KR20200037313A - 전동식 건설 기계 - Google Patents
전동식 건설 기계 Download PDFInfo
- Publication number
- KR20200037313A KR20200037313A KR1020207005685A KR20207005685A KR20200037313A KR 20200037313 A KR20200037313 A KR 20200037313A KR 1020207005685 A KR1020207005685 A KR 1020207005685A KR 20207005685 A KR20207005685 A KR 20207005685A KR 20200037313 A KR20200037313 A KR 20200037313A
- Authority
- KR
- South Korea
- Prior art keywords
- work
- construction machine
- amount
- work site
- controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2091—Control of energy storage means for electrical energy, e.g. battery or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2246—Control of prime movers, e.g. depending on the hydraulic load of work tools
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/40—Working vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/80—Time limits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/54—Energy consumption estimation
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Sustainable Energy (AREA)
- Sustainable Development (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Operation Control Of Excavators (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
전동식 유압 셔블은, 배터리 장치(19)의 전력에 의해 구동되며, 유압 펌프(29)를 구동하는 전동기(28)와, 컨트롤러(37)와, 표시 장치(24)를 구비한다. 컨트롤러(37)는, 이동 정보 취득 장치에 의해 취득된 유압 셔블의 이동 정보에 의거하여, 유압 셔블이 충전 설비로부터 출발하고 나서 작업 현장에 도착할 때까지의 동안에 소비된 전동기(28)의 소비 전력량을 산출하여 기억한다. 컨트롤러(37)는, 배터리 장치(19)의 축전량으로부터 상기 소비 전력량을 감산하여 작업 현장에서 소비 가능한 전량을 산출하고, 작업 현장에서 소비 가능한 전량에 의거하여 작업 현장에서 가동 가능한 시간을 산출하여, 작업 현장에서 가동 가능한 시간을 표시 장치(24)에 표시시킨다.
Description
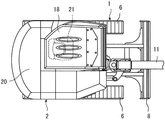
도 2는 본 발명의 일 실시 형태에 있어서의 전동식 유압 셔블의 구조를 나타내는 상면도이다.
도 3은 본 발명의 일 실시 형태에 있어서의 구동 장치의 구성을 나타내는 도이다.
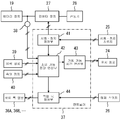
도 4는 본 발명의 일 실시 형태에 있어서의 컨트롤러의 기능적 구성을 관련 기기와 함께 나타내는 도이다.
도 5는 본 발명의 일 실시 형태에 있어서의 컨트롤러의 제 1 처리를 나타내는 플로우 차트이다.
도 6은 본 발명의 일 실시 형태에 있어서의 컨트롤러의 제 2 처리 및 제 3 처리를 나타내는 플로우 차트이다.
도 7은 본 발명의 일 실시 형태에 있어서의 표시 장치의 화면의 구체예를 나타내는 도이다.
도 8은 본 발명의 일 실시 형태에 있어서의 컨트롤러의 제 4 처리 및 제 5 처리를 나타내는 플로우 차트이다.
도 9는 본 발명의 일 변형예에 있어서의 컨트롤러의 기능적 구성을 관련 기기와 함께 나타내는 도이다.
14 붐용 유압 실린더
15 아암용 유압 실린더
16 버킷용 유압 실린더
19 배터리 장치(축전 장치)
24 표시 장치
26 해제 스위치
28 전동기
29 유압 펌프
36A, 36B 작업 록 밸브(작업 록 장치)
37 컨트롤러
39 입력 장치
40 측위 장치
45 이동 입력 스위치
Claims (6)
- 축전 장치와, 상기 축전 장치의 전력에 의해 구동되는 전동기와, 상기 전동기에 의해 구동되는 유압 펌프와, 상기 유압 펌프로부터 토출된 압유에 의해 구동되는 주행용 유압 모터 및 작업용 유압 액추에이터와, 컨트롤러와, 표시 장치를 구비한 전동식 건설 기계에 있어서,
상기 건설 기계의 이동 정보를 취득하는 이동 정보 취득 장치를 더 구비하고,
상기 컨트롤러는,
상기 이동 정보 취득 장치에 의해 취득된 상기 건설 기계의 이동 정보에 의거하여, 상기 건설 기계가 충전 설비로부터 출발하고 나서 작업 현장에 도착할 때까지의 동안에 소비된 상기 전동기의 소비 전력량을 산출하여 기억하며,
상기 축전 장치의 축전량으로부터 상기 소비 전력량을 감산하여 상기 작업 현장에서 소비 가능한 전량을 산출하고,
상기 작업 현장에서 소비 가능한 전량에 의거하여 상기 작업 현장에서 가동 가능한 시간을 산출하며,
상기 작업 현장에서 가동 가능한 시간을 상기 표시 장치에 표시시키는 것을 특징으로 하는 전동식 건설 기계. - 제 1 항에 있어서,
상기 컨트롤러는, 상기 건설 기계가 상기 작업 현장에서 가동되었을 때에 소비된 상기 전동기의 소비 전력량에 의거하여 단위 시간당의 평균 소비 전력을 산출하고, 상기 작업 현장에서 소비 가능한 전량을 상기 평균 소비 전력으로 제산하여, 상기 작업 현장에서 가동 가능한 시간을 산출하는 것을 특징으로 하는 전동식 건설 기계. - 제 1 항에 있어서,
상기 이동 정보 취득 장치는, 상기 충전 설비 및 상기 작업 현장의 위치를 입력하는 입력 장치와, 상기 건설 기계의 위치를 측정하는 측위 장치로 구성되어 있으며,
상기 컨트롤러는, 상기 입력 장치로부터 입력된 상기 충전 설비 및 상기 작업 현장의 위치와 상기 측위 장치에 의해 측정된 상기 건설 기계의 위치에 의거하여, 상기 건설 기계가 상기 충전 설비로부터 출발하고 나서 상기 작업 현장에 도착할 때까지의 동안에 소비된 상기 전동기의 소비 전력량을 산출하는 것을 특징으로 하는 전동식 건설 기계. - 제 1 항에 있어서,
상기 이동 정보 취득 장치는, 상기 건설 기계가 상기 충전 설비로부터 출발하였을 때와 상기 건설 기계가 상기 작업 현장에 도착하였을 때에 조작되는 이동 입력 스위치이며,
상기 컨트롤러는, 상기 이동 입력 스위치의 조작에 의거하여, 상기 건설 기계가 상기 충전 설비로부터 출발하고 나서 상기 작업 현장에 도착할 때까지의 동안에 소비된 상기 전동기의 소비 전력량을 산출하는 것을 특징으로 하는 전동식 건설 기계. - 제 1 항에 있어서,
상기 작업용 유압 액추에이터의 구동의 허가와 금지를 전환하는 작업 록 장치와,
상기 작업용 유압 액추에이터의 구동 금지를 해제하는 지시를 입력하는 해제 스위치를 구비하고,
상기 컨트롤러는,
상기 건설 기계가 상기 충전 설비로부터 출발하고 나서 상기 작업 현장에 도착할 때까지의 동안에 소비된 상기 소비 전력량보다 미리 설정된 소정값만큼 높게 되도록 축전량의 임계값을 설정하며,
상기 축전 장치의 축전량이 상기 임계값까지 저하된 경우에, 상기 작업용 유압 액추에이터의 구동을 금지하도록 상기 작업 록 장치를 제어하고,
그 후, 상기 해제 스위치의 지시가 입력된 경우에, 상기 작업용 유압 액추에이터의 구동 금지를 해제하도록 상기 작업 록 장치를 제어하는 것을 특징으로 하는 전동식 건설 기계. - 제 5 항에 있어서,
상기 컨트롤러는, 상기 해제 스위치의 지시가 입력되고 나서 미리 설정된 소정 시간이 경과할 때까지, 상기 작업용 유압 액추에이터의 구동을 허가하도록 상기 작업 록 장치를 제어하고, 상기 소정 시간이 경과한 후, 상기 작업용 유압 액추에이터의 구동을 금지하도록 상기 작업 록 장치를 제어하는 것을 특징으로 하는 전동식 건설 기계.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/036518 WO2020065996A1 (ja) | 2018-09-28 | 2018-09-28 | 電動式建設機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200037313A true KR20200037313A (ko) | 2020-04-08 |
| KR102391360B1 KR102391360B1 (ko) | 2022-04-27 |
Family
ID=69950397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207005685A Active KR102391360B1 (ko) | 2018-09-28 | 2018-09-28 | 전동식 건설 기계 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11136743B2 (ko) |
| EP (1) | EP3666584B1 (ko) |
| JP (1) | JP6902159B2 (ko) |
| KR (1) | KR102391360B1 (ko) |
| CN (1) | CN111247026A (ko) |
| WO (1) | WO2020065996A1 (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7096177B2 (ja) * | 2019-02-04 | 2022-07-05 | 日立建機株式会社 | 電気駆動式作業機械 |
| JP6955524B2 (ja) * | 2019-03-26 | 2021-10-27 | 株式会社日立建機ティエラ | バッテリ式作業機械 |
| CN115280633A (zh) * | 2020-03-23 | 2022-11-01 | 住友建机株式会社 | 挖土机、信息处理装置及程序 |
| JP7423565B2 (ja) * | 2021-02-24 | 2024-01-29 | ヤンマーホールディングス株式会社 | 電動式作業機械 |
| JP7713822B2 (ja) * | 2021-07-21 | 2025-07-28 | 株式会社小松製作所 | 作業機械、作業機械の制御方法 |
| US12065791B2 (en) | 2021-10-11 | 2024-08-20 | Caterpillar Paving Products Inc. | Systems and methods for managing a worksite based on battery power |
| GB2620140B (en) * | 2022-06-28 | 2025-06-18 | Bamford Excavators Ltd | A control system |
| JP2024098600A (ja) * | 2023-01-11 | 2024-07-24 | 株式会社小松製作所 | 電動作業機械、電動作業機械の制御システムおよび電動作業機械の制御方法 |
| CN118933114B (zh) * | 2024-08-07 | 2025-10-28 | 三一重机有限公司 | 一种移动电源状态监测系统、方法及电动挖掘机 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1077872A (ja) | 1996-08-30 | 1998-03-24 | Hitachi Constr Mach Co Ltd | 作業機械の稼動可能残時間予知装置 |
| JPH11107320A (ja) * | 1997-10-06 | 1999-04-20 | Yutani Heavy Ind Ltd | バッテリ駆動の油圧作業機械 |
| JP2007288894A (ja) * | 2006-04-14 | 2007-11-01 | Hitachi Constr Mach Co Ltd | 作業車両の状態表示装置 |
| JP2008189215A (ja) * | 2007-02-07 | 2008-08-21 | Takeuchi Seisakusho:Kk | 電気駆動式作業車 |
| JP2015182857A (ja) * | 2014-03-25 | 2015-10-22 | 株式会社タダノ | 作業車両 |
| JP2017046379A (ja) * | 2015-08-24 | 2017-03-02 | 九州旅客鉄道株式会社 | 補機平均消費電力推定装置、乗務員支援装置及び方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5202852B2 (ja) | 2006-06-16 | 2013-06-05 | 東海旅客鉄道株式会社 | 防振浮き床構造 |
| US9242633B2 (en) * | 2007-05-10 | 2016-01-26 | Volvo Construction Equipment Ab | Method and a control system for controlling a work machine |
| JP5208074B2 (ja) * | 2009-08-27 | 2013-06-12 | 日立建機株式会社 | 作業機械の遠隔管理システム |
| JP2011142704A (ja) * | 2010-01-05 | 2011-07-21 | Mitsubishi Heavy Ind Ltd | 作業車の二次電池充電マネージメント方法及び充電システム |
| KR20130103305A (ko) * | 2010-06-28 | 2013-09-23 | 볼보 컨스트럭션 이큅먼트 에이비 | 하이브리드식 굴삭기의 제어시스템 |
| KR101657868B1 (ko) * | 2012-06-22 | 2016-09-19 | 히다찌 겐끼 가부시키가이샤 | 건설 기계 |
| KR101958027B1 (ko) * | 2012-12-26 | 2019-07-04 | 두산인프라코어 주식회사 | 하이브리드 건설기계의 엔진 제어 장치 |
| WO2014136834A1 (ja) * | 2013-03-06 | 2014-09-12 | 日立建機株式会社 | 建設機械 |
| CN106574457A (zh) * | 2014-09-24 | 2017-04-19 | 日立建机株式会社 | 工程机械的显示装置 |
| JP6420120B2 (ja) * | 2014-10-27 | 2018-11-07 | 日立建機株式会社 | 建設機械の管理局端末システム |
| JP6430272B2 (ja) * | 2015-01-29 | 2018-11-28 | 日立建機株式会社 | 作業機械の操作支援装置 |
-
2018
- 2018-09-28 WO PCT/JP2018/036518 patent/WO2020065996A1/ja not_active Ceased
- 2018-09-28 CN CN201880055432.9A patent/CN111247026A/zh active Pending
- 2018-09-28 EP EP18932314.0A patent/EP3666584B1/en active Active
- 2018-09-28 JP JP2020509526A patent/JP6902159B2/ja active Active
- 2018-09-28 US US16/645,345 patent/US11136743B2/en active Active
- 2018-09-28 KR KR1020207005685A patent/KR102391360B1/ko active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1077872A (ja) | 1996-08-30 | 1998-03-24 | Hitachi Constr Mach Co Ltd | 作業機械の稼動可能残時間予知装置 |
| JPH11107320A (ja) * | 1997-10-06 | 1999-04-20 | Yutani Heavy Ind Ltd | バッテリ駆動の油圧作業機械 |
| JP2007288894A (ja) * | 2006-04-14 | 2007-11-01 | Hitachi Constr Mach Co Ltd | 作業車両の状態表示装置 |
| JP2008189215A (ja) * | 2007-02-07 | 2008-08-21 | Takeuchi Seisakusho:Kk | 電気駆動式作業車 |
| JP2015182857A (ja) * | 2014-03-25 | 2015-10-22 | 株式会社タダノ | 作業車両 |
| JP2017046379A (ja) * | 2015-08-24 | 2017-03-02 | 九州旅客鉄道株式会社 | 補機平均消費電力推定装置、乗務員支援装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3666584B1 (en) | 2023-09-27 |
| KR102391360B1 (ko) | 2022-04-27 |
| WO2020065996A1 (ja) | 2020-04-02 |
| CN111247026A (zh) | 2020-06-05 |
| US20210222399A1 (en) | 2021-07-22 |
| EP3666584A1 (en) | 2020-06-17 |
| EP3666584A4 (en) | 2021-04-21 |
| JP6902159B2 (ja) | 2021-07-14 |
| JPWO2020065996A1 (ja) | 2021-01-07 |
| US11136743B2 (en) | 2021-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6902159B2 (ja) | 電動式建設機械 | |
| JP7490639B2 (ja) | ショベル | |
| EP4159932B1 (en) | Excavator and excavator system | |
| CN113544338B (zh) | 挖土机及施工系统 | |
| CN108026715A (zh) | 挖土机 | |
| EP3666580B1 (en) | Electric construction machine | |
| KR20220037440A (ko) | 쇼벨 | |
| JP7285679B2 (ja) | ショベル | |
| CN108884669A (zh) | 挖土机 | |
| KR20200039613A (ko) | 쇼벨, 쇼벨의 표시장치 및 쇼벨의 표시방법 | |
| KR20230162605A (ko) | 쇼벨의 표시장치, 쇼벨 | |
| CN115516174A (zh) | 挖土机 | |
| JP2012001913A (ja) | カウンタウェイトの制御装置 | |
| EP4317618B1 (en) | Display device for shovel, shovel, and shovel assistance device | |
| US12618226B2 (en) | Display device for shovel, shovel, and assist device for shovel | |
| JP2026004735A (ja) | 作業機械の制御装置 | |
| JP2024082696A (ja) | ショベル、操作支援方法及び操作支援プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 5 |