KR20200029468A - 전기 기계 - Google Patents
전기 기계 Download PDFInfo
- Publication number
- KR20200029468A KR20200029468A KR1020207001459A KR20207001459A KR20200029468A KR 20200029468 A KR20200029468 A KR 20200029468A KR 1020207001459 A KR1020207001459 A KR 1020207001459A KR 20207001459 A KR20207001459 A KR 20207001459A KR 20200029468 A KR20200029468 A KR 20200029468A
- Authority
- KR
- South Korea
- Prior art keywords
- pulse
- sub
- machine
- machines
- pwm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000000630 rising effect Effects 0.000 claims abstract description 7
- 238000001514 detection method Methods 0.000 claims description 49
- 238000000034 method Methods 0.000 claims description 16
- 238000010586 diagram Methods 0.000 description 10
- 239000004065 semiconductor Substances 0.000 description 7
- 239000003990 capacitor Substances 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 2
- 239000013078 crystal Substances 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000005672 electromagnetic field Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of AC power input into DC power output; Conversion of DC power input into AC power output
- H02M7/42—Conversion of DC power input into AC power output without possibility of reversal
- H02M7/44—Conversion of DC power input into AC power output without possibility of reversal by static converters
- H02M7/48—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/5387—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration
- H02M7/53871—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration with automatic control of output voltage or current
- H02M7/53873—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration with automatic control of output voltage or current with digital control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Multiple Motors (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
본 발명은 전기 기계, 특히 전기 모터 및/또는 발전기에 관한 것이다. 전기 기계는 고정자, 및 특히 영구 자석으로 또는 통전을 위해 설계된 회전자를 포함한다. 기계는 적어도 두 개의 서브 기계들을 포함한다. 서브 기계들은 각각 동일한 개수의 위상을 갖는다. 본 발명에 따르면, 기계는 각각의 서브 기계에 대해 전력 출력단을 가진다. 기계는 또한 전력 출력단과 연결된 적어도 하나의 제어 유닛을 포함한다. 제어 유닛은 전력 출력단들을 제어하기 위한 펄스 폭 변조된 신호를 생성하도록 설계된다. 제어 유닛은 또한 서브 기계들 중 하나의 서브 기계에 대한 각각 하나의 스위칭 시점을 나타내는 PWM 펄스의 하강 또는 상승 에지와 서브 기계들 중 다른 서브 기계에 대한 PWM 펄스의 펄스 센터가 서로 시간 오프셋되는 방식으로 서브 기계들에 대한 PWM 신호를 생성하도록 설계된다.
Description
본 발명은 전기 기계, 특히 전기 모터 및/또는 발전기에 관한 것이다. 전기 기계는 고정자, 및 특히 영구 자석으로 또는 통전을 위해 설계된 회전자를 포함한다. 기계는 적어도 2 개의 서브 기계들을 포함한다. 서브 기계들은 각각 동일한 개수의 위상을 가진다. 서브 기계들은 바람직하게는 각각 고정자의 고정자 코일들의 일부를 포함하고, 회전자를 회전시키기 위한 자기 회전장을 서로 독립적으로 생성하도록 각각 설계된다. 기계, 특히 고정자는 바람직하게는 하나의 서브 기계의 각각의 위상에 대해 적어도 하나, 적어도 2 개, 적어도 3 개 또는 단 하나의 고정자 코일을 포함한다.
DE 10 2005 043 576 A1은 전기적으로 분리된 적어도 2 개의 고정자 권선들을 포함한 전기 기계를 작동시키는 방법을 개시하고, 제 1 고정자 권선에는 제 1 서브 인버터를 통해 전류가 공급되고, 제 2 고정자 권선에는 제 2 서브 인버터를 통해 전류가 공급된다. 서브 인버터는 오프셋 클록된 신호들에 의해 제어된다.
본 발명의 과제는 종래 기술에 비해 개선된 전기 기계를 제공하는 것이다. 본 발명의 과제는 또한 전기 기계를 제어하는 방법을 제공하는 것이다.
본 발명에 따르면, 기계는 각각의 서브 기계에 대해 전력 출력단을 포함한다. 기계는 전력 출력단들과 연결된 적어도 하나의 제어 유닛을 포함한다. 제어 유닛은 전력 출력단들을 제어하기 위한 펄스 폭 변조된 신호를 생성하도록 설계된다. 제어 유닛은 또한 서브 기계들 중 하나의 서브 기계에 대한 각각 하나의 스위칭 시점을 나타내는 PWM 펄스의 하강 또는 상승 에지와 서브 기계들 중 다른 서브 기계에 대한 PWM 펄스의 펄스 센터가 서로 시간 오프셋되는 방식으로 서브 기계들에 대한 PWM 신호를 생성하도록 설계된다.
PWM 펄스의 펄스 센터의 시점에서 바람직하게 이루어질 수 있는 고정자 코일 전류의 전류 검출은 고정자의 고정자 코일을 스위칭하기 위해 생성되는 PWM 펄스의 상승 또는 하강 에지의 경우 방해받을 수 있다는 것이 알려져 있다. PWM 펄스에 의해 제어되는 스위칭 에지가 전력 출력단에 의해 인가되는 고정자 코일은 다른 고정자 코일의 고정자 코일 전류의 전류 검출, 특히 전류 측정을 방해할 수 있는 전자기장을 생성한다. 상기 방해는 특히 이전에 PWM 신호라고도 한 서브 기계들에 대해 생성된 펄스 패턴이 서로 상이하거나 또는 서브 기계들의 PWM 제어가 서로 시간상 오프셋되게 이루어지면 나타날 수 있다.
바람직하게는 고정자의 고정자 코일들의 일부를 포함하는 각각의 서브 기계는 회전자를 회전시키기 위한, 특히 회전자의 완전한 일 회전을 위한 자기장을 생성하도록 설계된다. 서브 기계들은 바람직하게는 각각 동일한 중간 회로와 전기적으로 연결되고 동일한 중간 회로로부터 에너지를 공급받을 수 있다. 제어 유닛은 바람직하게는 전력 출력단에 PWM 신호를 인가함으로써 서브 기계들을 서로 위상 오프셋되게 제어하도록 설계된다. 이로써, 중간 회로와 연결된 중간 회로 커패시터가 바람직하게는 부하 경감될 수 있다. 서브 기계들의 제어 패턴들 사이의 위상 오프셋은 바람직하게는 PWM 주기의 20 내지 30%, 특히 바람직하게는 PWM 주기의 25% 이다. 따라서, 중간 회로 커패시터는 서브 기계들에 전류를 교대로 공급할 수있다.
바람직한 실시예에서, 기계는 제어 유닛과 연결된 적어도 하나의 전류 센서를 포함한다. 전류 센서는 서브 기계의 적어도 하나의 위상 또는 모든 위상의 전류를 검출하도록 설계된다. 제어 유닛은 PWM 펄스의 펄스 센터 동안 서브 기계의 적어도 하나의 위상의 위상 전류를 검출하도록 설계되고, PWM 펄스의 스위칭 시점들은 펄스 센터에 대해 그리고 이로써 전류의 검출 시점에 대해 시간상 서로 오프셋된다. 기계는 바람직하게는 각각의 서브 기계에 대해 적어도 하나의 전류 센서를 포함한다. 전류 센서는 예를 들어 션트 저항으로서 형성될 수 있다. 전류 센서에 의해, 하나의 서브 기계의 하나의 위상의 위상 전류가 바람직하게 검출 될 수 있고 위상 전류를 나타내는 전류 신호가 생성될 수 있다. 제어 유닛은 바람직하게는 입력측에서 전류 센서와 연결되고, 제어 유닛에 의해 전력 출력단을 제어하기 위한 제어 파라미터 또는 조절 입력 파라미터로서 전류 신호를 수신할 수 있다.
바람직한 실시예에서, 제어 유닛은 하나의 서브 기계의 모든 위상에 대한 PWM 주기의 PWM 펄스 지속 시간과 펄스 포우즈 지속 시간 간의 펄스 듀티 팩터를 균일하게 변경하고 이로써 상기 서브 기계의 펄스 에지와 적어도 하나의 다른 서브 기계에 대한 PWM 펄스의 펄스 센터 간의 시간 오프셋을 생성하도록 설계된다. 하나의 서브 기계의 모든 고정자 코일들에 대한 PWM 펄스의 지속 시간을 동시에 변경함으로써, 이 서브 기계의 전압 벡터의 전압 오프셋이 생성되지만, 이는 서브 기계들의 위상들의 전위차에 영향을 미치지 않는다.
바람직한 실시예에서, 제어 유닛은 전력 출력단의 하이 사이드 반도체 스위치에 의해 생성된 하이 사이드 펄스의 펄스 지속 시간과, 동일한 전력 출력단의 로우 사이드 반도체 스위치에 의해 생성될 수 있는 로우 사이드 펄스의 펄스 지속 시간을 서로 교대로 변경하도록 설계된다. 이로써, 펄스 연장에 의해 추가로 생성되는 전력 출력단에서의 전력 손실은 특히 하이 사이드 반도체 스위치들과 로우 사이드 반도체 스위치들 사이에서 균일하게 분배될 수 있다.
바람직한 실시예에서, 제어 유닛은 하나의 위상에 대한 펄스 듀티 팩터를 특히 하부 동적 범위의 상한으로 변경하도록 설계된다. 이로써, 결과적인 전압 벡터의 네거티브 전압 값은 PWM 펄스의 PWM 펄스 지속 시간으로부터 사전에 결정된 시간 지속 시간을 감산하면 방지될 수 있다.
바람직한 실시예에서, 제어 유닛은 전류 검출 인터벌을 생성하고 전류 검출 인터벌 동안 전류를 검출하도록 설계된다. 또한, 제어 유닛은 바람직하게는 상승 또는 하강 에지가 전류 검출 인터벌의 시작 또는 종료 시점과 일치하거나 또는 전류 검출 인터벌 외부에 놓이는 방식으로 펄스 듀티 팩터를 변경하도록, 특히 증가시키거나 또는 감소시키도록 설계된다. 전력 출력단들을 작동시키기 위한, PWM 변조를 이용해 제어 유닛에 의해 생성될 작동 전압은 바람직하게는 전류 검출 인터벌의 한계에까지 도달할 수 있고, 이로써 전력 출력단, 특히 전력 출력단의 위상에 인가될 작동 전압의 제어가 바람직하게는 전류 검출 인터벌의 시간 윈도우에 의해 결정되는 특히 허용되지 않는 전압 인터벌에까지 도달하는 전압 인터벌 내에서 이루어질 수 있다. 전력 출력단들을 작동시키기 위한, PWM 변조를 이용해 제어 유닛에 의해 생성될 작동 전압은 PWM 변조의 펄스 듀티 팩터에 의해 결정된 기계의 변조에 상응한다.
바람직한 실시예에서, 제어 유닛은 적어도 하나 또는 다수의 PWM 주기에 대한 펄스 듀티 팩터를 변경하도록 설계된 펄스 폭 변조기를 포함한다. 이로써, 제어 유닛은 펄스 폭 변조기에 의해 고정자 코일에 인가될 전압을 펄스 듀티 팩터를 변경함으로써 설정할 수 있다.
본 발명은 또한 적어도 두 개의 서브 기계들을 포함한 전기 기계를 제어하는 방법에 관한 것이다. 서브 기계들은 각각 동일한 개수의 고정자 코일들을 포함한다. 이 방법에서, 고정자 코일들을 제어하기 위해 펄스 폭 변조된 펄스 패턴이 생성되고, 고정자 코일들 중 적어도 하나를 통해 흐르는 전류는 펄스 센터의 시간 범위에서 검출된다. 이 방법에서, 적어도 하나의 다른 서브 기계에 대한 펄스 주기의 펄스 듀티 팩터는 PWM 펄스의 펄스 시작 및/또는 펄스 종료가 전류 검출, 특히 펄스 센터에 대해 시간상 이격되게 이루어지는 방식으로 변경, 특히 연장되거나 또는 단축된다.
상기 방법의 바람직한 변형에서, 전류는 펄스 센터의 시점을 포함하는 전류 검출 인터벌 내에서 검출된다. 펄스 센터의 영역에서의 전류 검출은 바람직하게는 펄스 폭 변조기에 의해 생성된, 바람직하게는 센터링되게 생성된 PWM 펄스의 PWM 클록에 의해 제어될 수 있다. 예를 들어, 전류 검출이 PWM 주기 마다, 제 2, 제 3 또는 제 4 PWM 주기 마다, 또는 서로 간에 사전에 결정된 수의 PWM 주기를 포함한 간접적으로 연속하는 PWM 주기에서만 이루어질 수 있으므로, 포함된 PWM 주기들에서 전류 검출이 이루어지지 않는다.
다른 서브 기계에서의 펄스 듀티 팩터는 바람직하게는 다른 서브 기계에 대한 PWM 펄스가 연장되거나 단축되는 전체 변조의 절반이고 따라서 50% 이다. 이러한 변조 값에서, 다른 서브 기계에 대한 제어 펄스의 펄스 센터는 상기 서브 기계에 대한 제어 펄스의 펄스 에지와 일치한다. 펄스 센터의 시점 또는 시간 범위에서 다른 서브 기계의 전류 검출이 이루어지면, 전류 검출은 다른 서브 기계의 제어 펄스의 에지에 의해 방해받을 수 있다. 2 개의 서브 기계들 간의 PWM 제어의 위상 오프셋은 예를 들어 PWM 주기의 25% 이다.
또한 바람직하게는 서브 기계의 듀티 사이클 팩터의 방지될 범위는 전체 변조의 50 내지 60% 및/또는 0 내지 10% 이다. 이로써, 서브 기계에서의 전류 검출이 바람직하게 방해받지 않고 이루어질 수 있다. 서브 기계들 간의 PWM 제어의 다른 위상 오프셋의 경우 변조의 다른 방지될 범위가 얻어진다.
본 발명은 이제 도면들 및 다른 실시예들을 참조하여 설명된다. 다른 바람직한 변형 예들은 종속 청구항들 및 도면들에 기술된 특징에 제시된다.
도 1은 전류 검출이 PWM 펄스의 스위칭 에지에 의해 방해받을 수 없는 방식으로 PWM 펄스의 펄스 지속 시간을 다른 서브 기계의 구동 전류 검출에 따라 변경하도록 설계된 전기 기계에 대한 실시예를 도시하고,
도 2는 상이한 2 개의 서브 기계들을 제어하기 위한 제어 펄스가 도시된 다이어그램이며,
도 3은 펄스 지속 시간 연장에 의해 야기된 하나의 고정자 코일에서의 전압 프로파일의 오프셋 변이가 도시된 다이어그램이고,
도 4는 특히 중간 변조 범위가 곡선 프로파일들에서 점프되는 하나의 서브 기계의 3 개의 고정자 코일들에서의 전압 프로파일들을 도시하며,
도 5는 2 개의 변조 범위들이 곡선 프로파일들에서 점프되는 하나의 서브 기계의 3 개의 고정자 코일에서의 전압 프로파일들을 도시한다.
도 2는 상이한 2 개의 서브 기계들을 제어하기 위한 제어 펄스가 도시된 다이어그램이며,
도 3은 펄스 지속 시간 연장에 의해 야기된 하나의 고정자 코일에서의 전압 프로파일의 오프셋 변이가 도시된 다이어그램이고,
도 4는 특히 중간 변조 범위가 곡선 프로파일들에서 점프되는 하나의 서브 기계의 3 개의 고정자 코일들에서의 전압 프로파일들을 도시하며,
도 5는 2 개의 변조 범위들이 곡선 프로파일들에서 점프되는 하나의 서브 기계의 3 개의 고정자 코일에서의 전압 프로파일들을 도시한다.
도 1에는 전기 기계(1)에 대한 실시예가 개략적으로 도시된다. 전기 기계(1)는 고정자(2)를 포함한다. 본 실시예에서, 고정자(2)는 각각 3 상으로 형성되며 이를 위해 3 개의 고정자 코일들을 갖는 2 개의 서브 기계들을 포함한다. 본 실시예에서, 서브 기계(3)는 고정자 코일들(8, 9 및 10)을 포함한다. 서브 기계들 중 다른 서브 기계(4)는 고정자 코일들(5, 6 및 7)을 포함한다. 기계(1)는 또한 예를 들어 영구 자석으로 설계된 회전자(11)를 포함한다. 기계(1)는 또한 본 실시예에서 2 개의 부분 출력단들(13 및 14)로 형성된 출력단(12)을 포함한다. 각각의 부분 출력단(13, 14)은 각각 하나의 B6 브리지 또는 3 개의 H 브리지들을 포함한다. H 브리지는 2 개의 반도체 스위치 하프 브리지들을 포함하고, 이들의 출력단은 고정자 코일의 연결부와 각각 연결될 수 있다. 부분 출력단(13)은 출력측에서 전기 연결부(23)를 통해 서브 기계(3)와 연결된다. 출력단(14)은 출력측에서 전기 연결부(24)를 통해 서브 기계(4)와 연결된다. 부분 출력단(13)은 회전자(11)를 회전시키기 위한 자기 회전장을 생성하기 위해 고정자 코일들(8, 9 및 10)에 전류를 공급하도록 설계된다. 서브 기계(14)는 회전자(11)를 회전시키기 위한 자기 회전장을 생성하기 위해 고정자 코일들(5, 6 및 7)에 전류를 공급하도록 형성된다. 부분 출력단들(13 및 14)은 각각의 서브 기계(3 또는 4)와 함께 로터(11)를 독립적으로 여기시켜 회전시킬 수 있다. 이로써, 기계(1)는 정상 작동 중에 로터(11)를 함께 운동시킬 수 있는 2 개의 상호 독립적인 서브 기계들을 포함하거나, 또는 하나의 서브 기계가 결함이 있는 경우, 나머지 서브 기계가 회전자(11)를 더 운동시킬 수 있다.
기계(1)는 또한 제어 유닛(17)을 포함한다. 제어 유닛(17)은 출력측에서 연결 라인(27)틀 통해 출력단(12)과 연결되고 거기서 부분 출력단(13)과 연결되고, 연결 라인(27)을 통해 서브 기계(3)를 제어하고 이를 위해 제어 신호, 특히 펄스 패턴을 생성하고 이를 부분 출력단(13)에 전송도록 설계된다. 제어 유닛(17)은 출력측에서 연결 라인(28)을 통해 부분 출력단(14)과 연결되고, 부분 출력단(14), 특히 부분 출력단(14)의 제어 연결부들을 제어하여 서브 기계(4)에 전류를 공급하도록 설계된다. 기계(1)는 또한 부분 출력단(13)의 전류를 검출하기 위한 전류 센서(16), 및 부분 출력단(14)의 전류를 검출하기 위한 전류 센서(15)를 포함한다. 전류 센서들(15 및 16)은 예를 들어 션트 저항에 의해 형성된다. 부분 출력단들(13 및 14)은 도 1에 도시된 것과는 달리 공통 전류 센서에 의해서도 연결될 수 있다. 이를 위해, 부분 출력단들(13 및 14)의 접지선이 각각 병합될 수 있고 병합된 접지선은 공통 션트 저항을 통해 기계(1)의 접지 연결부로 이어질 수 있다.
본 실시예에서, 제어 유닛(17)은 서브 기계들(3 및 4)을 서로 위상 오프셋되게 제어하도록 설계된다. 이로써, 부분 출력단들(13 및 14)에 의해 공통으로 사용되는 중간 회로 커패시터(29)가 부하 경감될 수 있다. 전류 센서(16)는 출력측에서 연결 라인(25)을 통해 제어 유닛(17)과 연결된다. 전류 센서(15)는 출력측에서 연결 라인(26)을 통해 제어 유닛(17)과 연결된다. 전류 센서들(16 및 15)은 각각 각각의 부분 출력단(13 또는 14) 내에 흐르는 전류를 검출하고 전류를 나타내는 전류 신호를 생성하며 출력측에서 제어 유닛(17)으로 전송하도록 설계된다.
제어 유닛(17)은 펄스 패턴 발생기(18)를 포함한다. 펄스 패턴 발생기(18)는 전력 출력단(12), 특히 전력 출력단(12)의 제어 연결부들을 제어하기 위한 펄스 폭 변조된 제어 신호들을 생성하고 이들을 출력측에서 출력하도록 설계된다. 이를 위해, 펄스 패턴 발생기(18)는 펄스 폭 변조기(19)를 포함한다. 펄스 폭 변조기(19)는 입력부(22)를 포함하고 입력부(22)에서 수신되는 제어 신호, 특히 진폭 신호에 따라 펄스 지속 시간과 펄스 포우즈 지속 시간 사이의 펄스 듀티 팩터를 생성하고 전력 출력단(12)의 반도체 스위치들의 스위칭 온 및 스위칭 오프를 위한 제어 펄스를 펄스 듀티 팩터에 따라 생성하도록 설계된다.
하기에서 PWM 변조기라고도 하는 펄스 폭 변조기(19)는 입력측에서 제어 패턴 발생기(20)와 연결된다. 본 실시예에서, 제어 패턴 발생기는 각각의 위상에 대해, 그리고 이로써 위상에 상응하는 서브 기계들의 각각의 고정자 코일에 대해 제어 신호를 생성하도록 설계된다. 제어 신호는 예를 들어 사인 파형 또는 추가로 기본 발진인 사인 파형에 상응하는 고조파, 바람직하게는 제 3 고조파를 나타낸다.
제어 유닛(17)은 적어도 전류 검출 시점에서, 또는 제어 펄스의 제어 펄스 지속 시간의 절반의 시점에 또는 시간적 범위에 있는 전류 검출 인터벌 내에서, 전류 센서들(15 및 16)에 의해 생성된 전류 신호를 검출하도록 설계된다. 이로써, 제어 유닛(17)은 전력 출력단 내에, 특히 부분 출력단들(13 및 14) 내에 흐르는 전류를 PWM 변조기(19)에 의해 생성된 제어 펄스의 펄스 센터의 시점에서 검출할 수 있다. PWM 변조기(19)는 예를 들어 펄스 주기 내에서 센터링되게 제어 펄스를 생성하도록 설계된다. 전류 검출은 예를 들어 제어 펄스 생성과 관련해서 센터링되게 이루어진다. 제어 유닛(17), 특히 PWM 변조기(19)는 서브 기계들(3 및 4)을 서로 위상 오프셋되게 제어하도록 설계된다. 서브 기계들(3 및 4)에 대한 펄스 패턴들 사이의 위상 오프셋은 펄스 주기 지속 시간의 예를 들어 25% 이다. 제어 유닛(17)은 하나의 서브 기계에 대한 제어 펄스의 스위칭 에지의 경우, 상기 스위칭 에지의 스위칭 시점이 다른 또는 동일한 서브 기계의 전류 검출의 전류 검출 인터벌에 속하면, 적어도 하나의 주기 클록 또는 다수의 주기 클록 동안 적어도 구동 전류의 전류 검출의 지속 시간 동안 서브 기계에 대한 제어 펄스의 제어 펄스 지속 시간을 변경시키고, 특히 연장하거나 단축하도록 설계된다.
제어 유닛(17), 본 실시예에서 펄스 패턴 발생기(18)는 가산기 유닛(21)을 포함하고, 상기 가산기 유닛은 전류 검출 인터벌 내에서 스위칭 에지의 일치에 따라, 서브 기계에 대한 제어 펄스의 제어 펄스 지속 시간을 연장시키고, 스위칭 에지가 전류 검출 인터벌 외부에 놓이는 방식으로 연장된 제어 펄스를 생성하도록 설계된다. 펄스 패턴 발생기(18)는 입력측에서 타이머(41)와 연결되고, 타이머(41)에 의해 생성되어 타이밍 사이클을 나타내는 타이밍 사이클 신호를 수신하고 타이밍 사이클 신호에 따라 PWM 신호를 생성하도록 설계된다. 타이머(41)는 예를 들어 석영 결정에 의해 형성된다.
도 2에는 서로 상이한 서브 기계들의 2 개의 상이한 고정자 코일들에 대한 2 개의 상이한 펄스 패턴 신호들이 개략적으로 도시된 다이어그램이 도시된다. 다이어그램은 시간 축(30) 및 진폭 축(31)을 포함한다. 곡선(33)은 예를 들어 서브 기계(3)의 고정자 코일(8)에 전류를 공급하게 하는 부분 출력단(13)을 제어하기 위한 펄스 폭 변조된 제어 신호를 나타낸다.
곡선(33)으로 나타낸 펄스 패턴 신호는 시점(32)에서 시작하고 추후 시점(36)에서 종료되는 제어 펄스(61)를 포함한다. 제어 펄스(61)는 시작의 시점(32)과 종료의 시점(36) 사이에서 연장되는 제어 펄스 지속 시간(65)을 갖는다. 제어 펄스(61)에 이어 펄스 포우즈 지속 시간(66)을 가진 펄스 포우즈가 이어진다. 제어 펄스(61)의 PWM 주기의 주기 지속 시간은 제어 펄스 지속 시간(65) 및 펄스 포우즈 지속 시간(66)을 포함한다. 제어 펄스 지속 시간(65)과 펄스 포우즈 지속 시간(66)의 비는 PWM 변조의 펄스 듀티 팩터를 결정한다.
제어 펄스(61)는 그 단부에 하강 에지(35)를 갖는다. 도 2에는 또한 제어 펄스(62)를 포함한 곡선(34)으로 나타난 펄스 폭 변조된 제어 신호가 도시된다. 제어 펄스(62)는 시점(36)에서 그 펄스 센터를 갖는다. 제어 펄스(62)에 의해, 그리고 이로써 곡선(34)으로 나타난 펄스 폭 변조된 제어 신호에 의해, 부분 출력단(14)이 제어되고, 이로써 다른 서브 기계(4)의 고정자 코일, 예를 들어 도 1의 고정자 코일(5)에 전류가 공급된다. 도 2에는 또한 시점(36)을 포함하므로 제어 펄스(62)의 펄스 센터가 전류 검출 인터벌(40) 내에 놓이는 전류 검출 인터벌(40)이 도시된다. 곡선(33)으로 나타난 제어 신호의 전술한 스위칭 에지(35)는 본 실시예에서 도 1에 도시된 서브 기계들(3 및 4)의 제어 신호들의 위상 변이에 의해 야기되어 전류 검출 인터벌(40) 내에 놓이고 전류 센서(15)에 의한 전류 검출, 특히 전류 센서(15)에 의해 생성된 전류 신호를 전류 검출 동안 방해할 수 있다. 도 2에는 또한 하강 에지(35')를 가진 시간상 연장된 제어 펄스(61')가 도시되고, 상기 하강 에지의 시점(37)은 전류 검출 인터벌(40) 외부에, 본 실시예에서는 추후에 놓인다. 시간상 연장된 제어 펄스(61')는 연장된 제어 펄스 지속 시간(65')을 갖는다. 전류 검출 인터벌(40)은 하한(38) 및 상한(39)을 갖는다. 하한(38)과 상한(39) 사이에는, 예를 들어 도 1에 도시된 펄스 폭 변조기(19)에 의한 제어 펄스(61)의 생성시 적어도 다른 서브 기계의 전류 검출 시점에서 방지되어야 하는 제어 펄스(61)에 대한 펄스 폭 변조의 변조 범위가 놓인다.
상승 또는 하강 에지(35)가 전류 검출 인터벌(40) 외부에 놓이는 방식으로 제어 펄스(61)를 생성하기 위한 펄스 듀티 팩터를 생성하도록 설계된 가산 유닛(21)에 의해, 전류 검출 인터벌(40) 내에 놓인 펄스 듀티 팩터 및 이로써 상응하는 고정자 코일에 전류 공급시 설정되는, 상응하는 고정자 코일에 대한, 상기 펄스 듀티 팩터에 상응하는 전압 값이 차단된다.
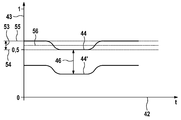
도 3에는 시간을 나타내는 횡축(42) 및 신호 진폭을 나타내는 종축(43)를 가진 다이어그램이 개략적으로 도시된다. 도 3에는 곡선(33)으로 나타낸 펄스 폭 변조된 신호에 의해 생성된, 하나의 고정자 코일에서의 PWM 주기에 걸쳐 특히 단기간 평균화된 예시적인 전압 프로파일이 도시된다. 곡선(44)으로 나타낸 전압 프로파일은 상한(55), 하한(54) 및 평균 값(56)을 가진 변조 인터벌(53) 내에 놓인다. 도 2에 도시된 제어 펄스(61)와 같은, 전압 프로파일(44)의 생성에 필요한 모든 제어 펄스가 도 2에 도시된 하강 에지(35)와 같은 각각의 하강 에지에 의해 도 3에서 변조 인터벌(53)에 상응하는 전류 검출 인터벌(40)에 속한다. 변조 인터벌(53)은 기계의 변조시 방지되어야 할 변조 범위를 결정한다.
도 2에 도시된 연장된 제어 펄스(35')는 곡선(44)으로 나타낸 전압 프로파일의 오프셋의 오프셋 변이(46)를 야기한다. 도 3에는 진폭 범위(53)로부터 오프셋 변이(46) 만큼 이동된 곡선(44), 및 이로써 변조 범위(53)로부터 이동된 전압 프로파일을 나타내는 곡선(44')도 도시된다. 오프셋 변이(46)에 대해, 하나의 서브 기계, 특히 서브 기계의 모든 고정자 코일들에 대한 반도체 스위치들을 제어하기 위한 제어 펄스가 동시에 연장되거나 또는 단축된다.
도 4에는 곡선(50), 곡선(51) 및 곡선(52)이 도시된 다이어그램이 개략적으로 도시된다. 다이어그램은 시간 축(48) 및 진폭 축(49)을 갖는다. 곡선들(50, 51 및 52)은 고정자 코일들(8, 9 및 10)에 전류 공급시 부분 출력단(13)에 의해 생성될 수 있는, 하나의 서브 기계의 상이한 고정자 코일들, 예를 들어 도 1의 서브 기계(3)의 3 개의 고정자 코일들(8, 9 및 10)에서의 각각 하나의 전압 프로파일을 나타낸다.
곡선(50)은 예를 들어 도 1의 고정자 코일(8)에서의 전압 프로파일에 상응하고, 곡선(51)은 고정자 코일(9)에서의 전압 프로파일에 상응하고, 곡선(52)은 고정자 코일(10)에서의 전압 프로파일에 상응한다. 도 4에는 또한 변조 범위(53), 변조 범위(53)의 평균값(56), 하한(54) 및 상한(55)이 도시된다.
도 4에는 또한 다른 서브 기계, 예를 들어 도 1의 서브 기계(4)의 전류가 검출되는 측정 시점(57)이 도시된다. 도 1의 펄스 폭 변조기(18)는 고정자 코일(9)에서 곡선(51)으로 나타낸 전압 프로파일을 생성하는 고정자 코일(9)의 통전을 일으키는 제어 펄스를, 평균값(56)과 하한(54) 사이의 인터벌에서 변조 범위(53)의 전압 영역에서, 제어 펄스의 제어 펄스 지속 시간이 전류 검출 인터벌 외부에서 연장되고 이로써 고정자 코일(9)에 생성되는 전압이 시점(57)에까지 변조 범위(53)의 하한(54)에서 최대로 연장되는 방식으로, 축소시키도록 설계된다. 시점(57)은 변조 범위(53)에서 변하지 않는 전압 프로파일의 평균값(56)에 상응한다. 평균값(56)과 상한(55) 사이의 변조 범위에 상응하는 제어 펄스는 펄스 폭 변조기(18)에 의해 상응하게 연장될 수 있고, 이로써 도 2의 하강 에지(35')와 같은 하강 에지들이 전류 검출 인터벌(40) 외부에 놓인다. 평균값(56)과 상한(55) 사이에 있는 변조 값은 적어도 전류 검출 인터벌(40)에서 상한(55)으로 변이된다. 도 4에는 또한 동일한 서브 기계(3)의 3 개의 고정자 코일들(8, 9 및 10)에 대한 제어 펄스 지속 시간의 동시 변화가 도시된다. 곡선(50)으로 나타낸 고정자 코일(9)에서의 전압 프로파일은 시점(57)에서 제어 펄스 지속 시간의 단축 또는 연장에 상응하는 진폭 프로파일(60)을 포함한다. 고정자 코일(10)에서의 전압 프로파일을 나타내는 곡선(52)은 시점(57)의 영역에서 제어 펄스 지속 시간의 변경에 의해 야기된 상응하는 진폭 프로파일(59)을 포함한다. 곡선(51)으로 나타낸 고정자 코일(9)에서의 전압 프로파일은 전류 검출 시점(57)의 영역에서 점프형 프로파일(58)을 갖는다.
도 5에는 각각 하나의 전압 프로파일을 나타내는 곡선들(73, 74 및 75)이 도시된 다이어그램이 개략적으로 도시된다. 다이어그램은 시간 축(71) 및 진폭 축(72)을 가진다. 본 실시예에서, 곡선들(73, 74 및 75)은 도 1에 도시된 서브 기계(3)의 전체 변조를 나타낸다. 도 5의 다이어그램에는 가능한 가장 작은 변조 값, 본 실시예에서 변조 범위의 0 값과 최대 변조 값(76)보다 작은 변조 값 사이에서 연장되는 다른 변조 범위(70)가 도시되고, 여기에서 최대 변조 값(76)은 서브 기계의 전체 변조에 상응한다. 전술한 더 작은 값은 이전에 언급된 변조 범위(70)의 상한(77)에 상응한다. 본 실시예에서, 변조 범위(70)는 매우 짧은 제어 펄스에 의해 서브 기계(3) 자체에 전류 공급을 위해 야기된다.
본 실시예에서, 펄스 폭 변조기(18)는 하기에서 하부 변조 범위라고도 하는 변조 범위(70)에 속하는 제어 펄스의 제어 펄스 지속 시간을, 연장된 제어 펄스가 변조 범위(70)의 상한(77)에 상응하는 제어 펄스 지속 시간을 갖는 방식으로 연장시키도록 설계된다. 도 1의 동일한 서브 기계(3)에서 전류 검출을 위한 측정 시점(57)은 서브 기계(3)에 대한 제어 펄스의 연장에 의해, 곡선들(73, 74)로 나타낸 전압 프로파일들이 하부 영역(70) 내로 각각 내려갈 상한(77)에 상응하는 시점에서도 나타날 수 있다. 하부 영역(70) 또는 전술한 변조 영역(53)에 놓인 전술한 전압 프로파일들은 제어 패턴 발생기(20)에 의해 생성된 제어 패턴에 의해 사전에 결정된다. 곡선들(73, 74 및 75)로 나타낸 전압 프로파일들은 단축된 또는 연장된 제어 펄스에 의해 야기되어 제어 패턴 발생기에 의해 사전에 결정된 신호 형태와 편차를 갖는다. 그러나, 이러한 방식으로 야기된 편차는 바람직하게는 매우 작은데, 그 이유는 바람직하게는 펄스 폭 변조의 펄스 주기 지속 시간을 결정하는 펄스 변조 주파수가 충분히 크게 선택되므로, 제어 펄스 지속 시간의 변경이 상응하게 정교하게 단계화되게 이루어질 수 있기 때문이다. 또한, 바람직하게는 변조 범위(53) 또는 추가로 하부 변조 범위(70)는 각각 최대 변조 값(76)으로 나타낸 기계의 전체 변조의 10 분의 1 보다 작다.
1
기계
2 고정자
3, 4 서브 기계
5, 6, 7, 8, 9, 10 고정자 코일
11 회전자
13, 14 전력 출력단
17 제어 유닛
33, 34 PWM 신호
35, 35' 펄스 에지
36 펄스 센터
38 시작
39 종료 시점
40 전류 검출 인터벌
61, 62 PWM 펄스
64 PWM 주기
65, 65' PWM 지속 시간
66 펄스 포우즈 지속 시간
70 하부 변조 범위
77 상한
2 고정자
3, 4 서브 기계
5, 6, 7, 8, 9, 10 고정자 코일
11 회전자
13, 14 전력 출력단
17 제어 유닛
33, 34 PWM 신호
35, 35' 펄스 에지
36 펄스 센터
38 시작
39 종료 시점
40 전류 검출 인터벌
61, 62 PWM 펄스
64 PWM 주기
65, 65' PWM 지속 시간
66 펄스 포우즈 지속 시간
70 하부 변조 범위
77 상한
Claims (10)
- 고정자(2) 및 회전자(11)를 포함한 전기 기계(1)로서, 상기 기계는 각각 동일한 개수의 위상을 가진 적어도 2 개의 서브 기계들(3, 4)을 포함한, 상기 전기 기계(1)에 있어서,
상기 기계(1)는 각각의 서브 기계(3, 4)에 대해 전력 출력단(13, 14)을 포함하고, 상기 기계(1)는 상기 전력 출력단들(13, 14)과 연결되며 상기 전력 출력단들(13, 14)을 제어하기 위한 PWM 신호(33, 34)를 생성하도록 설계된 적어도 하나의 제어 유닛(17)을 포함하고, 상기 제어 유닛(17)은 상기 서브 기계들(3, 4) 중 하나의 서브 기계(3)에 대한 각각 하나의 스위칭 시점을 나타내는 PWM 펄스(61)의 하강 또는 상승 에지(35)와 상기 서브 기계들(3, 4) 중 다른 서브 기계(4)에 대한 PWM 펄스(62)의 펄스 센터(36)가 서로 시간 오프셋되는 방식으로 상기 서브 기계들(3, 4)에 대한 PWM 신호(33, 34)를 생성하도록 설계되는 것을 특징으로 하는 전기 기계(1). - 제 1 항에 있어서,
상기 기계(1)는 상기 제어 유닛(17)과 연결되며 상기 서브 기계들(3, 4)의 적어도 하나의 위상 또는 모든 위상들의 위상 전류를 검출하도록 설계된 적어도 하나의 전류 센서(15, 16)를 포함하고, 상기 제어 유닛(17)은 PWM 펄스(62)의 펄스 센터(36) 동안 상기 서브 기계(3, 4)의 적어도 하나의 위상의 위상 전류를 검출하도록 설계되고, 상기 PWM 펄스(61)의 스위칭 시점이 상기 펄스 센터(36) 및 이로써 전류(40)의 검출 시점(36)에 대해 시간상 서로 오프셋되는 것을 특징으로 하는 전기 기계(1). - 제 1 항 또는 제 2 항에 있어서,
상기 제어 유닛(17)은 하나의 서브 기계(3, 4)의 모든 위상들에 대한 PWM 주기(64)의 PWM 펄스 지속 시간(65)과 펄스 포우즈 지속 시간(66) 간의 펄스 듀티 팩터를 균일하게 변경하고 이로써 상기 서브 기계(3)의 펄스 에지들(35, 35')과 적어도 하나의 다른 서브 기계(4)에 대한 상기 PMW 펄스(62)의 상기 펄스 센터(36) 사이의 시간 오프셋을 생성하도록 설계되는 것을 특징으로 하는 전기 기계(1). - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 제어 유닛(17)은 하이 사이드 펄스 및 로우 사이드 펄스의 펄스 지속 시간(65, 65')을 교대로 변경시키도록 설계되는 것을 특징으로 하는 전기 기계(1). - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 제어 유닛(17)은 하나의 위상에 대한 펄스 듀티 팩터를 특히 하부 변조 범위(70)의 상한(77)으로 변경하도록 설계되는 것을 특징으로 하는 전기 기계(1). - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 제어 유닛(17)은 전류 검출 인터벌(40)을 생성하고 상기 전류 검출 인터벌(40) 동안 전류를 검출하도록, 그리고 특히 상기 상승 또는 하강 에지(35)가 상기 전류 검출 인터벌(40)의 시작(38) 또는 종료 시점(39)과 일치하거나 또는 상기 전류 검출 인터벌의 외부에 놓이는 방식으로 상기 펄스 듀티 팩터(65, 66)를 변경, 특히 증가 또는 감소시키도록 설계되는 것을 특징으로 하는 전기 기계(1). - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 제어 유닛(17)은 적어도 하나의 또는 다수의 PWM 주기들(64) 동안 상기 펄스 듀티 팩터(65, 66)를 변경하도록 설계된 펄스 폭 변조기(18)를 포함하는 것을 특징으로 하는 전기 기계(1). - 적어도 2 개의 서브 기계들(3, 4)을 포함한 전기 기계(1)를 제어하는 방법으로서, 상기 서브 기계들은 각각 동일한 개수의 고정자 코일들(5, 6, 7, 8, 9, 10)을 포함하고. 상기 고정자 코일들(5, 6, 7, 8, 9, 10)을 제어하기 위해 펄스 폭 변조된 펄스 패턴들(33, 34)이 생성되고, 상기 고정자 코일들(5, 6, 7, 8, 9, 10) 중 적어도 하나를 통해 흐르는 전류가 펄스 센터(36)의 시간 범위(40)에서 검출되고, PWM 펄스(61)의 펄스 시작 및/또는 펄스 종료가 전류 검출에 대해, 특히 상기 펄스 센터(36)에 대해 시간상 오프셋되게 이루어지도록 적어도 하나의 다른 서브 기계(3)에 대한 PWM 주기(64)의 펄스 듀티 팩터(65, 66)가 변경되는, 특히 연장되거나 또는 단축되는, 전기 기계(1)를 제어하는 방법.
- 제 8 항에 있어서,
전류는 상기 펄스 센터(36)의 시점을 포함한 전류 검출 인터벌(40) 내에서 검출되는, 전기 기계(1)를 제어하는 방법. - 제 8 항 또는 제 9 항에 있어서,
상기 다른 서브 기계(4)에서의 펄스 듀티 팩터(65, 66)가 상기 기계의 전체 변조의 절반인, 전기 기계(1)를 제어하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017212574.8 | 2017-07-21 | ||
| DE102017212574.8A DE102017212574A1 (de) | 2017-07-21 | 2017-07-21 | Elektrische Maschine |
| PCT/EP2018/065892 WO2019015894A1 (de) | 2017-07-21 | 2018-06-14 | Elektrische maschine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200029468A true KR20200029468A (ko) | 2020-03-18 |
Family
ID=62620891
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207001459A Withdrawn KR20200029468A (ko) | 2017-07-21 | 2018-06-14 | 전기 기계 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11223314B2 (ko) |
| EP (1) | EP3656050B1 (ko) |
| JP (1) | JP2020527324A (ko) |
| KR (1) | KR20200029468A (ko) |
| CN (1) | CN110892630B (ko) |
| DE (1) | DE102017212574A1 (ko) |
| WO (1) | WO2019015894A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220019692A (ko) * | 2019-06-12 | 2022-02-17 | 로베르트 보쉬 게엠베하 | 전기 회전 기계의 회전자 위치를 결정하는 방법 및 이러한 방법을 수행하기 위한 전기 회전 기계 |
| KR102850482B1 (ko) * | 2024-07-10 | 2025-08-28 | 자화전자(주) | 모터제어장치 및 인버터 제어방법 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112087171B (zh) * | 2020-08-26 | 2022-02-11 | 湖南英迈智能科技有限公司 | 电流平滑方法及装置 |
| CN116157992B (zh) * | 2020-09-18 | 2026-04-03 | 日本电产株式会社 | 马达驱动电路和马达模块 |
| DE102024203058A1 (de) | 2024-04-03 | 2025-10-09 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Steuerung einer elektrischen Maschine |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09331696A (ja) * | 1996-06-11 | 1997-12-22 | Denso Corp | パルス幅変調負荷制御装置 |
| DE19825722A1 (de) * | 1998-06-09 | 1999-12-16 | Philips Patentverwaltung | Schaltungsanordnung zum Speisen eines Elektromotors |
| JP2002084774A (ja) * | 2000-09-07 | 2002-03-22 | Sony Corp | センサレスブラシレスモータ |
| GB0213098D0 (en) * | 2002-06-07 | 2002-07-17 | Trw Ltd | Motor control device |
| DE102005043576A1 (de) | 2005-09-12 | 2007-03-15 | Conti Temic Microelectronic Gmbh | Verfahren zum Betrieb einer elektrischen Maschine |
| JP4876661B2 (ja) * | 2006-03-24 | 2012-02-15 | 株式会社デンソー | 車両用発電電動装置 |
| US8115433B2 (en) * | 2008-09-23 | 2012-02-14 | GM Global Technology Operations LLC | Electrical system for pulse-width modulated control of a power inverter using phase-shifted carrier signals and related operating methods |
| JP2013017363A (ja) * | 2011-07-06 | 2013-01-24 | Omron Automotive Electronics Co Ltd | モータ制御装置 |
| JP5924931B2 (ja) | 2011-12-27 | 2016-05-25 | 川崎重工業株式会社 | 電動機駆動システム |
| DE102012207689A1 (de) * | 2012-05-09 | 2013-11-14 | Infineon Technologies Ag | Steuereinheit für eine elektrische Maschine und Verfahren |
| JP5916526B2 (ja) * | 2012-06-18 | 2016-05-11 | 三菱電機株式会社 | 電力変換器制御装置および多重巻線型電動機駆動装置 |
| DE102015202693A1 (de) * | 2014-03-07 | 2015-09-10 | Robert Bosch Gmbh | Verfahren zur Strangstrombestimmung in einem elektrischen Mehrphasensystem |
| DE112016002616T5 (de) * | 2015-06-11 | 2018-03-08 | Ksr Ip Holdings Llc | Modulationsschema für Multiphasen-Motoren |
-
2017
- 2017-07-21 DE DE102017212574.8A patent/DE102017212574A1/de not_active Withdrawn
-
2018
- 2018-06-14 JP JP2020502585A patent/JP2020527324A/ja active Pending
- 2018-06-14 KR KR1020207001459A patent/KR20200029468A/ko not_active Withdrawn
- 2018-06-14 CN CN201880048766.3A patent/CN110892630B/zh active Active
- 2018-06-14 EP EP18731447.1A patent/EP3656050B1/de active Active
- 2018-06-14 US US16/626,384 patent/US11223314B2/en not_active Expired - Fee Related
- 2018-06-14 WO PCT/EP2018/065892 patent/WO2019015894A1/de not_active Ceased
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220019692A (ko) * | 2019-06-12 | 2022-02-17 | 로베르트 보쉬 게엠베하 | 전기 회전 기계의 회전자 위치를 결정하는 방법 및 이러한 방법을 수행하기 위한 전기 회전 기계 |
| KR102850482B1 (ko) * | 2024-07-10 | 2025-08-28 | 자화전자(주) | 모터제어장치 및 인버터 제어방법 |
| WO2026014864A1 (ko) * | 2024-07-10 | 2026-01-15 | 자화전자 주식회사 | 모터제어장치 및 인버터 제어방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11223314B2 (en) | 2022-01-11 |
| EP3656050B1 (de) | 2022-06-01 |
| EP3656050A1 (de) | 2020-05-27 |
| DE102017212574A1 (de) | 2019-01-24 |
| JP2020527324A (ja) | 2020-09-03 |
| CN110892630A (zh) | 2020-03-17 |
| CN110892630B (zh) | 2023-03-14 |
| US20200136548A1 (en) | 2020-04-30 |
| WO2019015894A1 (de) | 2019-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200029468A (ko) | 전기 기계 | |
| US5929590A (en) | Method and apparatus for implementing sensorless control of a switched reluctance machine | |
| KR20100059910A (ko) | 전기 컨버터 구동 방법과 그 장치 | |
| JP5837190B2 (ja) | 電気励磁式電気機械の相電流経過と励磁電流経過を測定するための方法及び装置 | |
| JP7094356B2 (ja) | 電動式の機械 | |
| EP3069442B1 (en) | Method and apparatus for control of switched reluctance motors | |
| US8810180B2 (en) | Electric motor operation apparatus and method | |
| KR101422942B1 (ko) | 모터 구동 제어 장치, 모터 구동 제어 방법 및 그를 이용한 모터 | |
| CN115668720B (zh) | 平面驱动系统和用于运行平面驱动系统的方法 | |
| KR20220019692A (ko) | 전기 회전 기계의 회전자 위치를 결정하는 방법 및 이러한 방법을 수행하기 위한 전기 회전 기계 | |
| CN107769672B (zh) | 用于运行电机的方法以及电机 | |
| US5793169A (en) | Method and apparatus for controlling static electronic components for phase switching in a three-phase brushless electric motor | |
| JP3146887B2 (ja) | 直流ブラシレスモータの駆動装置 | |
| KR20130143705A (ko) | 외부 또는 하이브리드 여기식 전기 기계의 작동 방법 및 장치 | |
| KR102250040B1 (ko) | 회전하는 브러시리스 전기 기계의 작동 방법 및 상기 전기 기계를 구동 제어하기 위한 장치 | |
| KR102277350B1 (ko) | 전자적으로 정류된 동기 기계를 동작시키는 방법, 및 작동 회로 | |
| US10944351B2 (en) | Motor drive control device and motor drive control method | |
| US10014806B2 (en) | Stepping motor driving device and timepiece | |
| US11404990B2 (en) | Method for operating an electric synchronous machine | |
| US11012014B2 (en) | Motor drive unit of a DC electric motor | |
| KR102238456B1 (ko) | 스위치드 릴럭턴스 모터를 구동하는 구동 회로 | |
| US6064164A (en) | Brushless d.c. motor | |
| KR20210073596A (ko) | 무브러시 영구 자석 모터의 제어 방법 | |
| JP2020202701A (ja) | 電動機 | |
| JP2004088849A (ja) | Srモータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200116 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |