KR20200034037A - 차량의 주행 제어 장치 및 방법 - Google Patents
차량의 주행 제어 장치 및 방법 Download PDFInfo
- Publication number
- KR20200034037A KR20200034037A KR1020180110478A KR20180110478A KR20200034037A KR 20200034037 A KR20200034037 A KR 20200034037A KR 1020180110478 A KR1020180110478 A KR 1020180110478A KR 20180110478 A KR20180110478 A KR 20180110478A KR 20200034037 A KR20200034037 A KR 20200034037A
- Authority
- KR
- South Korea
- Prior art keywords
- driving
- vehicle
- control
- scenario
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2754/00—Output or target parameters relating to objects
- B60W2754/10—Spatial relation or speed relative to objects
- B60W2754/30—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2754/00—Output or target parameters relating to objects
- B60W2754/10—Spatial relation or speed relative to objects
- B60W2754/50—Relative longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
도 2 내지 도 6은 본 발명의 일 실시예에 따른 차량의 주행 제어 장치의 동작을 설명하는데 참조되는 실시예를 도시한 도면이다.
도 7은 본 발명의 일 실시예에 따른 차량의 주행 제어 장치가 적용된 차량 시스템을 도시한 도면이다.
도 8 및 도 9는 본 발명의 일 실시예에 따른 방법에 대한 동작 흐름을 도시한 도면이다.
도 10은 본 발명의 일 실시예에 따른 방법이 실행되는 컴퓨팅 시스템을 도시한 도면이다.


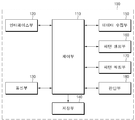
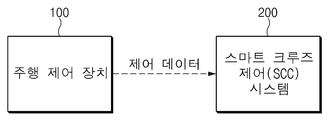
100: 주행 제어 장치 110: 제어부
120: 인터페이스부 130: 통신부
140: 저장부 150: 데이터 수집부
160: 패턴 생성부 170: 패턴 매칭부
180: 판단부 200: 스마트 크루즈 제어(SCC) 시스템
Claims (20)
- 주행 조건에 따라 정의된 주행 시나리오별로 데이터를 수집하는 데이터 수집부;
상기 주행 시나리오별로 수집된 데이터를 분석하여 각 주행 시나리오에 대응되는 패턴을 생성하는 패턴 생성부;
차량의 현재 주행 상황을 판단하고 상기 현재 주행 상황에 대응되는 제어 시나리오를 결정하는 판단부; 및
상기 제어 시나리오에 매칭된 적어도 하나 이상의 주행 시나리오에 대응되는 패턴을 기반으로 제어 데이터를 생성하여 상기 차량의 주행을 제어하는 제어부;
를 포함하는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 주행 시나리오는,
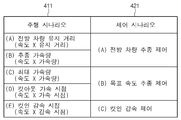
전방 차량 유지거리, 추종 가속량, 최대 가속량, 컷아웃 가속 시점 및 컷인 감속 시점 중 적어도 하나 이상의 주행 조건에 대응하여 정의된 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 패턴 생성부는,
상기 주행 시나리오별로 수집된 데이터로부터 상기 차량의 속도 변화에 따른 전방 차량 유지거리, 가속량, 가속 시간 또는 감속 시간의 변화 패턴을 생성하는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 주행 시나리오별로 생성된 패턴을 주행 조건에 따라 미리 생성된 기준 패턴에 각각 매칭하는 패턴 매칭부를 더 포함하는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 4에 있어서,
상기 패턴 매칭부는,
상기 주행 시나리오별로 생성된 각 패턴과 복수의 상기 기준 패턴의 유사도를 각각 비교하여 유사도가 가장 높은 기준 패턴에 상기 각 패턴을 매칭 시키는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 데이터 수집부는,
상기 데이터 수집 시의 주행 조건에 부합하는 주행 시나리오를 판단하고 상기 수집된 데이터를 해당 주행 시나리오에 대응하여 저장하는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 데이터 수집부는,
미리 설정된 데이터 수집 조건을 만족할 때까지 미리 정해진 주기 마다 데이터를 수집하는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 판단부는,
전방 차량과 자차량 간 목표거리, 전방 차량의 유/무, 전방 차량의 유지거리, 자차량의 목표 속도, 자차량의 현재 속도 및 전방 차량의 상대 속도 중 적어도 하나에 기초하여 제어 시나리오를 결정하는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 판단부는,
상기 차량의 현재 주행 상황에 따라 전방 차량 추종 제어, 목표 속도 추종 제어 및 컷인 감속 제어 중 어느 하나의 제어 상황에 대한 제어 시나리오를 결정하는 것을 특징으로 하는 차량의 주행 제어 장치. - 청구항 1에 있어서,
상기 제어부는,
상기 제어 시나리오에 매칭된 적어도 하나 이상의 주행 시나리오에 대응되는 패턴을 기반으로 요구 가속도, 가속 지연 시점 및 감속 지연 시점 중 적어도 하나의 제어 파라미터에 기초하여 상기 제어 데이터를 생성하는 것을 특징으로 하는 차량의 주행 제어 장치. - 주행 조건에 따라 정의된 주행 시나리오별로 데이터를 수집하는 단계;
상기 주행 시나리오별로 수집된 데이터를 분석하여 각 주행 시나리오에 대응되는 패턴을 생성하는 단계;
차량의 현재 주행 상황을 판단하고 상기 현재 주행 상황에 대응되는 제어 시나리오를 결정하는 단계; 및
상기 제어 시나리오에 매칭된 적어도 하나 이상의 주행 시나리오에 대응되는 패턴을 기반으로 제어 데이터를 생성하여 상기 차량의 주행을 제어하는 단계;
를 포함하는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 주행 시나리오는,
전방 차량 유지거리, 추종 가속량, 최대 가속량, 컷아웃 가속 시점 및 컷인 감속 시점 중 적어도 하나 이상의 주행 조건에 대응하여 정의된 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 패턴을 생성하는 단계는,
상기 주행 시나리오별로 수집된 데이터로부터 상기 차량의 속도 변화에 따른 전방 차량 유지거리, 가속량, 가속 시간 또는 감속 시간의 변화 패턴을 생성하는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 주행 시나리오별로 생성된 패턴을 주행 조건에 따라 미리 생성된 기준 패턴에 각각 매칭하는 단계를 더 포함하는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 14에 있어서,
상기 매칭하는 단계는,
상기 주행 시나리오별로 생성된 각 패턴과 복수의 상기 기준 패턴의 유사도를 각각 비교하여 유사도가 가장 높은 기준 패턴에 상기 각 패턴을 매칭 시키는 단계를 포함하는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 데이터를 수집하는 단계는,
상기 데이터 수집 시의 주행 조건에 부합하는 주행 시나리오를 판단하는 단계; 및
상기 수집된 데이터를 해당 주행 시나리오에 대응하여 저장하는 단계를 포함하는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 데이터를 수집하는 단계는,
미리 설정된 데이터 수집 조건을 만족할 때까지 미리 정해진 주기 마다 수행되는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 제어 시나리오를 결정하는 단계는,
전방 차량과 자차량 간 목표거리, 전방 차량의 유/무, 전방 차량의 유지거리, 자차량의 목표 속도, 자차량의 현재 속도 및 전방 차량의 상대 속도 중 적어도 하나에 기초하여 제어 시나리오를 결정하는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 제어 시나리오를 결정하는 단계는,
상기 차량의 현재 주행 상황에 따라 전방 차량 추종 제어, 목표 속도 추종 제어 및 컷인 감속 제어 중 어느 하나의 제어 상황에 대한 제어 시나리오를 결정하는 것을 특징으로 하는 차량의 주행 제어 방법. - 청구항 11에 있어서,
상기 차량의 주행을 제어하는 단계는,
상기 제어 시나리오에 매칭된 적어도 하나 이상의 주행 시나리오에 대응되는 패턴을 기반으로 요구 가속도, 가속 지연 시점 및 감속 지연 시점 중 적어도 하나의 제어 파라미터를 결정하는 단계; 및
상기 제어 파라미터에 기초하여 상기 제어 데이터를 생성하는 단계를 포함하는 것을 특징으로 하는 차량의 주행 제어 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180110478A KR20200034037A (ko) | 2018-09-14 | 2018-09-14 | 차량의 주행 제어 장치 및 방법 |
| US16/202,715 US20200086868A1 (en) | 2018-09-14 | 2018-11-28 | Apparatus and method for controlling driving of a vehicle |
| CN201811480086.7A CN110901637A (zh) | 2018-09-14 | 2018-12-05 | 车辆的驾驶控制装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180110478A KR20200034037A (ko) | 2018-09-14 | 2018-09-14 | 차량의 주행 제어 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200034037A true KR20200034037A (ko) | 2020-03-31 |
Family
ID=69774713
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180110478A Ceased KR20200034037A (ko) | 2018-09-14 | 2018-09-14 | 차량의 주행 제어 장치 및 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200086868A1 (ko) |
| KR (1) | KR20200034037A (ko) |
| CN (1) | CN110901637A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026054261A1 (ko) * | 2024-09-06 | 2026-03-12 | 주식회사 엘지에너지솔루션 | 전자 장치, 기록매체 및 그의 차량 주행 패턴 분석 방법 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7412254B2 (ja) * | 2020-04-02 | 2024-01-12 | 三菱電機株式会社 | 物体認識装置および物体認識方法 |
| KR20220062940A (ko) * | 2020-11-09 | 2022-05-17 | 현대자동차주식회사 | 차량의 주행 제어 장치 및 방법 |
| CN112721909B (zh) * | 2021-01-27 | 2022-04-08 | 浙江吉利控股集团有限公司 | 一种车辆的控制方法、控制系统及车辆 |
| JP7321220B2 (ja) * | 2021-08-30 | 2023-08-04 | 三菱電機株式会社 | 車両走行支援装置、車両走行支援方法及び車両制御装置 |
| CN115272994B (zh) * | 2021-09-29 | 2023-07-25 | 上海仙途智能科技有限公司 | 自动驾驶预测模型训练方法、装置、终端及介质 |
| KR20230072818A (ko) * | 2021-11-18 | 2023-05-25 | 현대자동차주식회사 | 배터리 컨디셔닝 시스템 및 방법 |
| DE102022207103A1 (de) * | 2022-07-12 | 2024-01-18 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Steuern eines Fahrzeugs |
| CN118082866A (zh) * | 2024-02-28 | 2024-05-28 | 重庆赛力斯凤凰智创科技有限公司 | 一种车辆控制方法、装置、电子设备及存储介质 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101500259B1 (ko) | 2014-02-11 | 2015-03-06 | 현대자동차주식회사 | 자동 차속 제어 장치 및 이를 이용한 방법 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3229297B2 (ja) * | 1998-10-12 | 2001-11-19 | 株式会社データ・テック | 移動体の操作傾向解析方法、運行管理システム及びその構成装置、記録媒体 |
| JP4013499B2 (ja) * | 2001-07-27 | 2007-11-28 | 株式会社日立製作所 | 車両走行制御方法、その装置及び車両 |
| US8265850B2 (en) * | 2009-02-02 | 2012-09-11 | GM Global Technology Operations LLC | Method and apparatus for target vehicle following control for adaptive cruise control |
| US20130297196A1 (en) * | 2010-12-22 | 2013-11-07 | Toyota Jidosha Kabushiki Kaisha | Vehicular driving assist apparatus, method, and vehicle |
| JP2013248925A (ja) * | 2012-05-30 | 2013-12-12 | Hitachi Automotive Systems Ltd | 車両制御装置 |
| US9266536B2 (en) * | 2014-01-17 | 2016-02-23 | Fca Us Llc | Adaptive cruise control system and method |
| US9669833B2 (en) * | 2015-07-21 | 2017-06-06 | GM Global Technology Operations LLC | Method and system for operating adaptive cruise control system |
| DE102015112637A1 (de) * | 2015-07-31 | 2017-02-02 | Volkswagen Aktiengesellschaft | Vorrichtung, Fahrzeug, Verfahren und Computerprogramm zur Berechnung zumindest eines Video- oder Steuersignals basierend auf Information entsprechend einem potentiellen Interesse |
| US10343685B2 (en) * | 2016-09-28 | 2019-07-09 | Baidu Usa Llc | Physical model and machine learning combined method to simulate autonomous vehicle movement |
| US10435015B2 (en) * | 2016-09-28 | 2019-10-08 | Baidu Usa Llc | System delay corrected control method for autonomous vehicles |
| US10649458B2 (en) * | 2017-09-07 | 2020-05-12 | Tusimple, Inc. | Data-driven prediction-based system and method for trajectory planning of autonomous vehicles |
-
2018
- 2018-09-14 KR KR1020180110478A patent/KR20200034037A/ko not_active Ceased
- 2018-11-28 US US16/202,715 patent/US20200086868A1/en not_active Abandoned
- 2018-12-05 CN CN201811480086.7A patent/CN110901637A/zh active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101500259B1 (ko) | 2014-02-11 | 2015-03-06 | 현대자동차주식회사 | 자동 차속 제어 장치 및 이를 이용한 방법 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2026054261A1 (ko) * | 2024-09-06 | 2026-03-12 | 주식회사 엘지에너지솔루션 | 전자 장치, 기록매체 및 그의 차량 주행 패턴 분석 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200086868A1 (en) | 2020-03-19 |
| CN110901637A (zh) | 2020-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200034037A (ko) | 차량의 주행 제어 장치 및 방법 | |
| US10535269B2 (en) | Apparatus and method for collision control of vehicle based on boundary | |
| CN110371119B (zh) | 用于车道变换控制的装置和方法 | |
| CN105667508B (zh) | 车辆速度调节 | |
| KR102540928B1 (ko) | 차로 변경 제어 장치 및 방법 | |
| KR102882413B1 (ko) | 군집 주행 제어 장치 및 그 방법 | |
| KR102299496B1 (ko) | 차량의 자율 주행 제어 장치 및 방법, 그리고 차량 시스템 | |
| US10752261B2 (en) | Driver distraction warning control apparatus and method | |
| US20180120851A1 (en) | Apparatus and method for scanning parking slot | |
| KR102429505B1 (ko) | 차량의 회생 제동 제어 장치 및 방법 | |
| US10260895B2 (en) | Apparatus and method for controlling path of vehicle | |
| US11472408B2 (en) | Device and method for controlling travel of vehicle | |
| US20170021836A1 (en) | Device and method for determining drowsiness and non-transitory storage medium | |
| CN108216098A (zh) | 车辆预警阈值更新方法、系统及其电子设备 | |
| US10279814B2 (en) | Apparatus and method for determining driving state | |
| KR20210069782A (ko) | 군집 주행 제어 장치 및 그 방법 | |
| KR20200009553A (ko) | 저크 기반 부주의 운전 상태 판단 장치 및 방법, 그리고 차량 시스템 | |
| US20210155235A1 (en) | Apparatus for controlling required speed of vehicle, system having the same and method thereof | |
| US20240425086A1 (en) | Apparatus for controlling automatic driving of vehicle and method for determining state of a driver | |
| KR102762189B1 (ko) | 차량 자율 주행 제어 장치, 그를 포함한 시스템 및 그 방법 | |
| KR20200061083A (ko) | 차량의 변속 제어 장치 및 방법 | |
| US20180218047A1 (en) | In-vehicle information terminal and non-transitory computer-readable storage medium storing information search program | |
| KR20220128557A (ko) | 군집 주행 제어 장치, 그를 포함한 차량 시스템 및 그 방법 | |
| US20250002086A1 (en) | Apparatus and method for generating path of a vehicle | |
| KR20200113038A (ko) | 차량 제어 장치, 그를 포함한 시스템 및 그 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180914 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210608 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20180914 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20220613 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20221212 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20220613 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| X091 | Application refused [patent] | ||
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20221212 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20220812 Comment text: Amendment to Specification, etc. |
|
| E601 | Decision to refuse application | ||
| E801 | Decision on dismissal of amendment | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230321 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20220613 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| PE0801 | Dismissal of amendment |
Patent event code: PE08012E01D Comment text: Decision on Dismissal of Amendment Patent event date: 20230321 Patent event code: PE08011R01I Comment text: Amendment to Specification, etc. Patent event date: 20230313 Patent event code: PE08011R01I Comment text: Amendment to Specification, etc. Patent event date: 20220812 |