toshiba Corp | ウエハ−チヤツク |
| US5067762A (en) * | 1985-06-18 | 1991-11-26 | Hiroshi Akashi | Non-contact conveying device |
| JP2865690B2 (ja) * | 1989-02-17 | 1999-03-08 | 株式会社日立製作所 | 嵌合挿入装置 |
| JP2507587B2 (ja) * | 1989-03-27 | 1996-06-12 | 九州日本電気株式会社 | 吹き付け式半導体基板等吸着装置 |
| US4969676A (en) * | 1989-06-23 | 1990-11-13 | At&T Bell Laboratories | Air pressure pick-up tool |
| GB9017791D0 (en) * | 1990-08-14 | 1990-09-26 | Portsmouth Tech Consult | Vacuum gripper devices |
| US5169196A (en) | 1991-06-17 | 1992-12-08 | Safabakhsh Ali R | Non-contact pick-up head |
| US5997588A (en) * | 1995-10-13 | 1999-12-07 | Advanced Semiconductor Materials America, Inc. | Semiconductor processing system with gas curtain |
| US6099056A (en) * | 1996-05-31 | 2000-08-08 | Ipec Precision, Inc. | Non-contact holder for wafer-like articles |
| DE19755694C2 (de) * | 1997-12-16 | 2000-05-31 | Sez Semiconduct Equip Zubehoer | Handhabungsvorrichtung für dünne, scheibenförmige Gegenstände |
| JP2001170880A (ja) | 1999-12-16 | 2001-06-26 | Murata Mach Ltd | ロボットハンド |
| EP1233442B1 (en) * | 2001-02-20 | 2009-10-14 | Harmotec Corporation | Non-contacting conveyance equipment |
| JP2004193195A (ja) * | 2002-12-09 | 2004-07-08 | Shinko Electric Ind Co Ltd | 搬送装置 |
| JP4243766B2 (ja) * | 2006-10-02 | 2009-03-25 | Smc株式会社 | 非接触搬送装置 |
| JP2010114101A (ja) * | 2007-02-23 | 2010-05-20 | Tokyo Electron Ltd | 基板処理装置および基板処理方法 |
| JP5009179B2 (ja) | 2008-01-25 | 2012-08-22 | 株式会社ディスコ | ウェーハ搬送装置およびウェーハ加工装置 |
| KR100859835B1 (ko) * | 2008-05-13 | 2008-09-23 | 한국뉴매틱(주) | 비접촉식 진공패드 |
| JP5110480B2 (ja) * | 2010-05-11 | 2012-12-26 | Smc株式会社 | 非接触搬送装置 |
| JP5524766B2 (ja) | 2010-08-19 | 2014-06-18 | 株式会社ディスコ | 平行度確認治具 |
| US9010827B2 (en) * | 2011-11-18 | 2015-04-21 | Nike, Inc. | Switchable plate manufacturing vacuum tool |
| US8904629B2 (en) * | 2012-03-09 | 2014-12-09 | LG CNS Co. Ltd. | Light-emitting diode (LED) wafer picker |
| US10410906B2 (en) * | 2012-11-27 | 2019-09-10 | Acm Research (Shanghai) Inc. | Substrate supporting apparatus |
| TWI644390B (zh) * | 2014-05-16 | 2018-12-11 | 大陸商盛美半導體設備(上海)有限公司 | Substrate support device |
| CN204748618U (zh) | 2015-05-15 | 2015-11-11 | 楚天科技股份有限公司 | 一种智能码垛机器人 |
-
2018
- 2018-07-20 EP EP18834637.3A patent/EP3655352A4/en not_active Withdrawn
- 2018-07-20 US US16/621,630 patent/US11254014B2/en active Active
- 2018-07-20 KR KR1020207000030A patent/KR102523381B1/ko active Active
- 2018-07-20 WO PCT/US2018/043121 patent/WO2019018786A1/en not_active Ceased
- 2018-07-20 TW TW107125195A patent/TWI791561B/zh active
- 2018-07-20 CN CN201880043732.5A patent/CN110869299A/zh active Pending
- 2018-07-20 JP JP2020502102A patent/JP7374075B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0580090B2 (ko) * | 1984-01-20 | 1993-11-05 | Tokin Corp | |
| US20070200377A1 (en) * | 2003-11-21 | 2007-08-30 | Mitsuboshi Diamond Industrial, Co., Ltd. | Vacuum Suction Head, And Vacuum Suction Device And Table Using The Same |
| US20080292446A1 (en) * | 2005-11-04 | 2008-11-27 | The University Of Salford | Handling Device |
| JP2008168413A (ja) * | 2007-01-15 | 2008-07-24 | Lintec Corp | 保持装置及び保持方法 |
| JP2014136263A (ja) * | 2013-01-15 | 2014-07-28 | Sinfonia Technology Co Ltd | 吸着装置及びこれを備えた搬送装置 |
| KR20180037579A (ko) * | 2016-10-04 | 2018-04-12 | 가부시기가이샤 디스코 | 로보트 핸드 및 반송 로보트 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020527862A (ja) | 2020-09-10 |
| TW201909325A (zh) | 2019-03-01 |
| WO2019018786A1 (en) | 2019-01-24 |
| US11254014B2 (en) | 2022-02-22 |
| KR102523381B1 (ko) | 2023-04-20 |
| TWI791561B (zh) | 2023-02-11 |
| CN110869299A (zh) | 2020-03-06 |
| EP3655352A1 (en) | 2020-05-27 |
| US20200156264A1 (en) | 2020-05-21 |
| JP7374075B2 (ja) | 2023-11-06 |
| EP3655352A4 (en) | 2021-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4724562B2 (ja) | 真空吸着ヘッド、その真空吸着ヘッドを用いた真空吸着装置及びテーブル | |
| EP3605597B1 (en) | Silicon chip holding device, silicon chip conveying device, silicon chip delivery system and conveying method | |
| CN107877536B (zh) | 移载单元、移载装置以及保持单元 | |
| KR102512399B1 (ko) | 기판 보유 지지 장치 | |
| KR101896800B1 (ko) | 반도체 패키지 픽업 장치 | |
| US10875196B2 (en) | Gripping device and industrial robot | |
| JP2001179672A (ja) | ロボットハンド | |
| US20160016318A1 (en) | Suction device | |
| CN107527848B (zh) | 一种机械手臂及基板的抓取方法 | |
| TWI657901B (zh) | 膜吸附機構 | |
| JP2020004846A (ja) | アライメント装置、半導体ウエハ処理装置、およびアライメント方法 | |
| US20240165829A1 (en) | Vacuum suction head and apparatus for transferring semiconductor product using the same | |
| JP2017084498A (ja) | 電極箔の搬送装置および積層型電池の製造装置 | |
| KR102523381B1 (ko) | 비-접촉식 핸들러 및 이를 이용한 작업물 취급 방법 | |
| JP2005179032A (ja) | 吸着装置 | |
| JP7562377B2 (ja) | 産業用ロボットの教示方法 | |
| JP6563322B2 (ja) | 搬送装置 | |
| JP4704365B2 (ja) | 物品載置装置 | |
| CN108074848A (zh) | 垫片、晶圆堆叠结构、吸附式移动装置与晶圆移动方法 | |
| KR102312853B1 (ko) | 반도체 패키지 이송 장치 | |
| JP7316033B2 (ja) | 基板搬送装置および基板搬送方法 | |
| CN105552015A (zh) | 处理半导体封装体的装置及用该装置获其位置信息的方法 | |
| JP6059270B2 (ja) | 脆性材料基板の搬送装置 | |
| US11062935B2 (en) | Low profile wafer manipulator | |
| JPH03272156A (ja) | 半導体ウエハの保持装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |