KR20200028954A - 급유 장치 - Google Patents
급유 장치 Download PDFInfo
- Publication number
- KR20200028954A KR20200028954A KR1020207001700A KR20207001700A KR20200028954A KR 20200028954 A KR20200028954 A KR 20200028954A KR 1020207001700 A KR1020207001700 A KR 1020207001700A KR 20207001700 A KR20207001700 A KR 20207001700A KR 20200028954 A KR20200028954 A KR 20200028954A
- Authority
- KR
- South Korea
- Prior art keywords
- roll angle
- refueling
- refueling device
- roll
- oil supply
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D39/00—Refuelling during flight
- B64D39/06—Connecting hose to aircraft; Disconnecting hose therefrom
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D39/00—Refuelling during flight
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C5/00—Stabilising surfaces
- B64C5/06—Fins
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
- B64C9/32—Air braking surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D39/00—Refuelling during flight
- B64D39/04—Adaptations of hose construction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L27/00—Adjustable joints; Joints allowing movement
- F16L27/02—Universal joints, i.e. with mechanical connection allowing angular movement or adjustment of the axes of the parts in any direction
- F16L27/04—Universal joints, i.e. with mechanical connection allowing angular movement or adjustment of the axes of the parts in any direction with partly-spherical engaging surfaces
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/36—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential
- G05B11/42—Automatic controllers electric with provision for obtaining particular characteristics, e.g. proportional, integral, differential for obtaining a characteristic which is both proportional and time-dependent, e.g. P. I., P. I. D.
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
- B64C2009/005—Ailerons
-
- B64C2201/12—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/25—Fixed-wing aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Loading And Unloading Of Fuel Tanks Or Ships (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
Description
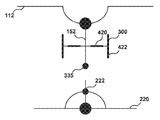
도 1과 도 2에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따라 비행 동안 항공기에 급유하기 위한 다수의 급유 장치들이 있는 탱커 시스템(tanker system; 급유기 시스템)이 도시되어 있다.
도 3에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따르는 급유 장치가 도시되어 있다.
도 4에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따라 급유 장치의 롤 각도를 제어하기 위한 컨트롤러를 포함하는 시스템의 블록 다이어그램이 도시되어 있다.
도 5에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따라 급유 장치의 롤 각도를 제어하기 위한 컨트롤러의 일부인 기능성 모듈들이 도시되어 있다.
도 6에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따라 급유 장치의 롤 각도를 제어하기 위한 컨트롤러의 구현예가 도시되어 있다.
도 7에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따라 급유 장치를 제어하기 위한 방법에 관한 흐름도가 도시되어 있다.
도 8과 도 9에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따르는 급유 과정의 다양한 단계들 동안 존재하는 힘들 중 일부가 도시되어 있다.
도 10 내지 도 13에는 본 명세서에 개시되어 있는 발명의 특정 예시들에 따르는 급유 과정의 다양한 단계들 동안의 급유 장치가 도시되어 있다.
Claims (29)
- (a) 단계와 (b) 단계를 구비하는 급유 장치를 제어하는 컴퓨터화 방법으로서, 상기 방법은:
(a) 비경질 호스를 이용하여 급유기에 부착되어 있는 급유 장치를 제공하는 단계로서, 급유 장치는 조인트에 의해 급유 노즐에 연결되어 있는 급유 장치 바디를 가지고, 조인트는 맞물려 있는 상태를 조성하도록 급유 노즐이 피급유기의 리셉터클과 맞물려 있는 경우 급유 노즐에 대한 급유 장치 바디의 자유도를 적어도 수월하게 하는, 단계;
(b) 컨트롤러에 의해 (b1) 단계 내지 (b6) 단계를 반복적으로 수행하는 단계로서,
급유 장치가 맞물려 있지 않는 상태를 조성하도록 피급유기와 맞물려 있지 않는 실례에서는:
(b1) 급유기로부터 급유기의 제 1 롤 각도를 수신하는 단계;
(b2) 급유기의 제 1 롤 각도에 기초하여 급유 장치의 원하는 제 1 롤 각도를 결정하는 단계; 및
(b3) 급유 장치의 하나 이상의 롤링 요소들을 제어하기 위하여 급유 장치의 원하는 제 1 롤 각도와 관련된 하나 이상의 제 1 명령들을 제공하는 단계로서, 이로써 급유기의 제 1 롤 각도와 실질적으로 동일한 급유 장치의 제 1 롤 각도를 달성하거나 유지하려고 시도할 수 있는, 단계;
를 반복적으로 수행하고,
급유 장치가 상기 맞물려 있는 상태로 피급유기와 맞물려 있는 실례에서는:
(b4) 급유기로부터 급유기의 제 2 롤 각도를 수신하는 단계;
(b5) 급유기의 제 2 롤 각도에 기초하여 급유 장치의 원하는 제 2 롤 각도를 결정하는 단계; 및
(b6) 급유 장치의 하나 이상의 요잉 요소들을 제어하기 위하여 급유 장치의 원하는 제 2 롤 각도와 관련된 하나 이상의 제 2 명령들을 제공하는 단계로서, 이로써 급유기의 제 2 롤 각도와 실질적으로 동일한 급유 장치의 제 2 롤 각도를 달성하거나 유지하려고 시도할 수 있고, 급유 장치의 제 2 롤 각도는 맞물려 있는 상태 동안 급유 장치 바디와 급유 노즐 사이의 자유도 때문에 적어도 수월하게 되는, 단계;
를 반복적으로 수행하는, 단계;
를 구비하는 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항에 있어서,
상기 단계(b3)는:
급유 장치의 상기 하나 이상의 요잉 요소들을 제어하기 위하여 급유 장치의 원하는 제 1 롤 각도와 관련된 하나 이상의 제 1 명령들을 제공하는 단계:
를 추가로 구비하고,
상기 단계(b6)는:
급유 장치의 상기 하나 이상의 롤링 요소들을 제어하기 위하여 급유 장치의 원하는 제 2 롤 각도와 관련된 하나 이상의 제 2 명령들을 제공하는 단계;
를 추가로 구비하고, 이로써 상기 급유 장치가 상기 맞물려 있지 않는 상태에 있는지 또는 상기 맞물려 있는 상태에 있는지 여부와 무관하게 하나 이상의 롤링 요소들과 하나 이상의 요잉 요소들 양자 모두에 대해 하나 이상의 명령들을 매끄럽게 제공하는 단계;
를 추가로 구비하는 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 또는 제 2 항에 있어서,
하나 이상의 롤링 요소들 및/또는 하나 이상의 요잉 요소들에 대해 제공되는 하나 이상의 제 1 명령들 및/또는 하나 이상의 제 2 명령들에 영향을 미치고 이로써 원하는 제 1 롤 각도 및/또는 원하는 제 2 롤 각도를 달성하려고 시도하는 경우 하나 이상의 롤링 요소들 및/또는 하나 이상의 요잉 요소들이 가지는 효과를 수정하기 위해서, 게인 캘리브레이션을 수행하는 단계;를 추가로 구비하는 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 단계(b2)는:
급유 장치의 제 1 롤 각도를 수신하는 단계; 및 급유 장치의 제 1 롤 각도와 원하는 제 1 롤 각도 사이의 제 1 차이를 결정하는 단계; 및 상기 하나 이상의 제 1 명령들을 제공하기 위하여 상기 제 1 차이를 활용하는 단계;
를 추가로 구비하고,
상기 단계(b5)는:
급유 장치의 제 2 롤 각도를 수신하는 단계; 및 급유 장치의 제 2 롤 각도와 원하는 제 2 롤 각도 사이의 제 2 차이를 결정하는 단계; 및 상기 하나 이상의 제 2 명령들을 제공하기 위하여 상기 제 2 차이를 활용하는 단계;
를 추가로 구비하는 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
급유기의 롤 각도와 실질적으로 동일한 급유 장치의 롤 각도를 달성하거나 유지하려고 시도하기 위해서 하나 이상의 제 1 명령들 및/또는 하나 이상의 제 2 명령들에 기초하여 하나 이상의 롤링 요소들 및/또는 하나 이상의 요잉 요소들을 제어하는 단계;를 추가로 구비하는 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 단계(b2) 및/또는 상기 단계(b5)는:
급유 장치와 급유기의 상대적인 포지션을 구하는 단계;
급유기의 속도를 구하는 단계; 및
급유기의 속도 및 급유 장치와 급유기의 상대적인 포지션에 기초하여 급유기에 대한 급유 장치의 측면 속도를 결정하는 단계로서, 급유기에 대한 급유 장치의 측면 속도는 급유 장치의 진동(oscillation)을 방지하거나 줄이도록 이용되고, 이로써 급유기의 롤 각도와 실질적으로 동일한 급유 장치의 롤 각도를 달성하거나 유지하는데 도움이 되도록 이용되는, 단계;
를 추가로 구비하는 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 단계(b2) 및/또는 상기 단계(b5)는, 급유 장치의 롤 레이트(roll rate)를 구하는 단계를 추가로 구비하고,
롤 레이트는 급유 장치의 진동을 방지하거나 줄이도록 이용되고, 이로써 급유기의 롤 각도와 실질적으로 동일한 급유 장치의 롤 각도를 달성하거나 유지하는데 도움이 되도록 이용되는 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
급유 장치는 무인항공기(unmanned aerial vehicle; UAV)인 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 8 항 중 어느 한 항에 있어서,
급유기는 UAV인 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
피급유기는 UAV인 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
조인트는 구 형상의 조인트인 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 11 항 중 어느 한 항에 있어서,
컨트롤러는 비례 적분(Proportional Integral; PI) 컨트롤러인 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 12 항 중 어느 한 항에 있어서,
하나 이상의 롤링 요소들은 하나 이상의 에일러론들인 것을 특징으로 하는 컴퓨터화 방법. - 제 1 항 내지 제 13 항 중 어느 한 항에 있어서,
하나 이상의 요잉 요소들은 하나 이상의 러더들인 것을 특징으로 하는 컴퓨터화 방법. - 비행중 급유 시스템으로서, 상기 시스템은:
비경질 호스를 이용하여 급유기에 부착되어 있는 급유 장치로서, 급유 장치는 조인트에 의해 급유 노즐에 연결되어 있는 급유 장치 바디를 가지고, 조인트는 맞물려 있는 상태를 조성하도록 급유 노즐이 피급유기의 리셉터클과 맞물려 있는 경우 급유 노즐에 대한 급유 장치 바디의 자유도를 적어도 수월하게 하는, 급유 장치;
급유기의 롤 각도를 결정하도록 구성되어 있는 센서; 및
다음에 오는 (1) 단계 내지 (6) 단계를 반복적으로 수행하도록 구성되어 있는 컨트롤러로서,
급유 장치가 맞물려 있지 않는 상태를 조성하도록 피급유기와 맞물려 있지 않는 경우에는:
(1) 급유기로부터 급유기의 제 1 롤 각도를 수신하는 단계;
(2) 급유기의 제 1 롤 각도에 기초하여 급유 장치의 원하는 제 1 롤 각도를 결정하는 단계; 및
(3) 급유 장치의 하나 이상의 롤링 요소들을 제어하기 위해서 급유 장치의 원하는 제 1 롤 각도와 관련된 하나 이상의 제 1 명령들을 제공하는 단계로서, 이로써 급유기의 제 1 롤 각도와 실질적으로 동일한 급유 장치의 제 1 롤 각도를 달성하거나 유지하려고 시도할 수 있는, 단계;
를 반복적으로 수행하고,
급유 장치가 상기 맞물려 있는 상태로 피급유기와 맞물려 있는 경우에는:
(4) 급유기로부터 급유기의 제 2 롤 각도를 수신하는 단계;
(5) 급유기의 제 2 롤 각도에 기초하여 급유 장치의 원하는 제 2 롤 각도를 결정하는 단계; 및
(6) 급유 장치의 하나 이상의 요잉 요소들을 제어하기 위해서 급유 장치의 원하는 제 2 롤 각도와 관련된 하나 이상의 제 2 명령들을 제공하는 단계로서, 이로써 급유기의 제 2 롤 각도와 실질적으로 동일한 급유 장치의 제 2 롤 각도를 달성하거나 유지하려고 시도할 수 있고, 급유 장치의 제 2 롤 각도는 맞물려 있는 상태 동안 급유 장치 바디와 급유 노즐 사이의 자유도 때문에 적어도 수월하게 되는, 단계;
를 반복적으로 수행하는, 컨트롤러;
를 구비하는 것을 특징으로 하는 시스템. - 제 15 항에 있어서,
컨트롤러는:
급유 장치가 상기 맞물려 있지 않는 상태에 있는 경우에는:
급유 장치의 상기 하나 이상의 요잉 요소들을 제어하기 위해서 급유 장치의 원하는 제 1 롤 각도와 관련된 하나 이상의 제 1 명령들을 제공하도록 추가로 구성되어 있고;
급유 장치가 상기 맞물려 있는 상태에 있는 경우에는:
급유 장치의 상기 하나 이상의 롤링 요소들을 제어하기 위해서 급유 장치의 원하는 제 2 롤 각도와 관련된 하나 이상의 제 2 명령들을 제공하도록 추가로 구성되어 있고;
이로써 상기 급유 장치가 상기 맞물려 있지 않는 상태에 있는지 또는 상기 맞물려 있는 상태에 있는지 여부와 무관하게 하나 이상의 롤링 요소들과 하나 이상의 요잉 요소들 양자 모두에 대해 하나 이상의 명령들이 제공되는 것을 특징으로 하는 시스템. - 제 15 항 또는 제 16 항에 있어서,
컨트롤러는, 하나 이상의 롤링 요소들 및/또는 하나 이상의 요잉 요소들에 대한 하나 이상의 제 1 명령들 및/또는 하나 이상의 제 2 명령들에 영향을 미치고 이로써 원하는 제 1 롤 각도 및/또는 원하는 제 2 롤 각도를 달성하려고 시도하는 경우 하나 이상의 롤링 요소들 및/또는 하나 이상의 요잉 요소들이 가지는 효과를 수정하기 위해서, 게인 캘리브레이션을 수행하도록 추가로 구성되어 있는 것을 특징으로 하는 시스템. - 제 15 항 내지 제 17 항 중 어느 한 항에 있어서,
급유 장치의 롤 각도를 결정하도록 구성되어 있는 센서;를 추가로 구비하고,
컨트롤러는: 급유 장치의 결정된 롤 각도를 구하도록 추가로 구성되어 있고;
급유 장치가 상기 맞물려 있지 않는 상태에 있는 경우에는:
급유 장치의 구해진 롤 각도와 원하는 제 1 롤 각도 사이의 제 1 차이를 결정하도록 추가로 구성되어 있고, 상기 하나 이상의 제 1 명령들을 제공하기 위하여 상기 결정된 제 1 차이를 활용하도록 추가로 구성되어 있고;
급유 장치가 상기 맞물려 있는 상태에 있는 경우에는:
급유 장치의 구해진 롤 각도와 원하는 제 2 롤 각도 사이의 제 2 차이를 결정하도록 추가로 구성되어 있고, 상기 하나 이상의 제 2 명령들을 제공하기 위하여 상기 결정된 제 2 차이를 활용하도록 추가로 구성되어 있는;
것을 특징으로 하는 시스템. - 제 15 항 내지 제 18 항 중 어느 한 항에 있어서,
급유기의 롤 각도와 실질적으로 동일한 급유 장치의 롤 각도를 달성하거나 유지하기 위해서 하나 이상의 제 1 명령들 및/또는 제 2 명령들에 기초하여 하나 이상의 롤링 요소들과 하나 이상의 요잉 요소들을 제어하도록 구성되어 있는 조향 제어 모듈을 추가로 구비하는 것을 특징으로 하는 시스템. - 제 15 항 내지 제 19 항 중 어느 한 항에 있어서,
급유기의 속도를 결정하도록 구성되어 있는 속도 센서;를 추가로 구비하고,
컨트롤러는:
급유 장치와 급유기의 상대적인 포지션을 구하도록 추가로 구성되어 있고;
급유기의 속도를 구하도록 추가로 구성되어 있고; 그리고
급유기의 속도 및 급유 장치와 급유기의 상대적인 포지션에 기초하여 급유기에 대한 급유 장치의 측면 속도를 결정하도록 추가로 구성되어 있되, 급유기에 대한 급유 장치의 측면 속도는 급유 장치의 진동을 방지하거나 줄이도록 이용되고, 이로써 급유기의 롤 각도와 실질적으로 동일한 급유 장치의 롤 각도를 달성하거나 유지하는데 도움이 되도록 이용되는;
것을 특징으로 하는 시스템. - 제 15 항 내지 제 20 항 중 어느 한 항에 있어서,
급유 장치의 롤 레이트를 결정하도록 구성되어 있는 롤 레이트 센서를 추가로 구비하고,
롤 레이트는 급유 장치의 진동을 방지하거나 줄이도록 이용되고, 이로써 급유기의 롤 각도와 실질적으로 동일한 급유 장치의 롤 각도를 달성하거나 유지하는데 도움이 되도록 이용되는 것을 특징으로 하는 시스템. - 제 15 항 내지 제 21 항 중 어느 한 항에 있어서,
급유 장치는 무인항공기(unmanned aerial vehicle; UAV)인 것을 특징으로 하는 시스템. - 제 15 항 내지 제 22 항 중 어느 한 항에 있어서,
급유기는 UAV인 것을 특징으로 하는 시스템. - 제 15 항 내지 제 23 항 중 어느 한 항에 있어서,
피급유기는 UAV인 것을 특징으로 하는 시스템. - 제 15 항 내지 제 24 항 중 어느 한 항에 있어서,
조인트는 구 형상의 조인트인 것을 특징으로 하는 시스템. - 제 15 항 내지 제 25 항 중 어느 한 항에 있어서,
컨트롤러는 비례 적분(Proportional Integral; PI) 컨트롤러인 것을 특징으로 하는 시스템. - 제 15 항 내지 제 26 항 중 어느 한 항에 있어서,
하나 이상의 롤링 요소들은 하나 이상의 에일러론들인 것을 특징으로 하는 시스템. - 제 15 항 내지 제 27 항 중 어느 한 항에 있어서,
하나 이상의 롤링 요소들은 하나 이상의 에일러론들인 것을 특징으로 하는 시스템. - 제 1 항 내지 제 14 항 중 어느 한 항에 따르는 급유 장치를 제어하는 방법을 수행하기 위해서 머신에 의해 실행가능한 지시들로 된 프로그램을 촉지가능하게 구체화하는 것을 특징으로 하는, 머신에 의해 판독가능한 비-일시적 프로그램 저장 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IL253407 | 2017-07-10 | ||
| IL253407A IL253407B (en) | 2017-07-10 | 2017-07-10 | refueling station |
| PCT/IL2018/050742 WO2019012523A1 (en) | 2017-07-10 | 2018-07-08 | FUEL REFUELING DEVICE |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200028954A true KR20200028954A (ko) | 2020-03-17 |
| KR102730131B1 KR102730131B1 (ko) | 2024-11-15 |
Family
ID=60942713
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207001700A Active KR102730131B1 (ko) | 2017-07-10 | 2018-07-08 | 급유 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11465768B2 (ko) |
| EP (1) | EP3652071B1 (ko) |
| KR (1) | KR102730131B1 (ko) |
| IL (1) | IL253407B (ko) |
| SG (1) | SG11201912391TA (ko) |
| WO (1) | WO2019012523A1 (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11618563B2 (en) * | 2019-09-08 | 2023-04-04 | Deere & Company | Self-aligning liquid coupler systems and related methods |
| CN110908278B (zh) * | 2019-11-12 | 2021-05-25 | 北京航空航天大学 | 一种折叠翼飞行器的动力学建模与稳定控制方法 |
| CN111007869A (zh) * | 2019-11-20 | 2020-04-14 | 中国航空工业集团公司沈阳飞机设计研究所 | 一种给定航迹方位角自动控制方法 |
| CN111258231B (zh) * | 2020-01-20 | 2021-03-30 | 北京航空航天大学 | 仿猛禽视觉导航的自主空中加油对接半物理系统及其方法 |
| IL274804B2 (en) * | 2020-05-20 | 2023-05-01 | Israel Aerospace Ind Ltd | A device for refueling aerial vehicles |
| IL276321B2 (en) * | 2020-07-27 | 2024-12-01 | Israel Aerospace Ind Ltd | Refueling device |
| US11866192B2 (en) * | 2021-04-29 | 2024-01-09 | Sky Launch Corporation | System and method for reconnectably coupling an AFT vehicle to a forward vehicle in flight |
| US11358730B1 (en) | 2021-11-12 | 2022-06-14 | Beta Air, Llc | Systems and methods for an aircraft motion observer in an electric aircraft |
| US20250046195A1 (en) * | 2023-08-01 | 2025-02-06 | Raziel Ella | System for generating unique navigational input for an air-borne vehicle, and a method tehreof |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013102903A2 (en) * | 2012-01-04 | 2013-07-11 | Israel Aerospace Industries Ltd. | Devices, systems and methods for refueling air vehicles |
| KR20140113896A (ko) * | 2011-07-22 | 2014-09-25 | 카렐턴 라이프 서포트 시스템즈, 아이엔씨 | 공중 급유 시스템, 장치 및 방법 |
Family Cites Families (112)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2582609A (en) | 1949-03-30 | 1952-01-15 | Curtiss Wright Corp | Means for fueling aircraft in flight |
| GB781059A (en) | 1952-12-08 | 1957-08-14 | Baynes Aircraft Interiors Ltd | Improvements relating to winged aerial targets |
| US2879017A (en) | 1955-01-25 | 1959-03-24 | Flight Refueling Inc | Apparatus for interconnecting aircraft in flight |
| US2954190A (en) | 1955-03-07 | 1960-09-27 | Parker Hannifin Corp | Hose reel and control mechanism therefor |
| US3091419A (en) | 1957-01-14 | 1963-05-28 | Schulz Tool & Mfg Co | Aircraft in-flight refueling system |
| US3059895A (en) | 1957-05-31 | 1962-10-23 | Parker Hannifin Corp | Probe terminal assembly for in-flight re-fueling |
| US2941761A (en) | 1957-08-22 | 1960-06-21 | Textron Inc | Guidance system for aerial refueling |
| US3038632A (en) | 1958-05-22 | 1962-06-12 | Parker Hannifin Corp | Closure device for tanks |
| US3144954A (en) | 1958-05-22 | 1964-08-18 | Parker Hannifin Corp | Closure device for tanks |
| US3076525A (en) | 1960-04-11 | 1963-02-05 | Parker Hannifin Corp | Pulse lubricator |
| GB1085040A (en) | 1964-12-03 | 1967-09-27 | Parker Hannifin Corp | Ship to ship refueling device |
| US3547402A (en) | 1966-05-17 | 1970-12-15 | Parker Hannifin Corp | Compensated quick-disconnect device |
| US3391817A (en) | 1967-07-19 | 1968-07-09 | Shaw Aero Devices Inc | Filler cap |
| US3587618A (en) | 1969-08-14 | 1971-06-28 | Parker Hannifin Corp | Aircraft fuel tank inerting system |
| US3830307A (en) | 1970-05-11 | 1974-08-20 | Parker Hannifin Corp | Fire prevention and/or suppression system |
| US3693915A (en) | 1971-01-28 | 1972-09-26 | Parker Hannifin Corp | Inerting system for fuel tanks and the like |
| US3710549A (en) | 1971-01-29 | 1973-01-16 | Parker Hannifin Corp | Fuel tank inerting system |
| US3691730A (en) | 1971-05-18 | 1972-09-19 | Parker Hannifin Corp | Fuel tank inerting system |
| US3747873A (en) | 1971-11-19 | 1973-07-24 | Susquehanna Corp | Tow cable assembly |
| US3788040A (en) | 1972-06-09 | 1974-01-29 | Parker Hannifin Corp | Fuel tank inerting system |
| DE2445938A1 (de) | 1974-09-26 | 1976-04-29 | Dornier Gmbh | Schleppkoerper zur darstellung von luftzielen |
| US3948626A (en) | 1974-10-25 | 1976-04-06 | Parker-Hannifin Corporation | Refueling equipment for aircraft fuel tanks and the like |
| US3954123A (en) | 1974-12-09 | 1976-05-04 | Duckworth Jr Milton D | Aircraft lavatory drain plug |
| US4228246A (en) | 1975-11-26 | 1980-10-14 | Allied Chemical Corporation | Manufacture of fluorocarbon expanded polystyrene |
| US4072283A (en) | 1976-12-17 | 1978-02-07 | The Boeing Company | Aerial refueling boom articulation |
| US4098427A (en) | 1977-03-17 | 1978-07-04 | Duckworth Jr Milton Donald | Sealing cap assembly for aircraft lavatory drain port |
| US4126162A (en) | 1977-06-06 | 1978-11-21 | Parker-Hannifin Corporation | Aerial refueling device |
| US4129270A (en) | 1977-06-13 | 1978-12-12 | The Boeing Company | Air refueling boom pivot gimbal arrangements |
| US4231536A (en) | 1977-10-11 | 1980-11-04 | The Boeing Company | Airfoil for controlling refueling boom |
| US4157976A (en) | 1977-12-27 | 1979-06-12 | Allied Chemical Corporation | Constant boiling mixtures of 1,1,1,2-tetrafluorochloroethane and chlorofluoromethane |
| US4189059A (en) | 1978-07-10 | 1980-02-19 | Shaw Aero Devices, Inc. | Sealing mechanism for aircraft fuel tank cap |
| US4282909A (en) | 1979-02-05 | 1981-08-11 | Parker-Hannifin Corporation | Aerial refueling device |
| US4586683A (en) | 1979-03-12 | 1986-05-06 | Mcdonnell Douglas Corporation | Rolling aerial refueling boom |
| US4294203A (en) | 1979-09-10 | 1981-10-13 | Cummins Engine Company, Inc. | Internal combustion engine with integral upper cylinder section and head |
| US4295617A (en) | 1979-10-02 | 1981-10-20 | The United States Of America As Represented By The Secretary Of The Army | Selectable drag brakes for rocket range control |
| US4467937A (en) | 1980-04-24 | 1984-08-28 | Shaw Aero Devices, Inc. | Filler cap assembly |
| US4366669A (en) | 1981-02-20 | 1983-01-04 | Shaw Aero Devices, Inc. | Tank closure apparatus with safety feature |
| US4377243A (en) | 1981-10-30 | 1983-03-22 | Shaw Aero Devices, Inc. | Lock for fuel tank cover |
| USD274548S (en) | 1981-11-05 | 1984-07-03 | Shaw Aero Devices, Inc. | Combined cap and adapter ring for a fuel tank |
| US4607313A (en) | 1983-07-15 | 1986-08-19 | Shaw Aero Devices, Inc. | Static discharger |
| USD275512S (en) | 1983-12-15 | 1984-09-11 | Shaw Aero Devices, Inc. | Fuel tank cap |
| USD275984S (en) | 1983-12-15 | 1984-10-16 | Shaw Aero Devices, Inc. | Fuel tank cap adaptor ring |
| US4830673A (en) | 1986-10-03 | 1989-05-16 | E.C.C. America Inc. | Method for reducing the abrasion of calcined clay |
| US4806167A (en) | 1986-10-14 | 1989-02-21 | E.C.C. America Inc. | Kaolin aggregation using combination of organic and inorganic bases |
| GB8725314D0 (en) | 1987-10-29 | 1987-12-02 | Bpb Industries Plc | Floor system |
| US5258931A (en) | 1988-07-08 | 1993-11-02 | Parker-Hannifin Corporation | Precision electronic absolute and relative position sensing device and method of using same |
| EP0426733A1 (en) | 1988-07-28 | 1991-05-15 | British Airways Plc | Transaction recording apparatus |
| GB2237251A (en) | 1989-10-27 | 1991-05-01 | Plessey Co Plc | In-flight refueling apparatus |
| US5246131A (en) | 1990-10-29 | 1993-09-21 | Shaw Aero Devices, Inc. | Positive lift pin for aircraft drain valve |
| US5326052A (en) | 1991-10-02 | 1994-07-05 | Enig Associates, Inc. | Controllable hose-and-drogue in-flight refueling system |
| US5167340A (en) | 1992-04-13 | 1992-12-01 | Shaw Aero Devices, Inc. | Fuel cap with a molded seal |
| FR2705082B1 (fr) | 1993-05-12 | 1995-08-04 | Aerospatiale | Système de ravitaillement en vol. |
| US5541405A (en) | 1994-07-27 | 1996-07-30 | Parker-Hannifin Corporation | Method and device for continuous pattern sensing using fiber optics |
| GB2303024B (en) | 1995-07-01 | 2000-04-12 | Motorola Ltd | Method for determining handover in a multicellular communications system |
| GB9514508D0 (en) | 1995-07-15 | 1995-09-13 | Grau Ltd | Anti-skid brake system |
| GB2304498B (en) | 1995-08-21 | 1999-09-22 | Motorola Ltd | Control means and method for mobile communications |
| US5785276A (en) | 1995-12-22 | 1998-07-28 | The Boeing Company | Actuated roll axis aerial refueling boom |
| GB2313740B (en) | 1996-05-30 | 2000-08-02 | Motorola Ltd | Handover management system for cellular network |
| US5781151A (en) | 1996-09-19 | 1998-07-14 | Parker-Hannifin Corporation | Interferometric trajectory reconstruction technique for flight inspection of radio navigation aids |
| GB2318252A (en) | 1996-10-09 | 1998-04-15 | Motorola Ltd | Channel Allocation in a Cellular Radio Network |
| GB2320646B (en) | 1996-10-18 | 2001-04-11 | Motorola Ltd | Mobile telephone systems |
| US5906336A (en) | 1997-11-14 | 1999-05-25 | Eckstein; Donald | Method and apparatus for temporarily interconnecting an unmanned aerial vehicle |
| GB9903831D0 (en) | 1999-02-22 | 1999-04-14 | Jones Philip D | "FERS"Flight emergency restraint system |
| USD439876S1 (en) | 1999-04-22 | 2001-04-03 | Zakrytoe Actsionernoe Obshchestvo “Otdelenie morskikh sistem OKB im. P.O. Sukhogo” | Supersonic aircraft with in-flight refueling system |
| US6348087B1 (en) | 2000-01-10 | 2002-02-19 | Shaw Aero Devices, Inc. | Three phase cyclonic separator |
| DE10013751A1 (de) | 2000-03-20 | 2001-10-11 | Schmidt Schieferstein Herrmann | Universelles Luftbetankungssystem |
| GB2364207B (en) | 2000-06-30 | 2004-03-03 | Motorola Inc | Radio access traffic management |
| US6604711B1 (en) | 2000-11-20 | 2003-08-12 | Sargent Fletcher, Inc. | Autonomous system for the aerial refueling or decontamination of unmanned airborne vehicles |
| GB0100968D0 (en) | 2001-01-13 | 2001-02-28 | Bae Systems Plc | A drogue for in-flight refuelling |
| US20030136874A1 (en) | 2001-12-10 | 2003-07-24 | Gjerdrum David Michael | Method for safer mid-air refueling |
| US6729359B2 (en) | 2002-06-28 | 2004-05-04 | Shaw Aero Devices, Inc. | Modular on-board inert gas generating system |
| AU2003244817B2 (en) | 2002-06-28 | 2010-08-26 | Domantis Limited | Antigen-binding immunoglobulin single variable domains and dual-specific constructs |
| US6926049B1 (en) | 2002-08-23 | 2005-08-09 | Uav Refueling Inc. | Hose-and-drogue in-flight refueling system |
| US7048231B2 (en) | 2002-10-04 | 2006-05-23 | Shaw Aero Devices, Inc. | Increasing the performance of aircraft on-board inert gas generating systems by turbocharging |
| US6739359B2 (en) | 2002-10-04 | 2004-05-25 | Shaw Aero Devices, Inc. | On-board inert gas generating system optimization by pressure scheduling |
| US6644594B1 (en) * | 2002-11-12 | 2003-11-11 | The United States Of America As Represented By The Secretary Of The Air Force | Flight refueling guide |
| US6819982B2 (en) | 2002-11-26 | 2004-11-16 | The Boeing Company | Uninhabited airborne vehicle in-flight refueling system |
| US6997013B2 (en) | 2003-03-07 | 2006-02-14 | Shaw Aero Devices, Inc | Cooling system for an on-board inert gas generating system |
| US6997434B2 (en) | 2003-05-07 | 2006-02-14 | Shaw Aero Devices, Inc. | Twist cam valve |
| US6994294B2 (en) | 2003-08-29 | 2006-02-07 | Smiths Aerospace, Inc. | Stabilization of a drogue body |
| US20050166983A1 (en) | 2004-02-03 | 2005-08-04 | Shaw James R. | Flush mounted waste disposal service panel assembly |
| US7021586B2 (en) | 2004-02-19 | 2006-04-04 | The Boeing Company | Force feedback refueling system for unmanned aircraft |
| US7172156B1 (en) | 2004-03-16 | 2007-02-06 | Shaw Aero Devices, Inc. | Increasing the performance of aircraft on-board inert gas generating systems by turbocharging |
| US7013905B2 (en) | 2004-04-14 | 2006-03-21 | Shaw Aero Devices, Inc. | System and method for monitoring the performance of an inert gas distribution system |
| US7028947B2 (en) | 2004-04-30 | 2006-04-18 | Mlho, Inc. | Self-powered tethered decoy for heat-seeking transport aircraft missile defense |
| US7093801B2 (en) | 2004-05-28 | 2006-08-22 | The Boeing Company | Positioning system, device, and method for in-flight refueling |
| US7185854B2 (en) | 2004-06-18 | 2007-03-06 | The Boeing Company | In-flight refueling system and method for extending and retracting an in-flight refueling device |
| US7464736B2 (en) | 2004-06-24 | 2008-12-16 | Shaw Aero Devices, Inc. | System and method for preventing incorrect aircraft fuel usage |
| US7082906B2 (en) | 2004-06-25 | 2006-08-01 | Shaw Aero Devices Inc. | Piston cooling system |
| US6966525B1 (en) | 2004-06-28 | 2005-11-22 | The Boeing Company | In-flight refueling system, alignment system, and method for automatic alignment and engagement of an in-flight refueling boom |
| US20060292018A1 (en) | 2004-07-08 | 2006-12-28 | Jones Philip E | Hydraulic powered pneumatic super charger for on-board inert gas generating system |
| US7562847B2 (en) | 2004-07-12 | 2009-07-21 | Parker-Hannifin Corporation | Autonomous in-flight refueling system |
| US7281687B2 (en) | 2004-07-14 | 2007-10-16 | The Boeing Company | In-flight refueling system and method for facilitating emergency separation of in-flight refueling system components |
| US7097139B2 (en) | 2004-07-22 | 2006-08-29 | The Boeing Company | In-flight refueling system, damping device and method for damping oscillations in in-flight refueling system components |
| US7246774B2 (en) * | 2004-07-23 | 2007-07-24 | The Boeing Company | In-flight refueling system, boom, and method for extending range of motion of an in-flight refueling boom |
| EP1789315A2 (en) | 2004-07-29 | 2007-05-30 | Charles W. Bernard | System and method for remote control of interdiction aircraft |
| US7137597B2 (en) | 2004-08-24 | 2006-11-21 | The Boeing Company | In-flight refueling system, bladder device and method for preventing oscillations in in-flight refueling system components |
| US7137598B2 (en) | 2004-08-26 | 2006-11-21 | The Boeing Company | In-flight refueling system, sensor system and method for damping oscillations in in-flight refueling system components |
| US7007894B1 (en) | 2004-09-21 | 2006-03-07 | The Boeing Company | In-flight refueling system, damping device and method for preventing oscillations in in-flight refueling system components |
| US8817981B2 (en) | 2004-11-18 | 2014-08-26 | Biogy, Inc. | Generation of registration codes, keys and passcodes using non-determinism |
| IL170670A0 (en) | 2005-09-05 | 2006-12-31 | Israel Aerospace Ind Ltd | Drogue |
| US8186623B2 (en) * | 2005-12-22 | 2012-05-29 | Ge Aviation Systems, Llc | Controllable drogue |
| US8590840B2 (en) * | 2006-11-08 | 2013-11-26 | The Boeing Company | Boom force absorber systems and methods for aerial refueling |
| US8132759B2 (en) | 2007-03-21 | 2012-03-13 | The Boeing Company | System and method for facilitating aerial refueling |
| US7798449B2 (en) | 2007-08-13 | 2010-09-21 | Raytheon Company | Method and system for inflight refueling of unmanned aerial vehicles |
| ATE482142T1 (de) | 2007-09-28 | 2010-10-15 | Saab Ab | System zur betankung während des fluges |
| US7980512B1 (en) | 2008-06-13 | 2011-07-19 | The Boeing Company | System and method for displaying aerial refueling symbology |
| EP2253393A1 (de) | 2009-05-18 | 2010-11-24 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zur Rückgewinnung von Energie aus einem Warmbandbund |
| IT1402751B1 (it) | 2010-11-12 | 2013-09-18 | Ecir Eco Iniziativa E Realizzazioni S R L | Metodo per il condizionamento di scorie derivate da smaltimento di impianti nucleari |
| EP2915751B1 (en) | 2014-03-07 | 2016-09-28 | Airbus Defence and Space SA | A hose & drogue in-flight refueling method and system with an improved control of the hose & drogue motion |
| EP3040280A1 (en) | 2014-12-30 | 2016-07-06 | Airbus Defence and Space SA | Method and system for air to air refuelling |
| US10703501B2 (en) * | 2017-03-17 | 2020-07-07 | Analytical Mechanics Associates, Inc. | Drogue control systems and apparatus |
-
2017
- 2017-07-10 IL IL253407A patent/IL253407B/en active IP Right Grant
-
2018
- 2018-07-08 SG SG11201912391TA patent/SG11201912391TA/en unknown
- 2018-07-08 EP EP18832557.5A patent/EP3652071B1/en active Active
- 2018-07-08 US US16/623,487 patent/US11465768B2/en active Active
- 2018-07-08 KR KR1020207001700A patent/KR102730131B1/ko active Active
- 2018-07-08 WO PCT/IL2018/050742 patent/WO2019012523A1/en not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140113896A (ko) * | 2011-07-22 | 2014-09-25 | 카렐턴 라이프 서포트 시스템즈, 아이엔씨 | 공중 급유 시스템, 장치 및 방법 |
| WO2013102903A2 (en) * | 2012-01-04 | 2013-07-11 | Israel Aerospace Industries Ltd. | Devices, systems and methods for refueling air vehicles |
| KR20140114003A (ko) * | 2012-01-04 | 2014-09-25 | 이스라엘 에어로스페이스 인더스트리즈 리미티드 | 비행체들을 재급유하는 디바이스들, 시스템들 및 방법들 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019012523A1 (en) | 2019-01-17 |
| KR102730131B1 (ko) | 2024-11-15 |
| IL253407A0 (en) | 2017-12-31 |
| US11465768B2 (en) | 2022-10-11 |
| IL253407B (en) | 2020-08-31 |
| EP3652071A1 (en) | 2020-05-20 |
| SG11201912391TA (en) | 2020-01-30 |
| EP3652071A4 (en) | 2021-03-17 |
| EP3652071B1 (en) | 2022-10-19 |
| US20200207483A1 (en) | 2020-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200028954A (ko) | 급유 장치 | |
| US10543929B2 (en) | Systems and method for air vehicles | |
| US11360491B2 (en) | Loss-of-control prevention and recovery flight controller | |
| EP3642114B1 (en) | System and method for refueling air vehicles | |
| CN105366036B (zh) | 用于在电传操纵飞行器系统中进行操纵器控制的系统 | |
| JP6720031B2 (ja) | 宇宙機及びその着陸方法 | |
| CN107521669B (zh) | 利用推力差修整控制飞行器 | |
| CN105857586B (zh) | 用于控制可转向起落架的方法和设备 | |
| CN111352437A (zh) | 用于飞行器的纵向控制的方法和系统 | |
| JP2004268730A (ja) | 無人ヘリコプタの姿勢制御方法 | |
| US10459456B2 (en) | Autonomous helicopter posture regulation to moving reference frames | |
| JP2008201183A (ja) | 姿勢制御装置 | |
| EP3232284A1 (en) | Method and apparatus for control of a steerable landing gear | |
| Cain et al. | First development steps of an actively controlled drogue | |
| ES3031887T3 (en) | Coupling method for redundant servo devices of an actuator control system, associated system and device | |
| EP4691918A1 (en) | Autonomous aerial refueling receiver (a2r2) mission state management | |
| CN120793186A (zh) | 用于自动空对空补充燃料的吊杆引导系统 | |
| BR102018067317A2 (pt) | Sistema de rastreamento de atitude para controle manual de aeronaves |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200117 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210707 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20221110 Patent event code: PE09021S01D |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20230918 Patent event code: PE09021S02D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240826 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20241111 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20241112 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |