KR20200042506A - 보어 홀의 깊이를 측정하기 위한 외과용 핸드피스 및 관련 부속품 - Google Patents
보어 홀의 깊이를 측정하기 위한 외과용 핸드피스 및 관련 부속품 Download PDFInfo
- Publication number
- KR20200042506A KR20200042506A KR1020207007654A KR20207007654A KR20200042506A KR 20200042506 A KR20200042506 A KR 20200042506A KR 1020207007654 A KR1020207007654 A KR 1020207007654A KR 20207007654 A KR20207007654 A KR 20207007654A KR 20200042506 A KR20200042506 A KR 20200042506A
- Authority
- KR
- South Korea
- Prior art keywords
- cannula
- assembly
- drill bit
- handpiece
- measurement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000005259 measurement Methods 0.000 claims description 363
- 238000000034 method Methods 0.000 claims description 55
- 238000005520 cutting process Methods 0.000 claims description 54
- 230000001012 protector Effects 0.000 claims description 52
- 239000012636 effector Substances 0.000 claims description 48
- 230000033001 locomotion Effects 0.000 claims description 36
- 230000004044 response Effects 0.000 claims description 30
- 238000003780 insertion Methods 0.000 claims description 26
- 230000037431 insertion Effects 0.000 claims description 26
- 238000006073 displacement reaction Methods 0.000 claims description 24
- 230000014759 maintenance of location Effects 0.000 claims description 24
- 230000006870 function Effects 0.000 claims description 21
- 230000007246 mechanism Effects 0.000 claims description 17
- 238000004891 communication Methods 0.000 claims description 10
- 238000001356 surgical procedure Methods 0.000 claims description 8
- 230000008054 signal transmission Effects 0.000 claims description 7
- 230000000295 complement effect Effects 0.000 claims description 6
- 230000007704 transition Effects 0.000 claims description 5
- 239000003302 ferromagnetic material Substances 0.000 claims description 3
- 239000011435 rock Substances 0.000 claims 1
- 229910052709 silver Inorganic materials 0.000 claims 1
- 239000004332 silver Substances 0.000 claims 1
- 238000004140 cleaning Methods 0.000 description 14
- 238000001514 detection method Methods 0.000 description 13
- 230000001954 sterilising effect Effects 0.000 description 11
- 238000005406 washing Methods 0.000 description 11
- 230000008569 process Effects 0.000 description 9
- 210000001519 tissue Anatomy 0.000 description 9
- 230000008901 benefit Effects 0.000 description 8
- 238000005553 drilling Methods 0.000 description 8
- 230000008878 coupling Effects 0.000 description 6
- 238000010168 coupling process Methods 0.000 description 6
- 238000005859 coupling reaction Methods 0.000 description 6
- 238000012958 reprocessing Methods 0.000 description 5
- 239000012620 biological material Substances 0.000 description 4
- 238000010276 construction Methods 0.000 description 4
- 238000004659 sterilization and disinfection Methods 0.000 description 4
- 238000003466 welding Methods 0.000 description 4
- 210000000988 bone and bone Anatomy 0.000 description 3
- 230000000717 retained effect Effects 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 102000004190 Enzymes Human genes 0.000 description 2
- 108090000790 Enzymes Proteins 0.000 description 2
- IAYPIBMASNFSPL-UHFFFAOYSA-N Ethylene oxide Chemical compound C1CO1 IAYPIBMASNFSPL-UHFFFAOYSA-N 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 230000001788 irregular Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000035515 penetration Effects 0.000 description 2
- 238000005381 potential energy Methods 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 238000005476 soldering Methods 0.000 description 2
- 238000004506 ultrasonic cleaning Methods 0.000 description 2
- 208000025978 Athletic injury Diseases 0.000 description 1
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 241000283984 Rodentia Species 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000000844 anti-bacterial effect Effects 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000005291 magnetic effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000003278 mimic effect Effects 0.000 description 1
- 208000015122 neurodegenerative disease Diseases 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images












































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/162—Chucks or tool parts which are to be held in a chuck
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1615—Drill bits, i.e. rotating tools extending from a handpiece to contact the worked material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1622—Drill handpieces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1631—Special drive shafts, e.g. flexible shafts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1637—Hollow drills or saws producing a curved cut, e.g. cylindrical
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/14—Surgical saws
- A61B17/142—Surgical saws with reciprocating saw blades, e.g. with cutting edges at the distal end of the saw blades
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1622—Drill handpieces
- A61B17/1624—Drive mechanisms therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1626—Control means; Display units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1628—Motors; Power supplies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1633—Sleeves, i.e. non-rotating parts surrounding the bit shaft, e.g. the sleeve forming a single unit with the bit shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1697—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans specially adapted for wire insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B2017/1602—Mills
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/062—Measuring instruments not otherwise provided for penetration depth
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Dentistry (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Pathology (AREA)
- Surgical Instruments (AREA)
- Dental Tools And Instruments Or Auxiliary Dental Instruments (AREA)
- Length-Measuring Instruments Using Mechanical Means (AREA)
Abstract
Description
도 2는 도 1의 외과용 핸드피스 시스템의 부분 분해 사시도이며, 이때 도시한 외과용 핸드피스 시스템은 측정 모듈, 구동 캐뉼라(drive cannula), 및 핸드피스 하우징 조립체로부터 이격된 릴리스 조립체를 가지며, 엔드 이펙터 조립체(end effector assembly)가 외과용 핸드피스 조립체로부터 제거되며 팁 프로텍터가 드릴 비트의 원위 절단 팁 부분으로부터 이격되어 도시된다.
도 3은, 도 1 및 도 2의 외과용 핸드피스 조립체의 일부분들의 부분 분해 사시도이며, 구동 캐뉼라 및 릴리스 조립체가 액추에이터 조립체를 도시하는 핸드피스 하우징 조립체의 일점쇄선 윤곽으로부터 이격되게 도시된다.
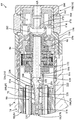
도 4는 도 1의 선(4-4)을 따라 취한 부분 등각 단면도이다.
도 5는 도 4의 표시 5에서 취한 확대 상세도이다.
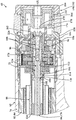
도 6은 도 1 내지 도 5의 외과용 핸드피스 조립체를 통해 길이 방향으로 취한 단면도이며, 이때 엔드 이펙터 조립체는 외과용 핸드피스 조립체로부터 제거된다.
도 7a는 도 6의 표시 7에서 취한 확대 상세도이며, 핸드피스 하우징 조립체 내의 측정 모듈, 구동 캐뉼라, 릴리스 조립체 및 액추에이터 조립체의 일부분들을 도시하여 도시되고 있다.
도 7b는 도 1 및 도 7a의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 이때 탄성 아암 쌍이 구동 캐뉼라의 근위 부분에 접근하는 드릴 비트의 근위 단부에 배치되게 도시되어 있다.
도 7c는 도 7a 및 도 7b의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 이때 드릴 비트의 탄성 아암은 구동 캐뉼라의 근위 부분의 시트 표면에 대항하여 맞물리며 서로를 향해 편향되게 도시되어 있다.
도 7d는 도 7a 내지 도 7c의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 이때 드릴 비트의 탄성 아암은 구동 캐뉼라의 근위 부분의 보어 내에 배열되며, 도시한 드릴 비트는, 탄성 아암이 연장되어 나오는 근위 단부를 가진 섕크(shank), 섕크에 결합되는 멈춤부(stop), 및 섕크에 결합되며 멈춤부와 근위 단부 사이에 개삽되는 인터페이스를 갖게 도시되어 있다.
도 7e는 도 7a 내지 도 7d의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 드릴 비트의 탄성 아암은 또한 구동 캐뉼라의 근위 부분의 보어 내에 배열되며, 드릴 비트의 인터페이스는 시트 표면에 인접한 구동 캐뉼라의 근위 부분의 보어 내에 위치지정되게 도시되어 있다.
도 7f는 도 7a 내지 도 7e의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 이때 드릴 비트의 탄성 아암은 서로로부터 탄성적으로 멀리 편행되며, 각각의 탄성 아암은 구동 캐뉼라의 근위 부분의 잠금 표면에 접한(abutting) 보유 표면을 갖게 도시되며, 드릴 비트의 멈춤부는 구동 캐뉼라의 근위 부분의 시트 표면에 접하여 보어 내에 인터페이스를 보유하게 도시되어 있다.
도 7g는 도 7a 내지 도 7f의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 이때 릴리스 조립체의 릴리스 부재가 탄성 아암에 대항하여 맞물리며 탄성 아암을 서로를 향해 편향시켜, 탄성 아암의 보유 표면을 구동 캐뉼라의 근위 부분의 잠금 표면과 접하지 않게(out of abutment) 움직이는 것을 용이하게 하게 도시되어 있다.
도 7h는 도 7a 내지 도 7g의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 이때 릴리스 조립체의 릴리스 부재는 탄성 아암에 대항하여 또한 맞물리며 탄성 아암을 편향시키며, 보유 표면은 구동 캐뉼라의 근위 부분의 잠금 표면과 접하지 않게 되게 도시되어 있다.
도 7i는 도 7a 내지 도 7h의 외과용 핸드피스 시스템의 다른 확대 상세도이며, 이때 릴리스 조립체의 릴리스 부재는 탄성 아암과 맞물리지 않게 도시되어 있으며, 탄성 아암은, 잠금 표면에 인접하며 그와 접촉하지 않는 구동 캐뉼라의 근위 부분의 보어 내에 배열되게 도시되어 있다.
도 8은 도 2 내지 도 7i의 구동 캐뉼라의 분해 사시도이다.
도 9는 도 3 내지 도 7i의 액추에이터 조립체의 부분 분해도이며, 구동 기어를 가진 모터와 출력 허브를 가진 기어셋을 갖게 도시되어 있다.
도 10은 도 9의 기어셋의 분해 사시도이다.
도 11은 도 9 및 도 10의 기어셋의 다른 분해 사시도이다.
도 12는 도 1 내지 도 7i의 릴리스 조립체의 부분 분해도이며, 키퍼(keeper) 본체와 하우징 어댑터로부터 이격된 릴리스 부조립체를 갖게 도시되어 있다.
도 13은 도 12의 릴리스 부조립체의 분해 사시도이다.
도 14는 도 12 및 도 13의 릴리스 부조립체의 다른 분해 사시도이다.
도 15a는, 도 3 내지 도 7i 및 도 9 내지 도 11에 도시된 기어셋의 출력 허브에 인접하게 위치지정되는 도 2 내지 도 8에 도시된 구동 캐뉼라의 근위 부분을 도시하는 사시도이다.
도 15b는, 스플라인(spline) 맞물림을 통한 동시 회전을 위해 조립되며, 도 1, 도 2, 도 4, 도 5 및 도 7b 내지 도 7i의 드릴 비트의 섕크의 근위 단부로부터 연장하는 탄성 아암에 인접하게 위치지정되게 도시되는 도 15a의 출력 허브와 구동 캐뉼라의 근위 부분의 사시도이다.
도 15c는, 도 15b의 드릴 비트, 구동 캐뉼라의 근위 부분 및 출력 허브의 다른 사시도이며, 드릴 비트의 탄성 아암은 구동 캐뉼라의 근위 부분의 잠금 표면과 접하게 배열되게 도시되어 있다.
도 15d는, 다른 출력 허브에 인접하게 위치지정되는 구동 캐뉼라의 다른 근위 부분의 사시도이다.
도 16은, 도 15b에 도시된 바와 같이 조립된 출력 허브와 구동 캐뉼라의 근위 부분의 상면도이다.
도 17a는 도 16의 선(17-17)을 따라 취한 단면도이며, 도 15b에 예시한 바와 같이 출력 허브 내에 배열되는 구동 캐뉼라의 근위 부분을 도시한다.
도 17b는 도 17a의 출력 허브와 구동 캐뉼라의 근위 부분의 다른 단면도이며, 도 1, 도 2, 도 4, 도 5, 도 7b 내지 도 7i, 도 15b 및 도 15c의 드릴 비트의 탄성 아암이 구동 캐뉼라의 근위 부분의 보어 내에 배열되게 도시되어 있다.
도 17c는, 도 17b의 드릴 비트, 출력 허브 및 구동 캐뉼라의 근위 부분의 다른 단면도이며, 이때 드릴 비트의 탄성 아암은 도 15c에 예시된 바와 같이 구동 캐뉼라의 근위 부분의 잠금 표면과 접하게 배열되게 도시되어 있다.
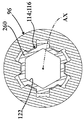
도 18a는 도 16의 선(18-18)을 따라 취한 단면도이며, 구동 캐뉼라의 근위 부분의 보어의 프로파일을 도시한다.
도 18b는 도 18a의 구동 캐뉼라의 근위 부분의 다른 단면도이며, 이때 도 1, 도 2, 도 4, 도 5, 도 7b 내지 도 7i, 도 15b 및 도 15c의 드릴 비트의 탄성 아암은 구동 캐뉼라의 근위 부분의 보어 내에 배열되며 그에 대항하여 접해 있으며, 드릴 비트는 도 17b에 예시된 대로 배치된다.
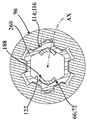
도 18c는, 도 18b의 드릴 비트 및 구동 캐뉼라의 근위 부분의 다른 단면도이며, 이때, 인터페이스는 구동 캐뉼라의 근위 부분의 보어 내에 배열된다.
도 19a는 도 16의 선(19-19)을 따라 취한 단면도이며, 구동 캐뉼라의 근위 부분과, 구동 캐뉼라의 구동 부분의 잠금 표면에 인접한 출력 허브 사이의 스플라인 맞물림을 도시한다.
도 19b는 출력 허브와 구동 캐뉼라의 근위 부분의 다른 단면도이다.
도 19c는 도 19a 및 도 19b의 출력 허브 및 구동 캐뉼라의 근위 부분의 다른 단면도이며, 드릴 비트의 탄성 아암의 일부분들이 구동 캐뉼라의 근위 부분의 보어 내에 배열되며 그에 대항하여 접하며, 드릴 비트는 도 17c에 예시된 바와 같이 배열되게 도시되어 있다.
도 20은, 도 1, 도 2, 도 4, 도 5, 도 7b 내지 도 7i, 도 15b, 도 15c, 도 17b, 도 17c, 도 19b 및 도 19c의 드릴 비트의 부분 사시도이며, 섕크의 근위 단부에 인접한 멈춤부, 인터페이스 및 탄성 아암의 추가 세부구성을 도시한다.
도 21은 도 20에 예시한 드릴 비트의 일부분들의 다른 부분 사시도이다.
도 22는 도 20 및 도 21에 예시한 드릴 비트의 일부분들의 좌측면도이다.
도 23은 도 20 내지 도 22에 예시한 드릴 비트의 일부분들의 상면도이다.
도 24a는 도 1, 도 2, 도 4, 도 5, 도 7b 내지 도 7i, 도 15b 및 도 15c의 드릴 비트와 도 15a 및 도 15b의 구동 캐뉼라의 근위 부분의 부분 사시도이며, 이때 드릴 비트의 인터페이스는 구동 캐뉼라의 근위 부분의 보어와 오정렬되게 도시되어 있다.
도 24b는, 도 24a의 구동 캐뉼라의 근위 부분과 드릴 비트의 다른 부분 사시도이며, 이때 드릴 비트의 인터페이스는 구동 캐뉼라의 근위 부분의 보어와 후속하여 정렬되게 도시되어 있다.
도 25는 다른 드릴 비트 구성의 부분 사시도이며, 단일 탄성 아암을 갖게 도시되어 있다.
도 26은 도 25에 예시한 드릴 비트의 구성의 다른 부분 사시도이다.
도 27은 다른 드릴 비트 구성의 부분 사시도이며, 3개의 탄성 아암을 갖게 도시되어 있다.
도 28은 도 27에 예시한 드릴 비트의 구성의 부분 길이 방향 단면도이며, 캐뉼라 삽입된 섕크(cannulated shank)를 갖게 도시되어 있다.
도 29는, 도 15c에 도시된 바와 같이 배치된 드릴 비트, 출력 허브 및 구동 캐뉼라의 근위 부분을 나타내는 정면 개략도이며, 이 개략도는 출력 허브와 구동 캐뉼라의 근위 부분 사이의 스플라인 맞물림에 의해 서로로부터 묘사되는 구동 캐뉼라의 근위 부분의 잠금 표면의 배치를 도시하고, 이 개략도는 구동 캐뉼라의 근위 부분의 보어 내에 배열되는 점선으로 드릴 비트의 인터페이스의 프로파일을 또한 도시하며, 개략도는 구동 캐뉼라의 근위 부분의 잠금 표면과의 접함 및 인터페이스의 프로파일에 대한 탄성 아암의 보유 표면의 방사상 접함을 예시하도록 일점쇄선에 의한 탄성 아암의 배치를 도시한다.
도 30은 도 29의 출력 허브와 구동 캐뉼라의 근위 부분을 나타내는 다른 정면 개략도이며, 이때, 드릴 비트의 구성은, 구동 캐뉼라의 근위 부분의 잠금 표면과 접하게 배치되며, 크기 및 형상을 갖게 도시되는 탄성 아암을 갖는다.
도 31은, 도 29 및 도 30의 출력 허브와 구동 캐뉼라의 근위 부분을 나타내는 다른 정면 개략도이며, 이때, 드릴 비트의 구성은 일반적으로 직사각형 프로파일을 갖게 도시되는 인터페이스를 갖는다.
도 32는, 도 29 내지 도 31의 출력 허브와 구동 캐뉼라의 근위 부분을 나타내는 다른 정면 개략도이며, 이때, 드릴 비트의 구성은 일반적으로 별-형상 프로파일을 갖게 도시되는 인터페이스를 갖는다.
도 33은, 도 29 내지 도 32의 출력 허브와 구동 캐뉼라의 근위 부분을 나타내는 다른 정면 개략도이며, 이때, 드릴 비트의 구성은 불규칙한 형상의 프로파일을 갖게 도시되는 인터페이스를 갖는다.
도 34는, 도 1 및 도 2의 엔드 이펙터 조립체의 부분 사시도이며, 드릴 비트의 원위 절단 팁 부분은 팁 프로텍터 내에 배열되게 도시되어 있다.
도 35는, 도 1, 도 2 및 도 34에 예시한 엔드 이펙터 조립체의 팁 프로텍터의 사시도이다.
도 36은, 도 35의 선(36-36)을 따라 취한 단면도이다.
도 37은 엔드 이펙터 조립체의 다른 팁 프로텍터 구성의 사시도이다.
도 38은 도 37의 선(38-38)을 따라 취한 단면도이다.
도 39는 엔드 이펙터 조립체의 다른 팁 프로텍터 구성의 사시도이다.
도 40은 도 39의 선(40-40)을 따라 취한 단면도이다.
도 41은 엔드 이펙터 조립체의 다른 팁 프로텍터 구성의 사시도이다.
도 42는 도 41의 선(42-42)을 따라 취한 단면도이다.
도 43은 엔드 이펙터 조립체의 다른 팁 프로텍터 구성의 사시도이다.
도 44는 도 43의 선(44-44)을 따라 취한 단면도이다.
도 45는 엔드 이펙터 조립체의 다른 팁 프로텍터 구성의 사시도이다.
도 46은 도 45의 선(46-46)을 따라 취한 단면도이다.
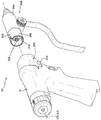
도 47은 외과용 핸드피스 조립체에 인접한 외과용 부착 모듈의 사시도이다.
도 48은, 도 47의 외과용 핸드피스 조립체에 인접한 외과용 부착 모듈의 다른 사시도이다.
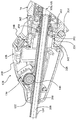
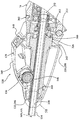
도 49는, 일반적으로 길이 방향 축을 따라 취한 도 47 및 도 48의 외과용 핸드피스 조립체에 결합되는 외과용 부착 모듈의 부분 등각 단면도이다.
도 50은, 일반적으로 길이 방향 축에 가로질러 취한 도 47 내지 도 49의 외과용 핸드피스 조립체의 부분 등각 단면도이다.
도 51은, 일반적으로 길이 방향 축에 가로질러 취한 도 47 내지 도 50의 외과용 핸드피스 조립체에 결합된 외과용 부착 모듈의 부분 등각 단면도이다.
도 52는, 외과용 핸드피스 조립체에 인접한 측정 모듈의 사시도이다.
도 53은, 도 52의 외과용 핸드피스 조립체에 인접한 측정 모듈의 다른 사시도이다.
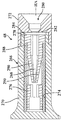
도 54는, 일반적으로 길이 방향 축을 따라 취한 도 52 및 도 53의 외과용 핸드피스 조립체에 결합된 측정 모듈의 부분 등각 단면도이다.
도 55는 외과용 핸드피스 조립체에 인접한 다른 측정 모듈의 사시도이다.
도 56은 도 55의 외과용 핸드피스 조립체에 인접한 측정 모듈의 다른 사시도이다.
도 57은, 일반적으로 길이 방향 축을 따라 취한 도 55 및 도 56의 외과용 핸드피스 조립체에 결합된 측정 모듈의 부분 등각 단면도이다.
도 58은, 도 57의 표시 58에서 취한, 도 55 내지 도 57의 외과용 핸드피스 조립체에 결합된 측정 모듈의 확대 상세도이다.
도 59는, 도 57의 표시 59에서 취한, 도 55 내지 도 58의 외과용 핸드피스 조립체에 결합된 측정 모듈의 다른 확대 상세도이다.
도 60은, 일반적으로 길이 방향 축에 가로질러 취한 도 55 내지 도 59의 외과용 핸드피스 조립체에 결합된 측정 모듈의 부분 등각 단면도이다.
도 61은, 일반적으로 길이 방향 축을 따라 및 도 57의 도면에 가로질러 취한 도 55 내지 도 60의 외과용 핸드피스 조립체에 결합된 측정 모듈의 단면도이다.
도 62는 도 55 내지 도 61의 측정 모듈의 부분 분해도이며, 측정 하우징 내부에 배열되는 바이어싱 메커니즘을 도시한다.
도 63은 도 55 내지 도 62의 측정 모듈의 확대도이며, 측정 하우징의 내부에 배열되는 바이어싱 메커니즘을 도시한다.
도 64는 도 55 내지 도 63의 측정 모듈의 사시도이다.
도 65는 도 55 내지 도 64의 측정 모듈의 사시도이며, 부싱(bushing)을 도시하며, 측정 하우징 및 깊이 캐뉼라를 점선으로 도시한다.
도 66은 도 55 내지 도 64의 측정 모듈의 사시도이며, 부싱의 원위 부분으로부터 부싱의 보어 내로 연장하는 돌출부를 도시한다.
Claims (68)
- 드릴 비트와 외과용 부착 모듈에 토크를 전달하기 위한 외과용 핸드피스로서,
근위 영역과 원위 영역을 포함하는 하우징 조립체로서, 상기 하우징 조립체의 원위 영역은 상기 외과용 부착 모듈에 탈착 가능하게 결합하도록 구성되는, 상기 하우징 조립체;
상기 하우징 조립체의 근위 영역에 인접하며 상기 하우징 조립체 내에 배치되는 모터로서, 상기 모터는 전원으로부터 파워를 수신하여 토크를 생성하도록 구성되는, 상기 모터;
상기 하우징 조립체에 결합되며 사용자에 의해 작동되도록 구성되는 사용자 입력 디바이스;
상기 사용자 입력 디바이스에 결합되며, 상기 사용자 입력 디바이스의 작동에 응답하여 신호를 생성하도록 구성되는 센서;
상기 센서와 모터에 결합되는 제어기로서, 상기 제어기는 상기 센서에 의해 생성되는 신호를 수신하여 상기 모터를 동작시켜 토크를 생성하도록 구성되는, 상기 제어기; 및
상기 하우징 조립체에 회전 가능하게 결합되며, 상기 모터로부터 토크를 받아 상기 모터에 응답하여 회전하도록 구성되는 구동 캐뉼라(drive cannula)를 포함하며, 상기 구동 캐뉼라는 근위 단부와 원위 단부 사이에서 길이 방향 축을 따라 연장하며, 상기 구동 캐뉼라는,
상기 근위 단부에 인접한 피구동 부분을 규정하는 외표면으로서, 상기 피구동 부분은 상기 모터로부터 토크를 받도록 구성되는, 상기 외표면,
상기 길이 방향 축을 따라 연장하는 보어(bore)를 규정하는 내표면으로서, 상기 보어는 상기 드릴 비트를 수용하도록 구성되고, 상기 내표면은 상기 구동 캐뉼라의 근위 단부에 인접한 제1 구동 부분을 포함하며, 상기 제1 구동 부분은 토크를 상기 드릴 비트에 전달하도록 구성되는, 상기 내표면, 및
토크를 상기 외과용 부착 모듈에 전달하도록 구성되는 제2 구동 부분을 포함하며 상기 원위 단부에 인접한 원위 돌출부로서, 상기 제1 구동 부분과 상기 제2 구동 부분은 서로 기하학적으로 상이한, 상기 원위 돌출부를 갖는, 외과용 핸드피스. - 청구항 1에 있어서, 상기 구동 캐뉼라의 외표면은, 상기 피구동 부분을 형성하도록 일반적으로 상기 길이 방향 축에 평행한 하나 이상의 홈을 규정하는, 외과용 핸드피스.
- 청구항 1 또는 청구항 2에 있어서, 상기 구동 캐뉼라의 외표면은, 상기 피구동 부분을 형성하도록 상기 길이 방향 축에 대해 외부로 연장하는 하나 이상의 돌출부를 포함하는, 외과용 핸드피스.
- 청구항 1 내지 청구항 3 중 어느 한 항에 있어서, 상기 내표면은, 상기 제1 구동 부분을 형성하도록 적어도 2개의 평면 표면을 포함하는, 외과용 핸드피스.
- 청구항 4에 있어서, 상기 내표면은, 상기 제1 구동 부분을 형성하도록 6개의 평면 표면을 포함하는, 외과용 핸드피스.
- 청구항 1 내지 청구항 5 중 어느 한 항에 있어서, 상기 구동 캐뉼라는, 상기 근위 단부로부터 상기 원위 단부를 향해 연장하는 본체 섹션을 포함하고, 상기 원위 돌출부는 원위 방향으로, 및 상기 본체 섹션으로부터 상기 원위 단부로 상기 길이 방향 축에 일반적으로 평행하게 연장하여, 토크를 결합을 통해 상기 외과용 부착 모듈에 전달하도록 구성되는 구동 도그(drive dog)를 형성하는, 외과용 핸드피스.
- 청구항 1 내지 청구항 6 중 어느 한 항에 있어서, 상기 구동 캐뉼라는 상기 근위 단부에 인접한 근위 영역과 상기 원위 단부에 인접한 원위 영역을 포함하며, 상기 근위 영역에서 상기 구동 캐뉼라의 내표면은 상기 근위 영역의 보어를 규정하도록 제1 횡단면 구역을 포함하고, 상기 원위 영역에서 상기 구동 캐뉼라의 내표면은 상기 원위 영역의 보어를 규정하도록 상기 제1 횡단면 구역보다 큰 제2 횡단면 구역을 포함하며, 상기 내표면은 상기 근위 영역과 상기 원위 영역 사이에 전환 표면을 포함하고, 상기 전환 표면은 상기 원위 영역으로부터 상기 길이 방향 축을 향해 테이퍼링되며(tapered), 상기 보어를 통한 상기 드릴 비트의 안내를 보조하도록 상기 제1 구동 부분에 대한 적절한 배향으로 구성되는, 외과용 핸드피스.
- 외과용 핸드피스 시스템으로서,
핸드피스 조립체로서,
근위 영역과 원위 영역을 갖는 핸드피스 하우징 조립체,
상기 핸드피스 하우징 조립체에 회전 가능하게 결합되며, 모터로부터 토크를 받아 상기 모터에 응답하여 회전하도록 구성되는 구동 캐뉼라를 포함하며, 상기 구동 캐뉼라는 근위 단부와 원위 단부 사이에서 길이 방향 축을 따라 연장하며, 상기 구동 캐뉼라는,
상기 근위 단부에 인접한 피구동 부분을 포함하며 상기 모터로부터 토크를 받도록 구성되는 외표면,
상기 길이 방향 축을 따라 연장하는 보어를 규정하는 내표면으로서, 상기 내표면은 상기 근위 단부에 인접한 제1 구동 부분을 포함하는, 상기 내표면, 및
제2 구동 부분을 포함하며 상기 원위 단부에 인접한 원위 돌출부를 포함하는, 상기 핸드피스 조립체;
맞물린 위치로 움직일 수 있는 드릴 비트로서, 이 맞물린 위치에서, 상기 드릴 비트는 상기 구동 캐뉼라의 보어에 적어도 부분적으로 수용되어, 상기 드릴 비트의 근위 단부가 상기 제1 구동 부분으로부터 토크를 받도록 위치지정되며 상기 드릴 비트의 원위 단부가 상기 핸드피스 하우징 조립체로부터 연장하는, 상기 드릴 비트; 및
구동 샤프트를 갖는 외과용 부착 모듈로서, 상기 외과용 부착 모듈은 맞물린 위치로 움직일 수 있으며, 이 맞물린 위치에서, 상기 외과용 부착 모듈은 상기 원위 영역에 인접하여 상기 핸드피스 하우징 조립체에 결합되어, 상기 외과용 부착 모듈의 구동 샤프트는 상기 원위 돌출부에 결합되며, 상기 외과용 부착 모듈은 상기 제2 구동 부분으로부터 토크를 받도록 구성되며, 상기 제1 구동 부분은 상기 제2 구동 부분과 기하학적으로 상이한, 상기 외과용 부착 모듈을 포함하는, 외과용 핸드피스 시스템. - 청구항 8에 있어서, 상기 외과용 부착 모듈은 사지털 소우(sagittal saw) 조립체, 왕복 소우 조립체, 드릴 척(chuck) 조립체, 리머(reamer) 조립체, 와이어 구동 조립체 및 버링(burring) 조립체 중 하나를 포함하는, 외과용 핸드피스 시스템.
- 청구항 8 또는 청구항 9에 있어서, 상기 핸드피스 하우징 조립체의 원위 영역에 인접하여 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합될 수 있는 측정 모듈을 더 포함하며, 상기 측정 모듈은, 상기 드릴 비트가 상기 맞물린 위치에 있을 때 상기 드릴 비트와 관련되는 측정 기능을 실행하도록 구성되며, 상기 측정 모듈은 상기 원위 영역에 인접하여 상기 핸드피스 하우징 조립체에 결합되도록 구성되며, 상기 측정 모듈은 측정 하우징과, 상기 측정 하우징에 슬라이딩 가능하게 결합되는 깊이 캐뉼라를 포함하는, 외과용 핸드피스 시스템.
- 청구항 10에 있어서, 상기 깊이 캐뉼라는 보어를 규정하는 내표면을 포함하며, 상기 깊이 캐뉼라의 보어는 상기 드릴 비트를 적어도 부분적으로 수용하도록 구성되며 상기 드릴 비트에 대하여 슬라이딩하도록 구성되는, 외과용 핸드피스 시스템.
- 청구항 11에 있어서, 상기 구동 캐뉼라, 상기 깊이 캐뉼라, 및 상기 드릴 비트는, 상기 드릴 비트가 상기 맞물린 위치에 있으며, 상기 측정 하우징이 상기 핸드피스 하우징 조립체에 결합될 때 동심에 있도록 배치되며, 상기 깊이 캐뉼라는, 상기 드릴 비트가 상기 맞물린 위치에 있으며, 상기 측정 하우징이 상기 핸드피스 하우징 조립체에 결합될 때 상기 구동 캐뉼라의 보어 내에 적어도 부분적으로 수용되게 하는 크기를 갖는, 외과용 핸드피스 시스템.
- 청구항 8 내지 청구항 12 중 어느 한 항에 있어서, 상기 구동 캐뉼라는, 상기 근위 단부로부터 상기 원위 단부를 향해 연장하는 본체 섹션을 포함하고, 상기 원위 돌출부는 원위 방향으로, 및 상기 본체 섹션으로부터 상기 원위 단부로 상기 길이 방향 축에 일반적으로 평행하게 연장하여, 토크를 결합을 통해 상기 외과용 부착 모듈에 전달하도록 구성되는 구동 도그를 형성하는, 외과용 핸드피스 시스템.
- 청구항 8 내지 청구항 13 중 어느 한 항에 있어서, 상기 외과용 부착 모듈은 외과용 부착 하우징과, 상기 외과용 부착 하우징에 회전 가능하게 결합되며 상기 구동 캐뉼라로부터 상기 원위 돌출부와의 결합을 통해 토크를 받도록 구성되는 상기 구동 샤프트와, 외과용 엔드 이펙터(surgical end effector)를 구동하도록 구성되는 출력 부재와, 상기 구동 샤프트 및 출력 부재에 결합되는 기어 트레인 및 링키지 중 적어도 하나를 포함하며, 상기 기어 트레인 및 링키지 중 적어도 하나는, 상기 외과용 엔드 이펙터를 구동하기 위해 상기 구동 캐뉼라로부터 받으며 상기 구동 샤프트에서 이용 가능한 토크를 상기 출력 부재에서 이용 가능한 기계적 파워로 변환하도록 구성되는, 외과용 핸드피스 시스템.
- 측정 기능과 외과 수술을 실행하기 위한 외과용 핸드피스 시스템으로서,
핸드피스 조립체로서,
근위 영역과 원위 영역을 포함하며, 상기 원위 영역에 인접하여 핸드피스 커플러를 포함하는 핸드피스 하우징 조립체, 및
상기 핸드피스 하우징 조립체에 회전 가능하게 결합되며, 축방향을 따라 연장하며, 모터로부터 토크를 받도록 구성되는 구동 캐뉼라를 포함하는, 상기 핸드피스 조립체;
상기 원위 영역에 인접하여 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합될 수 있는 외과용 부착 모듈로서,
외과용 부착 하우징으로서, 상기 핸드피스 커플러와 협력하여 상기 외과용 부착 하우징을 상기 원위 영역에 인접하여 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합하게 되는 외과용 부착 커플러를 포함하는, 상기 외과용 부착 하우징, 및
상기 외과용 부착 하우징에 회전 가능하게 결합되며 상기 구동 캐뉼라로부터 토크를 받아 엔드 이펙터를 동작하도록 구성되는 구동 샤프트를 포함하는, 상기 외과용 부착 모듈; 및
상기 원위 영역에 인접하여 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합될 수 있는 측정 모듈로서, 상기 측정 모듈은 상기 핸드피스 조립체의 동작과 관련되는 측정 기능을 실행하도록 구성되고, 상기 측정 모듈은 측정 하우징과 측정 커플러를 포함하며, 상기 측정 커플러는 상기 핸드피스 커플러와 협력하여 상기 측정 하우징을 상기 원위 영역에 인접하여 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합하도록 구성되는, 외과용 핸드피스 시스템. - 청구항 15에 있어서, 상기 핸드피스 하우징 조립체는, 전원이 상기 핸드피스 조립체에 결합될 때 상기 전원에 결합되는 제1 전기 커넥터를 포함하며, 상기 측정 하우징은, 상기 핸드피스 커플러가 상기 측정 커플러에 결합될 때 상기 제1 전기 커넥터에 맞물려 상기 핸드피스 하우징 조립체와 상기 측정 하우징 사이에 전기 파워를 송신하도록 구성되는 제2 전기 커넥터를 포함하는, 외과용 핸드피스 시스템.
- 청구항 15 또는 청구항 16에 있어서, 상기 구동 캐뉼라는 외표면을 포함하고, 상기 외표면은 상기 근위 단부에 인접한 피구동 부분을 규정하고, 상기 피구동 부분은 상기 모터로부터 토크를 받도록 구성되며, 상기 구동 캐뉼라는, 상기 길이 방향 축을 따라 연장하는 보어를 규정하는 내표면을 포함하며, 상기 내표면은 상기 구동 캐뉼라의 근위 단부에 인접한 제1 구동 부분을 포함하며, 상기 구동 캐뉼라는, 토크를 상기 외과용 부착 모듈에 전달하도록 구성되는 제2 구동 부분을 포함하며 상기 원위 단부에 인접한 원위 돌출부를 포함하며, 상기 제1 구동 부분과 상기 제2 구동 부분은 서로 기하학적으로 상이한, 외과용 핸드피스 시스템.
- 청구항 17에 있어서, 상기 구동 샤프트는, 상기 핸드피스 커플러가 상기 외과용 부착 커플러에 결합될 때 상기 제2 구동 부분에 탈착 가능하게 결합될 수 있어서 상기 외과용 핸드피스 조립체와 상기 외과용 부착 모듈 사이에 토크를 전달하도록 구성되는 커플러를 포함하는, 외과용 핸드피스 시스템.
- 청구항 17 또는 청구항 18에 있어서, 맞물린 위치로 움직일 수 있는 드릴 비트를 더 포함하며, 이 맞물린 위치에서, 상기 드릴 비트는, 상기 드릴 비트의 근위 단부가 상기 제1 구동 부분으로부터 토크를 받도록 위치지정되며 상기 드릴 비트의 원위 단부가 상기 핸드피스 하우징 조립체로부터 연장하도록, 상기 구동 캐뉼라의 보어에 적어도 부분적으로 수용되는, 외과용 핸드피스 시스템.
- 청구항 19에 있어서, 상기 측정 모듈은 상기 측정 하우징에 슬라이딩 가능하게 결합되는 깊이 캐뉼라를 포함하는, 외과용 핸드피스 시스템.
- 청구항 20에 있어서, 상기 깊이 캐뉼라는 보어를 규정하는 내표면을 포함하며, 상기 깊이 캐뉼라의 보어는 상기 드릴 비트를 적어도 부분적으로 수용하도록 구성되며 상기 드릴 비트에 대하여 슬라이딩하도록 구성되는, 외과용 핸드피스 시스템.
- 청구항 21에 있어서, 상기 구동 캐뉼라, 상기 깊이 캐뉼라 및 상기 드릴 비트는, 상기 드릴 비트가 맞물린 위치에 있으며 상기 측정 하우징이 상기 핸드피스 하우징 조립체에 결합될 때 동심에 있도록 배치되며, 상기 깊이 캐뉼라는, 상기 드릴 비트가 맞물린 위치에 있으며 상기 측정 하우징이 상기 핸드피스 하우징 조립체에 결합될 때 상기 구동 캐뉼라의 보어 내에 적어도 부분적으로 수용되는 크기를 갖는, 외과용 핸드피스 시스템.
- 외과용 핸드피스에 맞물리도록 하나 이상의 탄성 아암을 갖는 드릴 비트를 동작하기 위한 외과용 핸드피스 조립체로서,
근위 영역과 원위 영역을 포함하는 하우징 조립체;
상기 하우징 조립체에 회전 가능하게 결합되며 모터로부터 토크를 받으며 상기 모터에 응답하여 회전하도록 구성되는 구동 캐뉼라로서, 상기 구동 캐뉼라는 원위 단부와 근위 단부 사이에서 길이 방향 축을 따라 연장하며, 상기 구동 캐뉼라는, 상기 길이 방향 축을 따라 연장하는 보어를 규정하는 내표면을 포함하며, 상기 보어는 상기 드릴 비트를 수용하도록 구성되며, 상기 내표면은, 토크를 상기 드릴 비트에 전달하도록 구성되는 상기 근위 단부에 인접한 구동 부분을 포함하는, 상기 구동 캐뉼라;
상기 드릴 비트의 하나 이상의 탄성 아암을 보조하여 상기 구동 캐뉼라에 대한 상기 드릴 비트의 축방향 위치를 보유하도록 구성되며 상기 구동 캐뉼라의 근위 단부에 인접한 보유 표면; 및
상기 구동 캐뉼라의 근위 단부 근처의 릴리스 조립체로서, 상기 릴리스 조립체는, 상기 보유 표면에 대해 제1 위치와 제2 위치로 움직일 수 있는 릴리스 부재를 포함하며, 상기 릴리스 부재는, 상기 릴리스 부재가 상기 제1 위치로부터 상기 제2 위치로 움직임에 응답하여 상기 드릴 비트가 상기 구동 캐뉼라에 대해 축방향으로 움직이게 하도록, 상기 보유 표면과의 맞물림으로부터 상기 드릴 비트의 하나 이상의 탄성 아암을 동작되게 분리하도록 구성되는, 상기 릴리스 조립체를 포함하는, 외과용 핸드피스 조립체. - 청구항 23에 있어서, 상기 보유 표면은 상기 길이 방향 축으로부터 멀리 근위 방향으로부터 원위 방향으로 테이퍼링되는, 외과용 핸드피스 조립체.
- 청구항 23 또는 청구항 24에 있어서, 상기 릴리스 부재는 상기 길이 방향 축을 따라 상기 제1 위치 및 제2 위치로 움직이며, 상기 릴리스 부재는 상기 제1 위치에서 제1 거리로 상기 보유 표면으로부터 이격되며, 상기 릴리스 부재는 상기 제2 위치에서 상기 제1 거리 미만인 제2 거리로 상기 보유 표면으로부터 이격되는, 외과용 핸드피스 조립체.
- 청구항 25에 있어서, 상기 릴리스 조립체는, 상기 릴리스 부재를 상기 제1 위치를 향해 바이어싱하도록 구성되는 바이어싱 메커니즘을 더 포함하는, 외과용 핸드피스 조립체.
- 청구항 25 또는 청구항 26에 있어서, 상기 릴리스 부재는, 상기 드릴 비트의 하나 이상의 탄성 아암에 접하여 상기 제2 위치에서 상기 보유 표면으로부터 상기 하나 이상의 탄성 아암을 분리하도록 구성되는 릴리스 표면을 포함하는, 외과용 핸드피스 조립체.
- 청구항 27에 있어서, 상기 릴리스 표면은 상기 길이 방향 축으로부터 멀리 근위 방향으로부터 원위 방향으로 테이퍼링되는, 외과용 핸드피스 조립체.
- 청구항 27 또는 청구항 28에 있어서, 상기 릴리스 표면은 다수의 탄성 아암에 접하여 상기 보유 표면으로부터 상기 다수의 탄성 아암을 분리하도록 구성되는 환상 표면(annular surface)인, 외과용 핸드피스 조립체.
- 청구항 25 내지 청구항 29 중 어느 한 항에 있어서, 상기 릴리스 조립체는, 상기 길이 방향 축을 중심으로 회전하여 상기 릴리스 부재를 상기 길이 방향 축을 따라 상기 제1 및 제2 위치로 움직이도록 구성되는 칼라(collar)를 더 포함하는, 외과용 핸드피스 조립체.
- 청구항 30에 있어서, 상기 칼라는, 상기 길이 방향 축에 면하며 상기 길이 방향 축에 평행하게 연장하는 채널을 규정하는 내표면을 포함하며, 상기 릴리스 조립체는 상기 채널 내에서 적어도 부분적으로 움직이도록 구성되는 가이드 요소를 더 포함하며, 상기 가이드 요소는, 상기 하우징 조립체에 의해 형성되는 나선형 슬롯 내에서 적어도 부분적으로 움직이도록 구성되며, 상기 릴리스 부재는, 상기 가이드 요소를 수용하며 상기 나선형 슬롯과 채널 내에서 상기 가이드 요소를 담기 위한 리세스를 규정하며, 상기 칼라는 상기 길이 방향 축을 중심으로 상기 가이드 요소를 회전시키며 상기 나선형 슬롯과 채널 내에서 상기 가이드 요소를 적어도 부분적으로 움직여 상기 릴리스 부재를 상기 길이 방향 축을 따라 상기 제1 위치와 상기 제2 위치로 움직이도록 구성되는, 외과용 핸드피스 조립체.
- 청구항 23 내지 청구항 31 중 어느 한 항에 있어서, 상기 구동 캐뉼라는, 상기 구동 캐뉼라의 근위 단부에 인접한 상기 구동 캐뉼라의 근위면 상에 상기 보유 표면을 포함하는, 외과용 핸드피스 조립체.
- 핸드피스 축을 중심으로 각각 회전할 수 있는 구동 캐뉼라와 드릴 비트를 지지하는 핸드피스 하우징 조립체를 갖는 외과용 핸드피스 조립체로의 정렬을 용이하게 하기 위한 측정 모듈로서, 상기 드릴 비트는 상기 구동 캐뉼라의 보어 내에 배치되며 상기 핸드피스 축을 따라 연장하며, 상기 측정 모듈은:
측정 하우징으로서,
근위 표면을 갖는 근위 영역과 원위 영역을 갖는 본체;
상기 근위 영역으로부터 연장하며, 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합하도록 구성되는 측정 커플러를 포함하는, 상기 측정 하우징;
상기 측정 하우징에 움직일 수 있게 결합되며, 측정 축을 따라 상기 측정 하우징에 대해 상기 본체의 상기 근위 및 원위 영역을 통해 움직이도록 구성되는 깊이 캐뉼라로서, 상기 깊이 캐뉼라는 상기 드릴 비트를 수용하도록 구성되는 보어를 포함하며, 상기 깊이 캐뉼라는, 상기 측정 하우징이 상기 외과용 핸드피스 조립체에 결합될 때 상기 구동 캐뉼라의 보어에 의해 적어도 부분적으로 수용되도록 구성되는, 상기 깊이 캐뉼라;
상기 깊이 캐뉼라의 움직임에 응답하여 신호를 생성하도록 구성되는 변위 센서 조립체;
상기 측정 하우징에 결합되는 디스플레이; 및
상기 측정 하우징에 부분적으로 수용되며 근위 단부와 원위 단부 사이에서 상기 깊이 캐뉼라를 둘러싸는 부싱으로서, 상기 부싱의 근위 단부는 상기 측정 하우징의 근위 표면을 초과하여 연장하는, 상기 부싱을 포함하며, 상기 부싱은,
상기 측정 축에 동심인 보어를 규정하는 내표면으로서, 상기 부싱의 보어는 상기 깊이 캐뉼라를 둘러싸는, 상기 내표면, 및
상기 구동 캐뉼라의 보어의 내부 직경에 근사화되는 크기의 외부 직경을 가져 상기 측정 축을 상기 핸드피스 축에 정렬하는 상기 부싱의 근위 단부에 인접한 정렬 부분을 포함하는 외표면으로서, 이를 통해, 상기 깊이 캐뉼라, 상기 구동 캐뉼라 및 상기 드릴 비트 사이의 바인딩이, 상기 측정 하우징이 상기 외과용 핸드피스 조립체에 결합될 때 완화되게 하는, 상기 외표면을 포함하는, 측정 모듈. - 청구항 33에 있어서, 상기 부싱과 상기 깊이 캐뉼라 중 적어도 하나는 상기 부싱과 상기 깊이 캐뉼라 중 다른 하나를 향해 연장하는 하나 이상의 돌출부를 포함하며, 상기 하나 이상의 돌출부는, 상기 부싱의 보어에 및 상기 외과용 핸드피스 조립체의 구동 캐뉼라의 보어 내에 상기 깊이 캐뉼라의 중심을 두는 것을 보조하도록 구성되는, 측정 모듈.
- 청구항 33 또는 청구항 34에 있어서, 상기 측정 하우징에 회전 가능하게 결합되는 기어를 더 포함하며, 상기 부싱은, 상기 부싱의 외표면과 상기 부싱의 보어와 연통되는 상기 부싱의 원위 단부에 인접한 윈도우를 규정하여 상기 기어를 적어도 부분적으로 수용하며, 상기 깊이 캐뉼라의 외표면이 상기 깊이 캐뉼라의 적어도 부분 길이를 따라 선형적으로 배치되는 다수의 투쓰를 포함하며, 상기 기어는 상기 다수의 투쓰와 메싱 관계로 배치되어, 상기 기어의 회전과 상기 깊이 캐뉼라의 상기 측정 축을 따른 움직임은 정비례하게 되는, 측정 모듈.
- 청구항 35에 있어서, 상기 변위 센서 조립체는, 상기 측정 하우징에 결합되어 상기 기어의 회전에 응답하여 신호를 생성하는 센서를 포함하며, 상기 기어는 상기 깊이 캐뉼라의 움직임에 응답하여 회전하는, 측정 모듈.
- 청구항 35 또는 청구항 36에 있어서, 상기 기어에 결합되며 상기 기어를 바이어싱하여 일 방향으로 회전하게 하도록 구성되는 바이어싱 메커니즘을 더 포함하여, 이를 통해 상기 깊이 캐뉼라의 근위 단부는 상기 부싱의 원위 단부를 향해 바이어싱되는, 측정 모듈.
- 청구항 33 내지 청구항 37 중 어느 한 항에 있어서, 상기 측정 커플러가 상기 핸드피스 하우징 조립체에 결합될 때 상기 외과용 핸드피스 조립체 상의 상보적인 전기 리셉터클(receptacle)과 맞물리도록 구성되는 전기 커넥터를 더 포함하며, 상기 전기 커넥터는 상기 외과용 핸드피스 조립체로부터 전기 파워를 수신하도록 구성되며, 상기 전기 커넥터는 상기 변위 센서 조립체와 디스플레이에 결합되어, 상기 측정 커플러가 상기 핸드피스 하우징 조립체에 결합될 때 상기 변위 센서 조립체와 디스플레이에 전기 파워를 공급하는, 측정 모듈.
- 청구항 38에 있어서, 상기 전기 커넥터는, 상기 측정 하우징의 본체의 근위 표면으로부터 연장하며 상기 부싱으로부터 이격되는 하나 이상의 전기 단자를 포함하는, 측정 모듈.
- 청구항 39에 있어서, 상기 하나 이상의 전기 단자는 파워용 전기 단자, 접지용 전기 단자, 및 신호 전송용 전기 단자를 포함하는, 측정 모듈.
- 청구항 33 내지 청구항 40 중 어느 한 항에 있어서, 상기 측정 커플러는 상기 측정 하우징의 근위 표면으로부터 연장하는 베이오넷(bayonet) 커플러를 포함하는, 측정 모듈.
- 청구항 41에 있어서, 상기 베이오넷 커플러는 보어를 규정하며, 상기 부싱은, 상기 베이오넷 커플러의 보어 내에서 상기 측정 하우징의 근위면을 통해 연장하는, 측정 모듈.
- 모터 하우징에 배치되는 모터에 의해 핸드피스 축을 중심으로 회전 가능하게 각각 구동되는 구동 캐뉼라와 드릴 비트를 지지하는 핸드피스 하우징 조립체를 갖는 외과용 핸드피스 조립체로의 정렬을 용이하게 하기 위한 측정 모듈로서, 상기 드릴 비트는 상기 핸드피스 축을 따라 연장하며 상기 구동 캐뉼라의 보어 내에 배치되는, 상기 측정 모듈은:
근위 표면을 포함하는 근위 영역과 원위 영역을 포함하는 측정 하우징;
상기 측정 하우징에 움직일 수 있게 결합되며, 측정 축을 따라 상기 측정 하우징에 대해 상기 근위 및 원위 영역을 통해 움직이도록 구성되는 깊이 캐뉼라로서, 상기 깊이 캐뉼라는 상기 드릴 비트를 수용하도록 구성되는 보어를 포함하며, 상기 깊이 캐뉼라는, 상기 구동 캐뉼라의 보어에 의해 적어도 부분적으로 수용되도록 구성되는, 상기 깊이 캐뉼라;
상기 깊이 캐뉼라의 움직임에 응답하여 신호를 생성하도록 구성되는 변위 센서 조립체;
상기 측정 하우징에 결합되는 디스플레이; 및
상기 측정 하우징에 부분적으로 수용되며, 상기 근위 표면을 통해 돌출하는 근위 단부와 상기 측정 하우징의 원위 영역에 인접한 원위 단부 사이에서 상기 측정 축을 따라 연장하는 부싱으로서, 상기 부싱은,
제1 직경을 갖는 보어를 포함하는 상기 근위 단부에 인접한 근위 부분으로서, 상기 근위 부분은 상기 근위 부분의 보어와 연통하는 슬롯을 규정하며, 상기 근위 부분의 외표면은 상기 핸드피스 하우징 조립체의 핸드피스 커플러와 협력하여 상기 부싱을 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합하며, 상기 부싱의 근위 부분은 접하도록 구성되며, 상기 보어는 상기 측정 축을 상기 핸드피스 축과 정렬하도록 상기 모터 하우징을 둘러싸도록 구성되어, 이를 통해, 상기 깊이 캐뉼라, 상기 구동 캐뉼라 및 상기 드릴 비트 사이의 바인딩이, 상기 근위 부분이 상기 핸드피스 하우징 조립체에 결합될 때 완화되게 하는, 상기 근위 부분, 및
상기 근위 부분의 보어와 연통되게 보어를 포함하는, 상기 원위 단부와 상기 근위 단부 사이의 원위 부분으로서, 상기 원위 부분의 보어는, 상기 부싱 및 측정 축에 동심으로 상기 깊이 캐뉼라를 유지하는 것을 보조하도록 상기 깊이 캐뉼라의 외표면을 근사화하는 크기의 상기 제1 직경보다 작은 제2 직경을 갖는, 상기 원위 부분을 포함하는 상기 부싱을 포함하는, 측정 모듈. - 청구항 43에 있어서, 상기 부싱의 원위 부분과 상기 깊이 캐뉼라 중 적어도 하나는 상기 부싱의 원위 부분과 상기 깊이 캐뉼라 중 다른 하나를 향해 연장하는 하나 이상의 돌출부를 포함하며, 상기 하나 이상의 돌출부는, 상기 부싱의 원위 부분의 보어에 및 상기 외과용 핸드피스 조립체의 구동 캐뉼라의 보어 내에 상기 깊이 캐뉼라의 중심을 두는 것을 보조하도록 구성되는, 측정 모듈.
- 청구항 43에 있어서, 상기 측정 하우징에 회전 가능하게 결합되는 기어를 더 포함하며, 상기 부싱의 원위 부분은, 상기 부싱의 원위 부분의 외표면과 상기 부싱의 원위 부분의 보어와 연통되는 상기 부싱의 원위 단부에 인접한 윈도우를 규정하여 상기 기어를 적어도 부분적으로 수용하며, 상기 깊이 캐뉼라의 외표면이 상기 깊이 캐뉼라의 적어도 부분 길이를 따라 선형적으로 배치되는 다수의 투쓰를 포함하며, 상기 기어는 상기 다수의 투쓰와 메싱 관계로 배치되어, 상기 기어의 회전과 상기 깊이 캐뉼라의 상기 측정 축을 따른 움직임은 정비례하게 되는, 측정 모듈.
- 청구항 45에 있어서, 상기 변위 센서 조립체는, 상기 측정 하우징에 결합되어 상기 기어의 회전에 응답하여 신호를 생성하는 센서를 포함하며, 상기 기어는 상기 깊이 캐뉼라의 움직임에 응답하여 회전하는, 측정 모듈.
- 청구항 45 또는 청구항 46에 있어서, 상기 기어에 결합되며 상기 기어를 바이어싱하여 일 방향으로 회전하게 하도록 구성되는 바이어싱 메커니즘을 더 포함하여, 이를 통해 상기 깊이 캐뉼라의 근위 단부는 상기 부싱의 원위 단부를 향해 바이어싱되는, 측정 모듈.
- 청구항 43 내지 청구항 47 중 어느 한 항에 있어서, 상기 부싱이 상기 핸드피스 하우징 조립체에 결합될 때 상기 외과용 핸드피스 조립체 상의 상보적인 전기 리셉터클과 맞물리도록 구성되는 전기 커넥터를 더 포함하며, 상기 전기 커넥터는 상기 외과용 핸드피스 조립체로부터 전기 파워를 수신하도록 구성되며, 상기 전기 커넥터는 상기 변위 센서 조립체와 디스플레이에 결합되어, 상기 부싱이 상기 핸드피스 하우징 조립체에 결합될 때 상기 변위 센서 조립체와 디스플레이에 전기 파워를 공급하는, 측정 모듈.
- 청구항 47 또는 청구항 48에 있어서, 상기 전기 커넥터는, 상기 측정 하우징의 근위 표면으로부터 연장하며 상기 부싱으로부터 이격되는 하나 이상의 전기 단자를 포함하는, 측정 모듈.
- 청구항 49에 있어서, 상기 하나 이상의 전기 단자는 파워용 전기 단자, 접지용 전기 단자, 및 신호 전송용 전기 단자를 포함하는, 측정 모듈.
- 청구항 43 내지 청구항 50 중 어느 한 항에 있어서, 상기 부싱의 근위 부분은 베이오넷 커플러를 포함하는, 측정 모듈.
- 청구항 43 내지 청구항 51 중 어느 한 항에 있어서, 상기 부싱의 근위 부분은, 상기 모터 하우징의 일부분을 수용하여 상기 외과용 핸드피스 조립체에 대해 상기 부싱을 방사상으로 정렬하는 것을 보조하도록 구성되며 상기 부싱의 보어와 연통하는 하나 이상의 리세스를 규정하는, 측정 모듈.
- 핸드피스 축을 중심으로 각각 회전할 수 있는 구동 캐뉼라와 드릴 비트를 지지하는 핸드피스 하우징 조립체를 갖는 외과용 핸드피스 조립체로의 정렬을 용이하게 하기 위한 측정 모듈로서, 상기 드릴 비트는 상기 구동 캐뉼라의 보어 내에 배치되며 핸드피스 축을 따라 연장하며, 상기 측정 모듈은:
근위 표면을 포함하는 근위 영역과 원위 영역을 포함하는 측정 하우징;
상기 측정 하우징에 움직일 수 있게 결합되는 깊이 캐뉼라로서, 상기 깊이 캐뉼라는, 근위 단부, 원위 단부 및 측정 축을 따라 그 사이에 배치되는 길이를 포함하며, 상기 깊이 캐뉼라는 상기 측정 축을 따라 상기 측정 하우징에 대해 상기 근위 및 원위 영역을 통해 움직이도록 구성되며, 상기 깊이 캐뉼라는,
상기 드릴 비트를 수용하도록 구성되며 상기 근위 및 원위 단부를 통해 연장하는 보어,
상기 깊이 캐뉼라의 외표면으로부터 외부로 연장하는 하나 이상의 돌출부를 포함하는, 상기 깊이 캐뉼라;
상기 측정 하우징에 부분적으로 수용되며, 상기 측정 하우징의 근위 표면을 통해 돌출하는 근위 단부와 상기 측정 하우징의 원위 영역에 인접한 원위 단부 사이에서 상기 측정 축을 따라 연장하는 부싱으로서, 상기 부싱은,
상기 깊이 캐뉼라를 수용하도록 구성되는 보어, 및
상기 부싱의 보어 내로 연장하는 하나 이상의 돌출부를 포함하는, 상기 부싱;
상기 부싱의 근위 단부에 인접하며 상기 핸드피스 하우징 조립체에 탈착 가능하게 결합될 수 있는 측정 커플러;
상기 깊이 캐뉼라의 움직임에 응답하여 신호를 생성하도록 구성되는 변위 센서 조립체; 및
상기 측정 하우징에 결합되는 디스플레이를 포함하며,
상기 깊이 캐뉼라의 외표면으로부터 외부로 연장하는 상기 하나 이상의 돌출부는 상기 구동 캐뉼라와 상기 부싱 중 적어도 하나에 접하도록 구성되며, 상기 깊이 캐뉼라의 외표면으로부터 외부로 연장하는 상기 하나 상의 돌출부는 상기 부싱의 보어 내로 연장하는 상기 하나 이상의 돌출부와 협력하여, 상기 부싱의 보어에서 및 상기 외과용 핸드피스 조립체의 구동 캐뉼라의 보어 내에서 상기 깊이 캐뉼라의 중심을 두는 것을 보조하도록 구성되어, 이를 통해, 상기 깊이 캐뉼라, 상기 구동 캐뉼라 및 상기 드릴 비트 사이의 바인딩이, 상기 측정 커플러가 상기 핸드피스 하우징 조립체에 결합될 때 완화되게 하는, 측정 모듈. - 청구항 53에 있어서, 상기 측정 하우징에 회전 가능하게 결합되는 기어를 더 포함하며, 상기 부싱은, 상기 부싱의 외표면과 상기 부싱의 보어와 연통되는 상기 부싱의 원위 단부에 인접한 윈도우를 규정하며, 상기 윈도우는 적어도 부분적으로 상기 기어를 수용하며 상기 깊이 캐뉼라의 외표면이 상기 깊이 캐뉼라의 적어도 부분 길이를 따라 선형적으로 배치되는 다수의 투쓰를 포함하며, 상기 기어는 상기 다수의 투쓰와 메싱 관계로 배치되어, 상기 기어의 회전과 상기 깊이 캐뉼라의 상기 측정 축을 따른 움직임은 정비례하게 되는, 측정 모듈.
- 청구항 54에 있어서, 상기 변위 센서 조립체는, 상기 측정 하우징에 결합되어 상기 기어의 회전에 응답하여 신호를 생성하는 센서를 포함하며, 상기 기어는 상기 깊이 캐뉼라의 움직임에 응답하여 회전하는, 측정 모듈.
- 청구항 54 또는 청구항 55에 있어서, 상기 기어에 결합되며 상기 기어를 바이어싱하여 일 방향으로 회전하게 하도록 구성되는 바이어싱 메커니즘을 더 포함하여, 이를 통해 상기 깊이 캐뉼라의 근위 단부는 상기 부싱의 원위 단부를 향해 바이어싱되는, 측정 모듈.
- 청구항 53 내지 청구항 56 중 어느 한 항에 있어서, 상기 측정 커플러가 상기 핸드피스 하우징 조립체에 결합될 때 상기 외과용 핸드피스 조립체 상의 상보적인 전기 리셉터클과 맞물리도록 구성되는 전기 커넥터를 더 포함하며, 상기 전기 커넥터는 상기 외과용 핸드피스 조립체로부터 전기 파워를 수신하도록 구성되며, 상기 전기 커넥터는 상기 변위 센서 조립체와 디스플레이에 결합되어, 상기 측정 커플러가 상기 핸드피스 하우징 조립체에 결합될 때 상기 변위 센서 조립체와 상기 디스플레이에 전기 파워를 공급하는, 측정 모듈.
- 청구항 57에 있어서, 상기 전기 커넥터는, 상기 측정 하우징의 근위 표면으로부터 연장하며 상기 부싱으로부터 이격되는 하나 이상의 전기 단자를 포함하는, 측정 모듈.
- 청구항 58에 있어서, 상기 하나 이상의 전기 단자는 파워용 전기 단자, 접지용 전기 단자, 및 신호 전송용 전기 단자를 포함하는, 측정 모듈.
- 청구항 53 내지 청구항 59 중 어느 한 항에 있어서, 상기 부싱과 상기 측정 하우징 중 하나는 상기 측정 커플러를 포함하는, 측정 모듈.
- 청구항 53 내지 청구항 60 중 어느 한 항에 있어서, 상기 측정 커플러는 베이오넷 커플러를 포함하는, 측정 모듈.
- 청구항 53 내지 청구항 61 중 어느 한 항에 있어서, 상기 깊이 캐뉼라의 외표면으로부터 외부로 연장하는 하나 이상의 돌출부는 환상 링을 포함하는, 측정 모듈.
- 외과용 핸드피스 조립체의 구동 캐뉼라에 릴리스 가능하게 부착하기 위한 엔드 이펙터 조립체로서,
절단 팁 부분과 삽입 부분 사이에서 축을 따라 연장하는 드릴 비트; 및
상기 핸들 축을 따라 연장하는 핸들 보어를 가진 핸들과, 상기 핸들 보어 내에서 회전 가능하게 지지되며, 상기 핸들에 대해 상기 핸들 축을 따라 병진하는 것이 제약되는 수용기를 포함하는 팁 프로텍터로서, 상기 수용기는 상기 드릴 비트의 절단 팁 부분을 수용할 수 있는 리셉터클을 규정하는, 상기 팁 프로텍터를 포함하며,
상기 핸들은 사용자에 의해 쥐어져, 상기 드릴 비트를 상기 외과용 핸드피스 조립체에 부착하는 것을 용이하게 하도록 되어 있어서, 이를 통해 상기 드릴 비트와 상기 수용기가 상기 핸들에 대해 동시에 회전하는, 엔드 이펙터 조립체. - 청구항 63에 있어서, 상기 드릴 비트의 삽입 부분은:
근위 단부와 원위 단부 사이에서 축을 따라 연장하는 섕크(shank)로서, 상기 절단 팁 부분이 상기 원위 단부에 인접하여 배치되는, 상기 섕크;
상기 근위 단부와 상기 원위 단부 사이에 배치되는 인터페이스로서, 상기 인터페이스는 제1 인터페이스 거리로 상기 축으로부터 이격된 최외부 구동 부분을 포함하는, 상기 인터페이스; 및
상기 섕크의 근위 단부로부터 아암 단부로 연장하는 탄성 아암으로서, 상기 탄성 아암은 상기 축으로부터 멀리 면하는 외부 아암 표면을 포함하며, 상기 탄성 아암은:
상기 외부 아암 표면이 상기 제1 인터페이스 거리보다 더 먼 제1 아암 거리로 상기 축으로부터 이격되는 제1 위치와,
상기 외부 아암 표면이 상기 제1 아암 거리 미만인 제2 아암 거리로 상기 축으로부터 이격되는 제2 위치 사이에서 상기 축에 대해 움직일 수 있는, 상기 탄성 아암을 포함하며,
상기 탄성 아암은, 상기 엔드 이펙터 조립체의 드릴 비트가 상기 외과용 핸드피스 조립체에 부착됨에 따라 상기 핸들에 인가된 힘에 응답하여 상기 탄성 아암이 상기 제1 위치로부터 상기 제2 위치로 움직임에 따라 상기 축을 중심으로 상기 드릴 비트의 적어도 부분적인 회전을 촉진하도록 구성되는 정렬 요소를 상기 아암 단부에 더 포함하는, 엔드 이펙터 조립체. - 청구항 63 또는 청구항 64에 있어서, 상기 팁 프로텍터의 적어도 일부분이 탄성적으로 변형될 수 있는, 엔드 이펙터 조립체.
- 청구항 63 내지 청구항 65 중 어느 한 항에 있어서, 상기 수용기는 상이한 크기의 드릴 비트의 절단 팁 부분을 수용하도록 구성되는, 엔드 이펙터 조립체.
- 청구항 63 내지 청구항 66 중 어느 한 항에 있어서, 상기 드릴 비트는 강자성 소재로 형성되며;
상기 팁 프로텍터는 상기 수용기 내에서 상기 드릴 비트의 절단 팁 부분을 유지할 수 있는 자석을 더 포함하는, 엔드 이펙터 조립체. - 외과용 핸드피스 조립체의 구동 캐뉼라에 릴리스 가능하게 부착하기 위한 엔드 이펙터 조립체로서,
절단 팁 부분과 삽입 부분 사이에서 축을 따라 연장하는 드릴 비트; 및
상기 드릴 비트의 절단 팁 부분에 탈착 가능하게 결합될 수 있어서, 상기 절단 팁 부분에 접촉하지 않고도 사용자가 상기 드릴 비트를 취급하게 하기 위한 팁 프로텍터를 포함하는, 엔드 이펙터 조립체.
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762546760P | 2017-08-17 | 2017-08-17 | |
| US62/546,760 | 2017-08-17 | ||
| US201762548357P | 2017-08-21 | 2017-08-21 | |
| US62/548,357 | 2017-08-21 | ||
| US201862618134P | 2018-01-17 | 2018-01-17 | |
| US62/618,134 | 2018-01-17 | ||
| US15/887,507 | 2018-02-02 | ||
| US15/887,507 US10159495B1 (en) | 2017-08-21 | 2018-02-02 | Drill bit for a handheld surgical instrument |
| PCT/IB2018/056251 WO2019035096A1 (en) | 2017-08-17 | 2018-08-17 | SURGICAL HANDPIECE FOR MEASURING THE DEPTH OF BOREHOLES AND ASSOCIATED ACCESSORIES |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200042506A true KR20200042506A (ko) | 2020-04-23 |
Family
ID=65362830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207007654A Ceased KR20200042506A (ko) | 2017-08-17 | 2018-08-17 | 보어 홀의 깊이를 측정하기 위한 외과용 핸드피스 및 관련 부속품 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US11317927B2 (ko) |
| EP (2) | EP4289388A3 (ko) |
| JP (3) | JP7198271B2 (ko) |
| KR (1) | KR20200042506A (ko) |
| CN (2) | CN111246810B (ko) |
| AU (2) | AU2018316833B2 (ko) |
| BR (1) | BR112020003186A2 (ko) |
| CA (1) | CA3073178A1 (ko) |
| WO (1) | WO2019035096A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230019958A (ko) * | 2020-07-07 | 2023-02-09 | 비엔-에어 홀딩 에스에이 | 수술용 마이크로모터 |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11197733B2 (en) | 2017-04-12 | 2021-12-14 | Mako Surgical Corp. | Packaging systems and methods for mounting a tool on a surgical device |
| EP4289388A3 (en) * | 2017-08-17 | 2024-02-14 | Stryker Corporation | Surgical handpiece for measuring depth of bore holes and related accessories |
| US11896239B2 (en) * | 2017-08-17 | 2024-02-13 | Stryker Corporation | Surgical handpiece system for depth measurement and related accessories |
| AU2019263254C1 (en) * | 2018-05-01 | 2025-06-19 | Stryker Corporation | Powered surgical drill having transducer assembly including at least two rotation sensor devices for use in determining bore depth of a drilled hole |
| JP2022500096A (ja) * | 2018-07-31 | 2022-01-04 | シンセス・ゲーエムベーハーSynthes GmbH | 外科用器具 |
| US11871924B2 (en) * | 2018-09-21 | 2024-01-16 | Covidien Lp | Hand-held surgical instruments |
| USD893027S1 (en) | 2018-12-21 | 2020-08-11 | Stryker Corporation | Measurement head for surgical tool |
| KR102903298B1 (ko) * | 2019-05-15 | 2025-12-24 | 스트리커 코포레이션 | 회전 필드 비트 식별부를 갖는 전동 수술용 드릴 |
| US11395711B2 (en) | 2019-06-05 | 2022-07-26 | Stryker European Operations Limited | Packaging systems and methods for mounting a tool on a surgical device using the same |
| US11154308B2 (en) * | 2019-08-14 | 2021-10-26 | Arthrex, Inc. | Drill assembly for preparation of surgical sites |
| EP4400070B1 (en) | 2019-10-11 | 2025-11-19 | Stryker Corporation | Systems for using the status of a motor during a surgical drilling procedure to improve efficiency of a breakthrough algorithm |
| US11471168B2 (en) * | 2019-12-20 | 2022-10-18 | Innovations 4 Surgery, LLC | Medical devices and related methods for transforming bone, other tissue, or material |
| US12279779B2 (en) * | 2020-04-10 | 2025-04-22 | Stryker European Operations Limited | Surgical drilling system for determining bone breakthrough |
| US12433686B2 (en) | 2020-08-04 | 2025-10-07 | Stryker Corporation | Systems and methods for visualizing a trajectory with a surgical instrument |
| CN114073555B (zh) * | 2020-08-13 | 2025-06-27 | 柯惠Lp公司 | 手持式手术器械 |
| JP2023550408A (ja) | 2020-11-18 | 2023-12-01 | ストライカー・コーポレイション | 切削ツールの貫通深さを特定するための外科システム及び方法 |
| USD954950S1 (en) | 2020-11-18 | 2022-06-14 | Stryker Corporation | Measurement head for a surgical tool |
| EP4008462A1 (en) * | 2020-12-04 | 2022-06-08 | MAPAL Fabrik für Präzisionswerkzeuge Dr. Kress KG | Method for determining a working depth of a tool, tool for machining a workpiece, depth determination device, tool assembly, and method for using such tool assembly |
| KR102285936B1 (ko) * | 2021-03-04 | 2021-08-04 | 아이메디컴(주) | 정형외과용 전동기구 |
| AU2022373362A1 (en) | 2021-10-19 | 2024-05-02 | Stryker Corporation | Powered surgical drill having a depth measurement extension |
| CN114521936B (zh) * | 2022-01-11 | 2024-03-01 | 中国人民解放军陆军军医大学第一附属医院 | 一种医用电钻 |
| USD1031031S1 (en) | 2022-01-14 | 2024-06-11 | Stryker Corporation | Surgical handpiece |
| USD1028228S1 (en) | 2022-01-14 | 2024-05-21 | Stryker Corporation | Surgical handpiece |
| USD1028230S1 (en) | 2022-01-14 | 2024-05-21 | Stryker Corporation | Surgical handpiece |
| USD1028229S1 (en) | 2022-01-14 | 2024-05-21 | Stryker Corporation | Surgical handpiece |
| USD1030054S1 (en) | 2022-03-18 | 2024-06-04 | Stryker Corporation | Surgical handpiece |
| US11660712B1 (en) | 2022-04-29 | 2023-05-30 | Stryker Corporation | Method of assembling a measurement module for a surgical handpiece system |
| JP2025522447A (ja) | 2022-06-13 | 2025-07-15 | ストライカー・コーポレイション | 外科的処置中の手持ち式手術用ツールの軌道案内 |
| US12514594B2 (en) * | 2022-06-13 | 2026-01-06 | Stryker Corporation | Surgical attachments for a surgical handpiece system |
| CN115363687B (zh) * | 2022-09-05 | 2024-01-09 | 诺鑫(南通)医疗技术有限公司 | 一种具有测量深度功能的骨钻装置 |
| JP2025530271A (ja) | 2022-09-08 | 2025-09-11 | ストライカー・ユーロピアン・オペレーションズ・リミテッド | ナビゲーション支援手術のための手術器具の構成要素を関連付けるためのシステムおよび方法 |
| KR102951432B1 (ko) * | 2023-11-15 | 2026-04-10 | 경북대학교 산학협력단 | 수술용 드릴링 장치 및 시스템 |
| KR102951464B1 (ko) * | 2023-11-15 | 2026-04-10 | 경북대학교 산학협력단 | 수술용 드릴링 장치 및 시스템 |
Family Cites Families (127)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2763935A (en) | 1954-06-11 | 1956-09-25 | Purdne Res Foundation | Determining depth of layers of fat and of muscle on an animal body |
| US3897166A (en) | 1971-12-29 | 1975-07-29 | Ralph D Adams | Drill feed control |
| US3837661A (en) | 1972-06-21 | 1974-09-24 | Excellon Ind | Chuck sleeve |
| CH633954A5 (de) | 1978-05-20 | 1983-01-14 | Synthes Ag | Einrichtung zum einschrauben einer schraube in einen knochen bei einer operativen knochenbehandlung. |
| US4310269A (en) | 1980-02-19 | 1982-01-12 | Northrop Corporation | Drill break-through sensor |
| US4688970A (en) | 1985-08-09 | 1987-08-25 | Dresser Industries, Inc. | Power drill and automatic control system therefore |
| US4752161A (en) | 1985-12-16 | 1988-06-21 | The Boeing Company | Hand-held drill with self-advancing bit |
| US5071293A (en) | 1989-10-30 | 1991-12-10 | Mcdonnell Douglas Corporation | Feed rate regulator for a hand-held drill |
| US5200747A (en) | 1990-12-13 | 1993-04-06 | Bourns, Inc. | Turn counting position sensor |
| US5257531A (en) | 1992-08-17 | 1993-11-02 | Masashi Motosugi | Apparatus for monitoring machining state of drill |
| US5499984A (en) | 1994-04-07 | 1996-03-19 | Snap-On Incorporated | Universal modular reamer system |
| US5667509A (en) | 1995-03-02 | 1997-09-16 | Westin; Craig D. | Retractable shield apparatus and method for a bone drill |
| AUPN741996A0 (en) * | 1996-01-04 | 1996-01-25 | Interfix Limited | A driver |
| US5838222A (en) | 1996-01-16 | 1998-11-17 | Bi Technologies Corporation | Multiturn potentiometer |
| IT1289301B1 (it) * | 1996-10-31 | 1998-10-02 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant Anna | Trapano manuale ad uso ortopedico con controllo di avanzamento e sfondamento incipiente |
| SE9604717L (sv) | 1996-12-20 | 1998-06-21 | Nobel Biocare Ab | Kirurgiinstrument och arrangemang med sådant kirurgiinstrument |
| US6607509B2 (en) | 1997-12-31 | 2003-08-19 | Medtronic Minimed, Inc. | Insertion device for an insertion set and method of using the same |
| US5895389A (en) | 1997-05-29 | 1999-04-20 | Synthes (U.S.A.) | Drilling guide and measuring instrumentation |
| US6391005B1 (en) | 1998-03-30 | 2002-05-21 | Agilent Technologies, Inc. | Apparatus and method for penetration with shaft having a sensor for sensing penetration depth |
| US6514258B1 (en) | 1998-11-04 | 2003-02-04 | Implant Innovations, Inc. | Penetration limiting stop elements for a drill bit used for bone tissue |
| SE9902734D0 (sv) | 1999-07-19 | 1999-07-19 | Pacesetter Ab | Battery status detection |
| US6394806B1 (en) | 1999-09-14 | 2002-05-28 | Nobel Biocare Usa, Inc | Snap-in healing cap |
| FR2804353B1 (fr) | 2000-01-28 | 2002-04-19 | Recoules | Machine pneumatique d'usinage |
| EP2322104B1 (en) * | 2000-02-18 | 2017-10-25 | Stryker Corporation | Surgical handpiece with a push rod that both transfers rotational movement to an output drive shaft and that actuates a cutting accessory locking assembly |
| US6382977B1 (en) | 2000-03-02 | 2002-05-07 | Nobel Biocare Usa, Inc. | Snap-in impression coping |
| AU768553B2 (en) | 2000-03-06 | 2003-12-18 | Synthes Gmbh | Coupling device for instrument parts |
| WO2001083933A1 (en) | 2000-05-03 | 2001-11-08 | Cybersonics, Inc. | Smart-ultrasonic/sonic driller/corer |
| US6336931B1 (en) | 2000-05-17 | 2002-01-08 | Yeh-Liang Hsu | Automatic bone drilling apparatus for surgery operation |
| DE10064975C1 (de) | 2000-12-23 | 2002-07-25 | Aesculap Ag & Co Kg | Bohrwerkzeug für eine chirurgische Bohrmaschine |
| DE10117952B4 (de) | 2001-04-10 | 2004-07-08 | Hilti Ag | Handwerkzeuggerät mit elektronischem Tiefenanschlag |
| EP1392125A1 (en) | 2001-05-15 | 2004-03-03 | The Procter & Gamble Company | Confectionery compositions |
| US6620101B2 (en) | 2001-07-26 | 2003-09-16 | Dentosonic Ltd. | Bone measurement device |
| US6783533B2 (en) * | 2001-11-21 | 2004-08-31 | Sythes Ag Chur | Attachable/detachable reaming head for surgical reamer |
| FR2835732B1 (fr) | 2002-02-11 | 2004-11-12 | Spinevision | Dispositif permettant le suivi de la penetration d'un moyen de penetration dans des elements anatomiques |
| US20050131415A1 (en) * | 2002-04-24 | 2005-06-16 | Hearn Trevor C. | Adaptive apparatus for driving a threaded device into material such as a biological tissue |
| US20030233098A1 (en) | 2002-06-18 | 2003-12-18 | Stryker Spine | Variable depth drill guide |
| DE10239673A1 (de) | 2002-08-26 | 2004-03-11 | Markus Schwarz | Vorrichtung zur Bearbeitung von Teilen |
| US6665948B1 (en) * | 2002-09-05 | 2003-12-23 | Scott Hal Kozin | Drill bit penetration measurement system and method |
| DE10243651A1 (de) | 2002-09-19 | 2004-04-01 | Claas Fertigungstechnik Gmbh | Verfahren und Vorrichtung zur Eindringtiefenermittlung |
| US20040092941A1 (en) | 2002-11-12 | 2004-05-13 | Jansen Keith E. | Serratome vertebral cortical endplate cutter |
| DE10303964A1 (de) * | 2003-01-31 | 2004-08-19 | Wolfgang Prof. Dr. Oettinger | Medizinische Bohrvorrichtung und medizinisches Bohrverfahren |
| EP1613211B1 (en) | 2003-03-25 | 2018-05-09 | Path Scientific, LLC | Drill device for forming microconduits |
| US20050116673A1 (en) * | 2003-04-18 | 2005-06-02 | Rensselaer Polytechnic Institute | Methods and systems for controlling the operation of a tool |
| DE10318799A1 (de) * | 2003-04-25 | 2004-11-18 | Robert Bosch Gmbh | Automatische Bohrtiefenmessung an Handwerkzeugmaschinen |
| US7141074B2 (en) | 2003-09-17 | 2006-11-28 | Depuy Spine, Inc. | Variable depth drill with self-centering sleeve |
| FR2865921B1 (fr) | 2004-02-11 | 2007-06-01 | Spinevision | Dispositif d'exploration pour le suivi de la penetration d'un instrument dans une structure anatomique |
| US7163542B2 (en) | 2004-03-30 | 2007-01-16 | Synthes (U.S.A.) | Adjustable depth drill bit |
| FR2874497B1 (fr) | 2004-08-25 | 2007-06-01 | Spinevision Sa | Implant comprenant une ou plusieurs electrodes et instrument de pose associe |
| US7552781B2 (en) * | 2004-10-20 | 2009-06-30 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| IL166115A (en) | 2005-01-03 | 2012-06-28 | Dan Adam | Depth measurement, the sound is based on sound for medical applications |
| US20060259055A1 (en) * | 2005-05-13 | 2006-11-16 | Linvatec Corporation | Attachments for arthroscopic shaver handpieces |
| US7815433B2 (en) * | 2005-06-10 | 2010-10-19 | Tti Turner Technology Instruments Inc. | Adjustable tool drive arrangement |
| CA2612972A1 (en) * | 2005-06-25 | 2007-01-04 | Stryker Corporation | Surgical handpiece with compact clutch and anti-wobble coupling head |
| WO2007008703A2 (en) | 2005-07-08 | 2007-01-18 | Conceptual Gray, Llc | Apparatus and method thereof for drilling holes in discrete controlled increments |
| DE102005038090A1 (de) | 2005-08-11 | 2007-02-15 | Hilti Ag | Werkzeugmaschine mit Eindringtiefenmessung für Werkzeuge |
| US7771143B2 (en) | 2006-03-03 | 2010-08-10 | Warsaw Orthopedic, Inc | Drill bit assembly with adjustable drill stop sleeve |
| GB0612452D0 (en) | 2006-06-22 | 2006-08-02 | Univ Aston | Improvements in or relating to drilling apparatus and methods |
| US8460297B2 (en) | 2007-01-05 | 2013-06-11 | Biomet 3I, Llc | Drill bit assembly for bone tissue including depth limiting feature |
| EP2191787A1 (en) | 2007-06-27 | 2010-06-02 | Roland Dricot | Drill tool for lifting bone membrane |
| US8249696B2 (en) | 2007-12-19 | 2012-08-21 | Depuy Spine, Inc. | Smart pedicle tool |
| WO2009111387A1 (en) | 2008-03-03 | 2009-09-11 | Biospinex, Llc | Methods and devices for in situ tissue navigation |
| WO2009117836A1 (en) * | 2008-03-28 | 2009-10-01 | Quanser Consulting Inc. | Drill assembly and method to reduce drill bit plunge |
| US8277154B2 (en) * | 2008-05-30 | 2012-10-02 | The Boeing Company | Adaptive thrust sensor drilling |
| EP2130513A1 (de) | 2008-06-06 | 2009-12-09 | Straumann Holding AG | Vorrichtung zum Anbringen einer Abformkappe an einem Zahnimplantat |
| ES2620362T3 (es) * | 2008-06-26 | 2017-06-28 | Wayne Anderson | Dispositivos médicos con accionadores de profundidad controlada |
| CA2735131A1 (en) | 2008-09-02 | 2010-03-11 | Virginia Tech Intellectual Properties, Inc. | Intramedullary nail targeting device |
| US8597316B2 (en) * | 2008-09-05 | 2013-12-03 | Stryker Corporation | Cutting accessory for use with a medical/surgical powered handpiece, the accessory having retention features that facilitate the fine or coarse adjustment of the extension of the accessory shaft |
| KR101005952B1 (ko) | 2008-11-06 | 2011-01-12 | 우재현 | 천공 깊이 조절 가능한 골 천공 드릴 |
| CA2646110A1 (en) | 2008-11-21 | 2010-05-21 | Ramon B. Gustilo | Bone drill devices, systems and methods |
| US8075313B2 (en) | 2009-01-19 | 2011-12-13 | Aeton Medical Llc | Transfer copings and related methods for taking implant impressions |
| CN101530341A (zh) | 2009-04-20 | 2009-09-16 | 马秋野 | 一种智能骨钻及其控制方法 |
| CN102510738B (zh) * | 2009-08-26 | 2015-07-08 | 史赛克爱尔兰公司 | 带肋的外科钻 |
| US8480682B2 (en) | 2009-08-28 | 2013-07-09 | Zimmer Dental, Inc. | Device for limiting the drilling depth of a drill |
| NZ574949A (en) | 2010-01-12 | 2011-04-29 | Pranesh Kumar | Cannulated surgical drill with depth gauge |
| US8894654B2 (en) * | 2010-03-31 | 2014-11-25 | Smart Medical Devices, Inc. | Depth controllable and measurable medical driver devices and methods of use |
| US8603148B2 (en) | 2010-05-07 | 2013-12-10 | Raymond B. Raven, III | System for treating bone fractures |
| US8876444B1 (en) | 2010-06-02 | 2014-11-04 | Besarion Chanturidze | Depth limiting device for a boring tool |
| WO2012061733A1 (en) | 2010-11-04 | 2012-05-10 | Smith & Nephew, Inc. | Drill guide depth stop |
| CA2818573C (en) | 2010-12-24 | 2018-01-02 | Ao Technology Ag | Surgical instrument capable of measuring local mechanical resistance of a porous body |
| CN103492833B (zh) | 2011-02-18 | 2016-12-28 | 德普伊新特斯产品有限责任公司 | 具有集成的导航与制导系统的工具以及相关设备和方法 |
| US20140046332A1 (en) | 2011-04-28 | 2014-02-13 | Ayishwariya Premanathan | Stopping tool guides and combinations thereof with surgical guides, methods for manufacturing and uses thereof |
| DE102011050193A1 (de) * | 2011-05-06 | 2012-11-08 | Aesculap Ag | Chirurgisches Instrument, chirurgisches Handstück und chirurgisches Antriebssystem |
| TWI418327B (zh) | 2011-06-03 | 2013-12-11 | Kabo Tool Co | 醫療用電鑽 |
| DE102011111671B4 (de) | 2011-08-26 | 2013-08-22 | Roland-Klinik gGmbH | Bohrmaschine, insbesondere medizinische Bohrmaschine, und Bohrverfahren |
| EP2570097A1 (en) | 2011-09-14 | 2013-03-20 | Dentsply IH AB | A dental component, a dental fixture and a dental implant |
| US9204897B2 (en) | 2011-12-19 | 2015-12-08 | Zimmer, Inc. | Surgical cutting guide |
| GB201200005D0 (en) | 2012-01-01 | 2012-02-15 | Thomas Rolf L | Medical device for controlled tissue penetration and uses thereof |
| US8970207B2 (en) | 2012-05-16 | 2015-03-03 | DePuy Synthes Products, LLC | Device for measuring drill bit displacement |
| US9572589B2 (en) | 2012-07-10 | 2017-02-21 | Stryker European Holdings I, Llc | Drill guide |
| JP6339080B2 (ja) * | 2012-09-14 | 2018-06-06 | シンセス・ゲーエムベーハーSynthes GmbH | 保護スリーブを有する多穴ドリルスリーブ |
| JP2014065135A (ja) * | 2012-09-25 | 2014-04-17 | Yunika Kk | ドリルビット付属工具 |
| US9277926B2 (en) | 2012-10-24 | 2016-03-08 | Wisconsin Alumni Research Foundation | Drill sleeve |
| US9320527B2 (en) * | 2013-01-18 | 2016-04-26 | Biomet Manufacturing, Llc | Quick-connect anti-rotation peg/drill bit component |
| US9345487B2 (en) | 2013-02-05 | 2016-05-24 | Path Scientific, Llc | Precision bone drill and method of use |
| CA2902238A1 (en) | 2013-03-15 | 2014-09-18 | Stryker Corporation | End effector of a surgical robotic manipulator |
| US9526509B2 (en) * | 2013-04-25 | 2016-12-27 | Medtronic Xomed, Inc. | Dynamic locking device |
| US9956677B2 (en) | 2013-05-08 | 2018-05-01 | Black & Decker Inc. | Power tool with interchangeable power heads |
| WO2015006296A1 (en) | 2013-07-09 | 2015-01-15 | Stryker Corporation | Surgical drill having brake that, upon the drill bit penetrating through bone, prevents further insertion of the drill bit |
| US9370372B2 (en) | 2013-09-04 | 2016-06-21 | Mcginley Engineered Solutions, Llc | Drill bit penetration measurement systems and methods |
| US9833270B2 (en) | 2013-09-19 | 2017-12-05 | Mcginley Engineered Solutions, Llc | Variable angle blade plate system and method |
| AU2014346458B2 (en) | 2013-11-08 | 2018-11-29 | Mcginley Engineered Solutions, Llc | Surgical saw with sensing technology for determining cut through of bone and depth of the saw blade during surgery |
| USD719594S1 (en) | 2013-11-15 | 2014-12-16 | Mcginley Engineered Solutions, Llc | Drill bit assembly |
| USD722627S1 (en) | 2013-11-15 | 2015-02-17 | Mcginley Engineered Solutions Llc | Drill bit penetration measurement system control housing |
| USD759244S1 (en) | 2013-11-15 | 2016-06-14 | Mcginley Engineered Solutions, Llc | Drill |
| USD759245S1 (en) | 2013-11-15 | 2016-06-14 | Mcginley Engineered Solutions, Llc | Drill assembly |
| WO2015168359A1 (en) * | 2014-04-30 | 2015-11-05 | Gyrus Acmi, Inc., D.B.A. Olympus Surgical | Rotary tool with improved coupling assembly |
| US10271888B2 (en) * | 2014-06-30 | 2019-04-30 | DePuy Synthes Products, Inc. | Hex screwdriver handle |
| USD732364S1 (en) | 2014-07-02 | 2015-06-23 | Mcginley Engineered Solutions, Llc | Removable chuck |
| AU2015298611B2 (en) * | 2014-08-06 | 2020-01-30 | Stryker Corporation | Powered surgical handpiece with a chuck that facilitates alignment of the cutting accessory fitted to the tool |
| EP3188671A4 (en) | 2014-09-05 | 2018-03-14 | Mcginley Engineered Solutions LLC | Instrument leading edge measurement system and method |
| US9763680B2 (en) * | 2014-09-12 | 2017-09-19 | Biomet Manufacturing, Llc | Interchangeable drill bits for drill assembly |
| EP3197374A4 (en) | 2014-09-25 | 2018-06-13 | David G. Matsuura | Drill depth measuring devices and methods |
| WO2016081604A2 (en) | 2014-11-19 | 2016-05-26 | Stryker Corporation | Surgical wire driver capable of automatically adjusting for the diameter of the wire or pin being driven |
| US20160192974A1 (en) | 2015-01-02 | 2016-07-07 | Michael Clain | Ultrasonic depth gauge |
| CN204394613U (zh) | 2015-01-07 | 2015-06-17 | 华中科技大学同济医学院附属同济医院 | 一种外科用钻头限深装置 |
| CN107530092B (zh) | 2015-01-21 | 2020-10-16 | 索特瑞工业有限责任公司 | 手术钻机 |
| US10080579B2 (en) * | 2015-03-25 | 2018-09-25 | Medtronic Ps Medical, Inc. | Pin drive rotary surgical cutting tools and powered handpieces |
| WO2016199152A1 (en) * | 2015-06-10 | 2016-12-15 | OrthoDrill Medical Ltd. | A device for modifying the operation of surgical bone tools and/or methods thereof |
| EP4245231A3 (en) | 2015-09-03 | 2023-11-29 | Stryker Corporation | Powered surgical drill with integral depth gauge that includes a probe that slides over the drill bit |
| US10363050B2 (en) | 2015-10-27 | 2019-07-30 | Mcginley Engineered Solutions, Llc | Variable diameter drill bit guide |
| WO2017075044A1 (en) | 2015-10-27 | 2017-05-04 | Mcginley Engineered Solutions, Llc | Unicortical path detection for a surgical depth measurement system |
| US10390869B2 (en) | 2015-10-27 | 2019-08-27 | Mcginley Engineered Solutions, Llc | Techniques and instruments for placement of orthopedic implants relative to bone features |
| US10321920B2 (en) | 2015-11-06 | 2019-06-18 | Mcginley Engineered Solutions, Llc | Measurement system for use with surgical burr instrument |
| WO2017083989A1 (en) * | 2015-11-16 | 2017-05-26 | Ao Technology Ag | Surgical power drill including a measuring unit suitable for bone screw length determination |
| WO2017139674A1 (en) * | 2016-02-12 | 2017-08-17 | Smart Medical Devices, Inc. | Driving devices and methods for determining material strength in real-time |
| EP4289388A3 (en) | 2017-08-17 | 2024-02-14 | Stryker Corporation | Surgical handpiece for measuring depth of bore holes and related accessories |
| US10159495B1 (en) | 2017-08-21 | 2018-12-25 | Stryker Corporation | Drill bit for a handheld surgical instrument |
-
2018
- 2018-08-17 EP EP23206302.4A patent/EP4289388A3/en active Pending
- 2018-08-17 AU AU2018316833A patent/AU2018316833B2/en active Active
- 2018-08-17 JP JP2020508987A patent/JP7198271B2/ja active Active
- 2018-08-17 CN CN201880067227.4A patent/CN111246810B/zh active Active
- 2018-08-17 CA CA3073178A patent/CA3073178A1/en active Pending
- 2018-08-17 EP EP18769497.1A patent/EP3668423B1/en active Active
- 2018-08-17 US US16/639,690 patent/US11317927B2/en active Active
- 2018-08-17 KR KR1020207007654A patent/KR20200042506A/ko not_active Ceased
- 2018-08-17 WO PCT/IB2018/056251 patent/WO2019035096A1/en not_active Ceased
- 2018-08-17 CN CN202310687183.8A patent/CN116602730A/zh active Pending
- 2018-08-17 BR BR112020003186-0A patent/BR112020003186A2/pt not_active IP Right Cessation
-
2022
- 2022-12-16 JP JP2022201298A patent/JP7568703B2/ja active Active
-
2024
- 2024-09-13 AU AU2024219708A patent/AU2024219708A1/en active Pending
- 2024-10-03 JP JP2024174346A patent/JP2025013819A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230019958A (ko) * | 2020-07-07 | 2023-02-09 | 비엔-에어 홀딩 에스에이 | 수술용 마이크로모터 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019035096A1 (en) | 2019-02-21 |
| AU2018316833A1 (en) | 2020-03-05 |
| EP3668423A1 (en) | 2020-06-24 |
| JP7198271B2 (ja) | 2022-12-28 |
| JP7568703B2 (ja) | 2024-10-16 |
| US20210186524A1 (en) | 2021-06-24 |
| JP2025013819A (ja) | 2025-01-28 |
| CA3073178A1 (en) | 2019-02-21 |
| EP4289388A3 (en) | 2024-02-14 |
| JP2020531103A (ja) | 2020-11-05 |
| CN111246810B (zh) | 2023-07-04 |
| CN116602730A (zh) | 2023-08-18 |
| AU2018316833B2 (en) | 2024-06-13 |
| CN111246810A (zh) | 2020-06-05 |
| US11317927B2 (en) | 2022-05-03 |
| AU2024219708A1 (en) | 2024-10-03 |
| JP2023040019A (ja) | 2023-03-22 |
| EP3668423B1 (en) | 2023-11-01 |
| BR112020003186A2 (pt) | 2020-09-15 |
| EP4289388A2 (en) | 2023-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7568703B2 (ja) | 穿孔の深さを測定可能な手術用ハンドピースおよび関連付属品 | |
| US12357322B2 (en) | Surgical handpiece assembly and related accessories | |
| US10952726B2 (en) | Handheld electromechanical surgical instruments | |
| EP1803406B1 (en) | Handle assembly for powered surgical apparatus | |
| US12226109B2 (en) | Powered surgical drill having transducer assembly including at least two rotation sensor devices for use in determining bore depth of a drilled hole | |
| US10617486B2 (en) | Manual retraction tool for use with an electromechanical surgical device | |
| JP2021171647A (ja) | 組織切除器具 | |
| US20250221718A1 (en) | Powered Surgical Drill Having A Depth Measurement Extension | |
| US11660712B1 (en) | Method of assembling a measurement module for a surgical handpiece system | |
| CN224056024U (zh) | 一种电动吻合器复用机构 | |
| KR102194506B1 (ko) | 콘트라앵글 핸드피스 | |
| CN118216972A (zh) | 一种一次性无菌转向钻头 | |
| CN121081039A (zh) | 多层同轴嵌套手术工具用的模块化旋进动力装置和运动序列配置方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200316 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210810 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230620 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230823 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20230620 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |