KR20200036038A - 운전 지원 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치 - Google Patents
운전 지원 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치 Download PDFInfo
- Publication number
- KR20200036038A KR20200036038A KR1020207008649A KR20207008649A KR20200036038A KR 20200036038 A KR20200036038 A KR 20200036038A KR 1020207008649 A KR1020207008649 A KR 1020207008649A KR 20207008649 A KR20207008649 A KR 20207008649A KR 20200036038 A KR20200036038 A KR 20200036038A
- Authority
- KR
- South Korea
- Prior art keywords
- correction amount
- vehicle
- lateral
- target path
- lateral correction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0225—Failure correction strategy
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3602—Input other than that of destination using image analysis, e.g. detection of road signs, lanes, buildings, real preceding vehicles using a camera
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3658—Lane guidance
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
- B60W2050/0215—Sensor drifts or sensor failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/20—Direction indicator values
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Navigation (AREA)
Abstract
백선이나 횡단보도가 없는 교차점이어도, 교차점을 우/좌회전에 의해 통과한 후의 자차 위치를 차선 내 중앙에 접근시키는 것. 자동 운전 주행 중 내비게이션 오차를 보정하는 내비게이션 제어 유닛(3)을 구비하는 자동 운전 차량의 위치 오차 보정 장치에 있어서, 내비게이션 제어 유닛(3)은, 목표 경로를 보정하는 목표 경로 보정기(36)에, 도로 경계 정보 통합부(361)와, 횡보정량 산출부(362)와, 횡병행 이동부(363)를 갖는다. 도로 경계 정보 통합부(361)는, 자차가 주행하는 차선의 차선 경계를 검출한다. 횡보정량 산출부(362)는, 차선 경계의 검출 결과와 지도 상에 있어서의 목표 경로의 위치 관계를 비교함으로써 목표 경로의 횡보정량 목표값을 산출하고, 횡보정량 목표값을 얻는 목표 경로의 횡이동 속도를, 자차의 차량 자세각인 방각에 따라 변화시킴으로써 횡보정량을 산출한다. 횡병행 이동부(363)는, 횡보정량이 산출되면, 목표 경로를 횡보정량만큼 종방향의 병행 이동에 의해 보정한다.
Description
본 개시는, 운전 지원 주행 중, 자차 위치와 목표 경로 사이에서 생기는 오차를 보정하는 운전 지원 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치에 관한 것이다.
종래, 교차점을 주행 중, 횡단보도의 검출에 의해 교차점 위치를 산출한다. 그리고, 지도 정보에서의 교차점 위치 정보에 기초하여 산출된 교차점 위치가 자차의 자기 위치를 보정에 적정한 위치라고 판정되면, 자차의 자기 위치를 보정하는 자차량 위치 보정 장치가 알려져 있다(예를 들어, 특허문헌 1 참조).
그러나, 종래 장치에 있어서는, 자차의 자기 위치 보정이 적용되는 것이, 횡단보도가 있는 교차점에 한정된다고 하는 문제가 있었다.
본 개시는, 상기 문제에 착안하여 이루어진 것이며, 백선이나 횡단보도가 없는 교차점이어도, 교차점을 우/좌회전에 의해 통과한 후의 자차 위치를 차선 내 중앙에 접근시키는 것을 목적으로 한다.
상기 목적을 달성하기 위해, 본 개시는, 운전 지원 주행 중, 자차 위치와 목표 경로 사이에서 생기는 오차를 보정하는 컨트롤러를 구비한다.
이 운전 지원 차량의 위치 오차 보정 방법에 있어서, 자차가 주행하는 차선의 차선 경계를 검출한다.
검출된 차선 경계와 지도 상에 있어서의 목표 경로의 위치 관계를 비교함으로써 목표 경로의 횡보정량 목표값을 산출한다.
횡보정량 목표값을 얻는 목표 경로의 횡이동 속도를, 자차의 차량 자세각인 방각(方角)에 따라 변화시킴으로써 횡보정량을 산출한다.
목표 경로를, 횡보정량만큼 횡방향으로 병행 이동시킴으로써 보정한다.
상기한 바와 같이 횡보정량 목표값을 자차의 차량 자세각인 방각에 따라 변화시켜 횡보정량을 산출함으로써, 백선이나 횡단보도가 없는 교차점에서도, 교차점을 우/좌회전에 의해 통과한 후의 자차 위치를 차선 내 중앙에 접근시킬 수 있다.
도 1은 실시예 1의 위치 오차 보정 방법 및 위치 오차 보정 장치가 적용된 자동 운전 제어 시스템을 나타내는 전체 시스템도이다.
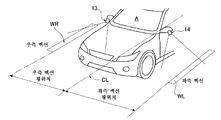
도 2는 실시예 1에 있어서 차량 탑재 센서 중 우측방 인식 카메라 및 좌측방 인식 카메라를 나타내는 사시도이다.
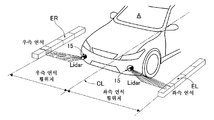
도 3은 실시예 1에 있어서 차량 탑재 센서 중 차량 전방의 좌우 위치에 마련된 라이더를 나타내는 사시도이다.
도 4는 실시예 1에 있어서 내비게이션 제어 유닛에 갖는 목표 경로 보정기를 나타내는 전체 블록도이다.
도 5는 도 4에 도시하는 목표 경로 보정기 중 횡보정량 산출부를 나타내는 상세 블록도이다.
도 6은 도 5에 도시하는 횡보정량 산출부 중 레이트 리미터부를 나타내는 상세 블록도이다.
도 7은 지도 좌표계와 차량 좌표계와 방각과 지도 좌표계에 있어서의 횡보정량의 위도 방향 성분 및 경도 방향 성분과 차량 좌표계에 있어서의 횡보정량의 횡방향 성분 및 종방향 성분을 도시하는 설명도이다.
도 8은 백선을 갖지 않는 교차점에서 생성되는 목표 경로 TL1(보정 전)ㆍ목표 경로 TL2(보정 후, 차량 자세 무시)ㆍ목표 경로 TL3(보정 후, 차량 자세 고려)의 비교를 나타내는 목표 경로 대비 설명도이다.
도 9는 백선을 갖지 않는 교차점에서의 목표 경로 TL2(보정 후, 차량 자세 무시)와 목표 경로 TL3(보정 후, 차량 자세 고려)으로 비교한 횡보정량 변화 특성과 목표 경로 TL3(보정 후, 차량 자세 고려)에 의한 차량 자세각(방각)의 변화 특성을 도시하는 타임 차트이다.
도 2는 실시예 1에 있어서 차량 탑재 센서 중 우측방 인식 카메라 및 좌측방 인식 카메라를 나타내는 사시도이다.
도 3은 실시예 1에 있어서 차량 탑재 센서 중 차량 전방의 좌우 위치에 마련된 라이더를 나타내는 사시도이다.
도 4는 실시예 1에 있어서 내비게이션 제어 유닛에 갖는 목표 경로 보정기를 나타내는 전체 블록도이다.
도 5는 도 4에 도시하는 목표 경로 보정기 중 횡보정량 산출부를 나타내는 상세 블록도이다.
도 6은 도 5에 도시하는 횡보정량 산출부 중 레이트 리미터부를 나타내는 상세 블록도이다.
도 7은 지도 좌표계와 차량 좌표계와 방각과 지도 좌표계에 있어서의 횡보정량의 위도 방향 성분 및 경도 방향 성분과 차량 좌표계에 있어서의 횡보정량의 횡방향 성분 및 종방향 성분을 도시하는 설명도이다.
도 8은 백선을 갖지 않는 교차점에서 생성되는 목표 경로 TL1(보정 전)ㆍ목표 경로 TL2(보정 후, 차량 자세 무시)ㆍ목표 경로 TL3(보정 후, 차량 자세 고려)의 비교를 나타내는 목표 경로 대비 설명도이다.
도 9는 백선을 갖지 않는 교차점에서의 목표 경로 TL2(보정 후, 차량 자세 무시)와 목표 경로 TL3(보정 후, 차량 자세 고려)으로 비교한 횡보정량 변화 특성과 목표 경로 TL3(보정 후, 차량 자세 고려)에 의한 차량 자세각(방각)의 변화 특성을 도시하는 타임 차트이다.
이하, 본 개시에 의한 운전 지원 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치를 실현하는 최선의 실시 형태를, 도면에 나타내는 실시예 1에 기초하여 설명한다.
실시예 1
우선, 구성을 설명한다.
실시예 1에 있어서의 위치 오차 보정 방법 및 위치 오차 보정 장치는, 내비게이션 제어 유닛에서 생성되는 목표 경로 정보를 사용하고, 자동 운전 모드의 선택에 의해 조타/구동/제동이 자동 제어되는 자동 운전 차량(운전 지원 차량의 일례)에 적용한 것이다. 이하, 실시예 1의 구성을, 「전체 시스템 구성」, 「내비게이션 제어 유닛의 상세 구성」, 「목표 경로 보정기의 전체 구성」, 「횡보정량 산출부의 상세 구성」, 「레이트 리미터부의 상세 구성」으로 나누어 설명한다.
[전체 시스템 구성]
도 1은, 실시예 1의 위치 오차 보정 방법 및 위치 오차 보정 장치가 적용된 자동 운전 제어 시스템을 나타낸다. 도 2는, 차량 탑재 센서 중 우측방 인식 카메라 및 좌측방 인식 카메라를 나타내고, 도 3은, 차량 탑재 센서 중 차량 전방의 좌우 위치에 마련된 라이더를 나타낸다. 이하, 도 1 내지 도 3에 기초하여 전체 시스템 구성을 설명한다.
자동 운전 제어 시스템은, 도 1에 도시하는 바와 같이, 차량 탑재 센서(1)와, 주위 환경 인식 유닛(2)과, 내비게이션 제어 유닛(3)과, 자동 운전 제어 유닛(4)과, 액추에이터(5)를 구비하고 있다. 또한, 주위 환경 인식 유닛(2), 내비게이션 제어 유닛(3), 자동 운전 제어 유닛(4)은, CPU 등의 연산 처리 장치를 구비하고, 연산 처리를 실행하는 컴퓨터이다.
차량 탑재 센서(1)는, 자동 운전 차량에 탑재되어, 자차의 주변 정보를 취득하는 센서이다. 전방 인식 카메라(11)와, 후방 인식 카메라(12)와, 우측방 인식 카메라(13)와, 좌측방 인식 카메라(14)와, 라이더(15)와, 레이더(16)를 갖는다. 또한, 자차의 주변 정보 이외의 자동 운전 제어에 필요한 정보를 취득하는 센서류로서, 도시되지 않은 차속 센서나 자이로 센서나 윙커(winker) 스위치 등을 갖는다.
전방 인식 카메라(11), 후방 인식 카메라(12), 우측방 인식 카메라(13), 좌측방 인식 카메라(14)를 조합하여 주위 인식 카메라(AVM: 어라운드ㆍ뷰ㆍ모니터)가 구성된다. 이 주위 인식 카메라에서는, 자차 주행로 상 물체ㆍ자차 주행로 외 물체(도로 구조물, 선행차, 후속차, 대향차, 주위 차량, 보행자, 자전거, 이륜차)ㆍ자차 주행로(도로 백선, 도로 경계, 정지선, 횡단 보도)ㆍ도로 표지(제한 속도) 등이 검지된다.
우측방 인식 카메라(13)는, 도 2에 도시하는 바와 같이, 우측 도어 미러에 내장된 어안 카메라이며, 우측 백선 횡위치 검출 기능을 갖는다. 좌측방 인식 카메라(14)는, 도 2에 도시하는 바와 같이, 좌측 도어 미러에 내장된 어안 카메라이며, 좌측 백선 횡위치 검출 기능을 갖는다.
또한, 우측 백선 횡위치란, 자차 A의 차폭 방향 중심선 CL의 위치로부터 우측 백선 WR의 내측 단부 위치까지의 길이를 말한다. 좌측 백선 횡위치란, 자차 A의 차폭 방향 중심선 CL의 위치로부터 좌측 백선 WL의 내측 단부 위치까지의 길이를 말한다. 또한, 우측 백선 WR과 좌측 백선 WL은, 좌우의 차선 경계이며, 우측 백선 횡위치와 좌측 백선 횡위치는, 좌우의 차선 경계 검출 결과로 여겨진다.
라이더(15)와 레이더(16)는, 자차의 전방 단부 위치에, 출력파의 조사 축을 차량 전방으로 향하게 하여 배치되어, 반사파를 받음으로써 자차 전방의 물체 존재를 검지함과 함께, 자차 전방의 물체까지의 거리를 검지한다. 라이더(15)와 레이더(16)라는 2종류의 측거 센서를 조합하여 라이더/레이더가 구성되고, 예를 들어 레이저 레이더, 밀리미터파 레이더, 초음파 레이더, 레이저 레인지 파인더 등을 사용할 수 있다. 이 라이더(15)와 레이더(16)에서는, 자차 주행로 상 물체ㆍ자차 주행로 외 물체(도로 구조물, 선행차, 후속차, 대향차, 주위 차량, 보행자, 자전거, 이륜차) 등의 위치와 물체까지의 거리를 검지한다.
여기서, 라이더(15)는, 도 3에 도시하는 바와 같이, 자차 A의 전방 단부 좌우 위치에 오른쪽 경사 하향과 왼쪽 경사 하향으로 스윙 가능하게 마련되어, 우측 연석 횡위치 검출 기능과 좌측 연석 횡위치 검출 기능을 갖는다. 또한, 우측 연석 횡위치란, 자차 A의 차폭 방향 중심선 CL의 위치로부터 우측 연석 ER의 내측 단부 위치까지의 길이를 말한다. 좌측 연석 횡위치란, 자차 A의 차폭 방향 중심선 CL의 위치로부터 좌측 연석 EL의 내측 단부 위치까지의 길이를 말한다. 또한, 우측 연석 ER과 좌측 연석 EL은, 좌우의 도로단이며, 우측 연석 횡위치로부터 소정 거리 내측 위치와 좌측 연석 횡위치로부터 소정 거리 내측 위치가, 좌우의 차선 경계 검출 결과로 여겨진다.
주위 환경 인식 유닛(2)은, 각 인식 카메라(11, 12, 13, 14)로부터의 화상 데이터와 라이더/레이더(15, 16)로부터 물체 데이터를 입력한다. 이 주위 환경 인식 유닛(2)은, 화상 데이터와 물체 데이터의 캘리브레이션 데이터를 생성하는 캘리브레이션 처리부(21)와, 캘리브레이션 데이터에 기초하여 물체 인식 처리를 행하는 물체 인식 처리부(22)를 갖는다.
캘리브레이션 처리부(21)는, 각 인식 카메라(11, 12, 13, 14)로부터의 화상 데이터의 파라미터와, 라이더/레이더(15, 16)로부터 물체 데이터의 파라미터를 추정하고, 파라미터를 사용하여 화상 데이터나 물체 데이터의 캘리브레이션 데이터를 생성하여 출력한다. 예를 들어, 각 인식 카메라(11, 12, 13, 14)로부터의 화상 데이터의 경우, 파라미터를 사용하여 광축이나 렌즈 변형의 보정 등을 행한다.
물체 인식 처리부(22)는, 캘리브레이션 처리부(21)로부터의 캘리브레이션 데이터를 입력하고, 캘리브레이션 데이터에 기초하여 물체 인식 처리를 행하고, 인식 결과 데이터를 출력한다. 이 물체 인식 처리부(22)에서는, 예를 들어 화상 데이터와 물체 데이터를 비교 처리하고, 화상 데이터에 의한 물체 후보의 위치에 물체 데이터에 의해 물체가 존재하는 것이 확인되면, 물체의 존재를 인식함과 함께 물체가 무엇인지를 인식한다.
내비게이션 제어 유닛(3)은, GNSS 안테나(31)로부터의 자차 위치 정보를 입력하고, 도로 정보를 포함하는 지도 데이터와 위성 통신을 이용한 GPS(전지구 측위 시스템)를 조합하여, 루트 검색에 의해 현재 위치로부터 목적지까지의 목표 경로를 생성한다. 그리고, 생성된 목표 경로를 지도 상에 표시함과 함께, 목표 경로 정보를 출력한다.
여기서, 「GNSS」는 「Global Navigation Satellite System: 전지구 항법 위성 시스템」의 약칭이며, 「GPS」는 「Global Positioning System」의 약칭이다. 또한, 내비게이션 제어 유닛(3)의 상세 구성에 대해서는 후술한다.
자동 운전 제어 유닛(4)은, 주위 환경 인식 유닛(2)의 물체 인식 처리부(22)로부터의 인식 결과 데이터와, 내비게이션 제어 유닛(3)으로부터의 목표 경로 정보를 입력한다. 그리고, 입력 정보에 기초하여 목표 차속이나 목표 가속도나 목표 감속도를 생성한다. 또한, 생성된 목표 가속도에 의해 구동 제어 명령값을 연산하고, 연산 결과를 구동 액추에이터(51)로 출력한다. 생성된 목표 감속도에 의해 제동 제어 명령값을 연산하고, 연산 결과를 제동 액추에이터(52)로 출력한다. 입력된 목표 경로 정보에 의해 타각 제어 명령값을 연산하고, 연산 결과를 타각 액추에이터(53)로 출력한다.
액추에이터(5)는, 구동 액추에이터(51)와, 제동 액추에이터(52)와, 타각 액추에이터(53)를 갖는다.
구동 액추에이터(51)는, 자동 운전 제어 유닛(4)으로부터 구동 제어 명령값을 입력하고, 구동원 구동력을 제어하는 액추에이터이다. 즉, 엔진차의 경우에는, 엔진 액추에이터를 사용한다. 하이브리드차의 경우에는, 엔진 액추에이터와 모터 액추에이터를 사용한다. 전기 자동차의 경우, 모터 액추에이터를 사용한다.
제동 액추에이터(52)는, 자동 운전 제어 유닛(4)으로부터 제동 제어 명령값을 입력하여, 브레이크 제동력을 제어하는 액추에이터이다. 또한, 제동 액추에이터(52)로서는, 유압 부스터나 전동 부스터 등을 사용한다.
타각 액추에이터(53)는, 자동 운전 제어 유닛(4)으로부터 타각 제어 명령값을 입력하여, 조타륜의 전타각을 제어하는 액추에이터이다. 또한, 타각 액추에이터(53)로서는, 타각 제어 모터 등을 사용한다.
[내비게이션 제어 유닛의 상세 구성]
목적지를 설정하고, 최적인 목표 경로를 연산하고, 자동 운전용 목표 경로를 표시하는 내비게이션 제어 유닛(3)의 상세 구성을, 도 1에 기초하여 설명한다.
내비게이션 제어 유닛(3)은, 도 1에 도시하는 바와 같이, GNSS 안테나(31, 31)와, 위치 정보 처리부(32)와, 목적지 설정부(33)와, 지도 데이터 기억부(34)와, 루트 검색 처리부(35)와, 목표 경로 보정기(36)와, 표시 디바이스(37)를 구비하고 있다.
GNSS 안테나(31, 31)는, 자차의 전후 위치에 장착함으로써, 자차의 차량 자세각인 방각 정보를, 그 위치 관계로 취득한다. 또한, GNSS 안테나(31, 31)에 의한 수신 상황이 악화되었을 때는, 차량에 탑재된 자이로 센서로부터의 센서 정보에 기초하여 요 레이트 정보를 취득하고, 취득한 요 레이트 정보를 적분함으로써 방각 정보를 보간한다.
위치 정보 처리부(32)는, GNSS 안테나(31, 31)로부터 입력되는 위성 통신 정보에 기초하여, 자차의 정차 위치나 자차의 주행 위치의 위도ㆍ경도의 검출 처리를 행한다. 위치 정보 처리부(32)로부터의 자차 위치 정보는, 루트 검색 처리부(35)로 출력된다.
목적지 설정부(33)는, 운전자에 의한 표시 디바이스(37)의 표시 화면으로의 터치 패널 조작 등에 의해, 자차의 목적지의 입력 설정을 행한다. 목적지 설정부(33)로부터의 목적지 정보는, 루트 검색 처리부(35)로 출력된다.
지도 데이터 기억부(34)는, 위도 경도와 지도 정보가 대응지어진, 소위 전자 지도 데이터의 기억부이다. 지도 데이터에는, 각 지점에 대응지어진 도로 정보를 갖고, 도로 정보는, 노드와, 노드간을 접속하는 링크에 의해 정의된다. 도로 정보는, 도로의 위치/영역에 의해 도로를 특정하는 정보와, 도로마다의 도로 종별, 도로마다의 도로폭, 도로의 형상 정보를 포함한다. 도로 정보는, 각 도로 링크의 식별 정보마다, 교차점의 위치, 교차점의 진입 방향, 교차점의 종별 그 밖의 교차점에 관한 정보를 대응지어 기억한다. 또한, 도로 정보는, 각 도로 링크의 식별 정보마다, 도로 종별, 도로폭, 도로 형상, 직진의 가부, 진행의 우선 관계, 추월의 가부(인접 레인으로의 진입의 가부), 제한 속도, 그 밖의 도로에 관한 정보를 대응지어 기억한다.
루트 검색 처리부(35)는, 위치 정보 처리부(32)로부터의 자차 위치 정보와, 목적지 설정부(33)로부터의 목적지 정보와, 지도 데이터 기억부(34)로부터의 도로지도 정보(도로 지도 데이터)를 입력한다. 그리고, 도로 지도 정보에 기초하여 루트 비용 계산 등에 의해 목표 경로를 생성한다. 또한, 목표 경로의 생성은, GPS와 지도를 사용하여 생성해도 되지만, GPS와 지도를 사용하는 대신에, 선행차가 존재할 때, 선행차의 주행 궤적을 목표 경로로 해도 된다. 이 경우, GPS의 위치 정밀도가 낮을 때, 주행 궤적을 목표 경로로서 사용함으로써 후술하는 목표 경로 보정기(36)에서의 횡병행 이동량이 작아도 되고, 보다 원활한 차량 거동으로 할 수 있다.
목표 경로 보정기(36)는, 물체 인식 처리부(22)로부터의 인식 결과 데이터와, 루트 검색 처리부(35)로부터의 목표 경로를 입력한다. 목표 경로에 추가로, 백선 횡방향 거리(좌우), 정지 물체 횡방향 거리(좌우), 연석 횡방향 거리(좌우), 운전자에 의한 방향 지시기(윙커)의 사용 상황, 차선 변경 상황, 차속 등의 정보를 입력한다. 이들 입력 정보에 기초하여, 자차가 주행하는 차선의 차선 경계를 검출한다. 그리고, 검출된 차선 경계와 지도 상에 있어서의 목표 경로의 위치 관계를 비교하고, 목표 경로가 차선 경계에 대해 소정 거리 이내에 존재하는 경우, 혹은 목표 경로가 차선 경계에 대해 자차와는 반대측에 존재하는 경우, 목표 경로를 횡방향의 병행 이동에 의해 보정한다.
여기서, 「소정 거리」란, 자차가 차선 경계에 접근하였을 때, 운전자에 대해 불안감을 주는 거리를 말하며, 예를 들어 자차의 차폭 방향 중심선으로부터 차선 경계까지가 2m정도(자차의 측면으로부터 차선 경계까지가 1m정도)의 거리로 한다. 또한, 목표 경로가 차선 경계에 대해 자차와는 반대측에 존재하는 경우에는, 자차와의 거리에 상관없이, 목표 경로를 횡방향의 병행 이동에 의해 보정한다.
표시 디바이스(37)는, 지도 데이터 기억부(34)로부터의 지도 데이터 정보와, 목표 경로 보정기(36)로부터의 목표 경로 정보를 입력한다. 그리고, 표시 화면에, 지도와 도로와 목표 경로와 자차 위치와 목적지를 표시한다. 즉, 표시 디바이스(37)는, 자동 운전에 의한 주행 중, 자차가 지도 상에서 어디를 이동하고 있는지 등의 자차 위치 시각 정보를 제공한다.
[목표 경로 보정기의 전체 구성]
도 4는, 실시예 1에 있어서 내비게이션 제어 유닛(3)(컨트롤러)에 갖는 목표 경로 보정기(36)를 나타낸다. 이하, 도 4에 기초하여 목표 경로 보정기(36)의 전체 구성을 설명한다.
목표 경로 보정기(36)는, 자동 운전에 의한 주행 중, 내비게이션 정보를 사용하여 검출한 자차 위치를 지도 정보에 중첩하였을 때, 자차 위치와 목표 경로 사이에서 생기는 내비게이션 오차를, 목표 경로의 횡병행 이동에 의해 보정한다. 이 목표 경로 보정기(36)는, 도 4에 도시하는 바와 같이, 도로 경계 정보 통합부(361)(차선 경계 검출부)와, 횡보정량 산출부(362)와, 횡병행 이동부(363)를 갖는다.
도로 경계 정보 통합부(361)는, 백선 횡방향 거리(좌우), 정지 물체 횡방향 거리(좌우), 연석 횡방향 거리(좌우), 운전자에 의한 방향 지시기(윙커)의 사용 상황, 차선 변경 상황, 차속 등의 정보를 입력한다. 그리고, 자차 A가 주행하는 차선의 차선 경계를 검출하고, 자차 A와 차선 경계 횡방향 거리(좌우)를 횡보정량 산출부(362)로 출력한다.
횡보정량 산출부(362)는, 루트 검색 처리부(35)로부터의 목표 경로와, 도로 경계 정보 통합부(361)로부터의 차선 경계 횡방향 거리(좌우)와, 운전자에 의한 방향 지시기의 사용 상황, 차선 변경 상황, 차속, 방각 등의 정보를 입력한다. 그리고, 검출된 차선 경계와 지도 상에 있어서의 목표 경로의 위치 관계를 비교하여, 목표 경로가 차선 경계에 대해 소정 거리 이내에 존재하는 경우, 혹은 목표 경로가 차선 경계에 대해 자차 A와는 반대측에 존재하는 경우, 목표 경로의 횡보정량을 산출한다.
횡병행 이동부(363)는, 루트 검색 처리부(35)로부터의 목표 경로와, 횡보정량 산출부(362)로부터의 횡보정량을 입력한다. 그리고, 횡보정량이 산출되면, 도 4의 우측 하단 프레임 B에 나타내는 바와 같이, 목표 경로를 횡보정량만큼 횡방향의 병행 이동에 의해 보정하여, 새로운 목표 경로를 생성한다. 이 목표 경로의 횡병행 이동 보정에 의해, 자차 A의 진행 방향과 목표 경로가 어긋나 있을 때, 자차 A의 진행 방향과 새로운 목표 경로 사이의 일치성을 높일 수 있다.
[횡보정량 산출부(362)의 상세 구성]
도 5는, 목표 경로 보정기(36) 중 횡보정량 산출부(362)를 나타낸다. 이하, 도 5에 기초하여 횡보정량 산출부(362)의 상세 구성을 설명한다.
횡보정량 산출부(362)는, 도 5에 도시하는 바와 같이, 횡편차 산출부(362a)와, 위치 관계 이해부(362b)와, 횡보정량 계산부(362c)와, 변화 레이트 최댓값 결정부(362d)와, 레이트 리미터(362e)를 갖는다.
횡편차 산출부(362a)는, 루트 검색 처리부(35)로부터의 목표 경로를 입력하여, 목표 경로와 자차의 횡편차 Y0을 산출한다.
위치 관계 이해부(362b)는, 횡편차 산출부(362a)로부터의 횡편차 Y0과, 도로 경계 정보 통합부(361)로부터의 차선 경계 횡방향 거리(좌우)를 입력한다. 그리고, 목표 경로와 차선 단부의 위치 관계의 비교에 의해, 목표 경로와 차선 경계의 위치 관계를 이해(파악)한다. 이 때, 목표 경로가 차선 경계(왼쪽)에 대해 소정 거리 이내에 존재하는 경우, 혹은 목표 경로가 차선 경계(왼쪽)에 대해 자차와는 반대측에 존재하는 경우, 좌 경계 검출 상황(플래그)을 출력한다. 한편, 목표 경로가 차선 경계(우측)에 대해 소정 거리 이내에 존재하는 경우, 혹은 목표 경로가 차선 경계(우측)에 대해 자차와는 반대측에 존재하는 경우, 우 경계 검출 상황(플래그)을 출력한다.
횡보정량 계산부(362c)는, 위치 관계 이해부(362b)로부터의 좌 경계 검출 상황(플래그) 및 우 경계 검출 상황(플래그)과, 도로 경계 정보 통합부(361)로부터의 차선 경계 횡방향 거리(좌우)를 입력한다. 그리고, 목표 경로의 위치와 자차의 위치가 일치하도록, 목표 경로의 횡보정량을 계산하고, 계산 결과를 횡보정량 목표값으로서 출력한다.
변화 레이트 최댓값 결정부(362d)는, 운전자에 의한 방향 지시기의 사용 상황과, 차선 변경 상황과, 차속과, 좌 경계 검출 상황(플래그)과, 우 경계 검출 상황(플래그)을 입력한다. 그리고, 횡보정량 변화 레이트(목표 경로의 이동 속도)의 하한값과 상한값을 결정한다.
즉, 변화 레이트 최댓값 결정부(362d)는, 목표 경로를 횡방향의 병행 이동에 의해 보정할 때, 횡방향으로 병행 이동시키는 목표 경로의 이동 속도(횡보정량 변화 레이트)를 소정 속도로 규정할 뿐만 아니라, 상황에 따라 가변으로 규정하는 기능을 갖는다.
레이트 리미터부(362e)는, 변화 레이트 최댓값 결정부(362d)로부터의 횡보정량 목표값과, 변화 레이트 최댓값 결정부(362d)로부터의 횡보정량 변화 레이트 하한값 및 횡보정량 변화 레이트 상한값과, 방각을 입력한다. 그리고, 횡보정량 목표값에 대해 횡보정량 변화 레이트(목표 경로의 횡병행 이동 속도)에 의해 제한을 가하여 횡보정량으로 한다.
변화 레이트 최댓값 결정부(362d)는, 저차속 시 변화 억제부(362d1)와, 제1 레이트 전환부(362d2)와, 제2 레이트 전환부(362d3)와, 제3 레이트 전환부(362d4)와, 제4 레이트 전환부(362d5)와, 제1 레이트 적산부(362d6)와, 제2 레이트 적산부(362d7)를 갖는다.
저 차속 시 변화 억제부(362d1)는, 차속을 입력하고, 자차의 차속이 저하되면, 차속 저하에 따라 목표 경로의 이동 속도를 작게 하게 차속 대응 변화 레이트를 정한다. 그리고, 자차가 정차되면, 차속 대응 변화 레이트를 제로로 한다.
제1 레이트 전환부(362d2)는, 차선 변경 상황을 트리거로 하여, 차선 변경이 없는 통상 주행 씬일 때, 차속 대응 변화 레이트를 선택하고, 차선 변경 상황이 입력되면, 변화 레이트를 제로로 전환한다.
제2 레이트 전환부(362d3)는, 운전자에 의한 방향 지시기 사용 상황을 트리거로 하여, 방향 지시기 불사용일 때, 제1 레이트 전환부(362d2)로부터의 변화 레이트로 전환하고, 방향 지시기 사용 상황이 입력되면 변화 레이트=∞로 전환한다.
제3 레이트 전환부(362d4)는, 우 경계 검출 상황(플래그)을 트리거로 하여, 레이트 대(고정값)와 레이트 소(고정값)를 전환한다.
제4 레이트 전환부(362d5)는, 좌 경계 검출 상황(플래그)을 트리거로 하여, 레이트 대(고정값)와 레이트 소(고정값)를 전환한다.
제1 레이트 적산부(362d6)는, 제2 레이트 전환부(362d3)로부터의 변화 레이트와, 제3 레이트 전환부(362d4)로부터의 변화 레이트를 입력하고, 양 변화 레이트의 적산에 의해 횡보정량 변화 레이트 상한값을 산출한다.
제2 레이트 적산부(362d7)는, 제2 레이트 전환부(362d3)로부터의 변화 레이트와, 제4 레이트 전환부(362d5)로부터의 변화 레이트를 입력하고, 양 변화 레이트의 적산에 의해 횡보정량 변화 레이트 상한값을 산출한다.
이 변화 레이트 최댓값 결정부(362d)에서는, 하기에 열거하는 바와 같이, 목표 경로를 횡병행 이동에 의한 보정할 때의 이동 속도(변화 레이트)를 제어한다.
(a) 목표 경로를 횡방향으로 병행 이동시킬 때, 자차가 차선 변경하면, 차선 변경 중, 목표 경로의 이동 속도를 제로로 하고, 병행 이동량을 유지한다(제1 레이트 전환부(362d2)).
(b) 목표 경로를 횡방향으로 병행 이동시킬 때, 자차의 차속이 저하되면, 차속 저하에 따라 목표 경로의 이동 속도를 작게 한다(저 차속 시 변화 억제부(362d1)).
(c) 목표 경로를 횡방향으로 병행 이동시킬 때, 자차가 정차하면, 목표 경로의 이동 속도를 제로로 하고, 병행 이동량을 유지한다(저 차속 시 변화 억제부(362d1)).
(d) 목표 경로를 횡방향으로 병행 이동시킬 때, 자차의 근처에 좌우 차선 단부를 검출하지 않으면, 좌우로의 목표 경로의 이동 속도를 느리게 한다(제3, 제4 레이트 전환부(362d4, 362d5)).
(e) 목표 경로를 횡방향으로 병행 이동시킬 때, 좌측만 자차의 근처에 차선 단부를 검출하면, 좌측으로의 목표 경로의 이동 속도를 느리게 하고, 우측으로의 목표 경로의 이동 속도를 빠르게 한다(제3, 제4 레이트 전환부(362d4, 362d5)).
(f) 목표 경로를 횡방향으로 병행 이동시킬 때, 우측만 자차의 근처에 차선 단부를 검출하면, 좌측으로의 목표 경로의 이동 속도를 빠르게 하고, 우측으로의 목표 경로의 이동 속도를 느리게 한다(제3, 제4 레이트 전환부(362d4, 362d5)).
(g) 목표 경로를 횡방향으로 병행 이동시킬 때, 자차의 근처에 좌우 차선 단부를 검출하면, 좌우로의 목표 경로의 이동 속도를 빠르게 한다(제3, 제4 레이트 전환부(362d4, 362d5))
[레이트 리미터부의 상세 구성]
도 6은, 도 5에 도시하는 횡보정량 산출부(362) 중 레이트 리미터부(362e)를 나타내며, 도 7은, 레이트 리미터부(362e)를 설명하는 데 필요한 지도 좌표계와 차량 좌표계와 방각 등을 나타낸다. 이하, 도 6 및 도 7에 기초하여, 레이트 리미터부(362e)의 상세 구성을 설명한다.
레이트 리미터부(362e)는, 도 6에 도시하는 바와 같이, 레이트 리미터(362e1)와, 회전 변환부(362e2)와, X 방향 보정량 판독부(362e3)와, Y 방향 보정량 판독부(362e4)와, 회전 역변환부(362e5)와, 종보정량 감소부(362e6)를 갖는다.
레이트 리미터(362e1)는, 횡보정량 변화 레이트 상한값과, 횡보정량 변화 레이트 하한값과, AVM 등으로 산출한 횡보정량 목표값과, 회전 역변환부(362e5)로부터의 방각에 따른 횡보정량을 입력한다. 그리고, 횡보정량 목표값을, 변화 레이트 상한값과 변화 레이트 하한값과 방각에 따른 횡보정량에 의해 제한함으로써, 최종적인 횡보정량을 출력한다.
회전 변환부(362e2)는, 방각과, 레이트 리미터(362e1)로부터의 횡보정량과, 종보정량 감소부(362e6)로부터의 종보정량(횡보정량의 종방향 성분)을 입력한다. 그리고, 레이트 리미터(362e1)로부터의 차량 좌표계에 의한 횡보정량을, 도 7에 도시하는 바와 같이, 방각을 사용하여 지도 좌표계로 회전 변환하고, 지도 좌표계에서의 X 방향 보정량(횡보정량의 경도 방향 성분)과 Y 방향 보정량(횡보정량의 위도 방향 성분)을 출력한다.
X 방향 보정량 판독부(362e3)는, 회전 변환부(362e2)로부터 지도 좌표계에서의 X 방향 보정량(횡보정량의 경도 방향 성분)을 입력한다. 그리고, 1스텝 전의 X 방향 보정량(횡보정량의 경도 방향 성분)을 판독한다.
Y 방향 보정량 판독부(362e4)는, 회전 변환부(362e2)로부터 지도 좌표계로의 Y 방향 보정량(횡보정량의 위도 방향 성분)을 입력한다. 그리고, 1스텝 전의 Y 방향 보정량(횡보정량의 위도 방향 성분)을 판독한다.
회전 역변환부(362e5)는, 방각과, 1스텝 전의 X 방향 보정량(횡보정량의 경도 방향 성분)과, 1스텝 전의 Y 방향 보정량(횡보정량의 위도 방향 성분)을 입력한다. 그리고, 지도 좌표계에 의한 횡보정량을, 방각을 사용하여 차량 좌표계로 회전 역변환하고, 차량 좌표계에서의 횡보정량(차량 좌표계에서의 횡방향 성분)과 종보정량(차량 좌표계에서의 종방향 성분)을 출력한다.
종보정량 감소부(362e6)는, 회전 역변환부(362e5)로부터 종보정량(차량 좌표계에서의 종방향 성분)을 입력하고, 1 미만의 감소 계수에 의해 점차 감소시킨 종보정량을 회전 변환부(362e2)로 출력한다.
다음에, 작용을 설명한다.
실시예 1의 작용을, 「비교예에서의 위치 오차 보정 작용」, 「실시예 1에서의 위치 오차 보정 작용」으로 나누어 설명한다.
[비교예에서의 위치 오차 보정 작용]
도 8은, 백선을 갖지 않는 교차점에서 생성되는 목표 경로 TL1(보정 전)ㆍ목표 경로 TL2(보정 후, 차량 자세 무시)의 비교를 나타낸다. 도 9는, 백선을 갖지 않는 교차점에서의 목표 경로 TL2(보정 후, 차량 자세 무시)와 목표 경로 TL3(보정 후, 차량 자세 고려)으로 비교한 횡보정량 변화 특성을 나타낸다. 이하, 도 8 및 도 9에 기초하여 비교예에서의 위치 오차 보정 작용을 설명한다.
우선, 비교예는, 보정 전의 목표 경로 TL1에 대해, 횡이동 보정을 행하되 방각을 입력 정보에 포함하지 않고 차량 자세를 무시한 것으로 한다.
GPS 위치 어긋남은, 단시간으로 한정하면 지도 좌표계에서 보았을 때 어느 쪽 방각에 일정값만큼 어긋나 있다. 그러나, 이것을 보정하려고 하는 경우, 자차의 진행 방향의 법선 성분은 각종 센서로부터 보정 가능하지만, 진행 방향은 정보가 부족하기 때문에 어렵다.
이에 비하여, 비교예와 같이, 법선 방향 성분만을 취급하여(횡보정량이라고 칭함), 도로 경계 정보로부터 갱신을 행하는 것도 고려된다. 그러나, 교차점에서 우/좌회전을 행할 때, 교차점 내에서는 통상 백선이 없기 때문에, 도로 경계를 얻지 못하고, 진행 방향도 바뀌어 버리기 때문에, 정확한 보정이 행해지지 않는다.
즉, 횡이동 보정을 행하되 방각을 입력 정보에 포함하지 않고 차량 자세를 무시한 비교예의 경우, 도 8에 도시하는 바와 같이, 보정 전의 목표 경로 TL1에 비해, 보정 후의 목표 경로 TL2(보정 후, 차량 자세 무시)는, 곡률 변화부가 크게 커브 외측으로 불룩해지게 된다. 그리고, 교차점을 빠져 나왔을때 자차 A의 위치가 좌우 백선의 센터 라인으로부터 벗어나게 된다.
이 때문에, 백선을 갖지 않는 교차점에서는, 도 9의 목표 경로 TL2(보정 후, 차량 자세 무시)의 횡보정량 변화 특성에 나타내는 바와 같이, 시각 t1로부터 방각이 좌회전 측으로 변화를 개시하였을 때, 교차점을 빠져 나와 직진 주행에 들어갈 때까지 시각 t1 내지 시각 t3까지의 소요 시간 ΔT2를 요한다.
[실시예 1에서의 위치 오차 보정 작용]
도 8은, 백선을 갖지 않는 교차점에서 생성되는 목표 경로 TL1(보정 전)ㆍ목표 경로 TL2(보정 후, 차량 자세 무시)ㆍ목표 경로 TL3(보정 후, 차량 자세 고려)의 비교를 나타낸다. 도 9는, 백선을 갖지 않는 교차점에서의 목표 경로 TL2(보정 후, 차량 자세 무시)와 목표 경로 TL3(보정 후, 차량 자세 고려)으로 비교한 횡보정량 변화 특성과 목표 경로 TL3(보정 후, 차량 자세 고려)에 의한 차량 자세각(방각)의 변화 특성을 나타낸다. 이하, 도 6, 도 8 및 도 9에 기초하여 실시예 1에서의 위치 오차 보정 작용을 설명한다.
우선, 레이트 리미터부(362e)에 있어서의 방각에 따른 횡보정량의 산출 작용을 설명한다. 레이트 리미터(362e1)에 있어서, 횡보정량 변화 레이트 상한값과, 횡보정량 변화 레이트 하한값과, AVM 등으로 산출한 횡보정량 목표값과, 회전 역변환부(362e5)로부터의 방각에 따른 횡보정량이 입력된다. 그리고, 횡보정량 목표값을, 변화 레이트 상한값과 변화 레이트 하한값과 방각에 따른 횡보정량에 의해 제한함으로써, 최종적인 횡보정량이 출력된다. 이 때, 회전 역변환부(362e5)로부터의 방각에 따른 횡보정량은, 하기의 처리에 의해 얻어진다.
회전 변환부(362e2)에 있어서, 방각과, 레이트 리미터(362e1)로부터의 횡보정량과, 종보정량 감소부(362e6)로부터의 종보정량(횡보정량의 종방향 성분)이 입력된다. 그리고, 레이트 리미터(362e1)로부터의 차량 좌표계에 의한 횡보정량이, 방각을 사용하여 지도 좌표계로 회전 변환되고, 지도 좌표계에서의 X 방향 보정량(횡보정량의 경도 방향 성분)과 Y 방향 보정량(횡보정량의 위도 방향 성분)이 출력된다.
X 방향 보정량 판독부(362e3)에 있어서, 회전 변환부(362e2)로부터 지도 좌표계에서의 X 방향 보정량(횡보정량의 경도 방향 성분)이 입력되고, 1스텝 전의 X 방향 보정량(횡보정량의 경도 방향 성분)이 판독된다. Y 방향 보정량 판독부(362e4)에 있어서, 회전 변환부(362e2)로부터 지도 좌표계에서의 Y 방향 보정량(횡보정량의 위도 방향 성분)이 입력되어, 1스텝 전의 Y 방향 보정량(횡보정량의 위도 방향 성분)이 판독된다.
그리고, 회전 역변환부(362e5)에 있어서, 방각과, 1스텝 전의 X 방향 보정량(횡보정량의 경도 방향 성분)과, 1스텝 전의 Y 방향 보정량(횡보정량의 위도 방향 성분)이 입력된다. 그리고, 지도 좌표계에 의한 횡보정량이, 방각을 사용하여 차량 좌표계로 회전 역변환되어, 차량 좌표계에서의 횡보정량(차량 좌표계에서의 횡방향 성분)과 종보정량(차량 좌표계에서의 종방향 성분)이 출력된다. 이 때, 종보정량 감소부(362e6)에 있어서, 회전 역변환부(362e5)로부터 종보정량(차량 좌표계에서의 종방향 성분)이 입력되어, 1 미만의 감소 계수에 의해 점차 감소시킨 종보정량이 회전 변환부(362e2)로 출력된다.
이와 같이, 실시예 1은, 횡보정량을, 지도 좌표계에서 본 경도 방향 성분과 위도 방향 성분의 양쪽에 의해 취급하는 것이다. 그리고, 목표 경로의 횡이동 속도를 자차의 방각에 따라 변화시킬 때, 차량 좌표계에 의한 횡보정량을 방각에 따라해 지도 좌표계로 회전 변환을 행하고, 이 때, 차량 좌표계의 진행 방향의 법선 방향 성분인 횡방향 성분만을 갱신하고, 진행 방향 성분인 종방향 성분은 불변으로 하고 있다. 그 후, 지도 좌표계를 차량 좌표계로 되돌리는 역회전 변환을 행한다. 더욱 상세하게는, 목표 경로의 횡이동 속도를 자차의 방각에 따라 변화시킬 때, 어느 제어 스텝에 있어서의 횡보정량이 지도 좌표계인 X,Y 좌표계로 기억된다. 다음 스텝에서 X 방향 성분과 Y 방향 성분이 판독되고, 그 스텝에 있어서의 차량 자세각(방각)만큼 역회전 변환함으로써 차량 좌표계에 있어서의 종횡 성분으로 변환된다. 그리고, 새롭게 차선 경계 검출 결과를 사용하여 얻어진 횡보정량 목표값과 비교되어, 그 스텝에서의 최종적인 횡보정량이 산출된다. 그리고, 재차, 차량 자세각(방각)만큼 회전 변환하여 X,Y 좌표계에서의 횡보정량이 산출된다. 이 처리가 반복된다.
따라서, 횡이동 보정을 행하되 방각을 입력 정보에 포함하고, 차량 자세를 고려한 실시예 1의 경우, 도 8에 도시하는 바와 같이, 보정 전의 목표 경로 TL1에 비해, 보정 후의 목표 경로 TL3(보정 후, 차량 자세 고려)은, 곡률 변화부가 커브 외측으로 부푸는 것이 억제된다. 그리고, 교차점을 빠져 나갔을 때 자차 A의 위치가 좌우 백선의 센터 라인의 거의 일치한다.
이 때문에, 백선을 갖지 않는 교차점에서는, 도 9의 목표 경로 TL3(보정 후, 차량 자세 고려)에 있어서 화살표 C로 둘러싸인 횡보정량 변화 특성에 나타내는 바와 같이, 횡보정량의 저하 구배가 커지고, 횡병행 이동 속도가 높아진다. 이 결과, 시각 t1로부터 방각이 좌회전 측으로 변화를 개시하였을 때, 교차점을 빠져나와 직진 주행에 들어가기까지 시각 t1 부터 시각 t2까지의 소요 시간 ΔT1(<ΔT2)로 단축된다.
다음으로, 효과를 설명한다.
실시예 1에 있어서의 자동 운전 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치에 있어서는, 하기에 열거하는 효과가 얻어진다.
(1) 운전 지원 주행 중(자동 운전 주행 중), 자차 위치와 목표 경로 사이에서 생기는 오차를 보정하는 컨트롤러(내비게이션 제어 유닛(3))를 구비한다.
이 운전 지원 차량(자동 운전 차량)의 위치 오차 보정 방법에 있어서, 자차가 주행하는 차선의 차선 경계를 검출한다.
검출된 차선 경계와 지도 상에 있어서의 목표 경로의 위치 관계를 비교함으로써 목표 경로의 횡보정량 목표값을 산출한다.
횡보정량 목표값을 얻는 목표 경로의 횡이동 속도를, 자차의 차량 자세각인 방각에 따라 변화시킴으로써 횡보정량을 산출한다.
목표 경로를, 횡보정량만큼 횡방향으로 병행 이동시킴으로써 보정한다(도 8).
이 때문에, 백선이나 횡단보도가 없는 교차점이어도, 교차점을 우/좌회전에 의해 통과한 후의 자차 위치를 차선 내 중앙에 접근시키는 운전 지원 차량(자동 운전 차량)의 위치 오차 보정 방법을 제공할 수 있다.
(2) 횡보정량을, 지도 좌표계에서 본 경도 방향 성분과 위도 방향 성분의 양쪽에 의해 취급하는 것이다.
목표 경로의 횡이동 속도를 자차의 방각에 따라 변화시킬 때, 차량 좌표계에 의한 횡보정량을 방각에 따라 지도 좌표계로 회전 변환을 행하고, 이 때, 차량 좌표계의 진행 방향의 법선 방향 성분인 횡방향 성분만을 갱신하고, 진행 방향 성분인 종방향 성분은 불변으로 한다.
그 후, 지도 좌표계를 차량 좌표계로 되돌리는 역회전 변환을 행한다(도 6).
이 때문에, (1)의 효과에 추가로, 지도 좌표계 상에서 횡보정량을 값뿐만 아니라 방향을 가진 벡터값으로서 취급함으로써, 교차점 이외의 S자 커브로 주행 등, 보다 복잡한 자세 변화에 대해서도 대처할 수 있다.
(3) 목표 경로의 횡이동 속도를 자차의 방각에 따라 변화시킬 때, 어느 제어 스텝에 있어서의 횡보정량을 지도 좌표계인 X,Y 좌표계로 기억하고, 다음 스텝에서 X 방향 성분과 Y 방향 성분을 판독하고, 그 스텝에 있어서의 차량 자세각(방각)만큼 역회전 변환하여 차량 좌표계에 있어서의 종횡 성분으로 변환하고, 새롭게 차선 경계 검출 결과를 사용하여 얻어진 횡보정량 목표값과 비교하여, 그 스텝에 있어서의 최종적인 횡보정량을 산출하고, 재차, 차량 자세각(방각)만큼 회전 변환하여 X,Y 좌표계에서의 횡보정량을 산출한다(도 6).
이 때문에, (2)의 효과에 추가로, 시간의 경과와 함께 방각이 변화되는 커브로에서의 주행에 있어서 반복 산출 처리가 실행됨으로써, 커브로에서 응답성이 양호한 차량 자세각의 변화를 달성할 수 있다.
(4) 종방향 성분은, 시간의 경과에 따라 점차 감소시킨다(도 6).
이 때문에, (2) 또는 (3)의 효과에 추가로, 원칙으로서 유지하고 있는 횡보정량의 종방향 을 감소시켜 감으로써, 시간의 경과와 함께 목표 경로 정보의 종방향의 어긋남양이 확대되는 것을 억제할 수 있다. 즉, 종방향은 차선 경계(백선)의 정보만으로는 보정이 어렵고, 또한, 오랜 시간 경과해 버린 경우, 목표 경로의 종방향의 어긋남양에 변화가 나타난다.
(5) 자차의 차량 자세각인 방각 정보는, 2대의 GNSS 안테나(31, 31)를 자차에 장착함으로써, 그 위치 관계로 취득한다.
GNSS 안테나(31, 31)에 의한 수신 상황이 악화되었을 때에는, 차량에 탑재된 자이로 센서로부터의 센서 정보에 기초하여 요 레이트 정보를 취득하고, 취득한 요 레이트 정보를 적분함으로써 방각 정보를 보간한다(도 1).
이 때문에, (1) 내지 (4)의 효과에 추가로, GPS 수신 상황이 악화되었을 때도, 방각을 이용한 횡병행 이동에 의한 보정을 계속할 수 있다.
(6) 운전 지원 주행 중(자동 운전 주행 중), 자차 위치와 목표 경로 사이에서 생기는 오차를 보정하는 컨트롤러(내비게이션 제어 유닛(3))를 구비한다.
이 운전 지원 차량(자동 운전 차량)의 위치 오차 보정 장치에 있어서, 컨트롤러(내비게이션 제어 유닛(3))는, 목표 경로를 보정하는 목표 경로 보정기(36)를 갖는다. 또한, 목표 경로 보정기(36)는, 차선 경계 검출부(도로 경계 정보 통합부(361))와, 횡보정량 산출부(362)와, 횡병행 이동부(363)를 갖는다.
차선 경계 검출부(도로 경계 정보 통합부(361))는, 자차가 주행하는 차선의 차선 경계를 검출한다.
횡보정량 산출부(362)는, 차선 경계의 검출 결과와 지도 상에 있어서의 목표 경로의 위치 관계를 비교함으로써 목표 경로의 횡보정량 목표값을 산출하고, 횡보정량 목표값을 얻는 목표 경로의 횡이동 속도를, 자차의 차량 자세각인 방각에 따라 변화시킴으로써 횡보정량을 산출한다.
횡병행 이동부(363)는, 횡보정량이 산출되면, 목표 경로를 횡보정량만큼 횡방향으로 병행 이동시킴으로써 보정한다(도 4).
이 때문에, 백선이나 횡단보도가 없는 교차점이어도, 교차점을 우/좌회전에 의해 통과한 후의 자차 위치를 차선 내 중앙에 접근시키는 운전 지원 차량(자동 운전 차량)의 위치 오차 보정 장치를 제공할 수 있다.
이상, 본 개시의 운전 지원 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치를 실시예 1에 기초하여 설명하였다. 그러나, 구체적인 구성에 대해서는, 이 실시예 1에 한정되는 것은 아니고, 청구범위의 각 청구항에 관한 발명의 요지를 일탈하지 않는 한, 설계의 변경이나 추가 등은 허용된다.
실시예 1에서는, 횡보정량을 산출하고, 횡병행 이동에 의한 목표 경로의 보정만을 행하는 예를 나타내었다. 그러나, 목표 경로의 횡보정뿐만 아니라, 방각을 사용함으로써 횡보정량의 종방향 성분이 취득되면, 목표 경로를, 종방향 성분만큼 종방향으로 병행 이동시켜 보정하는 종보정을 추가해도 된다. 이 종보정을 추가하면, 정지선까지의 거리 등을 지도 정보로부터 보다 정확하게 산출할 수 있게 되어, 보다 원활한 정차를 할 수 있게 된다.
실시예 1에서는, 자차의 현재 위치로부터 목적지까지의 목표 경로를 생성하는 컨트롤러로서, 내비게이션 제어 유닛(3)을 사용하는 예를 나타내었다. 그러나, 자차의 현재 위치로부터 목적지까지의 목표 경로를 생성하는 컨트롤러로서는, 자동 운전 제어 유닛으로 하는 예로 해도 된다. 또한, 목표 경로 생성 기능을 둘로 나누어, 일부를 내비게이션 제어 유닛에서 분담하고, 나머지를 자동 운전 제어 유닛에서 분담하는 예로 해도 된다.
실시예 1에서는, 본 개시의 위치 오차 보정 방법 및 위치 오차 보정 장치를 자동 운전 모드의 선택에 의해 조타/구동/제동이 자동 제어되는 자동 운전 차량에 적용하는 예를 나타내었다. 그러나, 본 개시의 위치 오차 보정 방법 및 위치 오차 보정 장치는, 운전자에 의한 조타 운전/구동 운전/제동 운전 중, 일부의 운전을 지원하는 운전 지원 차량이어도 된다. 요컨대, 내비게이션 시스템에 의한 위치 오차를 보정함으로써 운전자의 운전 지원을 하는 차량이면 적용할 수 있다.
Claims (6)
- 운전 지원 주행 중, 자차 위치와 목표 경로 사이에서 생기는 오차를 보정하는 컨트롤러를 구비하는 운전 지원 차량의 위치 오차 보정 방법에 있어서,
자차가 주행하는 차선의 차선 경계를 검출하고,
상기 차선 경계의 검출 결과와 지도 상에 있어서의 상기 목표 경로의 위치 관계를 비교함으로써 상기 목표 경로의 횡보정량 목표값을 산출하고,
상기 횡보정량 목표값을 얻는 상기 목표 경로의 횡이동 속도를, 자차의 차량 자세각인 방각에 따라 변화시킴으로써 횡보정량을 산출하고,
상기 목표 경로를, 상기 횡보정량만큼 종방향으로 병행 이동시킴으로써 보정하는
것을 특징으로 하는 운전 지원 차량의 위치 오차 보정 방법. - 제1항에 있어서,
상기 횡보정량을, 지도 좌표계에서 본 경도 방향 성분과 위도 방향 성분의 양쪽에 의해 취급하는 것이며,
상기 목표 경로의 횡이동 속도를 자차의 방각에 따라 변화시킬 때, 차량 좌표계에 의한 횡보정량을 방각에 따라 지도 좌표계로 회전 변환을 행하고, 이 때, 차량 좌표계의 진행 방향의 법선 방향 성분인 종방향 성분만을 갱신하고, 진행 방향 성분인 종방향 성분은 불변으로 하고,
그 후, 지도 좌표계를 차량 좌표계로 되돌리는 역회전 변환을 행하는
것을 특징으로 하는 운전 지원 차량의 위치 오차 보정 방법. - 제2항에 있어서,
상기 목표 경로의 횡이동 속도를 자차의 방각에 따라 변화시킬 때, 어떤 제어 스텝에 있어서의 횡보정량을 지도 좌표계인 X,Y 좌표계로 기억하고, 다음 스텝에서 X 방향 성분과 Y 방향 성분을 판독하고, 그 스텝에 있어서의 차량 자세각(방각)만큼 역회전 변환하여 차량 좌표계에 있어서의 종횡 성분으로 변환하고, 새롭게 차선 경계 검출 결과를 사용하여 얻어진 횡보정량 목표값과 비교하여, 그 스텝에 있어서의 최종적인 횡보정량을 산출하고, 재차, 차량 자세각(방각)만큼 회전 변환하여 X,Y 좌표계에서의 횡보정량을 산출하는
것을 특징으로 하는 운전 지원 차량의 위치 오차 보정 방법. - 제2항 또는 제3항에 있어서,
상기 종방향 성분은, 시간의 경과에 따라 점차 감소시키는
것을 특징으로 하는 운전 지원 차량의 위치 오차 보정 방법. - 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 자차의 차량 자세각인 방각 정보는, 2대의 GNSS 안테나를 자차에 장착함으로써, 그 위치 관계로 취득하고,
상기 GNSS 안테나에 의한 수신 상황이 악화되었을 때에는, 차량에 탑재된 자이로 센서로부터의 센서 정보에 기초하여 요 레이트 정보를 취득하고, 취득한 요 레이트 정보를 적분함으로써 방각 정보를 보간하는
것을 특징으로 하는 운전 지원 차량의 위치 오차 보정 방법. - 운전 지원 주행 중, 자차 위치와 목표 경로 사이에서 생기는 오차를 보정하는 컨트롤러를 구비하는 운전 지원 차량의 위치 오차 보정 장치에 있어서,
상기 컨트롤러는, 목표 경로를 보정하는 목표 경로 보정기를 갖고,
상기 목표 경로 보정기는,
자차가 주행하는 차선의 차선 경계를 검출하는 차선 경계 검출부와,
상기 차선 경계의 검출 결과와 지도 상에 있어서의 상기 목표 경로의 위치 관계를 비교함으로써 상기 목표 경로의 횡보정량 목표값을 산출하고, 횡보정량 목표값을 얻는 상기 목표 경로의 횡이동 속도를, 자차의 차량 자세각인 방각에 따라 변화시킴으로써 횡보정량을 산출하는 횡보정량 산출부와,
상기 횡보정량이 산출되면, 상기 목표 경로를 상기 횡보정량만큼 종방향으로 병행 이동시킴으로써 보정하는 횡병행 이동부,
를 갖는 것을 특징으로 하는 운전 지원 차량의 위치 오차 보정 장치.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/031168 WO2019043833A1 (ja) | 2017-08-30 | 2017-08-30 | 運転支援車両の位置誤差補正方法及び位置誤差補正装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200036038A true KR20200036038A (ko) | 2020-04-06 |
Family
ID=65525842
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207008649A Withdrawn KR20200036038A (ko) | 2017-08-30 | 2017-08-30 | 운전 지원 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10988139B2 (ko) |
| EP (1) | EP3678110B1 (ko) |
| JP (1) | JP6658978B2 (ko) |
| KR (1) | KR20200036038A (ko) |
| CN (1) | CN111066071B (ko) |
| BR (1) | BR112020003996A2 (ko) |
| CA (1) | CA3074414A1 (ko) |
| MX (1) | MX2020002227A (ko) |
| RU (1) | RU2738491C1 (ko) |
| WO (1) | WO2019043833A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102851675B1 (ko) * | 2024-10-17 | 2025-08-28 | 주식회사 긴트 | 농기계의 주행방향 판단방법 및 그 장치 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3074413A1 (en) * | 2017-08-30 | 2019-03-07 | Nissan Motor Co., Ltd. | Position correction method and position error correction device for drive-assisted vehicle |
| JP6985176B2 (ja) * | 2018-02-16 | 2021-12-22 | 本田技研工業株式会社 | 車両制御装置 |
| CN109795477B (zh) * | 2019-02-22 | 2020-11-06 | 百度在线网络技术(北京)有限公司 | 消除稳态横向偏差的方法、装置及存储介质 |
| CN111854727B (zh) * | 2019-04-27 | 2022-05-13 | 北京魔门塔科技有限公司 | 一种车辆位姿的修正方法和装置 |
| JP7143947B2 (ja) * | 2019-05-15 | 2022-09-29 | 日産自動車株式会社 | 自己位置補正方法及び自己位置補正装置 |
| US20210064031A1 (en) * | 2019-08-28 | 2021-03-04 | Zenuity Ab | Path planning for autonomous and semi-autonomous vehicles |
| US20210064042A1 (en) * | 2019-08-28 | 2021-03-04 | Zenuity Ab | Path planning for autonomous and semi-autonomous vehicles |
| CN112629544B (zh) * | 2019-10-09 | 2022-12-02 | 北京魔门塔科技有限公司 | 一种基于车道线的车辆定位方法及装置 |
| CN115427759B (zh) * | 2020-04-08 | 2023-08-29 | 日产自动车株式会社 | 地图信息校正方法、驾驶辅助方法及地图信息校正装置 |
| US11904890B2 (en) * | 2020-06-17 | 2024-02-20 | Baidu Usa Llc | Lane change system for lanes with different speed limits |
| US11993274B2 (en) * | 2020-09-16 | 2024-05-28 | Zenuity Ab | Monitoring of on-board vehicle image capturing device functionality compliance |
| KR102948431B1 (ko) * | 2020-11-13 | 2026-04-07 | 현대자동차주식회사 | 횡방향 움직임의 자율 제어장치 및 그 제어방법 |
| CN112665538B (zh) * | 2020-12-09 | 2023-10-13 | 云南昆船电子设备有限公司 | 车辆自主导航横向测距系统及方法 |
| CN112731320B (zh) * | 2020-12-29 | 2024-06-21 | 福瑞泰克智能系统有限公司 | 车载雷达误差数据的估计方法、装置、设备及存储介质 |
| CN113176779B (zh) * | 2021-04-28 | 2023-05-26 | 上海布鲁可积木科技有限公司 | 用于运动装置的控制方法、系统、存储介质及运动装置 |
| DE102021127070A1 (de) * | 2021-10-19 | 2023-04-20 | Cariad Se | Verfahren zum Bestimmen einer Soll-Trajektorie eines zumindest teilweise automatisiert betriebenen Kraftfahrzeugs auf einer einspurigen Fahrbahn, Computerprogrammprodukt sowie Assistenzsystem |
| KR102603534B1 (ko) * | 2021-10-21 | 2023-11-16 | 한국교통대학교산학협력단 | Ldm 정보와 환경 센서를 이용한 차량의 측위 개선 방법 및 장치 |
| CN114114369B (zh) * | 2022-01-27 | 2022-07-15 | 智道网联科技(北京)有限公司 | 自动驾驶车辆定位方法和装置、电子设备和存储介质 |
| KR20230122352A (ko) * | 2022-02-14 | 2023-08-22 | 현대자동차주식회사 | 센서 퓨전에 의한 객체 추적 방법 및 이를 적용한 차량용 운전 시스템 |
| US12612046B2 (en) | 2022-02-28 | 2026-04-28 | Nissan North America, Inc. | Vehicle drivable area detection system configured to detect data representing vertical obstacles and a drivable area from a point cloud and provide the data to a driver assist component |
| US11919451B2 (en) | 2022-02-28 | 2024-03-05 | Nissan North America, Inc. | Vehicle data display system |
| US12344244B2 (en) | 2022-02-28 | 2025-07-01 | Nissan North America, Inc. | Vehicle lane marking detection system |
| CN114993333B (zh) * | 2022-05-27 | 2025-09-26 | 智道网联科技(北京)有限公司 | 自动驾驶车辆的融合定位方法、装置及电子设备 |
| CN115950441B (zh) * | 2023-03-08 | 2023-07-07 | 智道网联科技(北京)有限公司 | 自动驾驶车辆的融合定位方法、装置及电子设备 |
| TWI863664B (zh) * | 2023-10-31 | 2024-11-21 | 友達光電股份有限公司 | 導航路線控制方法及裝置 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011174877A (ja) | 2010-02-25 | 2011-09-08 | Mitsubishi Electric Corp | 自車両位置補正装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5852070A (ja) | 1981-09-17 | 1983-03-28 | 日立造船株式会社 | ヘリコイダルサイロ |
| JP4983132B2 (ja) | 2006-07-26 | 2012-07-25 | 株式会社デンソー | 車両の方向特定方法,および,車両方向特定装置。 |
| US8775063B2 (en) * | 2009-01-26 | 2014-07-08 | GM Global Technology Operations LLC | System and method of lane path estimation using sensor fusion |
| MX2014000649A (es) * | 2011-08-02 | 2014-04-30 | Nissan Motor | Dispositivo de asistencia de manejo y metodo de asistencia de manejo. |
| RU2659341C2 (ru) | 2013-04-01 | 2018-06-29 | Су-Мин ПАРК | Система автоматического управления транспортным средством |
| JP5802241B2 (ja) * | 2013-07-04 | 2015-10-28 | 富士重工業株式会社 | 車両の運転支援制御装置 |
| JP6178704B2 (ja) * | 2013-11-15 | 2017-08-09 | アジア航測株式会社 | 計測点高付与システム、計測点高付与方法および計測点高付与プログラム |
| JP6152069B2 (ja) * | 2014-04-22 | 2017-06-21 | 本田技研工業株式会社 | 走行支援装置 |
| JP2016084092A (ja) * | 2014-10-28 | 2016-05-19 | 富士重工業株式会社 | 車両の走行制御装置 |
| JP6237656B2 (ja) * | 2015-01-19 | 2017-11-29 | トヨタ自動車株式会社 | 車両システム |
| JP6350383B2 (ja) * | 2015-05-01 | 2018-07-04 | トヨタ自動車株式会社 | 車両走行制御装置 |
| JP6376055B2 (ja) * | 2015-06-26 | 2018-08-22 | 株式会社デンソー | 車線逸脱抑制システム |
| JP6259797B2 (ja) * | 2015-10-22 | 2018-01-10 | 本田技研工業株式会社 | 車両走行制御装置 |
| JP6815724B2 (ja) * | 2015-11-04 | 2021-01-20 | トヨタ自動車株式会社 | 自動運転システム |
| JP2017182521A (ja) * | 2016-03-31 | 2017-10-05 | 日立オートモティブシステムズ株式会社 | 車両用走行制御装置 |
| CN106052705A (zh) | 2016-05-31 | 2016-10-26 | 惠州华阳通用电子有限公司 | 一种车载综合导航方法及装置 |
| CN107085938B (zh) * | 2017-06-08 | 2019-07-02 | 中南大学 | 基于车道线与gps跟随的智能驾驶局部轨迹容错规划方法 |
-
2017
- 2017-08-30 US US16/641,770 patent/US10988139B2/en active Active
- 2017-08-30 EP EP17923821.7A patent/EP3678110B1/en active Active
- 2017-08-30 WO PCT/JP2017/031168 patent/WO2019043833A1/ja not_active Ceased
- 2017-08-30 MX MX2020002227A patent/MX2020002227A/es unknown
- 2017-08-30 RU RU2020112175A patent/RU2738491C1/ru active
- 2017-08-30 KR KR1020207008649A patent/KR20200036038A/ko not_active Withdrawn
- 2017-08-30 CN CN201780093971.7A patent/CN111066071B/zh active Active
- 2017-08-30 CA CA3074414A patent/CA3074414A1/en not_active Abandoned
- 2017-08-30 JP JP2019538821A patent/JP6658978B2/ja active Active
- 2017-08-30 BR BR112020003996-9A patent/BR112020003996A2/pt not_active Application Discontinuation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011174877A (ja) | 2010-02-25 | 2011-09-08 | Mitsubishi Electric Corp | 自車両位置補正装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102851675B1 (ko) * | 2024-10-17 | 2025-08-28 | 주식회사 긴트 | 농기계의 주행방향 판단방법 및 그 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111066071A (zh) | 2020-04-24 |
| MX2020002227A (es) | 2020-07-14 |
| CN111066071B (zh) | 2021-08-17 |
| JP6658978B2 (ja) | 2020-03-04 |
| US10988139B2 (en) | 2021-04-27 |
| EP3678110B1 (en) | 2022-08-10 |
| RU2738491C1 (ru) | 2020-12-14 |
| JPWO2019043833A1 (ja) | 2020-02-06 |
| WO2019043833A1 (ja) | 2019-03-07 |
| EP3678110A4 (en) | 2020-09-09 |
| BR112020003996A2 (pt) | 2020-09-01 |
| US20200377089A1 (en) | 2020-12-03 |
| CA3074414A1 (en) | 2019-03-07 |
| EP3678110A1 (en) | 2020-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200036038A (ko) | 운전 지원 차량의 위치 오차 보정 방법 및 위치 오차 보정 장치 | |
| JP6642772B2 (ja) | 運転支援車両の位置誤差補正方法及び位置誤差補正装置 | |
| CN111226267B (zh) | 驾驶辅助车辆的行驶控制方法及行驶控制装置 | |
| CN106080595B (zh) | 车辆行驶控制装置 | |
| WO2019187716A1 (ja) | 駐車支援装置 | |
| CN107054361A (zh) | 车辆的转向控制装置 | |
| JP7377822B2 (ja) | 運転支援方法及び運転支援装置 | |
| US20210291855A1 (en) | Static-state curvature error compensation control logic for autonomous driving vehicles | |
| WO2020255751A1 (ja) | 自動運転システム | |
| WO2018211645A1 (ja) | 運転支援方法及び運転支援装置 | |
| CN110114634B (zh) | 外界识别系统 | |
| US11231501B2 (en) | Front and side three-LIDAR design for autonomous driving vehicles | |
| US12277732B2 (en) | Video camera calibration refinement for autonomous driving vehicles | |
| JP7845039B2 (ja) | 車両の運転支援方法及び運転支援装置 | |
| CN117465438A (zh) | 车辆的驾驶支援装置 | |
| JP7652286B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP7722126B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP2020021295A (ja) | 運転支援方法及び運転支援装置 | |
| US20210096249A1 (en) | Front and side four-lidar design for autonomous driving vehicles | |
| WO2024069690A1 (ja) | 運転支援方法及び運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A302 | Request for accelerated examination | ||
| PA0105 | International application |
Patent event date: 20200325 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PA0302 | Request for accelerated examination |
Patent event date: 20200325 Patent event code: PA03022R01D Comment text: Request for Accelerated Examination |
|
| PG1501 | Laying open of application | ||
| PC1202 | Submission of document of withdrawal before decision of registration |
Comment text: [Withdrawal of Procedure relating to Patent, etc.] Withdrawal (Abandonment) Patent event code: PC12021R01D Patent event date: 20200409 |
|
| WITB | Written withdrawal of application |