KR20200033601A - 영상 처리 장치 및 방법 - Google Patents
영상 처리 장치 및 방법 Download PDFInfo
- Publication number
- KR20200033601A KR20200033601A KR1020180113084A KR20180113084A KR20200033601A KR 20200033601 A KR20200033601 A KR 20200033601A KR 1020180113084 A KR1020180113084 A KR 1020180113084A KR 20180113084 A KR20180113084 A KR 20180113084A KR 20200033601 A KR20200033601 A KR 20200033601A
- Authority
- KR
- South Korea
- Prior art keywords
- parameter value
- camera
- image
- general
- depth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
- G06T7/596—Depth or shape recovery from multiple images from stereo images from three or more stereo images
-
- G06T5/006—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/80—Geometric correction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10048—Infrared image
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geometry (AREA)
- Image Processing (AREA)
- Studio Devices (AREA)
Abstract
본 발명의 일 실시예에 따른 영상 처리 장치는, 제1 시점에서 객체를 촬영하여 적외선 영상을 획득하는 적외선 카메라; 제2 시점에서 상기 객체를 촬영하여 제1 깊이 영상을 획득하는 깊이 카메라; 상기 적외선 영상으로부터 상기 객체에 대한 제1 특징 데이터를 추출하고, 상기 제1 특징 데이터로부터 광각 파라미터 값 및 제1 일반 파라미터 값을 계산하고, 상기 제1 깊이 영상으로부터 상기 객체에 대한 제2 특징 데이터를 추출하고, 상기 제2 특징 데이터로부터 제2 일반 파라미터 값을 계산하고, 상기 적외선 카메라와 상기 깊이 카메라 사이의 위치 정보 및 회전 정보 중 적어도 하나를 포함하는 제3 파라미터 값을 계산하고, 상기 제1 일반 파라미터 값, 상기 제2 일반 파라미터 값, 및 상기 제3 파라미터 값에 기초하여 상기 제1 깊이 영상으로부터 상기 제1 시점에 대응하는 제2 깊이 영상을 생성하고, 상기 광각 파라미터 값에 기초하여 상기 제2 깊이 영상으로부터 상기 적외선 영상에 대응하도록 왜곡된 제3 깊이 영상을 생성하는 프로세서; 및 상기 제3 깊이 영상을 저장하는 메모리;를 포함한다.
Description
본 발명의 실시예들은 영상 처리 장치 및 방법에 관한 것이다.
객체를 인식하기 위한 다양한 방법이 개발되고 있다.
예를 들어, 객체가 장비를 착용한 경우, 장비를 통해 객체를 인식하는 방법이 있는데, 이는 객체가 소정 동작을 취함에 있어서 불편을 야기하며, 객체마다 장비가 초기화되어야 할 필요가 있어 번거롭다.
한편, 카메라로부터 획득된 영상에 기초하여 객체를 인식하는 방법이 있다. 이는 영상으로부터 객체를 추론하는 방법으로서, 보다 정확한 객체 인식을 위한 알고리즘의 개발이 요구된다.
본 발명의 실시예들은 보다 정확한 객체 인식을 위한 영상 처리 장치 및 방법을 제공하고자 한다.
본 발명의 일 실시예에 따른 영상 처리 장치는, 제1 시점에서 객체를 촬영하여 적외선 영상을 획득하는 적외선 카메라; 제2 시점에서 상기 객체를 촬영하여 제1 깊이 영상을 획득하는 깊이 카메라; 상기 적외선 영상으로부터 상기 객체에 대한 제1 특징 데이터를 추출하고, 상기 제1 특징 데이터로부터 광각 파라미터 값 및 제1 일반 파라미터 값을 계산하고, 상기 제1 깊이 영상으로부터 상기 객체에 대한 제2 특징 데이터를 추출하고, 상기 제2 특징 데이터로부터 제2 일반 파라미터 값을 계산하고, 상기 적외선 카메라와 상기 깊이 카메라 사이의 위치 정보 및 회전 정보 중 적어도 하나를 포함하는 제3 파라미터 값을 계산하고, 상기 제1 일반 파라미터 값, 상기 제2 일반 파라미터 값, 및 상기 제3 파라미터 값에 기초하여 상기 제1 깊이 영상으로부터 상기 제1 시점에 대응하는 제2 깊이 영상을 생성하고, 상기 광각 파라미터 값에 기초하여 상기 제2 깊이 영상으로부터 상기 적외선 영상에 대응하도록 왜곡된 제3 깊이 영상을 생성하는 프로세서; 및 상기 제3 깊이 영상을 저장하는 메모리;를 포함한다.
본 실시예에서, 상기 광각 파라미터 값은 광각 카메라 매트릭스 및 광각 카메라 왜곡 상수를 포함하고, 상기 제1 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다.
본 실시예에서, 상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보를 포함하고, 상기 프로세서는  ,
,  ,
,  을 이용하여 상기 광각 카메라 왜곡 상수(
을 이용하여 상기 광각 카메라 왜곡 상수( )를 계산하고, x, y, z는 꼭지점의 좌표 정보,
)를 계산하고, x, y, z는 꼭지점의 좌표 정보,  ,
,  ,
,  ,
,  일 수 있다.
일 수 있다.
본 실시예에서, 상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보를 포함하고, 상기 프로세서는  ,
,  을 이용하여 상기 일반 카메라 왜곡 상수(
을 이용하여 상기 일반 카메라 왜곡 상수( )를 계산하고,
)를 계산하고,  ,
,  ,
,  일 수 있다.
일 수 있다.
본 실시예에서, 상기 제2 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다.
본 실시예에서, 상기 제2 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고, 상기 프로세서는  ,
,  을 이용하여 상기 일반 카메라 왜곡 상수(
을 이용하여 상기 일반 카메라 왜곡 상수( )를 계산하고,
)를 계산하고,  ,
,  ,
,  일 수 있다.
일 수 있다.
본 실시예에서, 상기 메모리는 상기 제3 깊이 영상을 영상 정보 및 좌표 정보 중 적어도 하나의 형태로 저장할 수 있다.
본 실시예에서, 상기 적외선 카메라는 120도 이상의 화각을 갖는 광각 렌즈를 통해 상기 객체를 촬영할 수 있다.
본 발명의 일 실시예에 따른 영상 처리 방법은, 적외선 카메라에 의해, 제1 시점에서 객체를 촬영하여 적외선 영상을 획득하는 단계; 프로세서에 의해, 상기 적외선 영상으로부터 상기 객체에 대한 제1 특징 데이터를 추출하고, 상기 제1 특징 데이터로부터 광각 파라미터 값 및 제1 일반 파라미터 값을 계산하는 단계; 깊이 카메라에 의해, 제2 시점에서 상기 객체를 촬영하여 제1 깊이 영상을 획득하는 단계; 상기 프로세서에 의해, 상기 제1 깊이 영상으로부터 상기 객체에 대한 제2 특징 데이터를 추출하고, 상기 제2 특징 데이터로부터 제2 일반 파라미터 값을 계산하는 단계; 상기 프로세서에 의해, 상기 적외선 카메라와 상기 깊이 카메라 사이의 위치 정보 및 회전 정보 중 적어도 하나를 포함하는 제3 파라미터 값을 계산하는 단계; 상기 프로세서에 의해, 상기 제1 일반 파라미터 값, 상기 제2 일반 파라미터 값, 및 상기 제3 파라미터 값에 기초하여 상기 제1 깊이 영상으로부터 상기 제1 시점에 대응하는 제2 깊이 영상을 생성하는 단계; 상기 프로세서에 의해, 상기 광각 파라미터 값에 기초하여 상기 제2 깊이 영상으로부터 상기 적외선 영상에 대응하도록 왜곡된 제3 깊이 영상을 생성하는 단계; 및 메모리에 의해, 상기 제3 깊이 영상을 저장하는 단계;를 포함한다.
본 실시예에서, 상기 광각 파라미터 값은 광각 카메라 매트릭스 및 광각 카메라 왜곡 상수를 포함하고, 상기 제1 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다.
본 실시예에서, 상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고, 상기 프로세서는  ,
,  ,
,  을 이용하여 상기 광각 카메라 왜곡 상수(
을 이용하여 상기 광각 카메라 왜곡 상수( )를 계산하고,
)를 계산하고,  ,
,  ,
,  ,
,  일 수 있다.
일 수 있다.
본 실시예에서, 상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고, 상기 프로세서는  ,
, 을 이용하여 상기 일반 카메라 왜곡 상수(
을 이용하여 상기 일반 카메라 왜곡 상수( )를 계산하고,
)를 계산하고,  ,
,  ,
,  일 수 있다.
일 수 있다.
본 실시예에서, 상기 제2 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다.
본 실시예에서, 상기 제2 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고, 상기 프로세서는  ,
, 을 이용하여 상기 일반 카메라 왜곡 상수(
을 이용하여 상기 일반 카메라 왜곡 상수( )를 계산하고,
)를 계산하고,  ,
,  ,
,  일 수 있다.
일 수 있다.
본 실시예에서, 상기 제3 깊이 영상을 저장하는 단계는, 상기 제3 깊이 영상을 영상 정보 및 좌표 정보 중 적어도 하나의 형태로 저장하는 단계일 수 있다.
본 실시예에서, 상기 적외선 카메라는 120도 이상의 화각을 갖는 광각 렌즈를 통해 상기 객체를 촬영할 수 있다.
본 발명의 실시예들에 따르면, 보다 정확한 객체 인식이 가능한 영상 처리 장치 및 방법을 제공할 수 있다.
도 1은 본 발명의 일 실시예에 따른 적외선 카메라 및 깊이 카메라 각각의 촬영 동작을 설명하기 위한 도면이다.
도 2는 본 발명의 일 실시예에 따른 영상 처리 장치를 개략적으로 도시한 블록도이다.
도 3은 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값을 설명하기 위한 도면이다.
도 4는 본 발명의 일 실시예에 따른 카메라의 외부 파라미터 값을 설명하기 위한 도면이다.
도 5는 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값 및 외부 파라미터 값의 산출을 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값 및 외부 파라미터 값의 적용을 설명하기 위한 도면이다.
도 7은 본 발명의 일 실시예에 따른 제3 깊이 영상 저장 형태를 설명하기 위한 도면이다.
도 8은 본 발명의 일 실시예에 따른 영상 처리 방법을 설명하기 위한 흐름도이다.
도 2는 본 발명의 일 실시예에 따른 영상 처리 장치를 개략적으로 도시한 블록도이다.
도 3은 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값을 설명하기 위한 도면이다.
도 4는 본 발명의 일 실시예에 따른 카메라의 외부 파라미터 값을 설명하기 위한 도면이다.
도 5는 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값 및 외부 파라미터 값의 산출을 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값 및 외부 파라미터 값의 적용을 설명하기 위한 도면이다.
도 7은 본 발명의 일 실시예에 따른 제3 깊이 영상 저장 형태를 설명하기 위한 도면이다.
도 8은 본 발명의 일 실시예에 따른 영상 처리 방법을 설명하기 위한 흐름도이다.
본 발명은 다양한 변환을 가할 수 있고 여러 가지 실시 예를 가질 수 있는 바, 특정 실시 예들을 도면에 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변환, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. 본 발명을 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.
이하의 실시예에서, 제1, 제2 등의 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 구성요소들은 용어들에 의해 한정되어서는 안 된다. 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다.
이하의 실시예에서 사용한 용어는 단지 특정한 실시 예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 다수의 표현을 포함한다. 이하의 실시예에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
본 발명의 실시예들은 기능적인 블록 구성들 및 다양한 처리 단계들로 나타내어질 수 있다. 이러한 기능 블록들은 특정 기능들을 실행하는 다양한 개수의 하드웨어 또는/및 소프트웨어 구성들로 구현될 수 있다. 예를 들어, 본 발명의 실시예들은 하나 이상의 마이크로프로세서들의 제어 또는 다른 제어 장치들에 의해서 다양한 기능들을 실행할 수 있는, 메모리, 프로세싱, 로직(logic), 룩업 테이블(look-up table) 등과 같은 직접 회로 구성들을 채용할 수 있다. 본 발명의 실시예의 구성 요소들이 소프트웨어 프로그래밍 또는 소프트웨어 요소들로 실행될 수 있는 것과 유사하게, 본 발명의 실시예는 데이터 구조, 프로세스들, 루틴들 또는 다른 프로그래밍 구성들의 조합으로 구현되는 다양한 알고리즘을 포함하여, C, C++, 자바(Java), 어셈블러(assembler) 등과 같은 프로그래밍 또는 스크립팅 언어로 구현될 수 있다. 기능적인 측면들은 하나 이상의 프로세서들에서 실행되는 알고리즘으로 구현될 수 있다. 또한, 본 발명의 실시예들은 전자적인 환경 설정, 신호 처리, 및/또는 데이터 처리 등을 위하여 종래 기술을 채용할 수 있다. 매커니즘, 요소, 수단, 구성과 같은 용어는 넓게 사용될 수 있으며, 기계적이고 물리적인 구성들로서 한정되는 것은 아니다. 상기 용어는 프로세서 등과 연계하여 소프트웨어의 일련의 처리들(routines)의 의미를 포함할 수 있다.
이하 첨부된 도면들을 참조하여 본 발명의 여러 가지 실시 예를 상세히 설명한다.
도 1은 본 발명의 일 실시예에 따른 적외선 카메라(110) 및 깊이 카메라(120) 각각의 촬영 동작을 설명하기 위한 도면이다.
도 1을 참조하면, 적외선 카메라(110)는 객체(1)를 촬영하여 적외선 영상(10)을 획득할 수 있다.
객체(1)는 복수의 정방형 격자 무늬들을 가지는 체스 보드일 수 있으며, 이에 한정하지 않는다. 객체(1)는 깊이 차가 없는 체스 보드일 수도 있고, 깊이 차가 있는 체스 보드일 수도 있다.
적외선 카메라(110)는 어안 렌즈를 포함할 수 있다. 어안 렌즈는 120도 이상의 화각(angle of view)을 갖는 렌즈일 수 있다. 적외선 카메라(110)는 어안 렌즈를 통해 제1 영역(110a)을 촬영할 수 있다.
깊이 카메라(120)는 객체(1)를 촬영하여 제1 깊이 영상(20)을 획득할 수 있다.
깊이 카메라(120)는 일반 렌즈를 포함할 수 있다. 일반 렌즈는 120도 미만의 화각을 갖는 렌즈일 수 있다. 깊이 카메라(120)는 일반 렌즈를 통해 제2 영역(120a)을 촬영할 수 있다. 제2 영역(120a)은 제1 영역(110a)보다 작을 수 있다.
어안 렌즈를 통해 획득된 적외선 영상(10)의 왜곡의 정도와 일반 렌즈를 통해 획득된 제1 깊이 영상(20)의 왜곡의 정도는 서로 상이할 수 있다. 상세하게는, 적외선 영상(10)의 왜곡이 제1 깊이 영상(20)의 왜곡보다 심할 수 있다.
적외선 카메라(110)와 깊이 카메라(120)는 서로 상이한 시점(point of view)에서 객체(1)를 촬영할 수 있다. 예를 들어, 적외선 카메라(110)는 제1 시점에서 객체(1)를 촬영할 수 있고, 깊이 카메라(120)는 제1 시점과 상이한 제2 시점에서 객체(1)를 촬영할 수 있다.
이에 따라, 영상 처리 장치(100, 도 2)가 적외선 영상(10)에 포함된 객체(1)의 깊이 값을 얻기 위하여 제1 깊이 영상(20)을 이용하는 경우 오차가 발생할 수 있다.
이하에서, 왜곡의 정도와 획득된 시점이 서로 상이한 적외선 영상(10)과 제1 깊이 영상(20)을 보다 정확하게 정합함으로써, 적외선 영상(10)에 포함된 객체(1)의 깊이 갚을 정확하게 학습할 수 있는 본 발명의 실시예들에 대하여 상세하게 설명한다.
도 2는 본 발명의 일 실시예에 따른 영상 처리 장치(100)를 개략적으로 도시한 블록도이다.
도 1 및 도 2를 참조하면, 영상 처리 장치(100)는 적외선 카메라(110), 깊이 카메라(120), 프로세서(130), 및 메모리(140)를 포함한다.
적외선 카메라(110)는 제1 시점에서 객체(1)를 촬영하여 적외선 영상(10)을 획득한다. 적외선 카메라(110)는 120도 이상의 화각을 갖는 광각 렌즈를 통해 객체(1)를 촬영할 수 있다.
적외선 영상(10)은 어안 렌즈로 인한 왜곡을 가질 수 있다. 어안 렌즈를 통해 촬영된 적외선 영상(10)은 외곽으로 갈수록 왜곡의 편차가 심해질 수 있다. 어안 렌즈를 통해 보다 넓은 영역이 촬영된 적외선 영상(10)을 얻을 수 있다.
깊이 카메라(120)는 제2 시점에서 객체(1)를 촬영하여 제1 깊이 영상(20)을 획득한다. 적외선 카메라(110)는 일반 렌즈를 통해 객체(1)를 촬영할 수 있다.
제1 깊이 영상(20)은 일반 렌즈로 인한 왜곡을 가질 수 있다.
프로세서(130)는 왜곡의 정도와 획득된 시점이 적외선 영상(10)과 동일한 제3 깊이 영상(24, 도 6)을 생성하기 위하여, 제1 깊이 영상(20)에 대하여 일반 렌즈로 인한 왜곡을 보정하고, 위치와 회전을 보정하고, 광각 렌즈로 인한 왜곡을 적용할 수 있다.
프로세서(130)는 제1 깊이 영상(20)에 대하여 카메라의 내부 파라미터 값을 이용한 렌즈 왜곡 보정, 카메라의 외부 파라미터 값을 이용한 위치 보정 및/또는 회전 보정, 및 카메라의 내부 파라미터 값을 이용한 렌즈 왜곡 적용을 수행함으로써, 적외선 영상(10)에 대응하도록 왜곡된 제3 깊이 영상(24, 도 6)을 생성할 수 있다.
다시 말해, 프로세서(130)는 제1 깊이 영상(20)에 대하여, 일반 렌즈에 의한 왜곡을 보정하고 어안 렌즈에 의한 왜곡을 적용함으로써 적외선 영상(10)과 왜곡의 정도가 동일한 제3 깊이 영상(24, 도 6)을 생성할 수 있고, 위치 보정 및/또는 회전 보정을 수행함으로써 적외선 영상(10)과 시점이 동일한 제3 깊이 영상(24, 도 6)을 생성할 수 있다.
이를 위해, 이하에서는, 도 3 내지 도 5를 참조하여, 제1 깊이 영상(20)에 적용되는 카메라의 내부 파라미터 값 및 외부 파라미터 값에 대하여 상세하게 설명한다.
도 3은 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값을 설명하기 위한 도면이다.
도 3을 참조하면, 렌즈의 왜곡 중심 C( ,
,  )을 기준으로 3차원 상의 하나의 꼭지점 P(x, y, z)가 초점 거리가 f인 렌즈를 통해 2차원의 영상 평면에 투영될 때, 2차원의 영상 평면에 맺히는 점 p는 수학식 1과 같이 구할 수 있다.
)을 기준으로 3차원 상의 하나의 꼭지점 P(x, y, z)가 초점 거리가 f인 렌즈를 통해 2차원의 영상 평면에 투영될 때, 2차원의 영상 평면에 맺히는 점 p는 수학식 1과 같이 구할 수 있다.
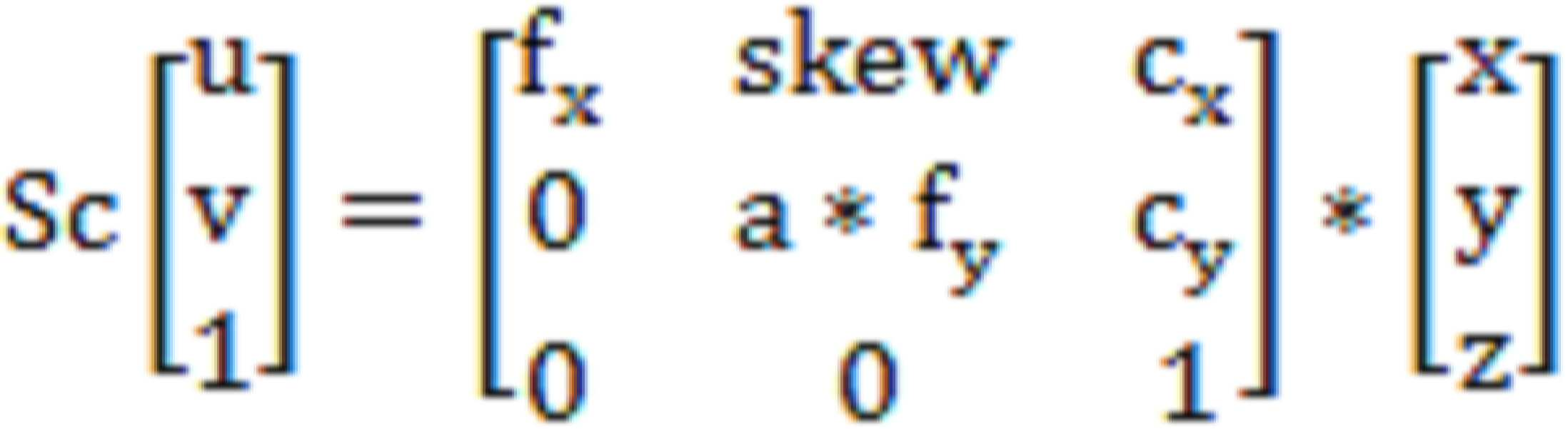
수학식 1에서, 등식의 오른쪽 단 첫 번째 매트릭스는 카메라 매트릭스를 나타내며,  는 스큐 파라미터 값을,
는 스큐 파라미터 값을,  는 아스펙트 비율 값을,
는 아스펙트 비율 값을,  와
와  는 초점 거리를,
는 초점 거리를,  와
와  는 렌즈의 광학 중심점 좌표를,
는 렌즈의 광학 중심점 좌표를,  는 스케일을 의미한다.
는 스케일을 의미한다.  는
는  ,
,  ,
,  ,
,  와 관련된 함수로 나타낼 수 있으며, 샘플링에 따라서
와 관련된 함수로 나타낼 수 있으며, 샘플링에 따라서  ,
,  ,
,  ,
,  의 값을 일정 비율로 곱하거나 나눌 수 있다.
의 값을 일정 비율로 곱하거나 나눌 수 있다.
3차원 상의 하나의 꼭지점 P(x, y, z)가 카메라 좌표계로 투영된 렌즈 평면 상의 좌표 (x', y')(도 3에 도시하지 않음)와 3차원 상의 하나의 꼭지점 P(x, y, z) 간에는 수학식 2와 같은 비례식이 성립할 수 있다.
즉, 카메라의 내부 파라미터  ,
,  ,
,  ,
,  를 이용하여 2차원 영상 평면 상의 좌표 p(u, v)를 얻을 수 있다. 이때, 2차원 영상 평면 상의 좌표 p는 렌즈로 인해 실제 왜곡이 발생되는 영상 평면상의 좌표로서, 왜곡이 발생되지 않은 영상 평면상의 좌표 p'와 일치하지 않을 수 있다. p와 p'의 일치를 위하여 카메라의 왜곡 상수가 이용될 수 있다.
를 이용하여 2차원 영상 평면 상의 좌표 p(u, v)를 얻을 수 있다. 이때, 2차원 영상 평면 상의 좌표 p는 렌즈로 인해 실제 왜곡이 발생되는 영상 평면상의 좌표로서, 왜곡이 발생되지 않은 영상 평면상의 좌표 p'와 일치하지 않을 수 있다. p와 p'의 일치를 위하여 카메라의 왜곡 상수가 이용될 수 있다.
먼저, 일반 렌즈를 포함하는 카메라의 왜곡 상수 즉, 일반 카메라 왜곡 상수  는 수학식 4와 같이 계산될 수 있다.
는 수학식 4와 같이 계산될 수 있다.
수학식 4에서, x', y'는 좌표 p에 대응하고, x'', y''는 좌표 p'에 대응하고,  이고,
이고,  ,
,  ,
,  는 방사상 왜곡 상수를,
는 방사상 왜곡 상수를,  ,
,  는 접선 방향 왜곡 상수를 나타낼 수 있다. 이때, x', y'는 u, v를 구하기 위한 변수일 수 있습니다.
는 접선 방향 왜곡 상수를 나타낼 수 있다. 이때, x', y'는 u, v를 구하기 위한 변수일 수 있습니다.
한편, 어안 렌즈를 포함하는 카메라의 왜곡 상수 즉, 광각 카메라 왜곡 상수  는 수학식 5와 같이 계산될 수 있다.
는 수학식 5와 같이 계산될 수 있다.
수학식 5에서, x', y'는 좌표 p에 대응하고, x'', y''는 좌표 p'에 대응하고,  ,
,  이고,
이고,  는 방사상 왜곡 상수를 나타낼 수 있다.
는 방사상 왜곡 상수를 나타낼 수 있다.
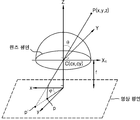
도 4는 본 발명의 일 실시예에 따른 카메라의 외부 파라미터 값을 설명하기 위한 도면이다.
도 4를 참조하면, 적외선 카메라(110)는  의 위치에서 객체(1)를 촬영하여 적외선 영상(10)을 획득할 수 있다. 적외선 영상(10)은 영상의 중심을 나타내는 표시(C10)를 포함할 수 있다. 적외선 영상(10)은 객체(1)의 꼭지점 P에 대응하는
의 위치에서 객체(1)를 촬영하여 적외선 영상(10)을 획득할 수 있다. 적외선 영상(10)은 영상의 중심을 나타내는 표시(C10)를 포함할 수 있다. 적외선 영상(10)은 객체(1)의 꼭지점 P에 대응하는  를 포함할 수 있다.
를 포함할 수 있다.
깊이 카메라(120)는  의 위치에서 객체(1)를 촬영하여 제1 깊이 영상(20)을 획득할 수 있다. 제1 깊이 영상(20)은 영상의 중심을 나타내는 표시(C20)를 포함할 수 있다. 제1 깊이 영상(20)은 객체(1)의 꼭지점 P에 대응하는
의 위치에서 객체(1)를 촬영하여 제1 깊이 영상(20)을 획득할 수 있다. 제1 깊이 영상(20)은 영상의 중심을 나타내는 표시(C20)를 포함할 수 있다. 제1 깊이 영상(20)은 객체(1)의 꼭지점 P에 대응하는  를 포함할 수 있다.
를 포함할 수 있다.
프로세서(130)는 제1 깊이 영상(20)이 적외선 영상(10)에 대응되는 크기로 보상된 영상(30)을 생성할 수 있다.
깊이 카메라(120)는 적외선 카메라(110)로부터 T만큼 이동된 위치에 있을 수 있다. 즉, T는 적외선 카메라(110)와 깊이 카메라(120) 사이의 위치 정보를 나타낼 수 있다.
제1 깊이 영상(20) 및 제1 깊이 영상(20)이 적외선 영상(10)에 대응되는 크기로 보상된 영상(30)은 적외선 영상(10)에 비해 R만큼 회전된 영상일 수 있다. 즉, R은 적외선 카메라(110)와 깊이 카메라(120) 사이의 회전 정보를 나타낼 수 있다.
이에 따라, 수학식 6과 같은 관계가 성립될 수 있다.
한편, P,  , 및
, 및  를 지나는 에피폴라 평면(epipolar plane)에 대한 성질에 따르면 수학식 7과 같다.
를 지나는 에피폴라 평면(epipolar plane)에 대한 성질에 따르면 수학식 7과 같다.
수학식 6을 변형한  와, R에 대해 성립 가능한
와, R에 대해 성립 가능한  를 수학식 7에 대입한 결과는 수학식 8과 같다.
를 수학식 7에 대입한 결과는 수학식 8과 같다.
한편,  를 만족하는 S는 수학식 9일 수 있다.
를 만족하는 S는 수학식 9일 수 있다.
수학식 9에서,  ,
,  ,
,  는 벡터 T의 x축 성분, y축 성분, 및 z축 성분일 수 있다.
는 벡터 T의 x축 성분, y축 성분, 및 z축 성분일 수 있다.
수학식 9를 이용하여 수학식 8이 수학식 10과 같이 변경될 수 있다.
프로세서(130)는 적외선 카메라(110)에 대한 카메라 보정을 수행함으로써 객체(1)의 꼭지점 P를  로 변환할 수 있고, 깊이 카메라(120)에 대한 카메라 보정을 수행함으로써 객체(1)의 꼭지점 P를
로 변환할 수 있고, 깊이 카메라(120)에 대한 카메라 보정을 수행함으로써 객체(1)의 꼭지점 P를  로 변환할 수 있다.
로 변환할 수 있다.
수학식 11에서,  는 적외선 카메라(110) 및 객체(1)의 꼭지점 P 사이의 회전 정보,
는 적외선 카메라(110) 및 객체(1)의 꼭지점 P 사이의 회전 정보,  는 적외선 카메라(110) 및 객체(1)의 꼭지점 P 사이의 위치 정보일 수 있다.
는 적외선 카메라(110) 및 객체(1)의 꼭지점 P 사이의 위치 정보일 수 있다.  ,
,  는 적외선 카메라(110)의 외부 파라미터의 값일 수 있다.
는 적외선 카메라(110)의 외부 파라미터의 값일 수 있다.
수학식 12에서,  는 깊이 카메라(120) 및 객체(1)의 꼭지점 P 사이의 회전 정보,
는 깊이 카메라(120) 및 객체(1)의 꼭지점 P 사이의 회전 정보,  는 깊이 카메라(120) 및 객체(1)의 꼭지점 P 사이의 위치 정보일 수 있다.
는 깊이 카메라(120) 및 객체(1)의 꼭지점 P 사이의 위치 정보일 수 있다.  ,
,  는 깊이 카메라(120)의 외부 파라미터의 값일 수 있다.
는 깊이 카메라(120)의 외부 파라미터의 값일 수 있다.
수학식 1, 수학식 11, 및 수학식 12로부터 수학식 13 및 수학식 14가 각각 유도될 수 있다.
앞서 설명한 바와 같이, 수학식 11 및 수학식 12에서, R은 적외선 카메라(110)와 깊이 카메라(120) 사이의 회전 정보를, T는 적외선 카메라(110)와 깊이 카메라(120) 사이의 위치 정보를 나타낼 수 있다. 즉, 제3 파라미터 값은 R 및 T 중 적어도 하나를 포함할 수 있다.
수학식 13 및 수학식 14에서 계산된 R 및 T는 객체(1)의 꼭지점 P에 대한 제3 파라미터 값일 수 있다.
도 5는 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값 및 외부 파라미터 값의 산출을 설명하기 위한 도면이다.
도 5를 참조하면, 프로세서(130)는 적외선 영상(10)에 광각 파라미터 값(WI)을 적용함으로써, 어안 렌즈에 의한 왜곡이 보정된 적외선 영상(11)을 생성할 수 있다.
프로세서(130)는 어안 렌즈에 의한 왜곡이 보정된 적외선 영상(11)에 제1 일반 파라미터 값(UI)을 적용함으로써, 어안 렌즈에 의한 왜곡 및 일반 렌즈에 의한 왜곡이 보정된 적외선 영상(12)을 생성할 수 있다.
프로세서(130)는 제1 깊이 영상(20)에 제2 일반 파라미터 값(UD)을 적용함으로써, 일반 렌즈에 의한 왜곡이 보정된 제1 깊이 영상(21)을 생성할 수 있다.
어안 렌즈에 의한 왜곡 및 일반 렌즈에 의한 왜곡이 보정된 적외선 영상(12)의 왜곡의 정도와, 일반 렌즈에 의한 왜곡이 보정된 제1 깊이 영상(21)의 왜곡의 정도는, 오차 범위 내에서 동일할 수 있다.
다시 말해, 왜곡의 정도가 상대적으로 심한 적외선 영상(10)에 두 번의 왜곡 보정이 수행되고, 왜곡의 정도가 상대적으로 약한 제1 깊이 영상(20)에 한 번의 왜곡 보정이 수행됨으로써, 적외선 영상(10)과 제1 깊이 영상(20)의 왜곡의 정도가 오차 범위 내에서 일치될 수 있다.
프로세서(130)는 일반 렌즈에 의한 왜곡이 보정된 제1 깊이 영상(21)에 제3 파라미터 값(Tr)을 적용함으로써, 일반 렌즈에 의한 왜곡이 보정된 제1 깊이 영상(21)의 시점과 어안 렌즈에 의한 왜곡 및 일반 렌즈에 의한 왜곡이 보정된 적외선 영상(12)의 시점을 오차 범위 내에서 일치시킬 수 있다.
도시하지 않았으나, 프로세서(130)는 어안 렌즈에 의한 왜곡 및 일반 렌즈에 의한 왜곡이 보정된 적외선 영상(12)에 제3 파라미터 값(Tr)을 적용함으로써, 일반 렌즈에 의한 왜곡이 보정된 제1 깊이 영상(21)의 시점과 어안 렌즈에 의한 왜곡 및 일반 렌즈에 의한 왜곡이 보정된 적외선 영상(12)의 시점을 오차 범위 내에서 일치시킬 수도 있다.
도 6은 본 발명의 일 실시예에 따른 카메라의 내부 파라미터 값 및 외부 파라미터 값의 적용을 설명하기 위한 도면이다.
도 1, 도 2, 및 도 6을 참조하면, 프로세서(130)는 영상으로부터 특징 데이터를 추출하고, 특징 데이터를 이용하여 왜곡 보정 알고리즘을 구성하는 파라미터 값을 계산한다.
프로세서(130)는 적외선 영상(10)으로부터 객체(1)에 대한 제1 특징 데이터를 추출하고, 제1 특징 데이터로부터 광각 파라미터 값(WI) 및 제1 일반 파라미터 값(UI)을 계산한다.
제1 특징 데이터는 객체(1)를 구성하는 복수의 꼭지점들의 좌표 정보 및 연결 정보를 포함할 수 있다.
광각 파라미터 값(WI)은 적외선 영상(10)의 어안 렌즈에 의한 왜곡을 보정하기 위한 왜곡 보정 알고리즘을 구성할 수 있다. 광각 파라미터 값(WI)은 광각 카메라 매트릭스 및 광각 카메라 왜곡 상수를 포함할 수 있다. 광각 파라미터 값(WI)은 카메라 자체에서 발생하는 왜곡에 대한 내부 파라미터 값일 수 있다.
프로세서(130)는 수학식 1 내지 수학식 4를 이용하여 광각 파라미터 값(WI)을 계산할 수 있다. 광각 카메라 매트릭스는 스큐 파라미터 값, 아스펙트 비율 값, 초점 거리, 렌즈의 광학 중심점 좌표, 및 스케일 중 적어도 하나를 포함할 수 있다. 광각 카메라 왜곡 상수는 방사상 왜곡 상수  를 포함하는 4x1 매트릭스일 수 있다.
를 포함하는 4x1 매트릭스일 수 있다.
제1 일반 파라미터 값(UI)은 적외선 영상(10)의 왜곡을 추가적으로 보정하기 위한 왜곡 보정 알고리즘을 구성할 수 있다. 제1 일반 파라미터 값(UI)은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다. 제1 일반 파라미터 값(UI)은 카메라 자체에서 발생하는 왜곡에 대한 내부 파라미터 값일 수 있다.
프로세서(130)는 수학식 1 내지 수학식 3, 및 수학식 5를 이용하여 제1 일반 파라미터 값(UI)을 계산할 수 있다. 일반 카메라 매트릭스는 스큐 파라미터 값, 아스펙트 비율 값, 초점 거리, 렌즈의 광학 중심점 좌표, 및 스케일 중 적어도 하나를 포함할 수 있다. 일반 카메라 왜곡 상수는 방사상 왜곡 상수 및 접선 방향 왜곡 상수  를 포함하는 1x5 매트릭스일 수 있다.
를 포함하는 1x5 매트릭스일 수 있다.
프로세서(130)는 제1 깊이 영상(20)으로부터 객체(1)에 대한 제2 특징 데이터를 추출하고, 제2 특징 데이터로부터 제2 일반 파라미터 값(UD)을 계산한다.
제2 특징 데이터는 객체(1)를 구성하는 복수의 꼭지점들의 좌표 정보 및 연결 정보를 포함할 수 있다.
제2 일반 파라미터 값(UD)은 제1 깊이 영상(20)의 일반 렌즈에 의한 왜곡을 보정하기 위한 왜곡 보정 알고리즘을 구성할 수 있다. 제2 일반 파라미터 값(UD)은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다. 제2 일반 파라미터 값(UD)은 카메라 자체에서 발생하는 왜곡에 대한 내부 파라미터 값일 수 있다.
프로세서(130)는 수학식 1 내지 수학식 3, 및 수학식 5를 이용하여 제2 일반 파라미터 값(UD)을 계산할 수 있다. 일반 카메라 매트릭스는 스큐 파라미터 값, 아스펙트 비율 값, 초점 거리, 렌즈의 광학 중심점 좌표, 및 스케일 중 적어도 하나를 포함할 수 있다. 일반 카메라 왜곡 상수는 방사상 왜곡 상수 및 접선 방향 왜곡 상수  를 포함하는 1x5 매트릭스일 수 있다.
를 포함하는 1x5 매트릭스일 수 있다.
프로세서(130)는 적외선 카메라(110)와 깊이 카메라(120) 사이의 위치 정보 및 회전 정보 중 적어도 하나를 포함하는 제3 파라미터 값(Tr)을 계산한다. 제3 파라미터 값(Tr)은 서로 다른 카메라 좌표계들 사이의 변환 관계에 대한 외부 파라미터 값일 수 있다.
프로세서(130)는 수학식 13 및 수학식 14와 같이 제3 파라미터 값(Tr)을 계산할 수 있다. 제3 파라미터 값(Tr)은 적외선 카메라(110)와 깊이 카메라(120) 사이의 회전 정보 및 적외선 카메라(110)와 깊이 카메라(120) 사이의 위치 정보 중 적어도 하나를 포함할 수 있다.
프로세서(130)는 제1 일반 파라미터 값(UI), 제2 일반 파라미터 값(UD), 및 제3 파라미터 값(Tr)에 기초하여, 제1 깊이 영상(20)으로부터 제1 시점에 대응하는 제2 깊이 영상(23)을 생성한다.
프로세서(130)는 광각 파라미터 값(WI)에 기초하여 제2 깊이 영상(23)으로부터 적외선 영상(10)에 대응하도록 왜곡된 제3 깊이 영상(24)을 생성한다.
상세하게는, 프로세서(130)는 제2 깊이 영상(23)에 광각 파라미터 값(WI)을 적용하여 적외선 영상(10)에 대응하도록 왜곡된 제3 깊이 영상(24)을 생성할 수 있다. 결과적으로, 제3 깊이 영상(24)은 왜곡의 정도 및 획득된 시점이 적외선 영상(10)에 대응될 수 있다.
메모리(140)는 제3 깊이 영상(24)을 저장한다.
메모리(140)는 제3 깊이 영상(24)을 영상 정보 및 좌표 정보 중 적어도 하나의 형태로 저장할 수 있다. 이하에서, 도 7을 참조하여, 메모리(140)에 저장된 좌표 정보 형태의 제3 깊이 영상(24)에 대하여 상세하게 설명한다.
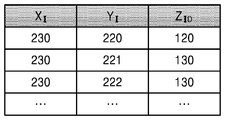
도 7은 본 발명의 일 실시예에 따른 제3 깊이 영상(24) 저장 형태를 설명하기 위한 도면이다.
도 7을 참조하면, 메모리(140)는 적외선 영상(10)의 픽셀 위치와 제3 깊이 영상(24)의 깊이 값이 매핑된 관계 테이블을 저장할 수 있다. XI는 적외선 영상(10)의 픽셀의 x좌표를, YI는 적외선 영상(10)의 픽셀의 y좌표를, ZID는 제3 깊이 영상(24)의 깊이 값을 의미할 수 있다.
예를 들어, 관계 테이블에 기초하여, 적외선 영상(10)의 x좌표가 230, y좌표가 221인 픽셀 위치에서 적외선 카메라(110)로부터 객체(1)까지의 깊이 값은 130임을 알 수 있다.
본 실시예에 따르면, 관계 테이블에 일반 렌즈에 의한 왜곡이 보정된 제1 깊이 영상(21), 제1 시점에 대응하는 일반 렌즈에 의한 왜곡이 보정된 제1 깊이 영상(22), 또는 제1 시점에 대응하는 제2 깊이 영상(23)의 깊이 값을 저장하는 경우보다 객체(1)의 깊이 값을 보다 정확하게 학습할 수 있고, 학습 후에는 적외선 영상(10)만으로 적외선 영상(10)의 깊이 값을 별도의 왜곡 보정 없이도 추론할 수 있기 때문에 보다 빠르게 추론할 수 있다.
도시하지 않았으나, 영상 처리 장치(100)는 관계 테이블을 학습한 후, 손동작 등을 인식하기 위한 추론을 위해 학습된 관계 테이블을 이용할 수 있다.
도 8은 본 발명의 일 실시예에 따른 영상 처리 방법을 설명하기 위한 흐름도이다.
도 1, 도 6, 및 도 8을 참조하면, 적외선 카메라(110)는 제1 시점에서 객체(1)를 촬영하여 적외선 영상(10)을 획득한다(S801).
프로세서(130)는 적외선 영상(10)으로부터 객체(1)에 대한 제1 특징 데이터를 추출하고(S803), 제1 특징 데이터로부터 광각 파라미터 값(WI) 및 제1 일반 파라미터 값(UI)을 계산한다(S805).
제1 특징 데이터는 객체(1)를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함할 수 있다.
광각 파라미터 값(WI)은 광각 카메라 매트릭스 및 광각 카메라 왜곡 상수를 포함하고, 제1 일반 파라미터 값(UI)은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다.
프로세서(130)는 수학식 1을 이용하여 광각 카메라 매트릭스를 계산할 수 있다. 프로세서(130)는 수학식 5를 이용하여 광각 카메라 왜곡 상수를 계산할 수 있다.
프로세서(130)는 수학식 1을 이용하여 일반 카메라 매트릭스를 계산할 수 있다. 프로세서(130)는 수학식 4를 이용하여 일반 카메라 왜곡 상수를 계산할 수 있다.
깊이 카메라(120)는 제2 시점에서 객체(1)를 촬영하여 제1 깊이 영상(20)을 획득한다(S807).
프로세서(130)는 제1 깊이 영상(20)으로부터 객체(1)에 대한 제2 특징 데이터를 추출하고(S809), 제2 특징 데이터로부터 제2 일반 파라미터 값(UD)을 계산한다(S811).
제2 특징 데이터는 객체(1)를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함할 수 있다.
제2 일반 파라미터 값(UD)은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함할 수 있다.
프로세서(130)는 수학식 1을 이용하여 일반 카메라 매트릭스를 계산할 수 있다. 프로세서(130)는 수학식 4를 이용하여 일반 카메라 왜곡 상수를 계산할 수 있다.
S801 내지 S805 및 S807 내지 S811은 순차적으로, 역순으로, 또는 동시에 수행될 수 있으며, 이에 한정하지 않는다.
프로세서(130)는 적외선 카메라(110)와 깊이 카메라(120) 사이의 위치 정보 및 회전 정보 중 적어도 하나를 포함하는 제3 파라미터 값(Tr)을 계산한다(S813).
프로세서(130)는 수학식 13 및 수학식 14를 이용하여 제3 파라미터 값(Tr)을 계산할 수 있다.
프로세서(130)는 제1 일반 파라미터 값(UI), 제2 일반 파라미터 값(UD), 및 제3 파라미터 값(Tr)에 기초하여 제1 깊이 영상(20)으로부터 제1 시점에 대응하는 제2 깊이 영상(23)을 생성한다(S815). 제2 깊이 영상(23)은 수학식 15와 같이 나타낼 수 있다.
이어서, 프로세서(130)는 광각 파라미터 값(WI)에 기초하여 제2 깊이 영상(23)으로부터 적외선 영상(10)에 대응하도록 왜곡된 제3 깊이 영상(24)을 생성한다(S817).
예를 들어, 프로세서(130)는 제2 깊이 영상(23)에 광각 파라미터 값(WI)을 적용하여 적외선 영상(10)에 대응하도록 왜곡된 제3 깊이 영상(24)을 생성할 수 있다. 제3 깊이 영상(24)은 수학식 16과 같이 나타낼 수 있다.
메모리(140)는 제3 깊이 영상(24)을 저장한다(S819).
예를 들어, 메모리(140)는 제3 깊이 영상(24)을 영상 정보 및 좌표 정보 중 적어도 하나의 형태로 저장할 수 있다.
이제까지 본 발명에 대하여 바람직한 실시예를 중심으로 살펴보았다. 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자는 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 변형된 형태로 본 발명을 구현할 수 있음을 이해할 것이다.
그러므로 상기 개시된 실시예는 한정적인 관점이 아니라 설명적인 관점에서 고려되어야 한다. 본 발명의 범위는 전술한 설명이 아니라 특허청구범위에 나타나 있으며, 특허청구범위에 의해 청구된 발명 및 청구된 발명과 균등한 발명들은 본 발명에 포함된 것으로 해석되어야 한다.
1: 객체
10: 적외선 영상
20: 제1 깊이 영상
110: 적외선 카메라
110a: 제1 영역
120: 깊이 카메라
120a: 제2 영역
10: 적외선 영상
20: 제1 깊이 영상
110: 적외선 카메라
110a: 제1 영역
120: 깊이 카메라
120a: 제2 영역
Claims (16)
- 제1 시점에서 객체를 촬영하여 적외선 영상을 획득하는 적외선 카메라;
제2 시점에서 상기 객체를 촬영하여 제1 깊이 영상을 획득하는 깊이 카메라;
상기 적외선 영상으로부터 상기 객체에 대한 제1 특징 데이터를 추출하고, 상기 제1 특징 데이터로부터 광각 파라미터 값 및 제1 일반 파라미터 값을 계산하고, 상기 제1 깊이 영상으로부터 상기 객체에 대한 제2 특징 데이터를 추출하고, 상기 제2 특징 데이터로부터 제2 일반 파라미터 값을 계산하고, 상기 적외선 카메라와 상기 깊이 카메라 사이의 위치 정보 및 회전 정보 중 적어도 하나를 포함하는 제3 파라미터 값을 계산하고, 상기 제1 일반 파라미터 값, 상기 제2 일반 파라미터 값, 및 상기 제3 파라미터 값에 기초하여 상기 제1 깊이 영상으로부터 상기 제1 시점에 대응하는 제2 깊이 영상을 생성하고, 상기 광각 파라미터 값에 기초하여 상기 제2 깊이 영상으로부터 상기 적외선 영상에 대응하도록 왜곡된 제3 깊이 영상을 생성하는 프로세서; 및
상기 제3 깊이 영상을 저장하는 메모리;를 포함하는, 영상 데이터 처리 장치. - 청구항 1에 있어서,
상기 광각 파라미터 값은 광각 카메라 매트릭스 및 광각 카메라 왜곡 상수를 포함하고, 상기 제1 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함하는, 영상 데이터 처리 장치. - 청구항 2에 있어서,
상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보를 포함하고,
상기 프로세서는



을 이용하여 상기 광각 카메라 왜곡 상수()를 계산하고, x, y, z는 꼭지점의 좌표 정보, ,
, ,
, ,
, 인, 영상 데이터 처리 장치.
인, 영상 데이터 처리 장치.
- 청구항 2에 있어서,
상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보를 포함하고,
상기 프로세서는


을 이용하여 상기 일반 카메라 왜곡 상수()를 계산하고, ,
, ,
, 인, 영상 데이터 처리 장치.
인, 영상 데이터 처리 장치.
- 청구항 1에 있어서,
상기 제2 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함하는, 영상 데이터 처리 장치. - 청구항 5에 있어서,
상기 제2 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고,
상기 프로세서는


을 이용하여 상기 일반 카메라 왜곡 상수()를 계산하고, ,
, ,
, 인, 영상 데이터 처리 장치.
인, 영상 데이터 처리 장치.
- 청구항 1에 있어서,
상기 메모리는 상기 제3 깊이 영상을 영상 정보 및 좌표 정보 중 적어도 하나의 형태로 저장하는, 영상 데이터 처리 장치. - 청구항 1에 있어서,
상기 적외선 카메라는 120도 이상의 화각을 갖는 광각 렌즈를 통해 상기 객체를 촬영하는, 영상 데이터 처리 장치. - 적외선 카메라에 의해, 제1 시점에서 객체를 촬영하여 적외선 영상을 획득하는 단계;
프로세서에 의해, 상기 적외선 영상으로부터 상기 객체에 대한 제1 특징 데이터를 추출하고, 상기 제1 특징 데이터로부터 광각 파라미터 값 및 제1 일반 파라미터 값을 계산하는 단계;
깊이 카메라에 의해, 제2 시점에서 상기 객체를 촬영하여 제1 깊이 영상을 획득하는 단계;
상기 프로세서에 의해, 상기 제1 깊이 영상으로부터 상기 객체에 대한 제2 특징 데이터를 추출하고, 상기 제2 특징 데이터로부터 제2 일반 파라미터 값을 계산하는 단계;
상기 프로세서에 의해, 상기 적외선 카메라와 상기 깊이 카메라 사이의 위치 정보 및 회전 정보 중 적어도 하나를 포함하는 제3 파라미터 값을 계산하는 단계;
상기 프로세서에 의해, 상기 제1 일반 파라미터 값, 상기 제2 일반 파라미터 값, 및 상기 제3 파라미터 값에 기초하여 상기 제1 깊이 영상으로부터 상기 제1 시점에 대응하는 제2 깊이 영상을 생성하는 단계;
상기 프로세서에 의해, 상기 광각 파라미터 값에 기초하여 상기 제2 깊이 영상으로부터 상기 적외선 영상에 대응하도록 왜곡된 제3 깊이 영상을 생성하는 단계; 및
메모리에 의해, 상기 제3 깊이 영상을 저장하는 단계;를 포함하는 영상 데이터 처리 방법. - 청구항 9에 있어서,
상기 광각 파라미터 값은 광각 카메라 매트릭스 및 광각 카메라 왜곡 상수를 포함하고, 상기 제1 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함하는, 영상 데이터 처리 방법. - 청구항 10에 있어서,
상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고,
상기 프로세서는



을 이용하여 상기 광각 카메라 왜곡 상수()를 계산하고, ,
, ,
, ,
, 인, 영상 데이터 처리 방법.
인, 영상 데이터 처리 방법.
- 청구항 10에 있어서,
상기 제1 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고,
상기 프로세서는


을 이용하여 상기 일반 카메라 왜곡 상수()를 계산하고, ,
, ,
, 인, 영상 데이터 처리 방법.
인, 영상 데이터 처리 방법.
- 청구항 1에 있어서,
상기 제2 일반 파라미터 값은 일반 카메라 매트릭스 및 일반 카메라 왜곡 상수를 포함하는, 영상 데이터 처리 방법. - 청구항 13에 있어서,
상기 제2 특징 데이터는 상기 객체를 구성하는 복수의 꼭지점들의 좌표 정보(x, y, z)를 포함하고,
상기 프로세서는


을 이용하여 상기 일반 카메라 왜곡 상수()를 계산하고, ,
, ,
, 인, 영상 데이터 처리 방법.
인, 영상 데이터 처리 방법.
- 청구항 9에 있어서,
상기 제3 깊이 영상을 저장하는 단계는,
상기 제3 깊이 영상을 영상 정보 및 좌표 정보 중 적어도 하나의 형태로 저장하는 단계인, 영상 데이터 처리 방법. - 청구항 9에 있어서,
상기 적외선 카메라는 120도 이상의 화각을 갖는 광각 렌즈를 통해 상기 객체를 촬영하는, 영상 데이터 처리 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180113084A KR20200033601A (ko) | 2018-09-20 | 2018-09-20 | 영상 처리 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180113084A KR20200033601A (ko) | 2018-09-20 | 2018-09-20 | 영상 처리 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200033601A true KR20200033601A (ko) | 2020-03-30 |
Family
ID=70003178
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180113084A Withdrawn KR20200033601A (ko) | 2018-09-20 | 2018-09-20 | 영상 처리 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200033601A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111462225A (zh) * | 2020-03-31 | 2020-07-28 | 电子科技大学 | 一种红外光斑图像的质心识别定位方法 |
| US11232315B2 (en) | 2020-04-28 | 2022-01-25 | NextVPU (Shanghai) Co., Ltd. | Image depth determining method and living body identification method, circuit, device, and medium |
-
2018
- 2018-09-20 KR KR1020180113084A patent/KR20200033601A/ko not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111462225A (zh) * | 2020-03-31 | 2020-07-28 | 电子科技大学 | 一种红外光斑图像的质心识别定位方法 |
| US11232315B2 (en) | 2020-04-28 | 2022-01-25 | NextVPU (Shanghai) Co., Ltd. | Image depth determining method and living body identification method, circuit, device, and medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6394005B2 (ja) | 投影画像補正装置、投影する原画像を補正する方法およびプログラム | |
| US9774837B2 (en) | System for performing distortion correction and calibration using pattern projection, and method using the same | |
| US11455746B2 (en) | System and methods for extrinsic calibration of cameras and diffractive optical elements | |
| JP6663040B2 (ja) | 奥行き情報取得方法および装置、ならびに画像取得デバイス | |
| US9858684B2 (en) | Image processing method and apparatus for calibrating depth of depth sensor | |
| CN107808398B (zh) | 摄像头参数算出装置以及算出方法、程序、记录介质 | |
| EP3189493B1 (en) | Depth map based perspective correction in digital photos | |
| CN110225321B (zh) | 梯形校正的训练样本数据获取系统和方法 | |
| WO2013005265A1 (ja) | 三次元座標計測装置及び三次元座標計測方法 | |
| JP7298687B2 (ja) | 物体認識装置及び物体認識方法 | |
| US20170256046A1 (en) | Information processing apparatus, method of controlling information processing apparatus, and storage medium | |
| JP6897082B2 (ja) | 顔向き推定用コンピュータプログラム、顔向き推定装置及び顔向き推定方法 | |
| KR20200033601A (ko) | 영상 처리 장치 및 방법 | |
| KR102016988B1 (ko) | 3차원 정보 생성을 위한 카메라 자세 벡터 보정 방법 | |
| JP6065670B2 (ja) | 3次元計測システム、プログラム及び方法。 | |
| KR102132527B1 (ko) | Avm 시스템 및 avm 시스템에서, 영상 사이의 매칭점 검출 방법 | |
| WO2023062994A1 (ja) | 学習装置、学習方法、学習プログラム、カメラパラメータ算出装置、カメラパラメータ算出方法及びカメラパラメータ算出プログラム | |
| KR101982755B1 (ko) | 항공 영상을 정합하는 방법 및 장치 | |
| US20230410368A1 (en) | Method for learning network parameter of neural network, method for calculating camera parameter, and computer-readable recording medium recording a program | |
| CN111353945B (zh) | 鱼眼图像校正方法、装置及存储介质 | |
| JP3452188B2 (ja) | 2次元動画像中の特徴点の追跡方法 | |
| CN115222590A (zh) | 全景图像的生成方法、装置、终端及存储介质 | |
| CN118918253A (zh) | 一种基于全景立体视觉相机的同步定位与建图方法 | |
| WO2025017984A1 (ja) | 撮影装置、補正装置、補正方法及びコンピュータプログラム | |
| JP2018081534A (ja) | 画像処理装置、撮像装置および制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180920 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |