KR20200043048A - 초음파 영상 장치 및 그 제어 방법 - Google Patents
초음파 영상 장치 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20200043048A KR20200043048A KR1020180123622A KR20180123622A KR20200043048A KR 20200043048 A KR20200043048 A KR 20200043048A KR 1020180123622 A KR1020180123622 A KR 1020180123622A KR 20180123622 A KR20180123622 A KR 20180123622A KR 20200043048 A KR20200043048 A KR 20200043048A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- signal
- contrast agent
- tissue
- imaging apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/481—Diagnostic techniques involving the use of contrast agents, e.g. microbubbles introduced into the bloodstream
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5223—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for extracting a diagnostic or physiological parameter from medical diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5246—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from the same or different imaging techniques, e.g. color Doppler and B-mode
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5269—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving detection or reduction of artifacts
- A61B8/5276—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving detection or reduction of artifacts due to motion
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Hematology (AREA)
- Physiology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
개시된 일 측면에 따른 초음파 영상 장치는 대상체에 초음파 신호를 송신하고, 대상체로부터 에코 신호를 수신하는 초음파 프로브; 대상체에 유입된 조영제를 파괴하는 음향 에너지(acoustic energy)를 송신하는 조영제 파괴부; 대상체에 유입된 조영제가 파괴되기 전에, 수신된 에코 신호에 기초하여 조영제 신호와 조직 신호를 포함하는 제1 영상을 획득하고, 조영제가 파괴된 후에, 수신된 에코 신호에 기초하여 조직 신호를 포함하는 제2 영상을 획득하고, 제1 영상과 제2 영상의 차 연산에 기초하여 제3 영상을 생성하는 제어부;를 포함할 수 있다.
Description
초음파를 이용하여 대상체 내부 영상을 획득하는 초음파 영상 장치 및 그 제어 방법에 관한 것이다.
초음파 영상 장치는 프로브(probe)의 트랜스 듀서(transducer)로부터 생성되는 초음파 신호를 대상체로 조사하고, 대상체로부터 반사된 에코 신호의 정보를 이용하여 대상체 내부의 관한 영상을 획득한다. 여기서, 획득된 영상은 대상체의 조직, 조직간의 공간 및 이물질에서 반사된 다양한 반사 신호에 따라 생성될 수 있다.
한편, 최근에는 조영제(Contrast Agents)가 초음파 영상 장치에 응용되고 있다. 조영제는 대상체에 주입되어 대상체의 조직과 조직간의 공간 간의 대조도를 향상시켜 정밀한 초음파 영상을 제공하기 위하여 사용된다.
별도의 조직 영상을 획득하지 않고서도 조영제 영상에서 노이즈 신호를 효과적으로 제거할 수 있는 초음파 영상 장치 및 그 제어 방법을 제공한다.
상술한 기술적 과제를 해결하기 위한 본 발명의 일 실시예에 따른 초음파 영상 장치는 대상체에 관한 신호를 수신하는 프로브; 상기 대상체에 유입된 조영제가 파괴되기 전의 영상이고, 조영제 신호와 조직 신호를 포함하는 제1 영상을 획득하고, 상기 조영제가 파괴된 후의 영상이고, 조직 신호를 포함하는 제2 영상을 획득하고, 상기 제1 영상과 상기 제2 영상의 차 연산에 기초하여 제3 영상을 생성하는 제어부;를 포함한다.
일 실시예에서, 상기 제3 영상은, 상기 조직 신호 및 상기 제1 영상에 포함된 노이즈 신호 중 적어도 일부가 제거되고, 상기 조영제 신호를 포함하는 영상일 수 있다.
일 실시예에서, 상기 조영제 파괴부는, 상기 초음파 프로브, 본체 및 상기 본체의 외부 중 적어도 한곳에 마련될 수 있다.
일 실시예에서, 상기 조영제 파괴부는, 상기 음향 에너지의 송신 전압, 송신 주파수, 송신 영역의 직경, 송신 영역의 패턴, 송신 영역의 초점 중 적어도 하나를 조절할 수 있다.
일 실시예에서, 상기 송신 영역의 패턴은, 상기 초음파 프로브에 마련된 압전체는 적어도 하나 이상의 엘리먼트 단위로 음향 에너지를 발생하도록 할 수 있다.
일 실시예에서, 상기 제어부는, 상기 제1 영상과 상기 제2 영상 간의 사칙 연산, 논리 연산 및 룩업 테이블을 이용한 맵핑 중 적어도 하나를 이용한 연산을 수행할 수 있다.
일 실시예에서, 상기 제어부는, 상기 제1 영상에서 상기 제2 영상에 대응되는 조직 신호를 제외하는 차 연산을 수행한 결과에 따라 상기 제3 영상을 생성할 수 있다.
일 실시예에서, 상기 제어부는, 상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행하고, 상기 제1 영상은 제1 조영제 신호, 제2 조영제 신호, 조직 신호 및 노이즈 신호를 포함하고, 상기 제2 영상은 상기 송신된 음향 에너지에 의해 불완전 제거된 상기 제2 조영제 신호의 잔류 신호, 조직 신호 및 노이즈 신호를 포함하고, 상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행한 결과, 상기 조직 신호 및 상기 노이즈 신호의 적어도 일부가 제거되고, 상기 제1 조영제 신호 및 상기 제2 조영제 신호의 일부가 되는 제3 영상을 생성할 수 있다.
일 실시예에서, 상기 제어부는, 상기 제3 영상에 포함된 상기 제2 조영제 신호의 일부를 상기 제3 영상에 포함된 제1 조영제 신호에 맞도록 보정할 수 있다.
일 실시예에서, 상기 제어부는, 상기 제1 영상에 상기 제3 영상에 대응되는 신호의 강도를 가산하여 제4 영상을 생성할 수 있다.
일 실시예에서, 상기 제어부는, 상기 연산 전에 상기 제1 영상과 상기 제2 영상 간의 상관도를 높이도록 움직임 보정(Motion Correction)의 전 처리를 수행할 수 있다.
일 실시예에서, 상기 제어부는, 상기 제1 영상 및 상기 제2 영상 중 적어도 하나에 가중치를 설정하고, 상기 가중치를 조정할 수 있다.
일 실시예에서, 상기 제어부는, 상기 제4 영상에 포함되는 조영제 신호의 강도를 오프셋 및 임의의 N 값으로 나누어 조정할 수 있다.
상술한 기술적 과제를 해결하기 위한 본 발명의 다른 실시예에 따른 초음파 영상 장치에 의해 수행되는 제어 방법은, 조영제가 유입된 대상체의 조직 신호 및 조영제 신호를 포함하는 제1 영상을 획득하는 단계; 상기 조영제를 파괴하는 음향 에너지를 상기 대상체에 송신하고, 상기 조영제 신호가 감쇠된 제2 영상을 획득하는 단계; 상기 제1 영상과 상기 제2 영상 간의 차 연산 결과에 따른 제3 영상을 생성하는 단계;를 포함한다.
일 실시예에서, 상기 제3 영상을 생성하는 단계는, 상기 제1 영상에서 상기 제2 영상에 대응되는 조직 신호 및 노이즈 신호를 제외하는 차 연산을 수행한 결과에 따라 상기 제3 영상을 생성하는 단계;를 포함할 수 있다.
일 실시예에서, 상기 제3 영상을 생성하는 단계는, 상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행하고, 상기 제1 영상은 제1 조영제 신호, 제2 조영제 신호, 조직 신호 및 노이즈 신호를 포함하고, 상기 제2 영상은 상기 송신된 음향 에너지에 의해 불완전 제거된 상기 제2 조영제 신호의 잔류 신호, 조직 신호 및 노이즈 신호를 포함하고, 상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행한 결과, 상기 조직 신호 및 노이즈 신호의 적어도 일부가 제거되고, 상기 제1 조영제 신호 및 상기 제2 조영제 신호의 일부를 포함하는 제3 영상을 생성하는 단계;를 포함할 수 있다.
일 실시예에서, 상기 제3 영상을 생성하는 단계는, 상기 제3 영상에 포함된 상기 제2 조영제 신호의 일부를 상기 제3 영상에 포함된 제1 조영제 신호에 맞도록 보정하는 단계;를 포함할 수 있다.
일 실시예에서, 상기 제3 영상을 생성하는 단계는, 상기 제1 영상에 상기 제3 영상에 대응되는 신호의 강도를 가산하여 제4 영상을 생성하는 단계;를 포함할 수 있다.
일 실시예에서, 상기 제3 영상을 생성하는 단계는, 상기 연산 전에 상기 제1 영상과 상기 제2 영상 간의 상관도를 높이도록 움직임 보정(Motion Correction)의 전 처리를 수행하는 단계;를 포함할 수 있다.
일 실시예에서, 상기 제3 영상을 생성하는 단계는, 상기 제1 영상 및 상기 제2 영상 중 적어도 하나에 가중치를 설정하고, 상기 가중치를 조정하는 단계;를 포함할 수 있다.
상술한 본 발명에 따르면, 별도의 해부학 지식이 없이도, 초음파 영상에서 진단에 필요한 조영제 영상을 효율적으로 획득할 수 있다.
도 1은 초음파 영상 장치의 조영제 진단 모드를 설명하기 위한 도면이다.
도 2는 조영제 영상을 획득하는 과정을 설명하기 위한 도면이다.
도 3은 일 실시예에 따른 초음파 영상 장치의 외관도이다.
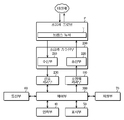
도 4는 일 실시예에 따른 초음파 영상 장치의 제어 블록도이다.
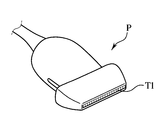
도 5는 일 실시예에 따른 초음파 프로브의 외관도이다.
도 6은 다른 실시예에 따른 초음파 프로브의 외관도이다.
도 7은 일 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다.
도 8은 다른 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다.
도 9는 또 다른 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다.
도 10은 일 실시예에 따른 초음파 영상 제어 방법의 순서도이다.
도 2는 조영제 영상을 획득하는 과정을 설명하기 위한 도면이다.
도 3은 일 실시예에 따른 초음파 영상 장치의 외관도이다.
도 4는 일 실시예에 따른 초음파 영상 장치의 제어 블록도이다.
도 5는 일 실시예에 따른 초음파 프로브의 외관도이다.
도 6은 다른 실시예에 따른 초음파 프로브의 외관도이다.
도 7은 일 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다.
도 8은 다른 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다.
도 9는 또 다른 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다.
도 10은 일 실시예에 따른 초음파 영상 제어 방법의 순서도이다.
이하, 첨부된 도면을 참조하여 본 발명의 바람직한 실시예들을 상세히 설명한다. 본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하고, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성 요소를 지칭한다.
다른 정의가 없다면, 본 명세서에서 사용되는 모든 용어(기술 및 과학적 용어를 포함)는 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 공통적으로 이해될 수 있는 의미로 사용될 수 있다. 또 일반적으로 사용되는 사전에 정의되어 있는 용어들은 명백하게 특별히 정의되어 있지 않는 한 이상적으로 또는 과도하게 해석되지 않는다. 본 명세서에서 사용된 용어는 실시예들을 설명하기 위한 것이며 본 발명을 제한하고자 하는 것은 아니다. 본 명세서에서, 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다.
명세서에서 사용되는 "포함한다 (comprises)" 및/또는 "포함하는 (comprising)"은 언급된 구성 요소, 단계, 동작 및/또는 소자는 하나 이상의 다른 구성 요소, 단계, 동작 및/또는 소자의 존재 또는 추가를 배제하지 않는다.
본 명세서에 대한 설명에 앞서, 본 명세서에서 사용되는 몇몇 용어들에 대하여 명확하게 하기로 한다.
"대상체"(object)는 사람 또는 동물, 또는 사람 또는 동물의 일부를 포함할 수 있다. 예를 들어, 대상체는 간, 심장, 자궁, 뇌, 유방, 복부 등의 장기 또는 혈관을 포함할 수 있다.
또한, 본 명세서에서, "초음파 영상"이란 초음파를 이용하여 획득한 대상체에 대한 영상을 의미한다. 이때, 초음파 영상은 2D 또는 3D 이미지일 수 있다. 또한, 초음파 영상은 대상체의 검사 부위의 해부학적 구조를 보여주는 조직 영상과 검사 부위의 조영제를 보여주는 조영제 영상을 포함할 수 있다.
초음파 조영제(ultrasound contrast agent, 이하, 조영제로 명함.)는 에코 신호가 약하여 초음파 영상을 획득하기 어려운 곳, 예를 들어, 대상체 깊이 있는 혈관, 작은 병변 등의 에코 신호를 강화한다. 조영제는 대상체의 혈관을 통해 주입되어, 혈관을 타고 대상체 내부에서 이동한다. 조영제는 초음파가 조사되면 비선형 운동을 하거나, 붕괴되면서 후방산란(backscatter)을 만들어 낸다. 초음파 영상 장치는 이와 같은 후방산란을 이용하여 조영제 영상으로 생성할 수 있다.
구체적으로, 조영제는 입자의 크기에 따라 마이크로파티클 조영제(microparticle contrast agent) 및 나노파티클 조영제(nanopartcle contrast agent)를 포함할 수 있다. 예를 들어, 마이크로파티클 조영제로는 마이크로버블(Microbubble)일 수 있다. 마이크로버블은 1-4㎛의 크기를 가질 수 있다. 마이크로버블은 과불화탄소(perfluorocarbon; PFC)와 같은 가스를 감싸는 인지질막으로 구성될 수 있다. 또한, 나노파티클 조영제로는 PFC 나노드롭렛(perfluorocarbon nanodroplet; PFC nanodroplet), PLA 나노버블(PLA nanobubble)일 수 있다. PFC 나노드롭렛은 200~400㎚의 크기를 가지며, PLA 나노버블은 40-200㎚의 크기를 가질 수 있다.
이하, 첨부된 도면들을 참조하여 본 발명의 작용 원리 및 실시예들에 대해 설명한다. 우선, 도 1 내지 도 2를 참조하여 일반적인 조영제 영상 생성 방식을 설명한다.
도 1은 조영제 진단 모드에서의 일반적인 초음파 영상이다. (a) 영상은 조영제 신호를 위주로 나타내는 영상이고, (b) 영상은 조직 신호를 위주로 나타내는 영상이다. 여기서, 각각의 영상은 조영제 신호와 조직 신호를 동시에 출력할 수 있으나, 신호의 강도 및 분포가 다르므로 출력되는 영상의 특성은 다르다. 또한, 조직 신호는 시간에 따른 변화 없이 동일한 밝기로 표시되는 반면, 조영제 신호는 시간에 따라 밝기의 변화가 발생한다.
조영제 영상은 미세 기포로 구성된 조영제가 낮은 송신 음압(acoustic pressure)에서도 일반 조직보다 큰 반응 신호를 발생하는 점을 이용하여, 낮은 송신 음압을 인가하여도 조영제 신호는 최대한 발생시키고, 조직 신호는 최소화할 수 있다. 따라서, 조영제 영상은 조영제의 유무에 따라 보여지는 특성이 매우 상이하다. 조영제 영상은 조영제가 주입되기 전이나 조영제가 소멸된 후에는 신호가 부족하여 검은 바탕 화면 또는 일부 조직 신호 밖에 보여지지 않아 조영제 영상만으로는 병변의 위치를 특정하는데 어려움이 있다. 여기서, 도 1에 도시된 바와 같이, 조영제 영상과 동기화된 조직 영상을 나란히 제공하여 병변의 위치를 파악하는 방안이 있으나, 별도의 조직 영상을 위한 송수신 장치에 따른 비용 및 시간의 낭비가 발생한다.
한편, 조영제 영상에서는 조영제 신호뿐만 아니라 낮은 송신 음압에서도 제거되지 않고 남아있는 조직 신호의 성분들이 포함되어, 진단 성능을 떨어뜨리는 요인으로 작용한다.
조직 신호를 제거하고 조영제 신호를 영상화 하기 위한 방안으로서, 도 2와 같이 조영제 영상(1)과 조직 영상(2)의 차 영상을 이용하는 방안이 있다. 조영제 영상에 포함되어 있는 조직 신호들이 조직 영상의 조직 신호들과 해부학적으로 동일한 조직에 해당하므로, 결과적으로 조직 신호들이 제거되는 효과를 얻을 수 있다.
그러나, 상술한 방식은 조직 신호를 참조할 수 있는 별도의 조직 영상을 필요로 하는 단점이 있고, 이는 별도의 조직 영상을 표시하는 송수신 기법 및 영상을 구성 하기 위한 비용과 시간이 요구된다. 또한, 이러한 조직 영상이 있더라도 조직 영상에서 보여지는 조직 신호의 특성과 조영제 영상에서 보여지는 조직 신호의 특성이 다르기 때문에 조직 신호 제거 효과가 떨어진다. 영상 특성 관점에서 조영제 영상은 조영제 신호와 조직 신호를 구분하기 위해 특별히 고안된 송수신 기법을 사용하는 반면, 조직 영상에서는 조영제 신호와 조직 신호를 구분하지 않고 밝기 위주로 표시한다. 조직 영상은 조직 신호뿐만 아니라 조영제 신호도 포함하고 있어, 조영제 영상과 바로 차 영상을 구하게 되면 조직 신호와 함께 조영제 신호도 제거되는 부작용이 있다.
본 발명은 상술한 도 1 및 도 2의 문제점을 해결하기 위해 안출된 것으로서, 조영제 영상에서 진단에 방해가 되는 조직 신호의 적어도 일부를 제거할 수 있다. 구체적으로, 본 발명은 조영제가 파괴될 수 있는 높은 음향 에너지(acoustic energy)를 대상체에 인가함으로써, 조영제 신호만 제거된 조직 영상을 획득하여 진단 부위만이 출력되는 조영제 영상을 획득할 수 있도록 한다.
이하, 첨부된 도면을 참조하여 일 측면에 따른 초음파 장치 및 그 제어 방법에 관한 실시예를 상세하게 설명한다.
도 3은 일 실시예에 따른 초음파 영상 장치의 외관도이고, 도 4는 일 실시예에 따른 초음파 영상 장치의 제어 블록도이다.
도 3을 참조하면, 초음파 영상 장치(1)는 대상체에 초음파를 송신하고 대상체로부터 초음파 에코 신호를 수신하여 전기적 신호로 변환하는 초음파 프로브(P)와, 초음파 프로브(P)와 연결되며 입력부(40) 및 표시부(50)를 갖추고 초음파 영상을 표시하는 본체(M)를 포함한다.
초음파 프로브(P)는 케이블(5)을 통해 초음파 영상장치의 본체(M)와 연결되어 초음파 프로브(P)의 제어에 필요한 각종 신호를 입력 받거나, 초음파 프로브(P)가 수신한 초음파 에코 신호에 대응되는 아날로그 신호 또는 디지털 신호를 본체(M)로 전달할 수 있다. 그러나, 초음파 프로브(P)의 실시예가 이에 한정되는 것은 아니며, 무선 프로브(wireless probe)로 구현되어 초음파 프로브(P)와 본체(M) 사이에 형성된 네트워크를 통해 신호를 주고 받는 것도 가능하다. 또한, 초음파 프로브(P) 또는 본체(M)는 조영제 파괴부(110)가 마련되어 대상체에 유입된 조영제를 파괴하도록 음향 에너지를 송신할 수 있다.
조영제 파괴부(110)는 초음파 음압의 기계적 작용에 의해 대상체 내부에 유입된 조영제를 이루는 미세 기포를 파괴할 수 있다. 한편, 조영제 파괴부(110)는 음향 에너지의 송신 전압, 송신 주파수, 송신 영역의 직경, 송신 영역의 패턴, 송신 영역의 초점 중 적어도 어느 하나를 조절하여 음향 에너지의 값을 조절할 수 있다.
또한, 송신 영역의 패턴은 적어도 하나 이상의 엘리먼트 단위로 음향 에너지를 발생하도록 설계될 수 있다. 구체적으로, 초음파 프로브(P)에 마련된 압전체는 적어도 하나 이상의 엘리먼트 단위로 송신 신호를 발생하도록 할 수 있다.
케이블(5)의 일 측 말단은 초음파 프로브(P)와 연결되고, 타 측 말단에는 본체(M)의 슬롯(7)에 결합 또는 분리가 가능한 커넥터(6)가 마련될 수 있다. 본체(M)와 초음파 프로브(P)는 케이블(5)을 이용하여 제어 명령이나 데이터를 주고 받을 수 있다. 예를 들어, 사용자가 입력부(40)를 통해 초점 깊이, 어퍼쳐(aperture)의 크기나 형태 또는 스티어링 각도 등에 관한 정보를 입력하면, 이 정보들은 케이블(5)을 통해 초음파 프로브(P)로 전달되어 빔포밍 장치(미도시)에서 사용될 수 있다.
또는, 전술한 바와 같이 초음파 프로브(P)가 무선 프로브로 구현되는 경우에는, 초음파 프로브(P)는 케이블(5)이 아닌 무선 네트워크를 통해 본체(M)와 연결된다. 무선 네트워크를 통해 본체(M)와 연결되는 경우에도 본체(M)와 초음파 프로브(P)는 전술한 제어 명령이나 데이터를 주고 받을 수 있다.
도 4를 참조하면, 초음파 프로브(P)는 트랜스 듀서(T)를 포함할 수 있고, 본체(M)는 조영제 파괴부(110), 초음파 송수신부(200), 신호 처리부(230), 제어부(300), 조작 패널(40), 표시부(50), 통신부(60) 및 저장부(70)를 포함할 수 있다.
본체(M)의 구성에 대해 먼저 살펴보면, 제어부(300)는 초음파 영상 장치(1)의 전반적인 동작을 제어하고, 획득한 영상을 처리하는 작업 전반을 수행할 수 있다. 구체적으로, 제어부(300)는 조영제 파괴부(110), 초음파 송수신부(200), 신호 처리부(230) 및 표시부(50) 등을 제어할 수 있다.
신호 처리부(230)는 초음파 프로브(P)를 통해 집속된 초음파 신호를 신호 특성에 따라 구분할 수 있다. 예를 들어, 신호 처리부(230)는 신호 특성에 기초하여 대상체가 반사한 조직 신호, 노이즈 신호 및 조영제 신호 간의 구분을 할 수 있다. 또한, 신호 처리부(230)는 분류된 초음파 신호에 기초하여 대상체 내부의 목표 부위에 대한 코히런트(coherent) 2차원 영상 또는 3차원 영상을 생성할 수 있도록 한다.
또한, 신호 처리부(230)는 코히런트 영상 정보를 B-모드나 도플러 모드 등의 진단 모드에 따른 초음파 영상 정보로 변환할 수 있다. 예를 들면, 진단 모드가 B-모드로 설정되어 있는 경우, 신호 처리부(230)는 A/D 변환 처리 등의 처리를 행하고 B-모드 영상용의 초음파 영상 정보를 실시간으로 작성할 수 있다.
촬영 모드가 D-모드(도플러 모드)로 설정되어 있는 경우, 신호 처리부(230)는 초음파 신호로부터 위상 변화 정보를 추출하고, 속도, 파워, 분산과 같은 촬영 단면의 각 점에 대응하는 혈류 등의 정보를 산출하고 D-모드 영상용의 초음파 영상 정보를 실시간으로 작성할 수 있다.
입력부(40)는 사용자의 지시 또는 명령을 입력 받을 수 있고, 제어부(300)는 사용자가 입력한 명령에 따라 초음파 영상 장치(1)를 제어할 수 있다. 사용자는 입력부(40)를 통해 초음파 진단 시작 명령, A-모드(Amplitude mode), B-모드(Brightness mode), 컬러 모드(Color mode), D-모드(Doppler mode) 및 M-모드(Motion mode) 등의 진단 모드 선택 명령, 관심영역(region of interest; ROI)의 크기 및 위치를 포함하는 관심영역(ROI) 설정 정보 등을 입력하거나 설정할 수 있다.
입력부(40)는 키보드, 마우스, 트랙볼(trackball), 태블릿(tablet) 또는 터치스크린 모듈 등과 같이 사용자가 데이터, 지시나 명령을 입력할 수 있는 다양한 수단을 포함할 수 있다.
표시부(50)는 초음파 진단에 필요한 메뉴나 안내 사항 및 초음파 진단 과정에서 획득한 초음파 영상 등을 표시할 수 있다. 표시부(50)에 표시되는 초음파 영상은 A-모드의 초음파 영상이나 B-모드의 초음파 영상일 수도 있고, 3차원 입체 초음파 영상일 수도 있다. 표시부(50)는 브라운관(Cathode Ray Tube; CRT), 액정 표시 장치(Liquid Crystal Display; LCD) 등 공지된 다양한 디스플레이 방식으로 구현될 수 있다. 여기서, 표시부(50)는 조직 신호가 제거되고 조영제 신호가 출력되는 제3 영상을 표시할 수 있다. 제3 영상에 관한 구체적인 특징에 관하여는 아래에서 설명하도록 한다.
다음으로, 초음파 프로브(P)의 구성에 관해 자세히 살펴본다. 트랜스 듀서 어레이(transducer array: TA)는 초음파 프로브(P)의 단부에 마련된다. 초음파 트랜스 듀서 어레이(TA)는 복수의 초음파 트랜스 듀서 엘리먼트(element)를 배열(array)상으로 배치한 것을 의미한다.
이때, 초음파 프로브(P)는 대상체의 내부로 초음파를 송신하기 위해 전기적 신호와 초음파 신호를 상호 변환하는 트랜스 듀서를 포함할 수 있다. 트랜스 듀서는 1차원 또는 2차원 트랜스 듀서 어레이(transducer array)로 구현될 수 있으며, 트랜스 듀서 어레이는 복수의 트랜스 듀서 엘리먼트(element)로 구성된다.
본체(M)는 조영제 파괴부(110)를 포함하고, 조영제 파괴부(110)는 송신부(220)의 전압의 크기, 주파수 및 패턴 중 적어도 하나를 조정하는 신호를 초음파 프로브(P)에 송신할 수 있다. 따라서, 초음파 프로브(P)는 대상체 진단을 위한 스캔 도중에도 대상체에 유입된 조영제를 파괴할 수 있다. 조영제 파괴부(110)는 초음파 프로브(P) 또는 본체(M)에 마련될 수 있다. 조영제 파괴부(110)는 초음파 영상 장치(1)와는 별개의 장치로서 대상체에 음향 에너지를 송신할 수 있는 기능을 구비한 장치일 수 있다.
예를 들어, 트랜스 듀서는 도 5에 도시된 바와 같이 1차원 어레이 트랜스 듀서(T1)를 포함할 수 있다. 다른 실시예로, 트랜스 듀서는 도 6에 도시된 바와 같이 2차원 어레이 트랜스 듀서(T2)를 포함할 수도 있다.
예를 들어, 1차원 어레이 트랜스 듀서를 구성하는 각각의 트랜스 듀서 엘리먼트는 초음파 신호와 전기 신호를 상호 변환시킬 수 있다. 이를 위해, 트랜스 듀서 엘리먼트는 자성체의 자왜효과를 이용하는 자왜 초음파 트랜스 듀서(Magnetostrictive Ultrasonic Transducer), 압전 물질의 압전 효과를 이용한 압전 초음파 트랜스 듀서(Piezoelectric Ultrasonic Transducer) 또는 압전형 미세가공 초음파 트랜스 듀서(piezoelectric micromachined ultrasonic transducer, pMUT) 등으로 구현될 수 있으며, 미세 가공된 수백 또는 수천 개의 박막의 진동을 이용하여 초음파를 송수신하는 정전용량형 미세가공 초음파 트랜스 듀서(Capacitive Micromachined Ultrasonic Transducer, 이하 cMUT으로 약칭한다)로 구현되는 것도 가능하다.
한편, 트랜스 듀서는 선형(linear)으로 배열되는 것도 가능하고, 곡면(convex)으로 배열되는 것도 가능하다. 두 경우 모두 초음파 프로브(P)의 기본적인 동작 원리는 동일하나, 트랜스 듀서가 곡면으로 배열된 초음파 프로브(P)의 경우에는 트랜스 듀서로부터 조사되는 초음파가 부채꼴 모양이기 때문에, 생성되는 초음파 영상도 부채꼴 모양이 될 수 있다.
도 6을 참조하면, 초음파 프로브(P)의 트랜스 듀서는 전술한 바와 같이 2차원 트랜스 듀서 어레이(T2)를 포함할 수도 있다. 2차원 트랜스 듀서 어레이(T2)를 포함하는 경우에는 대상체의 내부를 3차원 영상화할 수 있다.
2 차원 어레이 트랜스 듀서를 구성하는 각각의 트랜스 듀서 엘리먼트는 1차원 트랜스 듀서 어레이를 구성하는 트랜스 듀서 엘리먼트와 동일하므로, 자세한 설명은 생략하도록 한다.
도 7은 일 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다. 본 실시예에 따라 생성된 영상은, 조영제 파괴 전후 영상 간의 차 연산을 수행하여 조직 신호(T) 및 노이즈 신호(N)가 제거된 영상이다.
제1 영상은 일반적인 조영제 영상을 가리킨다. 구체적으로, 제1 영상은 대상체에 조영제가 유입되고, 조영제가 파괴되기 전에 획득된 영상이다. 여기서, 제1 영상은 조영제 신호(C) 이외에도, 낮은 송신 음압에서도 제거되지 않고, 반사되는 조직 신호(T), 노이즈 신호(N)를 포함한다. 다만, 조직 신호(T) 및 노이즈 신호(N)는 조영제 신호(C)와 구분이 명확하지 않으므로 진단 성능을 떨어뜨리는 요인이 될 수 있다.
따라서, 조영제 파괴부는 조영제 신호가 제거된 제2 영상을 획득하기 위하여, 조영제가 유입된 대상체 부위에 음향 에너지(acoustic energy)를 송신할 수 있다. 제2 영상은 대상체에 유입된 조영제가 음향 에너지에 의하여 파괴된 후에 획득된 영상이다. 제2 영상은 조직 신호(T) 및 노이즈 신호(N) 중 적어도 하나 이상을 포함하는 영상을 가리킨다.
상술한 과정을 통하여 제1 영상 및 제2 영상을 획득하면, 제1 영상과 제2 영상간의 연산을 수행한다. 구체적으로, 제1 영상과 제2 영상 간의 연산은 서로 대응되는 신호를 상쇄하기 위한 차 연산에 해당할 수 있다. 여기서, 대응되는 신호는 조직 신호(T) 및 노이즈 신호(N) 중 적어도 하나 이상일 수 있다. 따라서, 제1 영상과 제2 영상 간의 연산 결과 생성된 제3 영상에는 조영제 신호(C)가 주로 출력된다.
한편, 제어부는 제3 영상을 획득하기 위하여 다양한 연산을 수행할 수 있다. 예를 들어, 제1 영상과 제2 영상 간의 데이터를 이용하여, 사칙 연산, 논리 연산 및 룩업 테이블을 이용한 맵핑 등을 수행하여 제3 영상을 생성할 수 있다.
구체적으로, 제어부는 제1 영상에서 제2 영상에 대응되는 신호를 제외하는 차 연산을 수행하여 제3 영상을 생성할 수 있다. 여기서, 대응되는 신호는 제1 영상 및 제2 영상에 공통된 신호인 조직 신호 및 노이즈 신호 중 적어도 하나를 가리킬 수 있다. 따라서, 제3 영상은 조직 신호 및 노이즈 신호가 제거된 상태로 조영제 영상만을 확인할 수 있도록 표시부에 제공될 수 있다.
일 실시예에서, 조영제 파괴부는 대상체에 유입된 조영제를 파괴하기 위하여 음향 에너지를 송신할 수 있다. 여기서, 송신되는 음향 에너지는, 대상체에 유입된 조영제에 따라 값이 상이할 수 있다. 제어부는 대상체에서 반사된 조직 신호와 조영제 신호가 출력되는 제1 영상과 송신된 음향 에너지에 의해 조영제 신호가 감쇠 또는 제거된 제2 영상 간의 차 연산을 수행하여 제3 영상을 생성할 수 있다. 여기서, 제3 영상은 초음파 진단 과정에서 관심 대상인 조영제 신호만 출력되는 영상을 가리킨다.
도 8은 다른 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다. 도 8은 도 7과 달리, 2차원 영상이 아닌 3차원 영상에서 조영제 영상을 생성하는 과정에 관한 것이다. 예를 들어, 본 실시예에 따르면, 자궁난관조영술(HyCoSy)의 3 차원 영상은 노이즈 신호 및 조직 신호가 제거된 상태로 사용자에게 진단 영상을 제공할 수 있으므로, 난관의 막힘 등을 확인하는데 용이하다.
본 실시예에 따른 제1 영상은 입체 스캐닝을 통하여 얻은 영상에 해당한다. 기존에는 제1 영상에서 조직 신호 및 노이즈 신호를 제거하기 위한 방안으로 볼륨 데이터 상에서 육안으로 구분하여 제거하였다. 다만, 이는 사용자의 해부학적 지식이 요구되고, 이러한 작업에는 상당한 시간이 소요되었다. 예를 들어, 도 8에 도시된 제1 영상에 출력된 조직 신호(T)를 출력된 영상을 확인하여 직접 제거하는 별도의 작업이 필요하였다.
조영제 신호 및 조직 신호가 출력되는 제1 영상을 획득한 이후, 조영제 파괴부는 조영제 신호가 제거된 제2 영상을 획득하기 위하여, 조영제가 유입된 대상체 부위에 음향 에너지(acoustic energy)를 송신할 수 있다. 이 때, 3차원 영상에서 분포된 조영제를 제거하기 위하여 대상체의 형상에 따라 조영제를 파괴한다.
상술한 과정을 통하여 제1 영상 및 제2 영상을 획득하면, 제1 영상과 제2 영상 간의 연산을 수행한다. 구체적으로, 제1 영상과 제2 영상 간의 연산은 서로 대응되는 신호를 상쇄하기 위한 차 연산에 해당할 수 있다. 여기서, 대응되는 신호는 조직 신호(T) 및 노이즈 신호(N) 중 적어도 하나 이상일 수 있다. 따라서, 제1 영상과 제2 영상 간의 연산 결과 생성된 제3 영상에는 조영제 신호(C)가 주로 출력된다.
도 9는 또 다른 실시예에 따른 초음파 영상 획득 과정을 설명하기 위한 도면이다. 본 실시예에서는 대상체에 유입된 조영제 중 일부가 불완전 파괴된 경우에 본래의 영상과의 합 연산을 통해 조영제 신호의 밝기를 보상하는 것이다.
도 9의 제1 영상은 제1 조영제 신호, 제2 조영제 신호 및 노이즈 신호를 포함한다. 여기서, 제1 조영제 신호 및 제2 조영제 신호는 같은 대상체에서 반사된 조영제 신호에 해당하나, 위치에 따라 조영제의 파괴 정도가 다소 상이한 점에 따라 구분된 신호에 해당한다.
제1 영상을 획득한 후, 조영제 파괴부는 대상체에 음향 에너지를 송신하여 조영제를 파괴한다. 여기서, 제2 영상은 조영제가 불균일하게 파괴되어, 제1 조영제 신호는 모두 제거되었으나, 제2 조영제 신호는 불완전 제거된 제2 조영제 잔류 신호를 포함한다.
제1 영상과 제2 영상 간의 차 연산을 수행하여 제3 영상을 도출한다. 여기서 제3 영상에는 제1 조영제 신호가 그대로 포함되어 있고, 제2 조영제 신호는 제2 조영제 잔류 신호를 제외한 조영제 신호로 표시된다. 유의할 점은, 제1 영상 및 제2 영상에 포함된 조직 신호 또는 노이즈 신호는 음향 에너지에 의하여 파괴되지 않으므로, 제3 영상에서 조직 신호 또는 노이즈 신호는 표시되지 않는다. 결국, 제3 영상에는 조직 신호 및 노이즈 신호가 표시되지 않는 특성을 이용할 수 있다. 이 때, 감쇠된 제2 조영제 신호를 제1 조영제 신호에 맞추어 보정할 수 있으므로, 조영제가 불완전 파괴되어도 보상이 가능하다.
일 실시예에서, 제어부는 제1 영상과 제2 영상 간의 차 연산을 수행하고, 제1 영상과 제2 영상 간의 차 연산을 수행한 결과, 노이즈 신호가 제거되고, 제1 조영제 신호 및 제2 조영제 신호의 일부가 출력되는 제3 영상을 생성할 수 있다. 이때, 제1 영상은 제1 조영제 신호, 제2 조영제 신호 및 노이즈 신호를 포함하고, 제2 영상은 송신된 음향 에너지에 의해 불완전 제거된 제2 조영제 잔류 신호 및 노이즈 신호를 포함할 수 있다. 여기서, 제어부는 제3 영상에 출력된 제2 조영제 신호의 일부를 제3 영상에 출력된 제1 조영제 신호의 강도에 맞도록 보정할 수 있다. 따라서, 대상체에 유입된 조영제 일부가 불완전 파괴되어도 연산 과정을 통해 밝기를 보상할 수 있다.
또한, 제어부는 더 정확한 제3 영상을 생성하기 위하여, 차 연산을 수행하기 전에, 제1 영상 및 제2 영상 중 적어도 하나에 가중치를 설정하고, 가중치를 조정하는 과정을 수행할 수 있다. 여기서, 가중치는 영상에 포함하는 조직 신호, 노이즈 신호 및 조영제 신호 중 적어도 하나를 기준으로 설정될 수 있다.
도 10은 일 실시예에 따른 초음파 영상 제어 방법의 순서도이다. 단, 이는 본 발명의 목적을 달성하기 위한 바람직한 실시예일뿐이며, 필요에 따라 일부 단계가 추가되거나 삭제될 수 있음은 물론이다.
조영제가 유입된 대상체의 조직 신호 및 조영제 신호를 포함하는 제1 영상을 획득한다(1101). 여기서, 획득된 제1 영상은 조영제 신호가 제거된 제2 영상과 연산을 수행하기 위하여 저장부에 저장될 수 있다.
다음으로, 조영제 파괴부는, 대상체에 유입된 조영제를 파괴하는 음향 에너지를 대상체에 조사한다(1103). 이 때, 3 차원 영상을 획득하기 위한 작업인 경우, 음향 에너지를 대상체에 조사하는 스캔을 입체적으로 수행한다. 결과적으로, 제어부는 음향 에너지가 대상체에 조사되어 조영제가 파괴된 제2 영상을 획득한다. 제1 영상과 마찬가지로, 제2 영상도 제1 영상과 연산을 수행하기 위하여 저장부에 저장될 수 있다.
상기 제1 영상과 상기 제2 영상 간의 연산 결과에 따른 제3 영상을 생성한다(1105). 여기서, 제3 영상은 표시부에 단일 영상으로 출력될 수 있다.
이상 첨부된 도면을 참조하여 본 발명의 실시예들을 설명하였지만, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자는 본 발명이 그 기술적 사상이나 필수적인 특징을 변경하지 않고서 다른 구체적인 형태로 실시될 수 있다는 것을 이해할 수 있다. 그러므로 이상에서 기술한 실시예들은 모든 면에서 예시적인 것이며 한정적인 것이 아닌 것으로 이해해야만 한다.
Claims (20)
- 대상체에 초음파 신호를 송신하고, 상기 대상체로부터 에코 신호를 수신하는 초음파 프로브;
상기 대상체에 유입된 조영제를 파괴하는 음향 에너지(acoustic energy)를 송신하는 조영제 파괴부; 및
상기 대상체에 유입된 조영제가 파괴되기 전에, 상기 수신된 에코 신호에 기초하여 조영제 신호와 조직 신호를 포함하는 제1 영상을 획득하고, 상기 조영제가 파괴된 후에, 상기 수신된 에코 신호에 기초하여 상기 조직 신호를 포함하는 제2 영상을 획득하고, 상기 제1 영상과 상기 제2 영상의 차 연산에 기초하여 제3 영상을 생성하는 제어부;
를 포함하는 초음파 영상 장치. - 제 1 항에 있어서,
상기 제3 영상은,
상기 조직 신호 및 상기 제1 영상에 포함된 노이즈 신호 중 적어도 일부가 제거되고, 상기 조영제 신호를 포함하는 영상인 초음파 영상 장치. - 제 1 항에 있어서,
상기 조영제 파괴부는,
상기 초음파 프로브, 본체 및 상기 본체의 외부 중 적어도 한 곳에 마련되는 초음파 영상 장치. - 제 3 항에 있어서,
상기 조영제 파괴부는,
상기 음향 에너지의 송신 전압, 송신 주파수, 송신 영역의 직경, 송신 영역의 패턴, 송신 영역의 초점 중 적어도 하나를 조절하는 초음파 영상 장치. - 제 4 항에 있어서,
상기 송신 영역의 패턴은,
상기 초음파 프로브에 마련된 압전체는 적어도 하나 이상의 엘리먼트 단위로 음향 에너지를 발생하도록 하는 초음파 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 제1 영상과 상기 제2 영상 간의 사칙 연산, 논리 연산 및 룩업 테이블을 이용한 맵핑 중 적어도 하나를 이용한 연산을 수행하는 초음파 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 제1 영상에서 상기 제2 영상에 대응되는 조직 신호를 제외하는 차 연산을 수행한 결과에 따라 상기 제3 영상을 생성하는 초음파 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행하고,
상기 제1 영상은 제1 조영제 신호, 제2 조영제 신호, 조직 신호 및 노이즈 신호를 포함하고,
상기 제2 영상은 상기 송신된 음향 에너지에 의해 불완전 제거된 상기 제2 조영제 신호의 잔류 신호, 조직 신호 및 노이즈 신호를 포함하고,
상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행한 결과, 상기 조직 신호 및 상기 노이즈 신호의 적어도 일부가 제거되고, 상기 제1 조영제 신호 및 상기 제2 조영제 신호의 일부가 되는 제3 영상을 생성하는 초음파 영상 장치. - 제 8 항에 있어서,
상기 제어부는,
상기 제3 영상에 포함된 상기 제2 조영제 신호의 일부를 상기 제3 영상에 포함된 제1 조영제 신호에 맞도록 보정하는 초음파 영상 장치. - 제 8 항에 있어서,
상기 제어부는,
상기 제1 영상에 상기 제3 영상에 대응되는 신호의 강도를 가산하여 제4 영상을 생성하는 초음파 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 연산 전에 상기 제1 영상과 상기 제2 영상 간의 상관도를 높이도록 움직임 보정(Motion Correction)의 전 처리를 수행하는 초음파 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 제1 영상 및 상기 제2 영상 중 적어도 하나에 가중치를 설정하고, 상기 가중치를 조정하는 초음파 영상 장치. - 제 10 항에 있어서,
상기 제어부는,
상기 제4 영상에 포함되는 조영제 신호의 강도를 오프셋 및 임의의 N 값으로 나누어 조정하는 초음파 영상 장치. - 초음파 영상 장치에 의해 수행되는 제어 방법에 있어서,
조영제가 유입된 대상체의 조직 신호 및 조영제 신호를 포함하는 제1 영상을 획득하는 단계;
상기 조영제를 파괴하는 음향 에너지를 상기 대상체에 송신하고, 상기 조영제 신호가 감쇠된 제2 영상을 획득하는 단계; 및
상기 제1 영상과 상기 제2 영상 간의 차 연산 결과에 따른 제3 영상을 생성하는 단계;
를 포함하는 초음파 영상 장치의 제어 방법. - 제 14 항에 있어서,
상기 제3 영상을 생성하는 단계는,
상기 제1 영상에서 상기 제2 영상에 대응되는 조직 신호 및 노이즈 신호를 제외하는 차 연산을 수행한 결과에 따라 상기 제3 영상을 생성하는 단계;를 포함하는 초음파 영상 장치의 제어 방법. - 제 14 항에 있어서,
상기 제3 영상을 생성하는 단계는,
상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행하고,
상기 제1 영상은 제1 조영제 신호, 제2 조영제 신호, 조직 신호 및 노이즈 신호를 포함하고,
상기 제2 영상은 상기 송신된 음향 에너지에 의해 불완전 제거된 상기 제2 조영제 신호의 잔류 신호, 조직 신호 및 노이즈 신호를 포함하고,
상기 제1 영상과 상기 제2 영상 간의 차 연산을 수행한 결과, 상기 조직 신호 및 노이즈 신호의 적어도 일부가 제거되고, 상기 제1 조영제 신호 및 상기 제2 조영제 신호의 일부를 포함하는 제3 영상을 생성하는 단계;를 포함하는 초음파 영상 장치의 제어 방법. - 제 16 항에 있어서,
상기 제3 영상을 생성하는 단계는,
상기 제3 영상에 포함된 상기 제2 조영제 신호의 일부를 상기 제3 영상에 포함된 제1 조영제 신호에 맞도록 보정하는 단계;를 포함하는 초음파 영상 장치의 제어 방법. - 제 14 항에 있어서,
상기 제3 영상을 생성하는 단계는,
상기 제1 영상에 상기 제3 영상에 대응되는 신호의 강도를 가산하여 제4 영상을 생성하는 단계;를 포함하는 초음파 영상 장치의 제어 방법. - 제 14 항에 있어서,
상기 제3 영상을 생성하는 단계는,
상기 연산 전에 상기 제1 영상과 상기 제2 영상 간의 상관도를 높이도록 움직임 보정(Motion Correction)의 전 처리를 수행하는 단계;를 포함하는 초음파 영상 장치의 제어 방법. - 제 14 항에 있어서,
상기 제3 영상을 생성하는 단계는,
상기 제1 영상 및 상기 제2 영상 중 적어도 하나에 가중치를 설정하고, 상기 가중치를 조정하는 단계;를 포함하는 초음파 영상 장치의 제어 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180123622A KR20200043048A (ko) | 2018-10-17 | 2018-10-17 | 초음파 영상 장치 및 그 제어 방법 |
| US16/655,913 US20200121297A1 (en) | 2018-10-17 | 2019-10-17 | Ultrasound imaging apparatus and method of controlling the same |
| EP19203943.6A EP3639753A1 (en) | 2018-10-17 | 2019-10-17 | Ultrasound imaging apparatus and method of controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180123622A KR20200043048A (ko) | 2018-10-17 | 2018-10-17 | 초음파 영상 장치 및 그 제어 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200043048A true KR20200043048A (ko) | 2020-04-27 |
Family
ID=68296027
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180123622A Withdrawn KR20200043048A (ko) | 2018-10-17 | 2018-10-17 | 초음파 영상 장치 및 그 제어 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200121297A1 (ko) |
| EP (1) | EP3639753A1 (ko) |
| KR (1) | KR20200043048A (ko) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3905960B1 (en) * | 2019-01-03 | 2024-09-25 | Koninklijke Philips N.V. | Systems and methods for contrast enhanced imaging |
| CN116211350A (zh) * | 2021-12-03 | 2023-06-06 | 深圳迈瑞生物医疗电子股份有限公司 | 超声造影成像方法和超声成像系统 |
| CN218186818U (zh) * | 2022-04-08 | 2023-01-03 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声成像系统 |
| KR20250035233A (ko) * | 2023-09-05 | 2025-03-12 | 삼성메디슨 주식회사 | 초음파 영상 장치 및 그 동작 방법 |
| WO2025215181A1 (en) * | 2024-04-11 | 2025-10-16 | Iconeus | Method and apparatus of ultrasound contrast imaging |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6340348B1 (en) * | 1999-07-02 | 2002-01-22 | Acuson Corporation | Contrast agent imaging with destruction pulses in diagnostic medical ultrasound |
| KR102617894B1 (ko) * | 2015-11-05 | 2023-12-26 | 삼성메디슨 주식회사 | 초음파 진단 장치 및 초음파 영상을 생성하기 위한 방법 |
-
2018
- 2018-10-17 KR KR1020180123622A patent/KR20200043048A/ko not_active Withdrawn
-
2019
- 2019-10-17 EP EP19203943.6A patent/EP3639753A1/en not_active Withdrawn
- 2019-10-17 US US16/655,913 patent/US20200121297A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP3639753A1 (en) | 2020-04-22 |
| US20200121297A1 (en) | 2020-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9119558B2 (en) | Ultrasonic diagnostic apparatus and ultrasonic diagnostic method | |
| JP6288996B2 (ja) | 超音波診断装置及び超音波イメージングプログラム | |
| KR20200043048A (ko) | 초음파 영상 장치 및 그 제어 방법 | |
| KR20150070859A (ko) | 전단파를 이용하여 관심 영역에 대한 탄성 정보를 획득하는 방법 및 장치. | |
| JP6125256B2 (ja) | 超音波診断装置、画像処理装置及び画像処理プログラム | |
| CN102090901B (zh) | 医用图像显示装置 | |
| CN102133110A (zh) | 超声波诊断装置、医用图像诊断装置 | |
| JP6305718B2 (ja) | 超音波診断装置及び制御プログラム | |
| EP2052686B1 (en) | Ultrasonic diagnostic apparatus and control program thereof | |
| KR20160062874A (ko) | 프로브, 초음파 영상 장치 및 초음파 영상 장치의 제어 방법 | |
| KR20180070990A (ko) | 초음파 영상장치 및 그 제어방법 | |
| EP3364881B1 (en) | Ultrasound imaging apparatus and controlling method for the same | |
| JP5038289B2 (ja) | 位相収差訂正のためのマイクロバブル生成技術 | |
| JP7135051B2 (ja) | パルス波ドップラー撮像においてアーチファクト警告を自動的に提供するための方法およびシステム | |
| US10980517B2 (en) | Ultrasonic diagnostic apparatus for estimating position of probe and method for controlling the same | |
| KR20150044512A (ko) | 초음파 영상 장치 및 그 제어 방법 | |
| JP2012245092A (ja) | 超音波診断装置 | |
| KR20160022639A (ko) | 고조파 영상을 생성할 수 있는 초음파 진단 장치 및 고조파 영상을 포함하는 초음파 영상 생성 방법 | |
| Soler López et al. | Application of ultrasound in medicine Part II: the ultrasonic transducer and its associated electronics | |
| JP4762010B2 (ja) | 超音波診断装置およびその画像処理方法、その画像処理プログラム | |
| JP2008264254A (ja) | 医用画像診断装置、及び超音波撮影支援装置 | |
| JP2002224108A (ja) | 超音波撮影装置 | |
| Brumund et al. | Ultrasound of the Thyroid and Parathyroid Glands | |
| JP5490609B2 (ja) | 超音波診断装置 | |
| CN114641237A (zh) | 一种超声系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181017 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |