KR20200039036A - 센서 적합형 액티브 범퍼 및 자율주행차량 - Google Patents
센서 적합형 액티브 범퍼 및 자율주행차량 Download PDFInfo
- Publication number
- KR20200039036A KR20200039036A KR1020180115757A KR20180115757A KR20200039036A KR 20200039036 A KR20200039036 A KR 20200039036A KR 1020180115757 A KR1020180115757 A KR 1020180115757A KR 20180115757 A KR20180115757 A KR 20180115757A KR 20200039036 A KR20200039036 A KR 20200039036A
- Authority
- KR
- South Korea
- Prior art keywords
- flap
- bumper
- sensor
- multiple flaps
- cover hole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 230000005856 abnormality Effects 0.000 claims description 6
- 238000004891 communication Methods 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 claims description 4
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 238000011109 contamination Methods 0.000 abstract description 5
- 238000001514 detection method Methods 0.000 description 4
- 230000000903 blocking effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000007613 environmental effect Effects 0.000 description 3
- 230000002411 adverse Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R19/00—Wheel guards; Radiator guards, e.g. grilles; Obstruction removers; Fittings damping bouncing force in collisions
- B60R19/02—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects
- B60R19/48—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects combined with, or convertible into, other devices or objects, e.g. bumpers combined with road brushes, bumpers convertible into beds
- B60R19/483—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects combined with, or convertible into, other devices or objects, e.g. bumpers combined with road brushes, bumpers convertible into beds with obstacle sensors of electric or electronic type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
- B60W2050/0215—Sensor drifts or sensor failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B60W2420/52—
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Human Computer Interaction (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
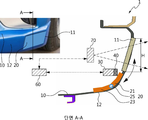
11 : 센서커버 홀 20 : 다중 플랩
21 : 어퍼 플랩 21a.21b,22a.23b : 제1,2,3,4 플랩
23 : 로어 플랩 25 : 플랩 힌지
25a.25b,25c : 제1,2,3플랩 힌지
30 : 액추에이터 31 : 연결 보스
40 : 플랩 로드 41 : 연결 엔드
50 : 가이드 하우징 51 : 가이드 레일
60 : 컨트롤러 70 : 3D 물체인식센서
80 : 회전부재 81 : 피니언
83 : 랙크
100 : 자율주행차량 110 : 차량탑재센서
120 : 배터리 130 : 클러스터 윈도우
140 : EMS(Engine Management System)
200 : 프론트 센서 유닛 201 : 프론트 범퍼
210,310 : 측방 라이다(LiDAR)
220,320 : 측방 레이더 230 : 전방 레이더
300 : 리어 센서 유닛 301 : 리어 범퍼
Claims (18)
- 센서 조사광의 송수신 영역을 위한 개방공간이 센서커버 홀로 뚫려진 범퍼커버,
굴절 구조로 상기 센서커버 홀에 위치된 다중 플랩,
상기 센서커버 홀의 열림과 닫힘을 위해 상기 다중 플랩을 이동시켜주는 플랩회동부재
가 포함되는 것을 특징으로 하는 액티브 범퍼.
- 청구항 1에 있어서, 상기 범퍼커버는 내부공간을 형성하여 상기 다중 플랩과 상기 플랩회동부재를 위치시켜주는 것을 특징으로 하는 액티브 범퍼.
- 청구항 1에 있어서, 상기 범퍼커버는 상기 센서커버 홀의 주변부를 곡률형상부로 형성시켜주는 것을 특징으로 하는 액티브 범퍼.
- 청구항 3에 있어서, 상기 곡률형상부는 상기 다중 플랩의 이동경로를 형성해주는 것을 특징으로 하는 액티브 범퍼.
- 청구항 1에 있어서, 상기 다중 플랩은 플랩 힌지로 연결된 어퍼 플랩과 로어 플랩로 상기 굴절 구조를 형성하는 것을 특징으로 하는 액티브 범퍼.
- 청구항 5에 있어서, 상기 어퍼 플랩과 상기 로어 플랩의 각각은 상기 플랩 힌지로 연결된 2개 이상의 플랩으로 나눠지는 것을 특징으로 하는 액티브 범퍼.
- 청구항 1에 있어서, 상기 플랩회동부재는 상기 센서커버 홀의 아래쪽부위나 위쪽부위에서 상기 다중 플랩과 연계되는 것을 특징으로 하는 액티브 범퍼.
- 청구항 7에 있어서, 상기 플랩회동부재는 상기 다중 플랩의 이동을 위한 동력이 발생되는 액추에이터, 상기 액추에이터와 연결되어 상기 동력으로 회전되는 플랩 로드, 상기 플랩 로드의 회전을 전달받아 직선이동으로 전환하여 상기 센서커버 홀의 열림과 닫힘을 위한 상기 다중 플랩에 이동력을 발생시켜주는 회전부재로 구성되는 것을 특징으로 하는 액티브 범퍼.
- 청구항 8에 있어서, 상기 액추에이터와 상기 플랩 로드의 연결은 스플라인 결합으로 이루어지는 것을 특징으로 하는 액티브 범퍼.
- 청구항 8에 있어서, 상기 회전부재는 가이드 하우징에 위치되고, 상기 가이드 하우징은 상기 다중 플랩의 좌우 양쪽과 결합되어 상기 다중 플랩의 위치를 잡아주는 것을 특징으로 하는 액티브 범퍼.
- 청구항 8에 있어서, 상기 가이드 하우징은 가이드 레일을 형성하고, 상기 가이드 레일에는 상기 다중 플랩의 부분과 상기 회전부재가 위치되는 것을 특징으로 하는 액티브 범퍼.
- 청구항 8에 있어서, 상기 액추에이터는 컨트롤러와 연계되고, 상기 컨트롤러는 상기 다중 플랩의 열림과 닫힘에 따라 상기 액추에이터의 동력 방향을 제어해 주는 것을 특징으로 하는 액티브 범퍼.
- 청구항 1에 있어서, 상기 센서 조사광의 발생 수단은 3D 물체인식센서(70)인 것을 특징으로 하는 액티브 범퍼.
- 센서커버 홀 주위로 곡률형상부를 형성한 범퍼커버, 상기 범퍼커버의 안쪽에 형성된 가이드 하우징과 결합된 상태에서 굴절 구조에 의한 이동으로 상기 센서커버 홀을 열거나 닫아주는 다중 플랩, 액추에이터와 연결된 플랩 로드의 회전을 상기 다중 플랩의 이동력으로 전환시키는 회전부재로 이루어진 플랩회동부재를 구성요소로 하는 액티브 범퍼;
상기 액추에이터를 제어하여 상기 다중 플랩을 이동시켜주는 EMS(Engine Management System);
레이더와 라이더를 구성요소로 하는 차량 전방의 프론트 센서 유닛;
이 포함되는 것을 특징으로 하는 자율주행차량.
- 청구항 14에 있어서, 상기 EMS는 상기 센서커버 홀의 열림과 닫힘을 주행조건과 도로환경 및 시스템 상태로 판단하여 주는 것을 특징으로 하는 자율주행차량.
- 청구항 15에 있어서, 상기 주행조건은 상기 센서커버 홀을 닫아주는 주차 또는 정차를 포함하고, 상기 도로환경은 상기 센서커버 홀을 닫아주는 험로 또는 악천후를 포함하며, 상기 시스템 상태는 상기 센서커버 홀을 닫아주는 자율주행 관련 통신 및 센서 이상 또는 상기 액추에이터의 고장 및 단선/단락을 포함하는 것을 특징으로 하는 자율주행차량.
- 청구항 14에 있어서, 상기 EMS는 상기 액티브 범퍼의 고장을 클러스터 윈도우로 경고하여 주는 것을 특징으로 하는 자율주행차량.
- 청구항 14에 있어서, 상기 라이더는 상기 센서커버 홀을 송수신 영역으로 하여 센서 조사광을 상기 액티브 범퍼의 외부로 내보내주는 것을 특징으로 하는 자율주행차량.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180115757A KR20200039036A (ko) | 2018-09-28 | 2018-09-28 | 센서 적합형 액티브 범퍼 및 자율주행차량 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180115757A KR20200039036A (ko) | 2018-09-28 | 2018-09-28 | 센서 적합형 액티브 범퍼 및 자율주행차량 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200039036A true KR20200039036A (ko) | 2020-04-16 |
Family
ID=70454747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180115757A Ceased KR20200039036A (ko) | 2018-09-28 | 2018-09-28 | 센서 적합형 액티브 범퍼 및 자율주행차량 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200039036A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113203996A (zh) * | 2021-04-29 | 2021-08-03 | 纵目科技(上海)股份有限公司 | 保险杠对毫米波雷达性能影响的测试方法及其装置与系统 |
| KR20210153285A (ko) * | 2020-06-10 | 2021-12-17 | 현대자동차주식회사 | 액티브 공력가변장치 및 차량 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160050957A (ko) | 2014-10-31 | 2016-05-11 | 현대모비스 주식회사 | 자율주행용 센서 키트 및 이를 구비하는 자율주행차량 |
-
2018
- 2018-09-28 KR KR1020180115757A patent/KR20200039036A/ko not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160050957A (ko) | 2014-10-31 | 2016-05-11 | 현대모비스 주식회사 | 자율주행용 센서 키트 및 이를 구비하는 자율주행차량 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210153285A (ko) * | 2020-06-10 | 2021-12-17 | 현대자동차주식회사 | 액티브 공력가변장치 및 차량 |
| CN113203996A (zh) * | 2021-04-29 | 2021-08-03 | 纵目科技(上海)股份有限公司 | 保险杠对毫米波雷达性能影响的测试方法及其装置与系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102779091B1 (ko) | 센서 클러스터장치 | |
| US20230146876A1 (en) | Sensor Module for Being Attached to a Panel Component of a Motor Vehicle and Panel Component Comprising Such a Sensor Module | |
| US10308295B2 (en) | Integrated spoiler CHMSL optical sensor system | |
| US12246651B2 (en) | Sensor module for being mounted on a panel component of a motor vehicle and panel component comprising such a sensor module | |
| JP6734337B2 (ja) | 車体前部構造 | |
| KR101714252B1 (ko) | 차량용 액티브 에어스커트 장치 | |
| CN117980169A (zh) | 安装在面板构件上的导流装置 | |
| US20160306030A1 (en) | Arrangement structure for peripheral information detection sensor and self-driving vehicle | |
| US20160297482A1 (en) | Vehicle upper portion structure | |
| US20210254387A1 (en) | Door device having movable sensor component for environment detection and method for environment detection at a door device | |
| US11417112B2 (en) | Object sensing apparatus | |
| US12415464B2 (en) | Roof module for forming a vehicle roof having a rotatable environment sensor | |
| KR20200039036A (ko) | 센서 적합형 액티브 범퍼 및 자율주행차량 | |
| KR20170034964A (ko) | 차량의 공력성능 개선장치 | |
| US20220063656A1 (en) | Moving body | |
| US20220063509A1 (en) | Moving body | |
| JP4472744B2 (ja) | ワイパ装置 | |
| WO2021039626A1 (ja) | 車載ネットワークシステム | |
| CN113581171B (zh) | 一种自动驾驶方法、系统、可读存储介质及车辆 | |
| US10583866B2 (en) | Work vehicle | |
| US20180297451A1 (en) | Wind buffeting system for a vehicle | |
| GB2493909A (en) | A vehicle with deployable sensor apparatus for determining wading depth | |
| KR20200050191A (ko) | Adas 연계 상시 작동 액티브 후드 장치 | |
| JP2004249872A (ja) | リフトアップフード | |
| US20240190360A1 (en) | Roof module comprising a roof opening system and a sensor module |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180928 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210818 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20180928 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20221115 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230522 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20221115 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |