KR20200037657A - 냉장고, 서버 및 냉장고의 객체 인식 방법 - Google Patents
냉장고, 서버 및 냉장고의 객체 인식 방법 Download PDFInfo
- Publication number
- KR20200037657A KR20200037657A KR1020180117133A KR20180117133A KR20200037657A KR 20200037657 A KR20200037657 A KR 20200037657A KR 1020180117133 A KR1020180117133 A KR 1020180117133A KR 20180117133 A KR20180117133 A KR 20180117133A KR 20200037657 A KR20200037657 A KR 20200037657A
- Authority
- KR
- South Korea
- Prior art keywords
- change
- imaging direction
- feature points
- refrigerator
- captured image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D29/00—Arrangement or mounting of control or safety devices
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/254—Analysis of motion involving subtraction of images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/269—Analysis of motion using gradient-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/62—Analysis of geometric attributes of area, perimeter, diameter or volume
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/758—Involving statistics of pixels or of feature values, e.g. histogram matching
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D2500/00—Problems to be solved
- F25D2500/06—Stock management
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D2700/00—Means for sensing or measuring; Sensors therefor
- F25D2700/06—Sensors detecting the presence of a product
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30128—Food products
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Business, Economics & Management (AREA)
- Multimedia (AREA)
- General Engineering & Computer Science (AREA)
- Economics (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Mechanical Engineering (AREA)
- Thermal Sciences (AREA)
- Quality & Reliability (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Accounting & Taxation (AREA)
- General Business, Economics & Management (AREA)
- Tourism & Hospitality (AREA)
- Data Mining & Analysis (AREA)
- Finance (AREA)
- Strategic Management (AREA)
- Human Resources & Organizations (AREA)
- Development Economics (AREA)
- Marketing (AREA)
- Entrepreneurship & Innovation (AREA)
- Operations Research (AREA)
- Geometry (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Computational Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Signal Processing (AREA)
- Cold Air Circulating Systems And Constructional Details In Refrigerators (AREA)
Abstract
Description
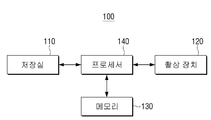
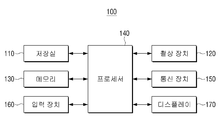
도 2는 본 개시의 일 실시 예에 따른 냉장고의 구체적인 구성을 도시한 블록도,
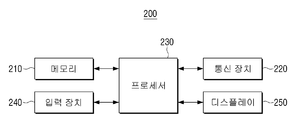
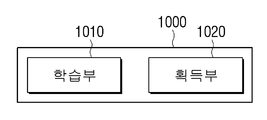
도 3은 본 개시의 일 실시 예에 따른 서버의 간단한 구성을 설명하기 위한 블록도,
도 4는 본 개시의 일 실시 예에 따른 서버의 구체적인 구성을 도시한 블록도,
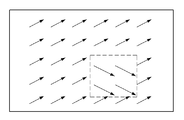
도 5는 본 개시의 일 실시 예에 따른 촬상 방향의 변화가 발생한 예를 도시한 도면,
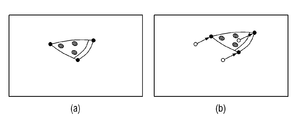
도 6 내지 도 9는 본 개시의 일 실시 예에 따른 이미지 내 복수의 특징점을 이용한 촬상 방향의 변화 확인 방법의 예를 도시한 도면,
도 10은 본 개시의 일 실시 예에 따른 인공 지능 모델을 이용한 촬상 방향의 변화 확인 방법의 예를 도시한 도면,
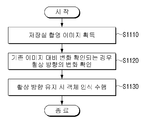
도 11은 본 개시의 일 실시 예에 따른 객체 인식 방법을 설명하기 위한 흐름도,
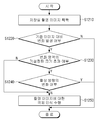
도 12는 본 개시의 일 실시 예에 따른 객체 인식 방법을 구체적으로 설명하기 위한 흐름도,
도 13은 제1 실시 예에 따른 냉장고 및 서버를 이용한 객체 인식 방법을 설명하기 위한 시퀀스도, 그리고,
도 14는 제2 실시 예에 따른 냉장고 및 서버를 이용한 객체 인식 방법을 설명하기 위한 시퀀스도이다.
120: 촬상 장치 130: 메모리
140: 프로세서 200: 서버
210: 메모리 220: 통신 장치
230: 프로세서
Claims (20)
- 냉장고의 객체 인식 방법에 있어서,
상기 냉장고의 저장실을 촬영한 촬영 이미지를 획득하는 단계;
기 저장된 기존 이미지에 비해 상기 촬영 이미지의 변화가 확인되면, 상기 저장실을 촬영한 촬상 장치의 촬상 방향의 변화를 확인하는 단계; 및
상기 촬상 방향이 유지된 상태이면 상기 촬영 이미지에 대한 객체 인식 동작을 수행하는 단계;를 포함하는 냉장고의 객체 인식 방법. - 제1항에 있어서,
상기 촬상 방향이 변화된 상태이면 상기 기존 이미지를 대체하여 상기 촬영 이미지를 저장하는 단계;를 더 포함하는 냉장고의 객체 인식 방법. - 제1항에 있어서,
상기 촬상 방향의 변화를 확인하는 단계는,
상기 기존 이미지와 상기 촬영 이미지 내의 각 픽셀들을 비교하여, 픽셀 값 변화 영역을 검출하는 단계; 및
상기 픽셀 값 변화 영역의 면적이 기 설정된 크기보다 크면, 상기 촬상 방향의 변화를 확인하는 단계;를 포함하는 냉장고의 객체 인식 방법. - 제3항에 있어서,
상기 촬상 방향의 변화를 확인하는 단계는,
상기 기존 이미지 내의 복수의 제1 특징점에 대응되는 복수의 제2 특징점을 상기 촬영 이미지로부터 검출하는 단계; 및
상기 복수의 제1 특징점 및 상기 복수의 제2 특징점 각각의 픽셀 좌표 값을 비교하여, 상기 복수의 제2 특징점의 이동 거리 및 이동 방향을 산출하고, 상기 산출한 이동 거리 및 이동 방향을 기초로 상기 촬상 방향의 변화를 확인하는 단계;를 포함하는 냉장고의 객체 인식 방법. - 제4항에 있어서,
상기 이동 거리 및 이동 방향을 기초로 상기 촬상 방향의 변화를 확인하는 단계는,
상기 복수의 제2 특징점의 이동 거리 및 이동 방향이 기 설정된 오차 범위 내에서 일치하면 상기 촬상 방향이 변화된 것으로 판단하고, 상기 복수의 제2 특징점 중 적어도 하나의 제2 특징점의 이동 거리 또는 이동 방향이 나머지 제2 특징점의 이동 거리 또는 이동 방향과 상기 기 설정된 오차 범위보다 상이하면 상기 촬상 방향이 유지된 것으로 판단하는, 냉장고의 객체 인식 방법. - 제4항에 있어서,
상기 촬상 방향의 변화를 확인하는 단계는,
상기 복수의 제2 특징점의 개수 및 상기 복수의 제1 특징점의 개수 간의 변화 비율이 기 설정된 임계 비율을 초과하면, 상기 촬상 방향이 유지된 것으로 판단하는, 냉장고의 객체 인식 방법. - 제1항에 있어서,
상기 촬상 방향의 변화를 확인하는 단계는,
상기 촬상 방향의 변화를 식별하도록 설정된 인공 지능 모델을 이용하여, 상기 촬상 방향의 변화를 확인하고,
상기 인공 지능 모델은,
CNN(Convolutional Neural Network), RNN(Recurrent Neural Network), CRNN(Convolutional Recurrent Neural Network) 중 적어도 하나인, 냉장고의 객체 인식 방법. - 냉장고에 있어서,
식품을 저장하기 위한 저장실;
상기 저장실을 촬상하기 위한 촬상 장치;
상기 촬상 장치에서 기 촬상한 기존 이미지를 저장하는 메모리; 및
상기 촬상 장치를 제어하여 상기 저장실을 촬상하여 촬영 이미지를 획득하고, 상기 기존 이미지에 비해 상기 촬영 이미지의 변화가 확인되면 상기 촬상 장치의 촬상 방향의 변화 여부를 확인하고, 상기 촬상 방향이 유지된 상태이면 상기 촬영 이미지에 대한 객체 인식 동작을 수행하는 프로세서;를 포함하는 냉장고.
- 제8항에 있어서,
상기 프로세서는,
상기 촬상 방향이 변화된 상태이면 상기 기존 이미지를 대체하여 상기 촬영 이미지를 상기 메모리에 저장하는 냉장고. - 제8항에 있어서,
상기 프로세서는,
상기 기존 이미지와 상기 촬영 이미지 내의 각 픽셀들을 비교하여 픽셀 값 변화 영역을 검출하고, 상기 픽셀 값 변화 영역의 면적이 기 설정된 크기보다 크면 상기 촬상 방향의 변화를 확인하는 냉장고. - 제10항에 있어서,
상기 프로세서는,
상기 기존 이미지 내의 복수의 제1 특징점에 대응되는 복수의 제2 특징점을 상기 촬영 이미지로부터 검출하고, 상기 복수의 제1 특징점 및 상기 복수의 제2 특징점 각각의 픽셀의 좌표 값을 비교하여, 상기 복수의 제2 특징점의 이동 거리 및 이동 방향을 산출하고, 상기 산출한 이동 거리 및 이동 방향을 기초로 상기 촬상 방향의 변화를 확인하는 냉장고. - 제11항에 있어서,
상기 복수의 제2 특징점의 이동 거리 및 이동 방향이 기 설정된 오차 범위 내에서 일치하면 상기 촬상 방향이 변화된 것으로 판단하고, 상기 복수의 제2 특징점 중 적어도 하나의 제2 특징점의 이동 거리 또는 이동 방향이 나머지 제2 특징점의 이동 거리 또는 이동 방향과 상기 기설정된 오차 범위보다 상이하면 상기 촬상 방향이 유지된 것으로 판단하는 냉장고. - 제11항에 있어서,
상기 프로세서는,
상기 복수의 제2 특징점의 개수 및 상기 복수의 제1 특징점의 개수 간의 변화 비율이 기 설정된 임계 비율을 초과하면, 상기 촬상 방향이 유지된 것으로 판단하는 냉장고. - 제8항에 있어서,
상기 프로세서는,
상기 촬상 방향의 변화를 식별하도록 설정된 인공 지능 모델을 이용하여 촬상 방향의 변화를 확인하고,
상기 인공 지능 모델은,
CNN(Convolutional Neural Network), RNN(Recurrent Neural Network), CRNN(Convolutional Recurrent Neural Network) 중 적어도 하나인 냉장고. - 서버에 있어서,
냉장고의 저장실을 촬상한 기존 이미지를 저장하는 메모리;
상기 냉장고로부터 상기 냉장고의 저장실을 촬상한 촬영 이미지를 수신하는 통신 장치; 및
상기 기존 이미지에 비해 상기 촬영 이미지의 변화가 확인되면 상기 촬영 이미지의 촬상 방향의 변화 여부를 확인하고, 상기 촬상 방향이 유지된 상태이면 상기 촬영 이미지에 대한 객체 인식 동작을 수행하는 프로세서;를 포함하는 서버. - 제15항에 있어서,
상기 프로세서는,
상기 기존 이미지와 상기 촬영 이미지 내의 각 픽셀들을 비교하여 픽셀 값 변화 영역을 검출하고, 상기 픽셀 값 변화 영역의 면적이 기 설정된 크기보다 크면 상기 촬상 방향의 변화를 확인하는 서버. - 제16항에 있어서,
상기 프로세서는,
상기 기존 이미지 내의 복수의 제1 특징점에 대응되는 복수의 제2 특징점을 상기 촬영 이미지로부터 검출하고, 상기 복수의 제1 특징점 및 상기 복수의 제2 특징점 각각의 픽셀의 좌표 값을 비교하여, 상기 복수의 제2 특징점의 이동 거리 및 이동 방향을 산출하고, 상기 산출한 이동 거리 및 이동 방향을 기초로 상기 촬상 방향의 변화를 확인하는 서버. - 제17항에 있어서,
상기 프로세서는,
상기 복수의 제2 특징점의 이동 거리 및 이동 방향이 기 설정된 오차 범위 내에서 일치하면 상기 촬상 방향이 변화된 것으로 판단하고, 상기 복수의 제2 특징점 중 적어도 하나의 제2 특징점의 이동 거리 또는 이동 방향이 나머지 제2 특징점의 이동 거리 또는 이동 방향과 상기 기설정된 오차 범위보다 상이하면 상기 촬상 방향이 유지된 것으로 판단하는 서버. - 제17항에 있어서,
상기 프로세서는,
상기 복수의 제2 특징점의 개수 및 상기 복수의 제1 특징점의 개수 간의 변화 비율이 기 설정된 임계 비율을 초과하면, 상기 촬상 방향이 유지된 것으로 판단하는 서버. - 제15항에 있어서,
상기 프로세서는,
상기 촬상 방향의 변화를 식별하도록 설정된 인공 지능 모델을 이용하여 촬상 방향의 변화를 확인하고,
상기 인공 지능 모델은,
CNN(Convolutional Neural Network), RNN(Recurrent Neural Network), CRNN(Convolutional Recurrent Neural Network) 중 적어도 하나인 서버.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180117133A KR102766407B1 (ko) | 2018-10-01 | 2018-10-01 | 냉장고, 서버 및 냉장고의 객체 인식 방법 |
| CN201980064087.XA CN112789652B (zh) | 2018-10-01 | 2019-09-27 | 冰箱、服务器和冰箱的对象识别方法 |
| US17/268,009 US11594019B2 (en) | 2018-10-01 | 2019-09-27 | Refrigerator, server, and object recognition method of refrigerator |
| EP19869916.7A EP3806033B1 (en) | 2018-10-01 | 2019-09-27 | Refrigerator, server, and object recognition method of refrigerator |
| PCT/KR2019/012645 WO2020071692A1 (ko) | 2018-10-01 | 2019-09-27 | 냉장고, 서버 및 냉장고의 객체 인식 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180117133A KR102766407B1 (ko) | 2018-10-01 | 2018-10-01 | 냉장고, 서버 및 냉장고의 객체 인식 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200037657A true KR20200037657A (ko) | 2020-04-09 |
| KR102766407B1 KR102766407B1 (ko) | 2025-02-13 |
Family
ID=70055570
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180117133A Active KR102766407B1 (ko) | 2018-10-01 | 2018-10-01 | 냉장고, 서버 및 냉장고의 객체 인식 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11594019B2 (ko) |
| EP (1) | EP3806033B1 (ko) |
| KR (1) | KR102766407B1 (ko) |
| CN (1) | CN112789652B (ko) |
| WO (1) | WO2020071692A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230058462A (ko) | 2020-08-31 | 2023-05-03 | 닛토덴코 가부시키가이샤 | 점착 시트 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12392548B2 (en) | 2023-09-29 | 2025-08-19 | Springhouse Technologies Inc. | System and method for tracking refrigerator inventory |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20060070969A (ko) * | 2004-12-21 | 2006-06-26 | 삼성전자주식회사 | 비디오 감시 시스템에서 카메라/물체 움직임 구분 및 객체추출 장치 및 그 방법 |
| JP2017097770A (ja) * | 2015-11-27 | 2017-06-01 | 富士通株式会社 | カメラ位置姿勢推定装置、カメラ位置姿勢推定方法およびカメラ位置姿勢推定プログラム |
| US20180172343A1 (en) * | 2015-06-15 | 2018-06-21 | Bsh Hausgeraete Gmbh | Method for operating a household appliance, corresponding household appliance and system with a household appliance |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100415313B1 (ko) * | 2001-12-24 | 2004-01-16 | 한국전자통신연구원 | 동영상에서 상관 정합과 시스템 모델을 이용한 광류와카메라 움직임 산출 장치 |
| KR100479616B1 (ko) | 2002-03-09 | 2005-03-30 | 엘지전자 주식회사 | 냉장고내 정보 취득 장치 및 방법 |
| CN103109522B (zh) * | 2010-11-16 | 2016-05-11 | 本田技研工业株式会社 | 车载摄像头位置变化量检测装置 |
| KR101318652B1 (ko) * | 2011-12-14 | 2013-10-16 | 현대자동차주식회사 | 차량의 움직임 감지방법 |
| WO2014168265A1 (ko) | 2013-04-10 | 2014-10-16 | 엘지전자 주식회사 | 영상 인식을 이용한 냉장고의 보관 품목 관리 방법 및 그 냉장고 |
| JP6296908B2 (ja) | 2014-06-09 | 2018-03-20 | 三菱電機株式会社 | 冷蔵庫及びネットワークシステム |
| KR20170027246A (ko) * | 2015-09-01 | 2017-03-09 | 삼성전자주식회사 | 냉장고 |
| KR101697520B1 (ko) * | 2015-11-05 | 2017-02-02 | 경북대학교 산학협력단 | 촬영영상에서의 움직임 객체 검출 방법 및 이를 이용한 차량 승하차 사고 예방 시스템 |
| KR20170086165A (ko) * | 2016-01-15 | 2017-07-26 | 에스케이텔레콤 주식회사 | 영상 내 특징점의 움직임 검출 장치 및 방법 |
| US9784497B2 (en) | 2016-02-03 | 2017-10-10 | Multimedia Image Solution Limited | Smart refrigerator |
| CN105823778A (zh) * | 2016-03-10 | 2016-08-03 | 北京京东尚科信息技术有限公司 | 物品识别方法、装置及系统 |
| CN107527060B (zh) * | 2016-06-20 | 2022-01-25 | 青岛海尔智能技术研发有限公司 | 一种冷藏装置存储物管理系统和冷藏装置 |
| KR101756620B1 (ko) * | 2017-02-03 | 2017-07-12 | 구영모 | 냉장고의 문자판독 인공지능에 의한 보관식품 유통기한 알림장치와 그 방법 |
| KR102217024B1 (ko) | 2018-03-13 | 2021-02-19 | 삼성전자주식회사 | 냉장고, 그 제어 방법 및 시스템 |
| US11009941B2 (en) * | 2018-07-25 | 2021-05-18 | Finch Technologies Ltd. | Calibration of measurement units in alignment with a skeleton model to control a computer system |
-
2018
- 2018-10-01 KR KR1020180117133A patent/KR102766407B1/ko active Active
-
2019
- 2019-09-27 US US17/268,009 patent/US11594019B2/en active Active
- 2019-09-27 WO PCT/KR2019/012645 patent/WO2020071692A1/ko not_active Ceased
- 2019-09-27 EP EP19869916.7A patent/EP3806033B1/en active Active
- 2019-09-27 CN CN201980064087.XA patent/CN112789652B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20060070969A (ko) * | 2004-12-21 | 2006-06-26 | 삼성전자주식회사 | 비디오 감시 시스템에서 카메라/물체 움직임 구분 및 객체추출 장치 및 그 방법 |
| US20180172343A1 (en) * | 2015-06-15 | 2018-06-21 | Bsh Hausgeraete Gmbh | Method for operating a household appliance, corresponding household appliance and system with a household appliance |
| JP2017097770A (ja) * | 2015-11-27 | 2017-06-01 | 富士通株式会社 | カメラ位置姿勢推定装置、カメラ位置姿勢推定方法およびカメラ位置姿勢推定プログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230058462A (ko) | 2020-08-31 | 2023-05-03 | 닛토덴코 가부시키가이샤 | 점착 시트 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020071692A1 (ko) | 2020-04-09 |
| EP3806033C0 (en) | 2024-05-01 |
| CN112789652B (zh) | 2025-02-28 |
| CN112789652A (zh) | 2021-05-11 |
| US20210209363A1 (en) | 2021-07-08 |
| EP3806033A1 (en) | 2021-04-14 |
| US11594019B2 (en) | 2023-02-28 |
| EP3806033B1 (en) | 2024-05-01 |
| KR102766407B1 (ko) | 2025-02-13 |
| EP3806033A4 (en) | 2021-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20240419256A1 (en) | Determining a primary control mode of controlling an electronic device using 3d gestures or using control manipulations from a user manipulable input device | |
| US9373087B2 (en) | Decision tree training in machine learning | |
| RU2648573C2 (ru) | Выделение ресурсов для машинного обучения | |
| US11308348B2 (en) | Methods and systems for processing image data | |
| US20180211104A1 (en) | Method and device for target tracking | |
| US12298879B2 (en) | Electronic device and method for controlling same | |
| CN105051755A (zh) | 用于姿势识别的部位和状态检测 | |
| WO2018112496A1 (en) | Tree structured crf with unary potential function using action unit features of other segments as context feature | |
| US12267482B2 (en) | Controlling and editing presentation of volumetric content | |
| WO2022159200A1 (en) | Action recognition using pose data and machine learning | |
| KR20200037657A (ko) | 냉장고, 서버 및 냉장고의 객체 인식 방법 | |
| WO2026030474A1 (en) | Hand touch detection using images | |
| JP6744536B1 (ja) | 目線撮像方法及び目線撮像システム | |
| US20260073643A1 (en) | Rendering-based ipd adaptation | |
| KR102369151B1 (ko) | 동작 인식을 위한 메타 데이터 생성 시스템 및 생성 방법 | |
| Giusti | An approach based on Siamese networks for the recognition of human operations in collaborative robotic tasks | |
| Ballester Ripoll | Gesture recognition using a depth sensor and machine learning techniques | |
| Ripoll | Gesture recognition using a depth sensor and machine learning techniques | |
| CN114792441A (zh) | 动作识别方法、装置、电子设备及计算机可读存储介质 | |
| Pannase et al. | To Analyze Hand Gesture Recognition For Wirelessly Electronic Device Control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181001 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210924 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20181001 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20240416 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20241216 |
|
| PG1601 | Publication of registration |