KR20200037200A - 복수의 로봇 청소기 및 그 제어방법 - Google Patents
복수의 로봇 청소기 및 그 제어방법 Download PDFInfo
- Publication number
- KR20200037200A KR20200037200A KR1020200040457A KR20200040457A KR20200037200A KR 20200037200 A KR20200037200 A KR 20200037200A KR 1020200040457 A KR1020200040457 A KR 1020200040457A KR 20200040457 A KR20200040457 A KR 20200040457A KR 20200037200 A KR20200037200 A KR 20200037200A
- Authority
- KR
- South Korea
- Prior art keywords
- robot cleaner
- area
- robot
- cleaning
- cleaners
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
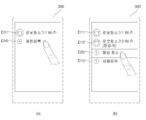
Links
Images















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
도 2는 도 1의 로봇 청소기(100)를 상측에서 바라본 입면도이다.
도 3은 도 1의 로봇 청소기(100)를 정면에서 바라본 입면도이다.
도 4는 도 1의 로봇 청소기(100)를 하측에서 바라본 입면도이다.
도 5는 도 1의 로봇 청소기(100)의 주요 구성들 간의 제어관계를 도시한 블록도이다.
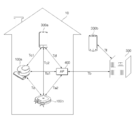
도 6은 도 1의 복수의 로봇 청소기(100a, 100b)와 단말기(300)의 네트워크를 도시한 개념도이다.
도 7은, 도 6의 네트워크의 일 예를 도시한 개념도이다.
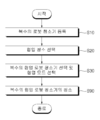
도 8은, 본 발명의 일 실실시예에 따른 복수의 로봇 청소기의 제어방법을 도시한 순서도이다.
도 9는, 본 발명의 제 1실시예에 따른 복수의 로봇 청소기(100a, 100b)의 제어방법을 도시한 순서도이다.
도 10은, 본 발명의 제 2실시예에 따른 복수의 로봇 청소기(100a, 100b)의 제어방법을 도시한 순서도이다.
도 11은 사용자 환경을 나타낸 도면들로서, 도 11(a)에는 도 8 내지 도 10의 로봇 청소기 등록 단계(S10)를 위한 입력 화면이 도시되고, 도 11(b)에는 도 8 내지 도 10의 협업 청소 선택 단계(S20)를 위한 입력 화면이 도시된다.
도 12는 사용자 환경을 나타낸 도면들로서, 도 8 및 도 9의 복수의 협업 로봇 청소기 선택 단계(S30)를 위한 입력 화면이 도시된다.
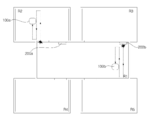
도 13은 복수의 로봇 청소기(100a, 100b)가 각각의 도킹 기기(200a, 200b)에 도킹된 상태의 일예를 보여주는 평면 개념도이다.
도 14는 사용자 환경을 나타낸 도면으로서, 도 8의 협업 모드 선택 단계(S30)에서 제 1모드가 입력되는 화면이 도시된다.
도 15a 및 도 15b는, 상기 제 1모드가 선택된 경우, 도 13의 복수의 로봇 청소기(100a, 100b)이 동작하는 일 시나리오를 보여주는 평면 개념도이다.
도 16은 사용자 환경을 나타낸 도면들로서, 도 16(a)에는 도 8의 협업 모드 선택 단계(S30)에서 제 2모드가 입력되는 화면이 도시되고, 도 16(b)에는 제 1로봇 청소기(100a)가 청소할 영역을 입력하는 화면이 도시되고, 도 16(c)에는 제 2로봇 청소기(100b)가 청소할 영역을 입력하는 화면이 도시된다.
도 17은, 상기 제 2모드가 선택된 경우, 도 13의 복수의 로봇 청소기(100a, 100b)이 동작하는 일 시나리오를 보여주는 평면 개념도이다.
도 18은, 상기 제 1모드가 선택된 경우, 실시예A에 따른 청소 단계(S190)의 흐름을 도시한 순서도이다.
도 19는, 상기 제 2모드가 선택된 경우, 실시예B에 따른 청소 단계(S290)의 흐름을 도시한 순서도이다.
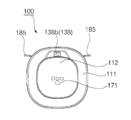
111: 케이스 112: 먼저통 커버
130: 센싱부 131: 거리 감지부
132: 낭떠러지 감지부 138: 영상 감지부
138a: 전방 영상 센서 138b: 상방 영상 센서
138c: 하방 영상 센서 139: 패턴 조사부
139a: 제 1패턴 조사부 139b: 제 2패턴 조사부
138a, 139a, 139b: 3D 센서 140: 제어부
160: 주행부 166: 구동 바퀴
168: 보조 바퀴 171: 입력부
173: 출력부 175: 통신부
177: 배터리 179: 저장부
180: 작업부 180h: 흡입구
184: 메인 브러시 185: 보조 브러시
190: 대응 단자 200: 도킹 기기
210: 충전 단자 300a, 300b: 단말기
400: 무선 공유기 500: 서버
Claims (16)
- 제 1로봇 청소기 및 제 2로봇 청소기가 주행 구역 내 구분된 복수의 영역에 포함되는 제 1영역 및 제 2영역을 순차적으로 청소하되, 상기 제 1로봇 청소기가 상기 제 1영역의 청소를 완료한 후, 상기 제 2로봇 청소기가 상기 제 1영역의 청소를 시작하는 청소 단계를 포함하고,
상기 제 1로봇 청소기와 상기 제 2로봇 청소기는 상기 주행 구역의 맵을 공유하는, 복수의 로봇 청소기의 제어방법. - 제 1항에 있어서,
상기 제 1로봇 청소기와 상기 제 2로본 청소기는 통신부를 통해 상기 주행 구역의 맵을 공유하는 복수의 로봇 청소기의 제어방법. - 제 1항에 있어서,
상기 청소 단계에서,
상기 제 1로봇 청소기가 상기 제 2영역의 청소를 소정 기준 이상 진행한 후, 상기 제 2로봇 청소기가 상기 제 2영역의 청소를 시작하는, 복수의 로봇 청소기의 제어방법. - 제 1항에 있어서,
상기 청소 단계에서,
상기 제 1로봇 청소기가 상기 제 2영역의 청소를 완료한 후, 상기 제 2로봇 청소기가 상기 제 2영역의 청소를 시작하는, 복수의 로봇 청소기의 제어방법. - 제 1항에 있어서,
상기 제 1로봇 청소기는 이물질의 흡입을 수행하고,
상기 제 2로봇 청소기는 걸레질을 수행하는, 복수의 로봇 청소기의 제어방법. - 제 1항에 있어서,
상기 청소 단계 전에, 등록된 복수의 로봇 청소기 중 상기 제 1로봇 청소기 및 상기 제 2로봇 청소기가 선택되는 로봇 청소기 선택단계를 포함하는, 로봇 청소기의 제어방법. - 제 1항에 있어서,
상기 청소 단계 전에, 상기 제 1로봇 청소기 및 상기 제 2로봇 청소기 중 어느 하나인 주 로봇 청소기가 선택되는 주 로봇 선택단계를 포함하고,
상기 청소 단계에서, 상기 주 로봇 청소기가 상기 제 1로봇 청소기 및 상기 제 2로봇 청소기 중 다른 하나의 청소 수행을 제어하는, 로봇 청소기의 제어방법. - 제 1항에 있어서,
상기 청소 단계 전에, 복수의 협업 모드 중 상기 청소 단계를 수행시키도록 기설정된 제 1모드가 선택되는 모드 선택단계를 포함하는, 로봇 청소기의 제어방법. - 제 8항에 있어서,
상기 복수의 협업 모드는, 상기 복수의 영역 중 상기 제 1로봇 청소기가 청소할 영역 및 상기 제 2로봇 청소기가 청소할 영역을 각각 지정하여, 상기 제 1로봇 청소기와 상기 제 2로봇 청소기가 각각의 지정된 영역을 청소하도록 기설정된 제 2모드를 더 포함하는, 로봇 청소기의 제어방법. - 제 1로봇 청소기 및 제 2로봇 청소기를 포함하는 복수의 로봇 청소기에 있어서,
상기 각 로봇 청소기는,
본체;
상기 본체를 이동시키는 주행부;
정보를 송수신하는 통신부;
주행 구역에 대한 정보를 감지하는 센싱부; 및
상기 주행부, 상기 센싱부 및 상기 통신부를 제어하는 제어부를 포함하고,
상기 제어부는,
상기 제 1로봇 청소기 및 상기 제 2로봇 청소기가 상기 주행 구역 내 구분된 복수의 영역에 포함되는 제 1영역 및 제 2영역을 순차적으로 청소하되, 상기 제 1로봇 청소기가 상기 제 1영역의 청소를 완료한 후, 상기 제 2로봇 청소기가 상기 제 1영역의 청소를 시작하도록 상기 주행부를 제어하고,
상기 제어부는 상기 센싱부를 제어하여 상기 주행 구역의 맵을 생성하고, 상기 주행 구역의 맵을 상기 통신부를 제어하여 송신하는 복수의 로봇 청소기. - 제 10항에 있어서,
상기 제어부는,
상기 제 1로봇 청소기가 상기 제 2영역의 청소를 소정 기준 이상 진행한 후, 상기 제 2로봇 청소기가 상기 제 2영역의 청소를 시작하도록 상기 주행부를 제어하는, 복수의 로봇 청소기. - 제 10항에 있어서,
상기 제어부는,
상기 제 1로봇 청소기가 상기 제 2영역의 청소를 완료한 후, 상기 제 2로봇 청소기가 상기 제 2영역의 청소를 시작하도록 상기 주행부를 제어하는 복수의 로봇 청소기. - 제 10항에 있어서,
상기 제 1로봇 청소기는 이물질의 흡입을 수행하고,
상기 제 2로봇 청소기는 걸레질을 수행하는, 복수의 로봇 청소기. - 제 10항에 있어서,
상기 제어부는,
상기 제 1로봇 청소기 및 상기 제 2로봇 청소기 중 어느 하나를 주 로봇 청소기로 선택하고 다른 하나를 종 로봇 청소기로 선택하는 복수의 로봇 청소기. - 제 1항에 있어서,
상기 주 로봇 청소기의 제어부는 상기 종 로봇 청소기의 청소 수행을 제어하는 로봇 청소기. - 제 10항에 있어서,
상기 제어부는,
상기 복수의 영역 중 상기 제 1로봇 청소기가 청소할 영역 및 상기 제 2로봇 청소기가 청소할 영역을 각각 지정하여, 상기 제 1로봇 청소기와 상기 제 2로봇 청소기가 각각의 지정된 영역을 청소하도록 상기 주행부를 제어하는 복수의 로봇 청소기.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200040457A KR102360875B1 (ko) | 2019-07-26 | 2020-04-02 | 복수의 로봇 청소기 및 그 제어방법 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190091122A KR20190090757A (ko) | 2019-07-26 | 2019-07-26 | 복수의 로봇 청소기 및 그 제어방법 |
| KR1020200040457A KR102360875B1 (ko) | 2019-07-26 | 2020-04-02 | 복수의 로봇 청소기 및 그 제어방법 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190091122A Division KR20190090757A (ko) | 2019-07-26 | 2019-07-26 | 복수의 로봇 청소기 및 그 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200037200A true KR20200037200A (ko) | 2020-04-08 |
| KR102360875B1 KR102360875B1 (ko) | 2022-02-08 |
Family
ID=80252468
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200040457A Active KR102360875B1 (ko) | 2019-07-26 | 2020-04-02 | 복수의 로봇 청소기 및 그 제어방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102360875B1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022075615A1 (ko) * | 2020-10-08 | 2022-04-14 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| JP2023534989A (ja) * | 2020-07-20 | 2023-08-15 | アイロボット・コーポレーション | コンテキストおよびユーザ体験ベースのロボット制御 |
| WO2023156840A1 (en) * | 2022-09-30 | 2023-08-24 | Mohammadnejad Zahra | Multiple cooperative vacuum robots based on dynamic mobile ad-hoc networks routing |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102842374B1 (ko) | 2024-07-29 | 2025-08-07 | 충남대학교 산학협력단 | 이동기기와 협력하여 효율적으로 청소를 수행하는 로봇 청소기 및 그 청소 방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003225184A (ja) * | 2002-01-31 | 2003-08-12 | Toshiba Tec Corp | 清掃装置 |
| KR20130053518A (ko) * | 2011-11-14 | 2013-05-24 | 삼성전자주식회사 | 로봇 청소기 및 그 제어 방법 |
| JP2015160022A (ja) * | 2014-02-28 | 2015-09-07 | 東日本旅客鉄道株式会社 | 清掃装置による清掃方法 |
-
2020
- 2020-04-02 KR KR1020200040457A patent/KR102360875B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003225184A (ja) * | 2002-01-31 | 2003-08-12 | Toshiba Tec Corp | 清掃装置 |
| KR20130053518A (ko) * | 2011-11-14 | 2013-05-24 | 삼성전자주식회사 | 로봇 청소기 및 그 제어 방법 |
| JP2015160022A (ja) * | 2014-02-28 | 2015-09-07 | 東日本旅客鉄道株式会社 | 清掃装置による清掃方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023534989A (ja) * | 2020-07-20 | 2023-08-15 | アイロボット・コーポレーション | コンテキストおよびユーザ体験ベースのロボット制御 |
| US12593951B2 (en) | 2020-07-20 | 2026-04-07 | Irobot Corporation | Contextual and user experience based mobile robot control |
| WO2022075615A1 (ko) * | 2020-10-08 | 2022-04-14 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| KR20220047002A (ko) * | 2020-10-08 | 2022-04-15 | 엘지전자 주식회사 | 이동 로봇 시스템 |
| WO2023156840A1 (en) * | 2022-09-30 | 2023-08-24 | Mohammadnejad Zahra | Multiple cooperative vacuum robots based on dynamic mobile ad-hoc networks routing |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102360875B1 (ko) | 2022-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3727122B1 (en) | Robot cleaners and controlling method thereof | |
| TWI731555B (zh) | 移動式機器人及控制複數個移動式機器人的方法 | |
| US11537135B2 (en) | Moving robot and controlling method for the moving robot | |
| KR102048365B1 (ko) | 인공지능을 이용한 이동 로봇 및 이동 로봇의 제어방법 | |
| KR102369661B1 (ko) | 이동 로봇 및 복수의 이동 로봇의 제어방법 | |
| US11297992B2 (en) | Robot cleaner and method for controlling the same | |
| KR102360875B1 (ko) | 복수의 로봇 청소기 및 그 제어방법 | |
| KR102431982B1 (ko) | 복수의 로봇 청소기 및 그 제어 방법 | |
| KR20190035376A (ko) | 인공지능을 이용한 이동 로봇 및 이동 로봇의 제어방법 | |
| EP4090214B1 (en) | CLEANING ROBOT AND ITS CONTROL METHOD | |
| EP3493013B1 (en) | Moving robot and associated control method | |
| KR20230014790A (ko) | 로봇 청소기 및 그 제어 방법 | |
| KR20190090757A (ko) | 복수의 로봇 청소기 및 그 제어방법 | |
| JP2020119561A (ja) | 第1の床処理装置及び第2の床処理装置を有するシステム並びにそのシステムの動作方法 | |
| EP4026468B1 (en) | Robot cleaner and control method therefor | |
| KR102245953B1 (ko) | 복수의 전자기기의 제어방법 | |
| KR20210089461A (ko) | 인공지능을 이용한 이동 로봇 및 이동 로봇의 제어방법 | |
| KR20210089464A (ko) | 인공지능을 이용한 이동 로봇 및 이동 로봇의 제어방법 | |
| KR20250109916A (ko) | 이동 로봇 및 그의 제어방법 | |
| KR20210089463A (ko) | 인공지능을 이용한 이동 로봇 및 이동 로봇의 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20200402 Patent event code: PA01071R01D Filing date: 20190726 Application number text: 1020190091122 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20201203 Comment text: Request for Examination of Application Patent event code: PA02011R04I Patent event date: 20200402 Comment text: Divisional Application of Patent |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20210223 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20210823 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20210223 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20210823 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20210423 Comment text: Amendment to Specification, etc. |
|
| PX0701 | Decision of registration after re-examination |
Patent event date: 20211104 Comment text: Decision to Grant Registration Patent event code: PX07013S01D Patent event date: 20211020 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I Patent event date: 20210823 Comment text: Decision to Refuse Application Patent event code: PX07011S01I Patent event date: 20210423 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220204 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220204 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20250109 Start annual number: 4 End annual number: 4 |