KR20200033571A - Sml 비용함수 및 가설검증을 고려한 신호개수 추정 방법 및 장치 - Google Patents
Sml 비용함수 및 가설검증을 고려한 신호개수 추정 방법 및 장치 Download PDFInfo
- Publication number
- KR20200033571A KR20200033571A KR1020180113008A KR20180113008A KR20200033571A KR 20200033571 A KR20200033571 A KR 20200033571A KR 1020180113008 A KR1020180113008 A KR 1020180113008A KR 20180113008 A KR20180113008 A KR 20180113008A KR 20200033571 A KR20200033571 A KR 20200033571A
- Authority
- KR
- South Korea
- Prior art keywords
- signals
- sml
- cost function
- signal
- arrival angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/04—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Description

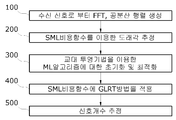
도 2는 도 1의 공분산행렬의 생성단계(100) 구성도
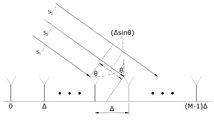
도 3은 ULA 안테나의 구조도
도 4는 도 1의 신호개수 추정 단계(400 및 500)의 실행 과정도







Claims (1)
- 수신신호의 공분산행렬에 SML 비용함수를 이용하여 초기 도래각 추정치를 결정하는 단계,
결정된 초기 도래각 추정치를 이용해서 SML 비용함수에 GLRT 방법을 적용하여서 신호개수를 추정하되, 추정치가 문턱값보다 클 경우, 신호개수를 하나 추가한 후 교대투영 기법을 이용해서 도래각 추정을 계속적으로 수행하고, 문턱값보다 크지 않을 경우에는 신호개수 추정을 종료하는 단계를 포함하는, SML 비용함수 및 가설검증을 고려한 신호개수 추정 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180113008A KR102471995B1 (ko) | 2018-09-20 | 2018-09-20 | Sml 비용함수 및 가설검증을 고려한 신호개수 추정 방법 및 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180113008A KR102471995B1 (ko) | 2018-09-20 | 2018-09-20 | Sml 비용함수 및 가설검증을 고려한 신호개수 추정 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200033571A true KR20200033571A (ko) | 2020-03-30 |
| KR102471995B1 KR102471995B1 (ko) | 2022-11-30 |
Family
ID=70003472
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180113008A Active KR102471995B1 (ko) | 2018-09-20 | 2018-09-20 | Sml 비용함수 및 가설검증을 고려한 신호개수 추정 방법 및 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102471995B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220154962A (ko) | 2021-05-14 | 2022-11-22 | 국방과학연구소 | 수신 신호에 대한 공분산 행렬의 고유값의 차이와 차이의 평균을 이용한 신호 추정 방법 및 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080063000A (ko) * | 2006-12-29 | 2008-07-03 | 세종대학교산학협력단 | 도래각 추정 장치 및 그 방법 |
| KR100912251B1 (ko) * | 2009-02-25 | 2009-08-17 | 국방과학연구소 | 도래각 추정 방법, 표적 탐지 방법 및 도래각 추정 장치 |
| KR20160012284A (ko) * | 2014-07-23 | 2016-02-03 | 국방과학연구소 | 송신신호 파형의 직교성을 이용한 재머 신호 억제 및 원신호 도래각 추정 방법 및 장치 |
| KR101783777B1 (ko) * | 2016-05-17 | 2017-10-10 | 국방과학연구소 | 공분산 Fitting을 통한 도래각 추정 방법 |
-
2018
- 2018-09-20 KR KR1020180113008A patent/KR102471995B1/ko active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080063000A (ko) * | 2006-12-29 | 2008-07-03 | 세종대학교산학협력단 | 도래각 추정 장치 및 그 방법 |
| KR100912251B1 (ko) * | 2009-02-25 | 2009-08-17 | 국방과학연구소 | 도래각 추정 방법, 표적 탐지 방법 및 도래각 추정 장치 |
| KR20160012284A (ko) * | 2014-07-23 | 2016-02-03 | 국방과학연구소 | 송신신호 파형의 직교성을 이용한 재머 신호 억제 및 원신호 도래각 추정 방법 및 장치 |
| KR101783777B1 (ko) * | 2016-05-17 | 2017-10-10 | 국방과학연구소 | 공분산 Fitting을 통한 도래각 추정 방법 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220154962A (ko) | 2021-05-14 | 2022-11-22 | 국방과학연구소 | 수신 신호에 대한 공분산 행렬의 고유값의 차이와 차이의 평균을 이용한 신호 추정 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102471995B1 (ko) | 2022-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101562904B1 (ko) | 도래각 측정 장치 및 방법 | |
| Tirer et al. | High resolution direct position determination of radio frequency sources | |
| JP5600866B2 (ja) | 探知測距装置および探知測距方法 | |
| US8669901B2 (en) | Method for determining azimuth and elevation angles of arrival of coherent sources | |
| KR102099388B1 (ko) | 안테나 어레이 외삽을 이용한 레이더 수신신호의 도착방향 추정 방법 및 장치 | |
| JP2019117055A (ja) | 推定方法、推定装置およびプログラム | |
| KR102262197B1 (ko) | Fmcw 레이다의 신호를 활용하여 표적의 형상을 추정하는 장치 및 그 방법 | |
| JP4709117B2 (ja) | レーダ装置及び測角装置 | |
| KR101897763B1 (ko) | 레이더를 이용한 거리 측정 방법 및 장치 | |
| CN115707989A (zh) | 用于确定到达方向角的方法和设备 | |
| JP7056212B2 (ja) | 方位推定方法および装置 | |
| JP2010127771A (ja) | 合成開口ソーナー、合成開口ソーナーの位相誤差補正方法及びプログラム | |
| CN114390463A (zh) | 一种室内多目标被动式定位方法、系统及电子设备 | |
| US6744407B2 (en) | Method and device for space-time estimation of one or more transmitters | |
| CN111007487B (zh) | 一种基于时间反演的多基地雷达目标检测方法 | |
| KR102577357B1 (ko) | 레이더 시스템의 신호 개수 추정 방법 및 장치 | |
| CN116559793A (zh) | 雷达干扰的抑制方法、装置及存储介质 | |
| KR102471995B1 (ko) | Sml 비용함수 및 가설검증을 고려한 신호개수 추정 방법 및 장치 | |
| US12298391B2 (en) | Doppler compensation system and doppler compensation method | |
| KR102097080B1 (ko) | 가상 채널을 이용한 다중 송수신 어레이 안테나 레이더 장치 및 그 방법 | |
| Olbrich et al. | New pre-estimation algorithm for FMCW radar systems using the matrix pencil method | |
| KR20220017777A (ko) | 타켓 위치 결정 장치 및 방법 | |
| JP7518511B2 (ja) | 通信装置、情報処理方法、及びプログラム | |
| CN116148756A (zh) | 用于确定到达方向角的方法和设备 | |
| JP2023113550A (ja) | 通信装置、情報処理方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180920 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210915 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20180920 Comment text: Patent Application |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20221024 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20221124 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20221125 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |