KR20200034529A - 전자 장치 및 전자 장치의 차량 제어 방법, 서버 및 서버의 정밀 지도 데이터 제공 방법 - Google Patents
전자 장치 및 전자 장치의 차량 제어 방법, 서버 및 서버의 정밀 지도 데이터 제공 방법 Download PDFInfo
- Publication number
- KR20200034529A KR20200034529A KR1020180114434A KR20180114434A KR20200034529A KR 20200034529 A KR20200034529 A KR 20200034529A KR 1020180114434 A KR1020180114434 A KR 1020180114434A KR 20180114434 A KR20180114434 A KR 20180114434A KR 20200034529 A KR20200034529 A KR 20200034529A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- map
- information
- map data
- precision
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3885—Transmission of map data to client devices; Reception of map data by client devices
- G01C21/3896—Transmission of map data from central databases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3605—Destination input or retrieval
- G01C21/362—Destination input or retrieval received from an external device or application, e.g. PDA, mobile phone or calendar application
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3863—Structures of map data
- G01C21/387—Organisation of map data, e.g. version management or database structures
- G01C21/3878—Hierarchical structures, e.g. layering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3885—Transmission of map data to client devices; Reception of map data by client devices
- G01C21/3889—Transmission of selected map data, e.g. depending on route
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/028—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal
- G05D1/0282—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using a RF signal generated in a local control room
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/246—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096805—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route
- G08G1/096827—Systems involving transmission of navigation instructions to the vehicle where the transmitted instructions are used to compute a route where the route is computed onboard
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/096833—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route
- G08G1/09685—Systems involving transmission of navigation instructions to the vehicle where different aspects are considered when computing the route where the complete route is computed only once and not updated
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Databases & Information Systems (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Human Computer Interaction (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
도 2는, 일 실시예에 따른 정밀 지도 데이터를 제공하는 서버의 상세 블록도들을 나타낸다.
도 3은, 일 실시예에 따른, 복수 개의 지도 레이어들 중 적어도 하나의 지도 레이어를 선택하는 과정을 설명하는 도면이다.
도 4는, 일 실시 예에 따른, 정밀 지도를 업데이트하는 과정을 설명하기 위한 도면이다.
도 5는, 일 실시 예에 따른, 정밀 지도를 검증하는 과정을 설명하기 위한 도면이다.
도 6 및 도 7은, 일 실시 예에 따른, 차량이 주행하는 상황에서 정밀 지도 데이터를 제공하는 과정을 설명하기 위한 도면이다.
도 8은, 일 실시예에 따른, 전자 장치의 구성을 설명하기 위한 블록도이다.
도 9는, 일 실시예에 따른, 전자 장치가 차량을 제어하는 방법을 나타내는 흐름도이다.
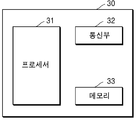
도 10은, 일 실시예에 따른, 서버의 구성을 설명하기 위한 블록도이다.
도 11은, 일 실시예에 따른, 서버가 정밀 지도 데이터를 제공하는 방법을 나타내는 흐름도이다.
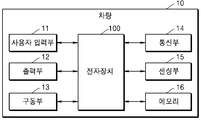
도 12는, 일 실시예에 따른, 차량의 구성을 설명하기 위한 블록 구성도이다.
12: 출력부 13: 구동부
14: 통신부 15: 센싱부
16: 메모리 20: 타 차량
30: 서버
Claims (20)
- 전자 장치가 차량을 제어하는 방법에 있어서,
상기 차량의 프로파일 정보로서, 상기 차량에 마련된 적어도 하나의 센서에 대한 센서 정보, 상기 차량의 통신 효율 정보 및 상기 차량의 주행 정보를 상기 차량과 통신 연결된 외부 서버에게 전송하는 동작;
상기 외부 서버로부터, 정밀 지도를 구성하도록 조합된, 속성에 따라 구별되는 복수 개의 지도 레이어들 중에서, 상기 차량의 프로파일 정보에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하는 동작; 및
상기 수신된 적어도 하나의 정밀 지도 데이터를 이용하여, 상기 차량이 자율 주행을 수행하도록 제어하는 동작을 포함하는,
차량 제어 방법. - 제1항에 있어서,
상기 차량의 프로파일 정보는,
상기 차량의 주행에 요구되는 자율 주행 수준을 더 포함하고,
상기 정밀 지도 데이터를 수신하는 동작은,
상기 복수 개의 지도 레이어들 중에서, 상기 자율 주행 수준에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하는 동작을 포함하는,
차량 제어 방법. - 제1항에 있어서,
상기 차량의 프로파일 정보는,
상기 차량의 주변 환경 정보를 더 포함하고,
상기 정밀 지도 데이터를 수신하는 동작은,
상기 복수 개의 지도 레이어들 중에서, 상기 차량의 주변 환경 정보에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하는 동작을 포함하는,
차량 제어 방법. - 제1항에 있어서,
상기 정밀 지도 데이터를 수신하는 동작은,
상기 외부 서버로부터, 네비게이션 지도를 구성하도록 조합된, 속성에 따라 구별되는 복수 개의 지도 레이어들 중에서, 상기 차량의 프로파일 정보에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 네비게이션 정밀 지도 데이터를 수신하는 동작을 더 포함하는,
차량 제어 방법. - 제1항에 있어서,
상기 차량이 제1 지역에서 제2 지역으로 주행하는 경우,
상기 방법은,
상기 프로파일 정보와 다른 상기 제2 지역에 대응되는 프로파일 정보를 상기 외부 서버에게 전송하는 동작; 및
상기 복수 개의 지도 레이어들 중에서, 상기 제2 지역에 대응되는 프로파일 정보에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하는 동작을 더 포함하는,
차량 제어 방법. - 제1항에 있어서,
상기 차량의 통신 효율 정보는,
상기 외부 서버 간의 통신 전송 속도 및 상기 외부 서버 간 통신을 위하여 할당된 통신 대역폭 중 적어도 하나를 포함하는,
차량 제어 방법. - 제1항에 있어서,
상기 센서 정보는,
센서의 종류, 센서의 개수, 센서의 장착 위치 및 센서의 사양 중 적어도 하나를 포함하는,
차량 제어 방법. - 제1항에 있어서,
상기 차량의 주행 정보는,
상기 차량의 주행 위치 정보, 상기 차량의 주행 지역 정보, 상기 차량의 주행 경로 정보 및 상기 차량의 주행 계획 정보 중 적어도 하나를 포함하는,
차량 제어 방법. - 서버의 정밀 지도 데이터 제공 방법에 있어서,
속성에 따라 구별된 복수 개의 지도 레이어들이 조합된 정밀 지도를 저장하는 동작;
서버와 통신하는 차량으로부터, 상기 차량의 프로파일 정보로서, 상기 차량에 마련된 적어도 하나의 센서에 대한 센서 정보, 상기 차량의 통신 효율 정보 및 상기 차량의 위치 정보를 수신하는 동작;
상기 수신된 차량의 프로파일 정보에 기반하여, 상기 정밀 지도를 구성하도록 조합된 상기 복수 개의 레이어들 중에서 적어도 하나의 지도 레이어를 선택하는 동작; 및
상기 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 상기 차량에게 전송하는 동작을 포함하는,
지도 제공 방법. - 제9항에 있어서,
상기 방법은,
상기 복수 개의 차량들 각각으로부터 정밀 지도 데이터들을 수집하는 동작;
상기 수집된 정밀 지도 데이터들로부터, 복수 개의 지도 레이어들 각각의 속성과 관련된 특징 데이터들을 추출하는 동작; 및
상기 추출된 특징 데이터를 이용하여 생성된 복수 개의 지도 레이어들을 조합하여 상기 정밀 지도를 생성하는 동작을 더 포함하는,
지도 제공 방법. - 제9항에 있어서,
상기 방법은,
상기 복수 개의 지도 레이어들 중 일 지도 레이어에 포함된 특징 데이터를 이용하여 다른 지도 레이어를 업데이트하는 동작을 더 포함하고,
상기 정밀 지도 데이터를 상기 차량에게 전송하는 동작은,
상기 업데이트된 지도 레이어와 관련된 정밀 지도 데이터를 상기 차량에게 전송하는 동작을 포함하는,
지도 제공 방법. - 제9항에 있어서,
상기 방법은,
상기 복수 개의 지도 레이어들 중 두 개 이상의 지도 레이어에 포함된 특징 데이터를 서로 비교하여 검증하는 동작을 더 포함하고,
상기 정밀 지도 데이터를 상기 차량에게 전송하는 동작은,
상기 검증된 지도 레이어와 관련된 정밀 지도 데이터를 상기 차량에게 전송하는 동작을 포함하는,
지도 제공 방법. - 제9항에 있어서,
상기 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 상기 차량에게 전송하는 동작은,
상기 선택된 적어도 하나의 지도 레이어로부터 특징 데이터를 추출하는 동작;
상기 추출된 특징 데이터를 이용하여 상기 적어도 하나의 지도 레이어 관련된 정밀 지도 데이터를 생성하는 동작; 및
상기 생성된 정밀 지도 데이터를 상기 차량에게 전송하는 동작을 포함하는,
지도 제공 방법. - 차량을 제어하는 전자 장치에 있어서,
외부 서버와 통신하는 통신부;
적어도 하나의 인스트럭션을 실행하는 적어도 하나의 프로세서; 및
상기 적어도 하나의 인스트럭션을 저장하는 적어도 하나의 메모리를 포함하고,
상기 적어도 하나의 프로세서는 상기 적어도 하나의 인스트럭션을 실행하여,
상기 차량의 프로파일 정보로서, 상기 차량에 마련된 적어도 하나의 센서에 대한 센서 정보, 상기 차량의 통신 효율 정보 및 상기 차량의 주행 정보를 상기 차량과 통신 연결된 외부 서버에게 전송하도록 상기 통신부를 제어하고,
상기 외부 서버로부터, 정밀 지도를 구성하도록 조합된, 속성에 따라 구별되는 복수 개의 지도 레이어들 중에서, 상기 차량의 프로파일 정보에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하도록 상기 통신부를 제어하고,
상기 수신된 적어도 하나의 정밀 지도 데이터를 이용하여, 상기 차량이 자율 주행을 수행하도록 제어하는
전자 장치. - 제14항에 있어서,
상기 차량의 프로파일 정보는,
상기 차량의 주행에 요구되는 자율 주행 수준을 더 포함하고,
상기 적어도 하나의 프로세서는,
상기 복수 개의 지도 레이어들 중에서, 상기 자율 주행 수준에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하도록 상기 통신부를 제어하는,
전자 장치. - 제14항에 있어서,
상기 차량의 프로파일 정보는,
상기 차량의 주변 환경 정보를 더 포함하고,
상기 적어도 하나의 프로세서는,
상기 복수 개의 지도 레이어들 중에서, 상기 차량의 주변 환경 정보에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하도록 상기 통신부를 제어하는,
전자 장치. - 제14항에 있어서,
상기 차량이 제1 지역에서 제2 지역으로 주행하는 경우,
상기 적어도 하나의 프로세서는,
상기 프로파일 정보와 다른 상기 제2 지역에 대응되는 프로파일 정보를 상기 외부 서버에게 전송하도록 상기 통신부를 제어하고,
상기 복수 개의 지도 레이어들 중에서, 상기 제2 지역에 대응되는 프로파일 정보에 기반하여 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 수신하도록 상기 통신부를 제어하는,
전자 장치. - 정밀 지도 데이터 제공하는 서버에 있어서,
차량과 통신하는 통신부;
적어도 하나의 인스트럭션을 실행하는 적어도 하나의 프로세서; 및
상기 적어도 하나의 인스트럭션 및 속성에 따라 구별된 복수 개의 지도 레이어들을 저장하는 메모리를 포함하고,
상기 적어도 하나의 프로세서는 상기 적어도 하나의 인스트럭션을 실행하여,
상기 차량으로부터, 상기 차량의 프로파일 정보로서, 상기 차량에 마련된 적어도 하나의 센서에 대한 센서 정보, 상기 차량의 통신 효율 정보 및 상기 차량의 위치 정보를 수신하도록 상기 통신부를 제어하고,
상기 수신된 차량의 프로파일 정보에 기반하여, 상기 정밀 지도를 구성하도록 조합된 상기 복수 개의 레이어들 중에서 적어도 하나의 지도 레이어를 선택하고,
상기 선택된 적어도 하나의 지도 레이어와 관련된 정밀 지도 데이터를 상기 차량에게 전송하도록 상기 통신부를 제어하는,
서버. - 제18항에 있어서,
상기 적어도 하나의 프로세서는,
상기 복수 개의 지도 레이어들 중 일 지도 레이어에 포함된 특징 데이터를 이용하여 다른 지도 레이어를 업데이트하고,
상기 업데이트된 지도 레이어와 관련된 정밀 지도 데이터를 상기 차량에게 전송하도록 상기 통신부를 제어하는,
서버. - 제18항에 있어서,
상기 적어도 하나의 프로세서는,
상기 복수 개의 지도 레이어들 중 두 개 이상의 지도 레이어에 포함된 특징 데이터를 서로 비교하여 검증하고,
상기 검증된 지도 레이어와 관련된 정밀 지도 데이터를 상기 차량에게 전송하도록 상기 통신부를 제어하는,
서버.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180114434A KR102480417B1 (ko) | 2018-09-21 | 2018-09-21 | 전자 장치 및 전자 장치의 차량 제어 방법, 서버 및 서버의 정밀 지도 데이터 제공 방법 |
| EP19863849.6A EP3832422B1 (en) | 2018-09-21 | 2019-09-20 | Electronic device and vehicle control method of electronic device, server and method for providing precise map data of server |
| PCT/KR2019/012268 WO2020060308A1 (ko) | 2018-09-21 | 2019-09-20 | 전자 장치 및 전자 장치의 차량 제어 방법, 서버 및 서버의 정밀 지도 데이터 제공 방법 |
| US17/270,663 US12045064B2 (en) | 2018-09-21 | 2019-09-20 | Electronic device and vehicle control method of electronic device, server and method for providing precise map data of server |
| CN201980060668.6A CN112740134B (zh) | 2018-09-21 | 2019-09-20 | 电子装置和电子装置的车辆控制方法、服务器和提供服务器的精确地图数据的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180114434A KR102480417B1 (ko) | 2018-09-21 | 2018-09-21 | 전자 장치 및 전자 장치의 차량 제어 방법, 서버 및 서버의 정밀 지도 데이터 제공 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200034529A true KR20200034529A (ko) | 2020-03-31 |
| KR102480417B1 KR102480417B1 (ko) | 2022-12-22 |
Family
ID=69887574
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180114434A Active KR102480417B1 (ko) | 2018-09-21 | 2018-09-21 | 전자 장치 및 전자 장치의 차량 제어 방법, 서버 및 서버의 정밀 지도 데이터 제공 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12045064B2 (ko) |
| EP (1) | EP3832422B1 (ko) |
| KR (1) | KR102480417B1 (ko) |
| CN (1) | CN112740134B (ko) |
| WO (1) | WO2020060308A1 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210064121A (ko) * | 2020-05-14 | 2021-06-02 | 베이징 바이두 넷컴 사이언스 앤 테크놀로지 코., 엘티디. | 전자 지도 디스플레이 방법, 장치, 기기 및 매체 |
| KR102302977B1 (ko) * | 2020-10-21 | 2021-09-16 | 서경덕 | 복수의 무인 이동체 통합 제어 시스템 |
| WO2021246534A1 (ko) * | 2020-06-01 | 2021-12-09 | 엘지전자 주식회사 | 경로 제공 장치 및 그것의 경로 제공 방법 |
| EP4015997A1 (en) * | 2020-12-18 | 2022-06-22 | INTEL Corporation | Map representation system and computer-readable medium |
| KR102503679B1 (ko) * | 2022-05-27 | 2023-02-24 | 주식회사 라이드플럭스 | 차량의 자율주행 제어를 위한 정밀지도 생성 방법, 장치 및 컴퓨터프로그램 |
| KR20240020676A (ko) * | 2022-08-08 | 2024-02-15 | 주식회사 아이나비시스템즈 | 경로 안내 서비스 장치 |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102014259B1 (ko) * | 2016-11-24 | 2019-08-26 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| KR102307861B1 (ko) * | 2019-05-21 | 2021-10-01 | 엘지전자 주식회사 | 경로 제공 장치 및 그것의 경로 제공 방법 |
| WO2021045255A1 (ko) * | 2019-09-04 | 2021-03-11 | 엘지전자 주식회사 | 경로 제공 장치 및 그것의 경로 제공 방법 |
| WO2021045257A1 (ko) * | 2019-09-04 | 2021-03-11 | 엘지전자 주식회사 | 경로 제공 장치 및 그것의 경로 제공 방법 |
| CN112556700A (zh) * | 2019-09-25 | 2021-03-26 | 华为技术有限公司 | 地图级别指示方法、地图级别获取方法及相关产品 |
| EP4107485A1 (en) * | 2020-02-20 | 2022-12-28 | TomTom Global Content B.V. | Using map change data |
| JP7272302B2 (ja) * | 2020-03-09 | 2023-05-12 | トヨタ自動車株式会社 | 地図データ記憶装置及び地図データ更新用コンピュータプログラム |
| US11880209B2 (en) | 2020-05-15 | 2024-01-23 | Samsung Electronics Co., Ltd. | Electronic apparatus and controlling method thereof |
| US11713979B2 (en) * | 2020-08-27 | 2023-08-01 | Here Global B.V. | Method, apparatus, and computer program product for generating a transition variability index related to autonomous driving |
| US11691643B2 (en) | 2020-08-27 | 2023-07-04 | Here Global B.V. | Method and apparatus to improve interaction models and user experience for autonomous driving in transition regions |
| US11687094B2 (en) | 2020-08-27 | 2023-06-27 | Here Global B.V. | Method, apparatus, and computer program product for organizing autonomous vehicles in an autonomous transition region |
| WO2022054712A1 (ja) * | 2020-09-09 | 2022-03-17 | 株式会社デンソー | 地図サーバ、地図配信方法、地図データ構造、車両用装置 |
| JP7468278B2 (ja) * | 2020-09-29 | 2024-04-16 | 株式会社デンソー | 通信制御装置、通信制御方法、および通信制御プログラム |
| US12291236B1 (en) * | 2020-11-06 | 2025-05-06 | Waymo Llc | Using the presence of road surface and surrounding area illumination to detect occluded objects |
| US11468632B2 (en) * | 2020-12-08 | 2022-10-11 | Agerpoint, Inc. | Agricultural modeling system with data fusion and related server computing resource and methods |
| CN113034685B (zh) * | 2021-03-18 | 2022-12-06 | 北京百度网讯科技有限公司 | 激光点云与高精地图的叠加方法、装置及电子设备 |
| US20220349725A1 (en) * | 2021-04-21 | 2022-11-03 | Nvidia Corporation | High definition mapping for autonomous systems and applications |
| CN113619607B (zh) * | 2021-09-17 | 2023-04-18 | 合众新能源汽车股份有限公司 | 汽车行驶的控制方法和控制系统 |
| US20240377223A1 (en) * | 2021-11-04 | 2024-11-14 | Subaru Corporation | Vehicle travel control assistance system having map update function, map update server apparatus, and assistance server apparatus |
| KR20230109942A (ko) * | 2022-01-14 | 2023-07-21 | 현대자동차주식회사 | 자율 주행을 위한 정밀지도 업데이트 시스템 및 이를 이용한 정밀지도 업데이트 방법 |
| US12332079B2 (en) * | 2022-02-11 | 2025-06-17 | Nvidia Corporation | High definition (HD) map content representation and distribution for autonomous vehicles |
| US20230303111A1 (en) * | 2022-03-22 | 2023-09-28 | Here Global B.V. | Autonomous vehicle navigation using non-connected map fragments |
| US12276735B2 (en) * | 2022-08-04 | 2025-04-15 | Qualcomm Incorporated | Enhanced navigation mode with location detection and map layer switching |
| CN117710590A (zh) * | 2022-09-06 | 2024-03-15 | 北京图森智途科技有限公司 | 点云数据的参数化及地图构建方法 |
| DE102022211487B4 (de) | 2022-10-28 | 2025-02-27 | Continental Autonomous Mobility Germany GmbH | Verfahren zum Erstellen und Bereitstellen einer erweiterten Umgebungskarte |
| DE102023110841B3 (de) * | 2023-04-27 | 2024-05-23 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Kraftfahrzeug |
| US20250123954A1 (en) * | 2023-10-11 | 2025-04-17 | Cerence Operating Company | Tiling Based Approach for Unified Destination Entry |
| KR20250073934A (ko) * | 2023-11-20 | 2025-05-27 | 주식회사 카카오모빌리티 | 다양한 자율 주행 네비게이션 플랫폼을 위한 적응형 지도 제공 방법 및 장치 |
| EP4575397B1 (en) * | 2023-12-20 | 2026-02-04 | TomTom Global Content B.V. | Method of modifying map data, and machine-readable instruction code |
| EP4575398A1 (en) * | 2023-12-20 | 2025-06-25 | TomTom Global Content B.V. | Method of modifying map data, and machine-readable instruction code |
| WO2025184833A1 (en) * | 2024-03-06 | 2025-09-12 | Qualcomm Incorporated | Map information for pose determination |
| EP4696987A1 (en) | 2024-08-14 | 2026-02-18 | TomTom Global Content B.V. | Method of enabling access to electronic map data, electronic map, and machine-readable instruction code |
| EP4696983A1 (en) | 2024-08-14 | 2026-02-18 | TomTom Global Content B.V. | Method of performing a map data-related function, electronic map, and machine-readable instruction code |
| US12584746B2 (en) * | 2024-08-23 | 2026-03-24 | Honeywell International Inc. | Method and system of evaluation of source map sufficiency for vehicle map integration |
| US20260082188A1 (en) * | 2024-09-19 | 2026-03-19 | Qualcomm Incorporated | Dynamically adjustable map data for adas/ad features |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003075177A (ja) * | 2001-09-03 | 2003-03-12 | Pioneer Electronic Corp | 通信型ナビゲーション装置およびサーバ装置 |
| KR20170054186A (ko) * | 2015-11-09 | 2017-05-17 | 현대자동차주식회사 | 자율주행차량 제어 장치 및 그 방법 |
| KR20170082165A (ko) * | 2016-01-05 | 2017-07-14 | 한국전자통신연구원 | 차량 자율주행 서비스 시스템 및 이를 위한 클라우드 서버 및 그 동작 방법 |
| EP3322204A1 (en) * | 2016-11-11 | 2018-05-16 | Bayerische Motoren Werke Aktiengesellschaft | Driver assistance system and method |
| US20180204456A1 (en) * | 2017-01-19 | 2018-07-19 | GM Global Technology Operations LLC | Multi-vehicle sensor sharing |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1288625B1 (en) | 2001-08-31 | 2011-07-27 | Pioneer Corporation | Communication-type navigation apparatus and server device |
| JP4604560B2 (ja) | 2004-06-02 | 2011-01-05 | 富士通株式会社 | 表示方法 |
| US20060058952A1 (en) | 2004-09-07 | 2006-03-16 | Cooper Clive W | System and method of wireless downloads of map and geographic based data to portable computing devices |
| JP4682660B2 (ja) | 2005-03-23 | 2011-05-11 | 株式会社デンソー | 地図データ検査装置及び地図データの検査方法 |
| JP5339731B2 (ja) | 2008-01-22 | 2013-11-13 | 日立オートモティブシステムズ株式会社 | 更新情報提供サーバ、更新情報提供システム、およびナビゲーション装置 |
| JP2009192420A (ja) * | 2008-02-15 | 2009-08-27 | Sharp Corp | 移動体ナビゲーションシステム、ナビゲーション装置およびサーバ装置 |
| KR20110060546A (ko) * | 2009-11-30 | 2011-06-08 | 현대자동차주식회사 | 지도 레이어를 부분적으로 갱신할 수 있는 내비게이션 시스템 및 그 방법 |
| CN102236538A (zh) | 2010-04-29 | 2011-11-09 | 英业达股份有限公司 | 地区性统计数据的电子地图显示系统及其方法 |
| KR101170380B1 (ko) | 2012-03-28 | 2012-08-01 | (주)삼경이엔씨 | 클리핑과 조인을 통한 객체기반 수치지도 수시갱신장치 및 방법 |
| JP6297482B2 (ja) * | 2014-12-26 | 2018-03-20 | 日立オートモティブシステムズ株式会社 | 情報処理装置 |
| US9958278B2 (en) | 2015-01-14 | 2018-05-01 | Telenav, Inc. | Navigation system with scalable display mechanism and method of operation thereof |
| CN111380545B (zh) | 2015-02-10 | 2024-11-12 | 御眼视觉技术有限公司 | 用于自主车辆导航的方法、服务器、自主车辆以及介质 |
| US10002156B2 (en) | 2015-03-16 | 2018-06-19 | Here Global B.V. | Version management for incrementally compiled map data |
| KR102354597B1 (ko) | 2015-04-20 | 2022-01-25 | 삼성전자주식회사 | 차량서비스 제공 방법 및 장치 |
| WO2016198816A1 (en) * | 2015-06-09 | 2016-12-15 | Toshiba Research Europe Limited | Moving mobile wireless vehicle network infrastructure system and method |
| JP2017032422A (ja) | 2015-08-03 | 2017-02-09 | クラリオン株式会社 | 情報配信システム、情報処理装置、車載装置及び経路探索方法 |
| WO2017058961A2 (en) * | 2015-09-28 | 2017-04-06 | Uber Technologies, Inc. | Autonomous vehicle with independent auxiliary control units |
| EP3385670B1 (en) | 2015-11-30 | 2021-03-31 | Huawei Technologies Co., Ltd. | Autopilot navigation method, device, system, on-board terminal and server |
| CN105404689B (zh) | 2015-12-11 | 2019-09-06 | 厦门精图信息技术有限公司 | 一种电子地图子图层的构建、操作方法及装置 |
| US10503168B1 (en) * | 2016-01-22 | 2019-12-10 | State Farm Mutual Automotive Insurance Company | Autonomous vehicle retrieval |
| KR102373926B1 (ko) | 2016-02-05 | 2022-03-14 | 삼성전자주식회사 | 이동체 및 이동체의 위치 인식 방법 |
| US10309794B2 (en) | 2016-03-04 | 2019-06-04 | GM Global Technology Operations LLC | Progressive map maintenance at a mobile navigation unit |
| US10133280B2 (en) | 2016-06-23 | 2018-11-20 | Lg Electronics Inc. | Vehicle control device mounted on vehicle and method for controlling the vehicle |
| KR102275507B1 (ko) | 2016-06-23 | 2021-07-12 | 엘지전자 주식회사 | 차량에 구비된 차량 제어 장치 및 차량의 제어방법 |
| US10502577B2 (en) | 2016-06-30 | 2019-12-10 | Here Global B.V. | Iterative map learning based on vehicle on-board sensor data |
| DE102016212195A1 (de) * | 2016-07-05 | 2018-01-11 | Robert Bosch Gmbh | Verfahren zum Durchführen eines automatischen Eingriffs in die Fahrzeugführung eines Fahrzeugs |
| AU2017300097B2 (en) | 2016-07-21 | 2022-03-10 | Mobileye Vision Technologies Ltd. | Crowdsourcing and distributing a sparse map, and lane measurements for autonomous vehicle navigation |
| US10366508B1 (en) * | 2016-08-29 | 2019-07-30 | Perceptin Shenzhen Limited | Visual-inertial positional awareness for autonomous and non-autonomous device |
| US10474163B2 (en) | 2016-11-24 | 2019-11-12 | Lg Electronics Inc. | Vehicle control device mounted on vehicle and method for controlling the vehicle |
| CN110249204B (zh) | 2016-12-06 | 2021-11-09 | 日产北美公司 | 用于自主车辆的解决方案路径叠加界面 |
| KR102395283B1 (ko) | 2016-12-14 | 2022-05-09 | 현대자동차주식회사 | 자율 주행 제어 장치, 그를 포함한 시스템 및 그 방법 |
| US10126137B2 (en) * | 2017-02-09 | 2018-11-13 | GM Global Technology Operations LLC | Methods and systems to convey autonomous/semi-autonomous feature available roadways |
| JP6721118B2 (ja) * | 2017-04-12 | 2020-07-08 | 日産自動車株式会社 | 運転制御方法及び運転制御装置 |
| US10551838B2 (en) * | 2017-08-08 | 2020-02-04 | Nio Usa, Inc. | Method and system for multiple sensor correlation diagnostic and sensor fusion/DNN monitor for autonomous driving application |
| US10345110B2 (en) * | 2017-08-14 | 2019-07-09 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous vehicle routing based on chaos assessment |
| US10831190B2 (en) * | 2017-08-22 | 2020-11-10 | Huawei Technologies Co., Ltd. | System, method, and processor-readable medium for autonomous vehicle reliability assessment |
| WO2019069868A1 (ja) * | 2017-10-04 | 2019-04-11 | パイオニア株式会社 | 判定装置及び判定方法並びに判定用プログラム |
-
2018
- 2018-09-21 KR KR1020180114434A patent/KR102480417B1/ko active Active
-
2019
- 2019-09-20 CN CN201980060668.6A patent/CN112740134B/zh active Active
- 2019-09-20 US US17/270,663 patent/US12045064B2/en active Active
- 2019-09-20 EP EP19863849.6A patent/EP3832422B1/en active Active
- 2019-09-20 WO PCT/KR2019/012268 patent/WO2020060308A1/ko not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003075177A (ja) * | 2001-09-03 | 2003-03-12 | Pioneer Electronic Corp | 通信型ナビゲーション装置およびサーバ装置 |
| KR20170054186A (ko) * | 2015-11-09 | 2017-05-17 | 현대자동차주식회사 | 자율주행차량 제어 장치 및 그 방법 |
| KR20170082165A (ko) * | 2016-01-05 | 2017-07-14 | 한국전자통신연구원 | 차량 자율주행 서비스 시스템 및 이를 위한 클라우드 서버 및 그 동작 방법 |
| EP3322204A1 (en) * | 2016-11-11 | 2018-05-16 | Bayerische Motoren Werke Aktiengesellschaft | Driver assistance system and method |
| US20180204456A1 (en) * | 2017-01-19 | 2018-07-19 | GM Global Technology Operations LLC | Multi-vehicle sensor sharing |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210064121A (ko) * | 2020-05-14 | 2021-06-02 | 베이징 바이두 넷컴 사이언스 앤 테크놀로지 코., 엘티디. | 전자 지도 디스플레이 방법, 장치, 기기 및 매체 |
| WO2021246534A1 (ko) * | 2020-06-01 | 2021-12-09 | 엘지전자 주식회사 | 경로 제공 장치 및 그것의 경로 제공 방법 |
| KR102302977B1 (ko) * | 2020-10-21 | 2021-09-16 | 서경덕 | 복수의 무인 이동체 통합 제어 시스템 |
| EP4015997A1 (en) * | 2020-12-18 | 2022-06-22 | INTEL Corporation | Map representation system and computer-readable medium |
| US12209882B2 (en) | 2020-12-18 | 2025-01-28 | Intel Corporation | Map representation system and method for operating an autonomous agent |
| KR102503679B1 (ko) * | 2022-05-27 | 2023-02-24 | 주식회사 라이드플럭스 | 차량의 자율주행 제어를 위한 정밀지도 생성 방법, 장치 및 컴퓨터프로그램 |
| KR102606631B1 (ko) * | 2022-05-27 | 2023-11-29 | 주식회사 라이드플럭스 | 차량의 자율주행 제어를 위한 정밀지도 생성 방법, 장치 및 컴퓨터프로그램 |
| KR20240020676A (ko) * | 2022-08-08 | 2024-02-15 | 주식회사 아이나비시스템즈 | 경로 안내 서비스 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12045064B2 (en) | 2024-07-23 |
| CN112740134B (zh) | 2024-08-02 |
| CN112740134A (zh) | 2021-04-30 |
| EP3832422B1 (en) | 2023-02-15 |
| EP3832422A4 (en) | 2021-09-22 |
| KR102480417B1 (ko) | 2022-12-22 |
| WO2020060308A1 (ko) | 2020-03-26 |
| EP3832422A1 (en) | 2021-06-09 |
| US20210341940A1 (en) | 2021-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102480417B1 (ko) | 전자 장치 및 전자 장치의 차량 제어 방법, 서버 및 서버의 정밀 지도 데이터 제공 방법 | |
| KR102420568B1 (ko) | 차량의 위치를 결정하는 방법 및 이를 위한 차량 | |
| US11988526B2 (en) | Method of providing detailed map data and system therefor | |
| US10845457B2 (en) | Drone localization | |
| US11157001B2 (en) | Device and method for assisting with driving of vehicle | |
| CN108732589B (zh) | 利用3d lidar和定位自动采集用于对象识别的训练数据 | |
| CN107449433B (zh) | 用于收集用于更新地理数据库的观测数据的方法及装置 | |
| US20210063172A1 (en) | Navigation system and method using drone | |
| US11119192B2 (en) | Automatic detection of overhead obstructions | |
| EP3671550A1 (en) | Dynamically loaded neural network models | |
| US11227420B2 (en) | Hazard warning polygons constrained based on end-use device | |
| EP3663973A1 (en) | Automatic detection and positioning of structure faces | |
| CN116844025A (zh) | 数据处理方法及相关设备 | |
| US20240202854A1 (en) | Method to compute pedestrian real-time vulnerability index | |
| KR20230108776A (ko) | 자율주행경로 생성 장치 및 방법 | |
| US12606193B2 (en) | Method for determining an optimal location to wait for a left turn to minimize traffic impact | |
| US12298150B2 (en) | Simulation platform for vector map live updates | |
| KR20220059849A (ko) | 경로 이탈 예측 기반 차량 경로 안내 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |