KR20200024488A - 차량 주차 제어 장치, 그를 포함한 시스템 및 그 방법 - Google Patents
차량 주차 제어 장치, 그를 포함한 시스템 및 그 방법 Download PDFInfo
- Publication number
- KR20200024488A KR20200024488A KR1020180101226A KR20180101226A KR20200024488A KR 20200024488 A KR20200024488 A KR 20200024488A KR 1020180101226 A KR1020180101226 A KR 1020180101226A KR 20180101226 A KR20180101226 A KR 20180101226A KR 20200024488 A KR20200024488 A KR 20200024488A
- Authority
- KR
- South Korea
- Prior art keywords
- parking
- vehicle
- space
- trajectory
- parking space
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0285—Parking performed automatically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0055—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/168—Driving aids for parking, e.g. acoustic or visual feedback on parking space
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0043—Signal treatments, identification of variables or parameters, parameter estimation or state estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
도 2는 본 발명의 일 실시 예에 따른 차량의 센서 모듈의 동작 예시도이다.
도 3은 본 발명의 일 실시 예에 따른 평행 주차 제어 시 주차 위치 결정 기준을 설명하기 위한 예시도이다.
도 4는 본 발명의 일 실시 예에 따른 직각 주차 제어 시 주차 위치 결정 기준을 설명하기 위한 예시도이다.
도 5a는 본 발명의 일 실시 예에 따른 평행 주차 제어 시 제 1 객체 다음 주차 공간을 목표 주차 공간으로 설정하여 주차 제어를 수행하는 방법을 설명하기 위한 도면이다.
도 5b는 본 발명의 일 실시 예에 따른 평행 주차 제어 시 제 2 객체 이전 주차 공간을 목표 주차 공간으로 설정하여 주차 제어를 수행하는 방법을 설명하기 위한 도면이다.
도 6a는 본 발명의 일 실시 예에 따른 직각 주차 제어 시 제 1 객체 다음 주차 공간을 목표 주차 공간으로 설정하여 주차 제어를 수행하는 방법을 설명하기 위한 도면이다.
도 6b는 본 발명의 일 실시 예에 따른 직각 주차 제어 시 제 2 객체 이전 주차 공간을 목표 주차 공간으로 설정하여 주차 제어를 수행하는 방법을 설명하기 위한 도면이다.
도 7은 본 발명의 다른 실시 예에 따른 차량 주차 제어 방법을 설명하기 위한 예시도이다.
도 8은 본 발명의 일 실시 예에 따른 차량 주차 제어 방법을 설명하기 위한 순서도이다.
도 9는 본 발명의 다른 실시 예에 따른 차량 주차 제어 방법을 설명하기 위한 순서도이다.
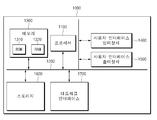
도 10은 본 발명의 일 실시 예에 따른 컴퓨팅 시스템을 도시한다.
Claims (20)
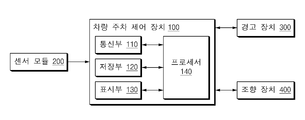
- 제 1 객체와 제 2 객체 사이에 주차 공간이 탐색되면, 상기 주차 공간의 길이 및 자차의 현재 위치에 따라 가상 객체의 생성여부를 판단하고, 상기 가상 객체 생성 시 상기 가상 객체를 기반으로 상기 주차 공간 중 주차 목표 공간을 결정하고, 상기 주차 목표 공간으로 상기 자차가 주차되도록 주차 궤적을 생성하여, 상기 주차 궤적을 기반으로 주차 제어를 수행하는 프로세서; 및
상기 프로세서에 의해 생성된 정보를 저장하는 저장부;
를 포함하는 차량 주차 제어 장치. - 청구항 1에 있어서,
상기 프로세서는,
상기 제 1 객체와 상기 제 2 객체 사이의 주차 공간의 길이가 미리 정한 기준치 보다 작은 경우 상기 탐색된 주차 공간 전체를 상기 주차 목표공간으로 결정하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 1에 있어서,
상기 프로세서는,
상기 제 1 객체와 상기 제 2 객체 사이의 주차 공간의 길이가 미리 정한 기준치 보다 큰 경우, 상기 자차의 현재 위치에서의 주차 제어 시 주차 스텝 수가 가장 적은 객체와 일정 거리 이내에 주차할 수 있도록 상기 주차 공간 중 상기 주차 목표 공간을 결정하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 3에 있어서,
상기 프로세서는,
상기 제 1 객체와 상기 제 2 객체 사이의 주차 공간의 길이가 미리 정한 기준치보다 큰 경우, 상기 주차 공간이 상기 제 1 객체와 인접한 제 1 주차공간과 상기 제 1 주차공간과 상기 제 2 객체 사이에 위치하는 제 2 주차공간을 포함하는 것으로 판단하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 4에 있어서,
상기 프로세서는,
상기 자차의 현재 위치가 상기 제 2 객체 이전에 위치하는 경우, 상기 제 2 주차 공간에 가상 객체를 생성하고 상기 제 1 주차 공간을 상기 주차 목표 공간으로 결정하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 5에 있어서,
상기 프로세서는,
상기 자차의 현재 위치가 상기 제 2 객체 옆 또는 이후에 위치하는 경우, 상기 제 2 주차 공간을 상기 주차 목표 공간으로 결정하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 5에 있어서,
상기 프로세서는,
연석 또는 벽의 존재 유무 및 상기 제 1 객체의 기울기 방향에 따라 상기 가상 객체의 위치를 산출하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 7에 있어서,
상기 프로세서는,
상기 연석 또는 벽이 존재하는 경우,
상기 제 1 객체로부터 연석 또는 벽 방향으로 자차의 전장 또는 전폭만큼 이동한 위치를 상기 가상 객체의 X좌표로 산출하고, 상기 연석 또는 벽의 직교 방향으로 자차의 차폭 또는 전장만큼 이동한 위치를 상기 가상 객체의 Y좌표로 산출하고, 상기 연석 또는 벽의 방향을 이용하여 상기 가상 객체의 각도를 산출하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 7에 있어서,
상기 프로세서는,
상기 연석 또는 벽이 존재하지 않는 경우, 상기 제 1 객체의 기울기를 추출하여 상기 제 1 객체의 각 코너점에서 상기 제 1 객체의 기울기 방향으로 자차의 전장 또는 전폭만큼 이동한 위치를 상기 가상 객체의 X 좌표로 산출하고, 상기 제 1 객체의 기울기 방향으로 상기 제 1 객체의 각 코너점과 동일한 위치를 상기 가상 객체의 Y 좌표로 산출하고, 상기 제 1 객체의 기울기를 이용하여 상기 가상 객체의 각도로 산출하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 7에 있어서,
상기 프로세서는,
상기 상기 연석 또는 벽이 존재하지 않고, 상기 제 1 객체의 기울기를 추출할 수 없는 경우, 상기 제 1 객체의 각 코너점에서부터 자차의 공간 탐색 방향으로 자차의 전장 또는 전폭만큼 이동한 위치를 상기 가상 객체의 X 좌표로 산출하고, 상기 자차의 공간 탐색 방향으로 상기 제 1 객체의 각 코너점과 동일한 위치를 상기 가상 객체의 Y 좌표로 산출하고, 상기 자차의 공간 탐색 방향을 이용하여 상기 가상 객체의 각도를 산출하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 1에 있어서,
상기 프로세서는,
상기 제 1 객체 및 상기 가상 객체를 기반으로 상기 주차 궤적을 생성하는 것을 특징으로 하는 차량 주차 제어 장치. - 청구항 1에 있어서,
상기 프로세서는,
차량의 조향비, 자차의 현재 위치, 및 주차 목표 공간 중 적어도 하나 이상을 이용하여 다수의 주차 궤적을 생성하고, 상기 다수의 주차 궤적 중 상기 제 1 객체 및 상기 제 2 객체와 상기 자차가 충돌하지 않는 궤적을 추출하고, 상기 추출된 궤적 중 경로가 가장 짧은 궤적을 선택하는 것을 특징으로 하는 차량 주차 제어 장치. - 객체 및 주차 공간을 탐색하는 센서 모듈; 및
상기 센서 모듈에 의해 제 1 객체와 제 2 객체 사이의 주차 공간이 탐색되면, 상기 주차 공간의 길이 및 자차의 현재 위치에 따라 가상 객체의 생성여부를 판단하고, 상기 가상 객체 생성 시 상기 가상 객체를 기반으로 상기 주차 공간 중 주차 목표 공간을 결정하고, 상기 주차 목표 공간으로 상기 자차가 주차되도록 주차 궤적을 생성하여, 상기 주차 궤적을 기반으로 주차 제어를 수행하는 차량 주차 제어 장치;
를 포함하는 것을 특징으로 하는 차량 시스템. - 청구항 13에 있어서,
상기 탐색된 객체 및 주차 공간, 상기 주차 궤적을 표시하는 표시부
를 더 포함하는 것을 특징으로 하는 차량 시스템. - 제 1 객체와 제 2 객체 사이의 주차 공간이 탐색되면, 상기 주차 공간의 길이 및 자차의 현재 위치에 따라 가상 객체의 생성여부를 판단하고, 상기 가상 객체를 생성하는 단계;
상기 가상 객체를 기반으로 상기 주차 공간 중 주차 목표 공간을 결정하는 단계;
상기 주차 목표 공간으로 상기 자차가 주차되도록 주차 궤적을 생성하는 단계;
상기 주차 궤적을 기반으로 주차 제어를 수행하는 단계
를 포함하는 것을 특징으로 하는 차량 주차 제어 방법. - 청구항 15에 있어서,
상기 주차 목표 공간을 결정하는 단계는,
상기 제 1 객체와 상기 제 2 객체 사이의 주차 공간의 길이가 미리 정한 기준치 보다 작은 경우 상기 탐색된 주차 공간 전체를 상기 주차 목표공간으로 결정하는 것을 특징으로 하는 차량 주차 제어 방법. - 청구항 15에 있어서,
상기 주차 목표 공간을 결정하는 단계는,
상기 제 1 객체와 상기 제 2 객체 사이의 주차 공간의 길이가 미리 정한 기준치 보다 큰 경우, 상기 자차의 현재 위치에서의 주차 제어 시 주차 스텝 수가 가장 적은 객체와 일정 거리 이내에 주차할 수 있도록 상기 주차 공간 중 상기 주차 목표 공간을 결정하는 것을 특징으로 하는 차량 주차 제어 방법. - 청구항 17에 있어서,
상기 주차 목표 공간을 결정하는 단계는,
상기 제 1 객체와 상기 제 2 객체 사이의 주차 공간의 길이가 미리 정한 기준치보다 큰 경우, 상기 주차 공간이 상기 제 1 객체와 인접한 제 1 주차공간과 상기 제 1 주차공간과 상기 제 2 객체 사이에 위치하는 제 2 주차공간을 포함하는 것으로 판단하는 단계;
상기 자차의 현재 위치가 상기 제 2 객체 이전에 위치하는 경우, 상기 제 2 주차 공간에 가상 객체를 생성하고 상기 제 1 주차 공간을 상기 주차 목표 공간으로 결정하는 단계; 및
상기 자차의 현재 위치가 상기 제 2 객체 옆 또는 이후에 위치하는 경우, 상기 제 2 주차 공간을 상기 주차 목표 공간으로 결정하는 단계
를 포함하는 것을 특징으로 하는 차량 주차 제어 방법. - 청구항 18에 있어서,
상기 가상 객체를 생성하는 단계는,
연석 또는 벽의 존재 유무 및 상기 제 1 객체의 기울기 방향에 따라 상기 가상 객체의 위치를 산출하는 것을 특징으로 하는 차량 주차 제어 방법. - 청구항 19에 있어서,
상기 주차 궤적을 생성하는 단계는,
상기 제 1 객체 및 상기 가상 객체를 기반으로 상기 주차 궤적을 생성하거나,
차량의 조향비, 자차의 현재 위치, 및 주차 목표 공간 중 적어도 하나 이상을 이용하여 다수의 주차 궤적을 생성하고, 상기 다수의 주차 궤적 중 상기 제 1 객체 및 상기 제 2 객체와 상기 자차가 충돌하지 않는 궤적을 추출하고, 상기 추출된 궤적 중 경로가 가장 짧은 궤적을 선택하는 것을 특징으로 하는 차량 주차 제어 방법.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180101226A KR102452556B1 (ko) | 2018-08-28 | 2018-08-28 | 차량 주차 제어 장치, 그를 포함한 시스템 및 그 방법 |
| US16/189,024 US10953870B2 (en) | 2018-08-28 | 2018-11-13 | Apparatus for controlling parking of vehicle, system having the same, and method thereof |
| DE102018220058.0A DE102018220058A1 (de) | 2018-08-28 | 2018-11-22 | Vorrichtung zur Steuerung eines Parkvorgangs eines Fahrzeugs, System mit dieser Vorrichtung und Verfahren dafür |
| CN201811442193.0A CN110861638B (zh) | 2018-08-28 | 2018-11-29 | 用于控制车辆驻车的装置、具有该装置的系统及其方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180101226A KR102452556B1 (ko) | 2018-08-28 | 2018-08-28 | 차량 주차 제어 장치, 그를 포함한 시스템 및 그 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200024488A true KR20200024488A (ko) | 2020-03-09 |
| KR102452556B1 KR102452556B1 (ko) | 2022-10-07 |
Family
ID=69526830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180101226A Active KR102452556B1 (ko) | 2018-08-28 | 2018-08-28 | 차량 주차 제어 장치, 그를 포함한 시스템 및 그 방법 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10953870B2 (ko) |
| KR (1) | KR102452556B1 (ko) |
| CN (1) | CN110861638B (ko) |
| DE (1) | DE102018220058A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210089117A (ko) * | 2020-06-29 | 2021-07-15 | 베이징 바이두 넷컴 사이언스 앤 테크놀로지 코., 엘티디. | 자동 주차 방법 및 장치, 전자 기기, 저장 매체 |
| CN113734152A (zh) * | 2020-05-27 | 2021-12-03 | 佛吉亚歌乐电子有限公司 | 驻车支援装置、以及驻车支援装置的控制方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102589934B1 (ko) * | 2018-09-13 | 2023-10-17 | 현대모비스 주식회사 | 경고 조건 조정 장치 및 방법 |
| JP2020131909A (ja) * | 2019-02-19 | 2020-08-31 | 株式会社デンソー | 情報処理装置および情報処理方法 |
| JP2020157943A (ja) * | 2019-03-27 | 2020-10-01 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7256463B2 (ja) | 2019-10-11 | 2023-04-12 | トヨタ自動車株式会社 | 車両駐車支援装置 |
| US11430333B2 (en) * | 2020-06-10 | 2022-08-30 | Spaces Operations, Llc | Method and system for dynamic mobile data communication |
| JP7576454B2 (ja) * | 2020-12-21 | 2024-10-31 | フォルシアクラリオン・エレクトロニクス株式会社 | 駐車支援装置及び駐車支援方法 |
| JP7522389B2 (ja) * | 2021-01-27 | 2024-07-25 | トヨタ自動車株式会社 | 駐車支援装置 |
| DE102022104437A1 (de) * | 2022-02-24 | 2023-08-24 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Fahrzeugführungssystem zum Einparken eines Fahrzeugs in eine Quer-Parklücke |
| US20230286584A1 (en) * | 2022-03-08 | 2023-09-14 | Ford Global Technologies, Llc | Method for operating a motor vehicle with a parking assistant |
| JP7811066B2 (ja) * | 2022-07-08 | 2026-02-04 | パナソニックオートモーティブシステムズ株式会社 | 情報処理装置および情報処理方法 |
| US12319342B2 (en) * | 2022-12-19 | 2025-06-03 | Ford Global Technologies, Llc | Vehicle steering control |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101583998B1 (ko) * | 2014-10-17 | 2016-01-19 | 현대자동차주식회사 | 주차지원장치 및 방법 |
| JP2017030568A (ja) * | 2015-07-31 | 2017-02-09 | アイシン精機株式会社 | 駐車支援装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007030700A (ja) * | 2005-07-27 | 2007-02-08 | Aisin Seiki Co Ltd | 駐車支援装置 |
| JP4386083B2 (ja) * | 2007-02-27 | 2009-12-16 | トヨタ自動車株式会社 | 駐車支援装置 |
| WO2009060663A1 (ja) * | 2007-11-08 | 2009-05-14 | Bosch Corporation | 駐車支援装置 |
| TWI315271B (en) * | 2007-12-27 | 2009-10-01 | Ind Tech Res Inst | Parking guidance device and method thereof |
| JP5400316B2 (ja) * | 2008-04-07 | 2014-01-29 | 日産自動車株式会社 | 駐車支援装置 |
| DE102008028763A1 (de) * | 2008-06-17 | 2009-12-24 | Valeo Schalter Und Sensoren Gmbh | Verfahren und Vorrichtung zur Unterstützung eines Einparkvorgangs eines Fahrzeugs |
| DE102010040591B4 (de) * | 2010-09-10 | 2020-07-02 | Robert Bosch Gmbh | Einparkassistent zur Unterstützung eines Einparkvorgangs bei einer Mehrzahl vorhandener Parklücken |
| KR101877570B1 (ko) * | 2012-04-04 | 2018-07-11 | 현대자동차주식회사 | Av 영상 기반의 주차위치 설정 장치 및 그 방법 |
| DE102012023706A1 (de) * | 2012-12-05 | 2014-06-05 | Daimler Ag | Fahrzeugseitiges Verfahren und fahrzeugseitige Vorrichtung zum Erfassen und Anzeigen von Parklücken für ein Fahrzeug |
| KR20140085136A (ko) * | 2012-12-27 | 2014-07-07 | 현대자동차주식회사 | 주차조향 보조시스템 |
| KR101480602B1 (ko) * | 2013-04-15 | 2015-01-09 | 현대자동차주식회사 | 주차 지원 장치 및 방법 |
| JP6251940B2 (ja) * | 2014-06-30 | 2017-12-27 | 日立オートモティブシステムズ株式会社 | 駐車軌跡算出装置および駐車軌跡算出方法 |
| US9731765B2 (en) * | 2015-08-12 | 2017-08-15 | Hyundai Motor Company | Parking assist apparatus and method |
| CA3002641C (en) * | 2015-10-22 | 2022-05-17 | Nissan Motor Co., Ltd. | Parking space detection method and device |
| US10185319B2 (en) * | 2015-11-16 | 2019-01-22 | Ford Global Technologies, Llc | Method and device for assisting a parking maneuver |
| KR102005944B1 (ko) * | 2016-10-19 | 2019-08-01 | 주식회사 만도 | 주차 보조 시스템 및 그 제어 방법 |
| KR20180047210A (ko) * | 2016-10-31 | 2018-05-10 | 현대자동차주식회사 | 주차구획 탐색 장치 및 방법 |
-
2018
- 2018-08-28 KR KR1020180101226A patent/KR102452556B1/ko active Active
- 2018-11-13 US US16/189,024 patent/US10953870B2/en active Active
- 2018-11-22 DE DE102018220058.0A patent/DE102018220058A1/de active Pending
- 2018-11-29 CN CN201811442193.0A patent/CN110861638B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101583998B1 (ko) * | 2014-10-17 | 2016-01-19 | 현대자동차주식회사 | 주차지원장치 및 방법 |
| JP2017030568A (ja) * | 2015-07-31 | 2017-02-09 | アイシン精機株式会社 | 駐車支援装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113734152A (zh) * | 2020-05-27 | 2021-12-03 | 佛吉亚歌乐电子有限公司 | 驻车支援装置、以及驻车支援装置的控制方法 |
| KR20210089117A (ko) * | 2020-06-29 | 2021-07-15 | 베이징 바이두 넷컴 사이언스 앤 테크놀로지 코., 엘티디. | 자동 주차 방법 및 장치, 전자 기기, 저장 매체 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102452556B1 (ko) | 2022-10-07 |
| CN110861638B (zh) | 2024-12-24 |
| US20200070814A1 (en) | 2020-03-05 |
| DE102018220058A1 (de) | 2020-03-05 |
| US10953870B2 (en) | 2021-03-23 |
| CN110861638A (zh) | 2020-03-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102452556B1 (ko) | 차량 주차 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| US11173910B2 (en) | Lane change controller for vehicle system including the same, and method thereof | |
| KR102610743B1 (ko) | 차량의 차로 변경 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| KR102727540B1 (ko) | 주차 지원 장치 및 방법 | |
| KR102463740B1 (ko) | 자율주차보조장치 및 그의 주차 지원 방법 | |
| KR102406522B1 (ko) | 기상 환경 기반 군집 주행 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| JP6926976B2 (ja) | 駐車支援装置及びコンピュータプログラム | |
| US11188078B2 (en) | Apparatus for automatically parking vehicle in personal garage, system including the same, and method for the same | |
| CN110794823A (zh) | 预测自动驾驶车辆的对象移动的方法和系统 | |
| KR102869073B1 (ko) | 주차 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| US20240203254A1 (en) | Parking control apparatus for vehicle and method thereof | |
| US11312369B2 (en) | Apparatus for controlling parking of a vehicle, system having the same and method for the same | |
| KR102598953B1 (ko) | 차량 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| CN115649167A (zh) | 一种车辆变道确定方法、装置、电子设备及存储介质 | |
| KR102751266B1 (ko) | 차량 주차 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| JP2024055756A (ja) | 駐車経路を決定する装置及び方法 | |
| KR20220128559A (ko) | 차선 유지 제어 장치, 그를 포함하는 차량 시스템, 및 그 방법 | |
| KR20200119924A (ko) | 군집 주행 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| US20240199003A1 (en) | Parking control device and method thereof | |
| KR20200040090A (ko) | 차량의 주차 관리 장치 및 방법 | |
| KR20200055166A (ko) | 차량 군집 주행 제어 장치, 그를 포함한 시스템 및 그 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |