KR20200037480A - 건설기계의 제어 시스템 - Google Patents
건설기계의 제어 시스템 Download PDFInfo
- Publication number
- KR20200037480A KR20200037480A KR1020180116713A KR20180116713A KR20200037480A KR 20200037480 A KR20200037480 A KR 20200037480A KR 1020180116713 A KR1020180116713 A KR 1020180116713A KR 20180116713 A KR20180116713 A KR 20180116713A KR 20200037480 A KR20200037480 A KR 20200037480A
- Authority
- KR
- South Korea
- Prior art keywords
- hydraulic
- valve
- arm
- pressure
- line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000010276 construction Methods 0.000 title claims abstract description 23
- 239000010720 hydraulic oil Substances 0.000 claims abstract description 34
- 238000007599 discharging Methods 0.000 claims abstract description 6
- 238000010586 diagram Methods 0.000 description 7
- 239000012530 fluid Substances 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 3
- 230000008929 regeneration Effects 0.000 description 3
- 238000011069 regeneration method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000001172 regenerating effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/04—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed
- F15B11/05—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed specially adapted to maintain constant speed, e.g. pressure-compensated, load-responsive
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
- E02F9/2228—Control of flow rate; Load sensing arrangements using pressure-compensating valves including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2267—Valves or distributors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/04—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed
- F15B11/044—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed by means in the return line, i.e. "meter out"
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/026—Pressure compensating valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/04—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with a single servomotor
- F15B13/0401—Valve members; Fluid interconnections therefor
- F15B13/0402—Valve members; Fluid interconnections therefor for linearly sliding valves, e.g. spool valves
- F15B13/0403—Valve members; Fluid interconnections therefor for linearly sliding valves, e.g. spool valves a secondary valve member sliding within the main spool, e.g. for regeneration flow
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/04—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with a single servomotor
- F15B13/0416—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with a single servomotor with means or adapted for load sensing
- F15B13/0417—Load sensing elements; Internal fluid connections therefor; Anti-saturation or pressure-compensation valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/30525—Directional control valves, e.g. 4/3-directional control valve
- F15B2211/3053—In combination with a pressure compensating valve
- F15B2211/3055—In combination with a pressure compensating valve the pressure compensating valve is arranged between directional control valve and return line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/329—Directional control characterised by the type of actuation actuated by fluid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/405—Flow control characterised by the type of flow control means or valve
- F15B2211/40553—Flow control characterised by the type of flow control means or valve with pressure compensating valves
- F15B2211/40569—Flow control characterised by the type of flow control means or valve with pressure compensating valves the pressure compensating valve arranged downstream of the flow control means
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Fluid-Pressure Circuits (AREA)
Abstract
Description
도 2는 도 1의 건설기계의 유압 시스템의 일부를 확대한 유압 회로도이다.
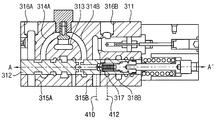
도 3은 예시적인 실시예들에 따른 건설기계의 유압 시스템의 제어 밸브의 일부를 나타내는 단면도이다.
도 4는 도 3의 A-A' 라인을 따라 절단한 단면도이다.
도 5는 도 4의 압력 보상 밸브를 나타내는 단면도이다.
14: 암 로드측 챔버 100: 유압 펌프
200: 메인 유압 라인 210: 병렬 라인
212: 암 헤드 유압 라인 214: 암 로드 유압 라인
222: 제1 리턴 유압 라인 224: 제2 리턴 유압 라인
300: 제1 제어 밸브 310: 제어 밸브, 제2 제어 밸브
311: 밸브 바디 313: 공급 포트
314A: 제1 분기 통로 314B: 제2 분기 통로
315A: 제1 부하 통로 315B: 제2 부하 통로
316A: 제1 부하 포트 316B: 제2 부하 포트
317: 리턴 통로 318B: 제1 탱크 포트
400: 압력 보상 밸브 401A: 제1 수압부
401B: 제2 수압부 402: 보상 스풀
403: 탱크 통로 405: 출구
406: 보상 스프링 410: 제1 파일럿 라인
412: 제2 파일럿 라인
Claims (5)
- 유압 펌프로부터 토출된 작동유에 의해 동작 가능한 유압 실린더;
유압 펌프 및 상기 유압 실린더 사이에 배치되어 내부에 구비된 스풀의 위치에 따라 상기 액추에이터의 동작을 제어하고, 상기 유압 실린더의 챔버로부터 배출되는 작동유를 드레인 탱크로 배출시키기 위한 제1 스풀 위치를 갖는 제어 밸브; 및
상기 제1 스풀 위치에서의 상기 제어 밸브로부터 배출되는 작동유를 상기 탱크로 배출시키는 리턴 유압 라인에 설치되며, 통과하는 작동유의 유량을 상기 제어 밸브의 전단과 후단 사이의 압력 차이에 따라 제어하기 위한 압력 보상 밸브를 포함하는 건설기계의 제어 시스템. - 제 1 항에 있어서, 상기 압력 보상 밸브의 개구량은 상기 챔버에 연통된 로드 유압 라인으로부터 분기된 제1 파일럿 라인을 통해 공급되는 제1 파일럿 압력 및 상기 압력 보상 밸브 전단의 상기 리턴 유압 라인으로부터 분기된 제2 파일럿 라인을 통해 공급되는 제2 파일럿 압력의 압력 차이에 따라 제어되는 건설기계의 제어 시스템.
- 제 1 항에 있어서, 상기 챔버는 상기 유압 실린더의 로드측 챔버인 건설기계의 제어 시스템.
- 제 1 항에 있어서, 상기 유압 실린더는 암 실린더를 포함하는 건설기계의 제어 시스템.
- 제 1 항에 있어서, 상기 압력 보상 밸브의 밸브 바디는 상기 제어 밸브의 밸브 바디에 형성되거나 상기 밸브 바디와는 분리된 별개의 밸브 바디에 형성되는 건설기계의 제어 시스템.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180116713A KR20200037480A (ko) | 2018-10-01 | 2018-10-01 | 건설기계의 제어 시스템 |
| CN201980064464.XA CN112789383A (zh) | 2018-10-01 | 2019-09-27 | 工程机械的控制系统 |
| US17/282,075 US11313104B2 (en) | 2018-10-01 | 2019-09-27 | Control system for construction machinery |
| PCT/KR2019/012585 WO2020071690A1 (ko) | 2018-10-01 | 2019-09-27 | 건설기계의 제어 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180116713A KR20200037480A (ko) | 2018-10-01 | 2018-10-01 | 건설기계의 제어 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200037480A true KR20200037480A (ko) | 2020-04-09 |
Family
ID=70055543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180116713A Ceased KR20200037480A (ko) | 2018-10-01 | 2018-10-01 | 건설기계의 제어 시스템 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11313104B2 (ko) |
| KR (1) | KR20200037480A (ko) |
| CN (1) | CN112789383A (ko) |
| WO (1) | WO2020071690A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116950950A (zh) * | 2023-07-20 | 2023-10-27 | 江苏汇智高端工程机械创新中心有限公司 | 一种流量独立再生控制结构、多路阀及工程机械 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR950002378B1 (ko) * | 1991-11-30 | 1995-03-17 | 삼성중공업주식회사 | 작업장치 작동부의 압력보상용 유량제어 장치 |
| JPH06159306A (ja) * | 1992-11-12 | 1994-06-07 | Yutani Heavy Ind Ltd | 建設機械の操作装置 |
| KR950002378A (ko) | 1993-06-17 | 1995-01-04 | 이헌조 | 양방향주사방식의 티브이 송수신시스템 |
| JP3009822B2 (ja) | 1994-05-16 | 2000-02-14 | 新キャタピラー三菱株式会社 | 建設機械のシリンダ制御回路 |
| DE19804398A1 (de) * | 1998-02-04 | 1999-08-05 | Linde Ag | Ventilanordnung für die Arbeitshydraulik eines Arbeitsfahrzeugs |
| US6675904B2 (en) * | 2001-12-20 | 2004-01-13 | Volvo Construction Equipment Holding Sweden Ab | Apparatus for controlling an amount of fluid for heavy construction equipment |
| US7302797B2 (en) * | 2005-05-31 | 2007-12-04 | Caterpillar Inc. | Hydraulic system having a post-pressure compensator |
| JP2007092789A (ja) * | 2005-09-27 | 2007-04-12 | Hitachi Constr Mach Co Ltd | 建設機械の油圧制御装置 |
| JP4933299B2 (ja) * | 2007-02-20 | 2012-05-16 | 東芝機械株式会社 | 建設機械の油圧制御装置 |
| WO2014017685A1 (ko) * | 2012-07-27 | 2014-01-30 | 볼보 컨스트럭션 이큅먼트 에이비 | 건설기계용 유압시스템 |
-
2018
- 2018-10-01 KR KR1020180116713A patent/KR20200037480A/ko not_active Ceased
-
2019
- 2019-09-27 WO PCT/KR2019/012585 patent/WO2020071690A1/ko not_active Ceased
- 2019-09-27 US US17/282,075 patent/US11313104B2/en active Active
- 2019-09-27 CN CN201980064464.XA patent/CN112789383A/zh active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116950950A (zh) * | 2023-07-20 | 2023-10-27 | 江苏汇智高端工程机械创新中心有限公司 | 一种流量独立再生控制结构、多路阀及工程机械 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11313104B2 (en) | 2022-04-26 |
| CN112789383A (zh) | 2021-05-11 |
| US20210324608A1 (en) | 2021-10-21 |
| WO2020071690A1 (ko) | 2020-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101088753B1 (ko) | 굴삭기용 유압구동 시스템 | |
| US9528531B2 (en) | Hydraulic drive apparatus for work machine | |
| JP5564215B2 (ja) | 建設機械用油圧システム | |
| US9080310B2 (en) | Closed-loop hydraulic system having regeneration configuration | |
| JP6200498B2 (ja) | 建設機械の油圧駆動装置 | |
| JPWO2005047709A1 (ja) | 建設機械の油圧制御装置 | |
| JP4193830B2 (ja) | 作業機械の油圧制御装置 | |
| KR20130085989A (ko) | 건설 기계 및 그 유압 회로 | |
| JP6730798B2 (ja) | 油圧駆動装置 | |
| JP6717541B2 (ja) | 弁装置およびこれを備えた流体圧システム | |
| JP2017115992A (ja) | 作業機の油圧システム | |
| JP2016156426A (ja) | アンロード弁および油圧ショベルの油圧駆動システム | |
| KR100797315B1 (ko) | 굴삭기의 주행 및 프론트작업의 복합작업용 유압제어장치 | |
| JP6082690B2 (ja) | 建設機械の油圧駆動装置 | |
| EP2602491A1 (en) | Construction machine comprising hydraulic circuit | |
| JP7121642B2 (ja) | 流体圧制御装置 | |
| KR102026550B1 (ko) | 유체압 제어 장치 | |
| JP2015110981A5 (ko) | ||
| CN109563695B (zh) | 挖土机、挖土机用控制阀门 | |
| JP2017025933A (ja) | 建設機械用油圧回路および建設機械 | |
| JP7026005B2 (ja) | 流体圧制御装置 | |
| CN111417759A (zh) | 流体压控制装置 | |
| KR20200037480A (ko) | 건설기계의 제어 시스템 | |
| KR101260072B1 (ko) | 굴삭기의 복합동작 제어용 유압제어시스템 | |
| KR102946030B1 (ko) | 유체 제어 장치, 건설 기계 및 유체 제어 장치의 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181001 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210928 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20181001 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230322 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230710 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20230322 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |