KR20200023425A - 연속적인 수직 관형 취급 및 인상 부양 구조물 - Google Patents
연속적인 수직 관형 취급 및 인상 부양 구조물 Download PDFInfo
- Publication number
- KR20200023425A KR20200023425A KR1020207002494A KR20207002494A KR20200023425A KR 20200023425 A KR20200023425 A KR 20200023425A KR 1020207002494 A KR1020207002494 A KR 1020207002494A KR 20207002494 A KR20207002494 A KR 20207002494A KR 20200023425 A KR20200023425 A KR 20200023425A
- Authority
- KR
- South Korea
- Prior art keywords
- hull
- marine
- keel
- elliptical
- main deck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005188 flotation Methods 0.000 title claims abstract description 68
- 238000005553 drilling Methods 0.000 claims abstract description 66
- 238000004891 communication Methods 0.000 claims abstract description 27
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims abstract description 10
- 230000032258 transport Effects 0.000 claims description 15
- 239000000463 material Substances 0.000 claims description 14
- 238000003032 molecular docking Methods 0.000 claims description 4
- 230000004308 accommodation Effects 0.000 claims description 3
- 230000007246 mechanism Effects 0.000 claims description 3
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 claims description 2
- 239000000470 constituent Substances 0.000 claims description 2
- 238000000034 method Methods 0.000 claims 14
- 230000008878 coupling Effects 0.000 claims 1
- 238000010168 coupling process Methods 0.000 claims 1
- 238000005859 coupling reaction Methods 0.000 claims 1
- 230000003247 decreasing effect Effects 0.000 claims 1
- 238000009434 installation Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000007667 floating Methods 0.000 description 5
- 230000005484 gravity Effects 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 230000008439 repair process Effects 0.000 description 2
- 241001272720 Medialuna californiensis Species 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- VIQCGTZFEYDQMR-UHFFFAOYSA-N fluphenazine decanoate Chemical compound C1CN(CCOC(=O)CCCCCCCCC)CCN1CCCN1C2=CC(C(F)(F)F)=CC=C2SC2=CC=CC=C21 VIQCGTZFEYDQMR-UHFFFAOYSA-N 0.000 description 1
- 231100001261 hazardous Toxicity 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000012855 volatile organic compound Substances 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
- B63B35/4413—Floating drilling platforms, e.g. carrying water-oil separating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B21/00—Tying-up; Shifting, towing, or pushing equipment; Anchoring
- B63B21/50—Anchoring arrangements or methods for special vessels, e.g. for floating drilling platforms or dredgers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B1/00—Hydrodynamic or hydrostatic features of hulls or of hydrofoils
- B63B1/02—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement
- B63B1/04—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with single hull
- B63B1/041—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with single hull with disk-shaped hull
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B15/00—Superstructures, deckhouses, wheelhouses or the like; Arrangements or adaptations of masts or spars, e.g. bowsprits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/08—Arrangement of ship-based loading or unloading equipment for cargo or passengers of winches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/10—Arrangement of ship-based loading or unloading equipment for cargo or passengers of cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/14—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/005—Equipment to decrease ship's vibrations produced externally to the ship, e.g. wave-induced vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B39/00—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude
- B63B39/02—Equipment to decrease pitch, roll, or like unwanted vessel movements; Apparatus for indicating vessel attitude to decrease vessel movements by displacement of masses
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B19/00—Handling rods, casings, tubes or the like outside the borehole, e.g. in the derrick; Apparatus for feeding the rods or cables
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B19/00—Handling rods, casings, tubes or the like outside the borehole, e.g. in the derrick; Apparatus for feeding the rods or cables
- E21B19/14—Racks, ramps, troughs or bins, for holding the lengths of rod singly or connected; Handling between storage place and borehole
- E21B19/143—Racks, ramps, troughs or bins, for holding the lengths of rod singly or connected; Handling between storage place and borehole specially adapted for underwater drilling
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B19/00—Handling rods, casings, tubes or the like outside the borehole, e.g. in the derrick; Apparatus for feeding the rods or cables
- E21B19/20—Combined feeding from rack and connecting, e.g. automatically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B3/00—Hulls characterised by their structure or component parts
- B63B3/14—Hull parts
- B63B2003/147—Moon-pools, e.g. for offshore drilling vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B21/00—Tying-up; Shifting, towing, or pushing equipment; Anchoring
- B63B2021/003—Mooring or anchoring equipment, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
- B63B2035/4473—Floating structures supporting industrial plants, such as factories, refineries, or the like
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/44—Floating buildings, stores, drilling platforms, or workshops, e.g. carrying water-oil separating devices
- B63B2035/448—Floating hydrocarbon production vessels, e.g. Floating Production Storage and Offloading vessels [FPSO]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/50—Vessels or floating structures for aircraft
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Environmental & Geological Engineering (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Earth Drilling (AREA)
- Piles And Underground Anchors (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Removal Of Floating Material (AREA)
Abstract
Description
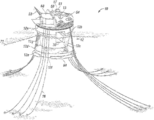
도 1은 연속적인 수직 관형 취급 및 인상 부양 구조물의 사시도이다.
도 2는 연속적인 수직 관형 취급 및 인상 부양 구조물의 선체의 수직 프로파일도이다.
도 3은 작업 깊이에서 떠 있는 연속적인 수직 관형 취급 및 인상 부양 구조물의 확대 사시도이다.
도 4는 연속적인 수직 관형 취급 및 인상 부양 구조물의 이중 스파이어 구성의 측면도이다.
도 5는 연속적인 수직 관형 취급 및 인상 부양 구조물의 상평면도이다.
도 6은 시추 파이프와 함께 사용되는 제 3 스파이어의 상세도이다.
도 7은 제어기에 연결되는 부양 구조물의 구성품의 도이다.
도 8은 일 실시 형태에 따른 제어기의 도이다.
도 9는 해저 전개 시스템을 갖는 동적 교차 지지 비임의 상세도이다.
도 10은 자동화된 랙킹 시스템의 상세도이다.
도 11은 원통형일 수 있는 중간 목부를 갖는 연속적인 수직 관형 취급 및 인상 부양 구조물의 측면도이다.
도 12는 중간 목부를 갖는 연속적인 수직 관형 취급 및 인상 부양 구조물의 상세도이다.
도 13은 운송 구성으로 있는 중간 목부를 갖는 연속적인 수직 관형 취급 및 인상 부양 구조물의 부분 절단도이다.
도 14는 작업 구성으로 있는 중간 목부를 갖는 연속적인 수직 관형 취급 및 인상 부양 구조물의 부분 절단도이다.
Claims (15)
- 축선을 가지며 해양 대상물을 구성하고 분해하고 또한 설치하기 위한 연속적인 수직 관형 취급 및 인상 부양 구조물로서,
a. 선체(hull) - 상기 선체는,
(ⅰ) 주 갑판;
(ⅱ) 상기 주 갑판에 연결되는 상측 목부;
(ⅲ) 상기 상측 목부에 연결되는 상측 절두 원추형 측면부;
(ⅳ) 상기 상측 절두 원추형 측면부에 연결되는 중간 목부;
(ⅴ) 상기 중간 목부로부터 연장되어 있는 하측 절두 원추형 측면부;
(ⅵ) 상기 하측 절두 원추형 측면부로부터 연장되어 있는 하측 목부;
(ⅶ) 상기 하측 목부에 장착되는 수평면을 갖는 타원형 용골(keel);
(ⅷ) 상기 타원형 용골의 외측 부분 및 선체에 형성되어 있는 문 풀(moon pool)에 고정되는 핀(fin)형 부속물;
(ⅸ) 상기 주 갑판과 타원형 용골 위쪽에서 상기 문 풀 주위에 장착되는 시추 바닥;
(ⅹ) 구성된 해양 라이저를 수용하기 위해 상기 주 갑판을 통과하여 상기 축선에 평행하게 상기 타원형 용골 쪽으로 연장되어 있는 해양 라이저 스탠드;
(ⅹⅰ) 구성된 케이싱을 수용하기 위해 상기 주 갑판을 통과하여 상기 축선에 평행하게 상기 타원형 용골 쪽으로 연장되어 있는 케이싱 스탠드;
(ⅹⅱ) 구성된 시추 파이프를 수용하기 위해 상기 주 갑판을 통과하여 상기 축선에 평행하게 상기 타원형 용골 쪽으로 연장되어 있는 시추 파이프 스탠드; 및
(ⅹⅲ) 가로 바아로 선체에 장착되는 스파이어(spire)를 포함하고,
각 스탠드는 상기 타원형 용골의 수평면에 대해 60도 내지 120도의 각도로 배향되며, 구성된 해양 라이저, 구성된 케이싱 또는 구성된 시추 파이프 각각은 50 피트 내지 270 피트의 길이를 가짐 -;
b. 프로세서와 컴퓨터 판독 가능한 매체를 갖는 제어기 - 상기 컴퓨터 판독 가능한 매체는 선체 내의 해양 대상물에 대한 우선권 영역을 갖는 선박 관리 시스템을 포함함 -;
c. 상기 문 풀 가까이에서 상기 가로 바아에 장착되고 제어기와 연통하며 또한 적어도 하나의 동적 교차 지지 부재를 포함하는 수직 방향으로 조절 가능한 비임 교차 인양기;
d. 상기 제어기와 연통하여 상기 선체에 장착되고, 구성된 해양 라이저를 상기 해앙 라이저 스탠드에 그리고 구성된 케이싱을 상기 케이싱 스탠드에 설치하고 제거하도록 구성되어 있는 자동화된 랙킹(racking) 시스템; 및
e. 상기 제어기와 연통하고 상기 자동화된 랙킹 시스템에 인접하여 선체에 장착되고, 상기 타원형 용골의 수평면에 대해 55도 내지 125도의 각도로 해양 라이저, 케이싱 및 시추 파이프를 구성하도록 구성되어 있는 자동화된 스탠드 구축 시스템을 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
상기 수직 방향으로 조절 가능한 비임 교차 인양기에 고정되고 상기 제어기와 연통하는 윈치(winch) 시스템을 갖는 해저 시험 트리를 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
상기 수직 방향으로 조절 가능한 비임 교차 인양기는 제 1 및 제 2의 추가적인 평행한 인양 스파이어를 포함하고, 상기 수직 방향으로 조절 가능한 비임 교차 인양기는 상기 한쌍의 스파이어 사이를 연결하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
상기 주 갑판은 상부 구조물을 가지며, 이 상부 구조물은 승무원 숙박시설, 헬리포트, 크레인, 제어 탑, 제어 탑에 있는 동적 위치 시스템 및 항공기 행거로 이루어진 그룹에서 선택되는 적어도 하나의 부재를 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
상기 문 풀은, 선체의 수평면에서, 타원형, 직사각형, 오각형 및 다각형 중에서 선택되는 형상을 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
상기 문 풀은 상기 축선에 평행하게 연장되어 있는 절두 원추 형상을 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 3 항에 있어서,
상기 수직 방향으로 조절 가능한 비임 교차 인양기는 "H" 형상을 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 3 항에 있어서,
상기 동적 교차 지지 부재는, 상기 제 1 스파이어와 제 2 스파이어 사이에 형성되고 동적 교차 지지 부재에 부착되는 구성 분해 영역을 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 8 항에 있어서,
적어도 하나의 스파이어에 고정되고 상기 제어기와 연통하는 도킹 시스템을 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
해저 전개 시스템을 포함하고, 이 해저 전개 시스템은,
a. 상기 동적 교차 지지 부재에 장착되는 복수의 쉬브(sheave);
b. 상기 복수의 쉬브에 장착되는 인양 시스템을 갖는 자동적으로 조절 가능한 융기(heave) 보상기; 및
c. 상기 해양 대상물을 상기 문 풀을 통해 해저에 전개하기 위해 상기 수직 방향으로 조절 가능한 비임 교차 인양기에 연결되어 있는 훅크를 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
상기 자동화된 랙킹 시스템은,
a. 스파이어와 결합하기 위한 랫칭 기구;
b. 적어도 하나의 스파이어에 장착되어, 상기 동적 교차 지지 부재를 작동시켜, 구성된 해양 관의 높이 및 바닥 구멍 어셈블리의 높이를 조절하는 랙 및 피니언; 및
c. 복수의 유압 피스톤을 포함하고,
각 유압 피스톤은 한 단부에서 적어도 하나의 스파이어에 부착되고 다른 단부에서는 상기 동적 교차 지지 부재에 부착되며, 상기 복수의 유압 피스톤은 동적 교차 지지 부재를 타원형 용골의 수평면에 평행한 수평면 쪽으로 또한 그로부터 각지게 하도록 구성되어 있는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
a. 상기 제어기와 연통하여 상기 선체 장착되고, 들어오고 나가는 해양 대상물에 부착되어 있는 RFID 코드를 스캔하도록 구성되어 있는 복수의 RFID 판독기 - 각 RFID 코드는 선체에 있는 우선권 영역을 나타내고, RFID 판독기는, 상기 문 풀, 자동화된 랙킹 시스템, 시추 바닥, 주 갑판 및 주 갑판과 선체의 타원형 용골 사이의 영역 중의 적어도 하나에 인접하여 설치됨 -;
b. 상기 제어기와 연통하여 상기 선체에 장착되며, 폐쇄 회로 텔레비젼 공급물을 상기 컴퓨터 판독 가능한 매체에 제공하는 폐쇄 회로 텔레비젼;
c. 상기 컴퓨터 판독 가능한 매체에 있고 RFID 코드를 선체 내의 해양 대상물 중의 하나에 연결하는 RFID 데이타베이스;
d. 상기 컴퓨터 판독 가능한 매체에 있는 재료 인식 시스템;
e. 상기 프로세서에 지시하여 재료 인식 시스템과 함께 상기 폐쇄 회로 텔레비젼 공급물을 사용하여 상기 RFID 데이타베이스를 사용해 RFID 코드로 해양 대상물을 인증하기 위해 상기 컴퓨터 판독 가능한 매체에 있는 지시; 및
f. 상기 제어기와 연통하고, RFID 스캔된 그리고 시각적으로 인증된 해양 대상물을 우선권 영역으로 이동시키는 복수의 장비 이동 로봇을 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 12 항에 있어서,
전파 센서를 갖는 전파 생성기 및 상기 제어기와 연통하는 시선 카메라 중의 적어도 하나를 더 포함하고, 상기 컴퓨터 판독 가능한 매체는 저장되는 경보, 및 상기 프로세서에 지시하여 상기 저장되는 경보를 자동적으로 제공하여, 장비 이동 로봇이 해양 대상물을 운송할 때 그 장비 이동 로봇이 충돌하는 것을 방지하는 지시를 갖는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
(ⅰ) 상기 상측 목부는 상기 주 갑판으로부터 아래쪽으로 연장되어 있고,
(ⅱ) 상기 상측 절두 원추형 측면부는 상기 중간 목부 위쪽에 위치되고, 운송 깊이에 대한 수선(water line) 위쪽에 또한 부분적으로 작업 깊이에 대한 수선 아래쪽에 유지되며, 상기 상측 절두 원추형 측면부는 상기 상측 목부의 직경으로부터 점진적으로 감소하는 직경을 갖는, 연속적인 수직 관형 취급 및 인상 부양 구조물. - 제 1 항에 있어서,
상기 자동화된 스탠드 구축 시스템은,
a. 상기 주 갑판 위쪽에 연장되어 있는 하중 지지 프레임;
b. (ⅰ) 비구성 해양 라이저, 비구성 케이싱, 및 비구성 시추 파이프를 상승시키고, (ⅱ) 비구성 해양 라이저, 비구성 케이싱, 및 비구성 시추 파이프를 하강시키며, (ⅲ) 구성된 해양 라이저, 구성된 케이싱, 및 구성된 시추 파이프를 상승시키고, 또한 (ⅳ) 구성된 해양 라이저, 구성된 시추 파이프 및 구성된 케이싱을 하강시켜 해양 라이저, 케이싱 및 시추 파이프를 구성하거나 분해하는 스탠드 구축 인양기;
c. 상기 하중 지지 프레임에 부착되는 그래버(grabber); 및
d. 상기 하중 지지 프레임에 부착되어, 구성된 또는 비구성 해양 라이저, 케이싱 또는 시추 파이프에 인장을 가하거나 인장을 해제하는 토크 기계를 포함하는, 연속적인 수직 관형 취급 및 인상 부양 구조물.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/634,718 | 2017-06-27 | ||
| US15/634,718 US10450038B2 (en) | 2017-06-27 | 2017-06-27 | Continuous vertical tubular handling and hoisting buoyant structure |
| PCT/IB2018/054687 WO2019003096A1 (en) | 2017-06-27 | 2018-06-26 | FLOATING LIFTING AND HANDLING STRUCTURE, TUBULAR, VERTICAL AND CONTINUOUS |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200023425A true KR20200023425A (ko) | 2020-03-04 |
| KR102451709B1 KR102451709B1 (ko) | 2022-10-07 |
Family
ID=64741184
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207002494A Active KR102451709B1 (ko) | 2017-06-27 | 2018-06-26 | 연속적인 수직 관형 취급 및 인상 부양 구조물 |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US10450038B2 (ko) |
| EP (1) | EP3645380B1 (ko) |
| KR (1) | KR102451709B1 (ko) |
| CN (1) | CN110997473B (ko) |
| AR (1) | AR112323A1 (ko) |
| CA (1) | CA3067767A1 (ko) |
| DK (1) | DK3645380T3 (ko) |
| ES (1) | ES2937934T3 (ko) |
| MX (1) | MX2020000073A (ko) |
| PH (1) | PH12019502888A1 (ko) |
| RU (1) | RU2757576C2 (ko) |
| SG (1) | SG11201913204SA (ko) |
| TW (1) | TWI762665B (ko) |
| WO (1) | WO2019003096A1 (ko) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10623703B2 (en) | 2018-02-28 | 2020-04-14 | Schlumberger Technology Corporation | CCTV system |
| CN108995778A (zh) * | 2018-08-17 | 2018-12-14 | 招商局重工(江苏)有限公司 | 一种适合在极地冰区及恶劣海况的浮式钻井平台 |
| US11913293B2 (en) | 2019-11-27 | 2024-02-27 | Canrig Robotic Technologies As | Slip wear detection |
| US11492856B2 (en) | 2019-11-29 | 2022-11-08 | Canrig Robotic Technologies As | Inventory system |
| CN113417269A (zh) * | 2021-07-13 | 2021-09-21 | 海洋石油工程(青岛)有限公司 | 一种组合梁结构筋板的安装方法 |
| CN115283708B (zh) * | 2022-07-14 | 2024-06-11 | 沪东中华造船(集团)有限公司 | 一种船舶主机吊装后进行轴系找中镗孔的方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120079447A (ko) * | 2009-11-08 | 2012-07-12 | 에스에스피 테크놀러지스, 인코포레이티드 | 근해 부력식 시추, 생산, 저장 및 하역 구조물 |
| KR20140097179A (ko) * | 2011-10-18 | 2014-08-06 | 토탈 에스에이 | 부유식 해양 설비 및 웰 시추 방법 |
| KR20150134612A (ko) * | 2014-05-22 | 2015-12-02 | 대우조선해양 주식회사 | 작업모드 전환가능 시추리그 및 이를 가지는 시추 구조물 |
| KR20150138384A (ko) * | 2013-04-05 | 2015-12-09 | 케펠 오프쇼어 앤드 마린 테크놀로지 센터 피티이 엘티디. | 시추 동작들을 위한 3중 작업 시스템 |
| WO2016069484A1 (en) * | 2014-10-27 | 2016-05-06 | Jurong Shipyard Pte Ltd. | Buoyant structure |
| KR20170039613A (ko) * | 2013-08-30 | 2017-04-11 | 에스에스피 테크놀러지스, 인코포레이티드 | 석유 시추용 해상 구조물 |
| KR20170045674A (ko) * | 2015-10-19 | 2017-04-27 | 대우조선해양 주식회사 | 해양 플랜트 무인 운영 시스템 및 방법 |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2156635A (en) | 1935-01-17 | 1939-05-02 | Breeze Corp | Bulkhead door |
| US3041639A (en) | 1959-07-06 | 1962-07-03 | Gerald D Atlas | Multiple boat anchorage |
| US3461924A (en) * | 1963-11-12 | 1969-08-19 | Fmc Corp | Method and apparatus for offshore transfer of fluid |
| US3831385A (en) | 1972-06-26 | 1974-08-27 | Chevron Res | Arctic offshore platform |
| US4117691A (en) | 1977-08-11 | 1978-10-03 | Claude Spray | Floating offshore drilling platform |
| US4281615A (en) | 1977-10-31 | 1981-08-04 | Sedco, Inc. | Self-propelled semi-submersible service vessel |
| US4282822A (en) | 1978-03-06 | 1981-08-11 | Robert Jackson | Boat hull anti-fouling shroud |
| US4446808A (en) | 1980-01-29 | 1984-05-08 | Ateliers Et Chantiers De Bretagne A.C.B. | Barge-tug connection apparatus |
| US4549835A (en) | 1983-11-23 | 1985-10-29 | Hitachi Zosen Corporation | Docking apparatus for ships |
| US4640214A (en) | 1985-01-18 | 1987-02-03 | Bruns John H | Modular multi-storage building |
| DK517285D0 (da) * | 1985-11-08 | 1985-11-08 | Dansk Ind Syndikat | Fremgangsmaade og borerig til boring af borehuller |
| US4679517A (en) | 1986-03-27 | 1987-07-14 | The B. F. Goodrich Company | Fender protective structures |
| BR8606370A (pt) | 1986-12-22 | 1988-07-12 | Petroleo Brasileiro Sa | Estrutura flutuante de apoio oceanico fechada |
| US5573353A (en) | 1994-05-24 | 1996-11-12 | J. Ray Mcdermott, S.A. | Vertical reel pipe laying vessel |
| US6766860B2 (en) * | 2002-02-22 | 2004-07-27 | Globalsantafe Corporation | Multi-activity offshore drilling facility having a support for tubular string |
| US7958835B2 (en) | 2007-01-01 | 2011-06-14 | Nagan Srinivasan | Offshore floating production, storage, and off-loading vessel for use in ice-covered and clear water applications |
| CN103847932B (zh) * | 2008-02-15 | 2016-11-23 | 伊特雷科公司 | 海上钻探船 |
| CN101544272A (zh) * | 2008-03-26 | 2009-09-30 | 吴植融 | 液体水下储存、装载和外卸装置 |
| WO2011093718A1 (en) | 2010-01-28 | 2011-08-04 | Odfjell Drilling Technology Ltd. | Platform for controlled containment of hydrocarbons |
| US9352809B2 (en) * | 2010-07-08 | 2016-05-31 | Itrec B.V. | Semi-submersible vessel and operating method |
| EP2741955B1 (en) | 2011-08-09 | 2019-08-28 | Jurong Shipyard Pte. Ltd. | Stable offshore floating depot |
| US20130133563A1 (en) | 2011-11-26 | 2013-05-30 | Stephan Vincent Kroecker | Mono Semi-Submersible Platform |
| GB201201607D0 (en) * | 2012-01-31 | 2012-03-14 | Larkin Brendan | Drilling-pipe handling apparatus and method |
| NL2009676C2 (en) * | 2012-10-22 | 2014-04-23 | Itrec Bv | Semi-submersible arctic waters drilling vessel and method. |
| ITUD20130037A1 (it) * | 2013-03-20 | 2014-09-21 | Fincantieri Cantieri Navali It | "sistema e metodo di movimentazione di elementi tubolari" |
| US9562403B2 (en) * | 2013-04-15 | 2017-02-07 | Seahorse Equipment Corp. | Riser tensioner conductor for dry-tree semisubmersible |
| WO2014182160A2 (en) * | 2013-05-06 | 2014-11-13 | Itrec B.V. | Wellbore drilling system |
| SG11201605693TA (en) | 2013-12-13 | 2016-09-29 | Ssp Technologies Inc | Buoyant structure |
| BR112017018128B1 (pt) | 2015-02-24 | 2023-03-21 | Jurong Shipyard Pte Ltd | Embarcação flutuante |
-
2017
- 2017-06-27 US US15/634,718 patent/US10450038B2/en active Active
-
2018
- 2018-06-26 MX MX2020000073A patent/MX2020000073A/es unknown
- 2018-06-26 RU RU2020102912A patent/RU2757576C2/ru active
- 2018-06-26 TW TW107121870A patent/TWI762665B/zh not_active IP Right Cessation
- 2018-06-26 DK DK18824157.4T patent/DK3645380T3/da active
- 2018-06-26 KR KR1020207002494A patent/KR102451709B1/ko active Active
- 2018-06-26 CN CN201880049925.1A patent/CN110997473B/zh active Active
- 2018-06-26 CA CA3067767A patent/CA3067767A1/en active Pending
- 2018-06-26 ES ES18824157T patent/ES2937934T3/es active Active
- 2018-06-26 EP EP18824157.4A patent/EP3645380B1/en active Active
- 2018-06-26 WO PCT/IB2018/054687 patent/WO2019003096A1/en not_active Ceased
- 2018-06-26 SG SG11201913204SA patent/SG11201913204SA/en unknown
- 2018-06-28 AR ARP180101783 patent/AR112323A1/es active IP Right Grant
-
2019
- 2019-12-20 PH PH12019502888A patent/PH12019502888A1/en unknown
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120079447A (ko) * | 2009-11-08 | 2012-07-12 | 에스에스피 테크놀러지스, 인코포레이티드 | 근해 부력식 시추, 생산, 저장 및 하역 구조물 |
| KR20140097179A (ko) * | 2011-10-18 | 2014-08-06 | 토탈 에스에이 | 부유식 해양 설비 및 웰 시추 방법 |
| KR20150138384A (ko) * | 2013-04-05 | 2015-12-09 | 케펠 오프쇼어 앤드 마린 테크놀로지 센터 피티이 엘티디. | 시추 동작들을 위한 3중 작업 시스템 |
| KR20170039613A (ko) * | 2013-08-30 | 2017-04-11 | 에스에스피 테크놀러지스, 인코포레이티드 | 석유 시추용 해상 구조물 |
| KR20150134612A (ko) * | 2014-05-22 | 2015-12-02 | 대우조선해양 주식회사 | 작업모드 전환가능 시추리그 및 이를 가지는 시추 구조물 |
| WO2016069484A1 (en) * | 2014-10-27 | 2016-05-06 | Jurong Shipyard Pte Ltd. | Buoyant structure |
| KR20170045674A (ko) * | 2015-10-19 | 2017-04-27 | 대우조선해양 주식회사 | 해양 플랜트 무인 운영 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3645380B1 (en) | 2023-01-04 |
| TWI762665B (zh) | 2022-05-01 |
| PH12019502888A1 (en) | 2020-12-07 |
| TW201904815A (zh) | 2019-02-01 |
| US10450038B2 (en) | 2019-10-22 |
| EP3645380A4 (en) | 2021-04-14 |
| RU2020102912A (ru) | 2021-07-27 |
| AR112323A1 (es) | 2019-10-16 |
| DK3645380T3 (da) | 2023-02-27 |
| MX2020000073A (es) | 2020-02-17 |
| KR102451709B1 (ko) | 2022-10-07 |
| CN110997473B (zh) | 2022-03-22 |
| CN110997473A (zh) | 2020-04-10 |
| RU2020102912A3 (ko) | 2021-08-27 |
| CA3067767A1 (en) | 2019-01-03 |
| SG11201913204SA (en) | 2020-01-30 |
| EP3645380A1 (en) | 2020-05-06 |
| US20190016418A1 (en) | 2019-01-17 |
| BR112019027704A2 (pt) | 2020-08-18 |
| WO2019003096A1 (en) | 2019-01-03 |
| RU2757576C2 (ru) | 2021-10-19 |
| ES2937934T3 (es) | 2023-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102451709B1 (ko) | 연속적인 수직 관형 취급 및 인상 부양 구조물 | |
| KR102528209B1 (ko) | 부유 시추기 | |
| EP1984237B1 (en) | Deep water installation vessel | |
| US7934462B2 (en) | Offshore floating structure with motion dampers | |
| US6666624B2 (en) | Floating, modular deepwater platform and method of deployment | |
| EP1808369B1 (en) | Truss semi-submersible floating structure | |
| US5054415A (en) | Mooring/support system for marine structures | |
| KR20120079447A (ko) | 근해 부력식 시추, 생산, 저장 및 하역 구조물 | |
| EP2243695B1 (en) | Mating of buoyant hull structure with truss structure | |
| RU2683920C2 (ru) | Способ использования плавучей морской базы | |
| US20180230662A1 (en) | Self-installing offshore platform | |
| EP3732097B1 (en) | A semi submersible vessel | |
| CA1227380A (en) | Motion compensation means for a floating production system | |
| NO337402B1 (no) | Et flytende skrog med stabilisatorparti | |
| CN120752175A (zh) | 一种用于离岸深水的稳定系统和组件 | |
| WO2003057556A1 (en) | Multifunctional catamaran shape vessel | |
| HK40025435A (en) | Continuous vertical tubular handling and hoisting buoyant structure | |
| HK40025435B (zh) | 连续竖向管件装卸及提升浮力结构 | |
| BR112019027704B1 (pt) | Estrutura flutuante de manuseio e içamento tubular vertical contínuo | |
| WO2025095830A1 (en) | Docking method | |
| KR20150115052A (ko) | 선박 또는 해양구조물의 안벽탑재시스템 및 그 탑재방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200123 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210317 Comment text: Request for Examination of Application |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20220908 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220930 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220930 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |