KR20200043251A - 생체 심부 조직의 미세 영상 획득 시스템 및 이의 미세 영상 제공 방법 - Google Patents
생체 심부 조직의 미세 영상 획득 시스템 및 이의 미세 영상 제공 방법 Download PDFInfo
- Publication number
- KR20200043251A KR20200043251A KR1020180155498A KR20180155498A KR20200043251A KR 20200043251 A KR20200043251 A KR 20200043251A KR 1020180155498 A KR1020180155498 A KR 1020180155498A KR 20180155498 A KR20180155498 A KR 20180155498A KR 20200043251 A KR20200043251 A KR 20200043251A
- Authority
- KR
- South Korea
- Prior art keywords
- probe
- image acquisition
- lens
- acquisition system
- endoscopic probe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0062—Arrangements for scanning
- A61B5/0068—Confocal scanning
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0036—Scanning details, e.g. scanning stages
- G02B21/0048—Scanning details, e.g. scanning stages scanning mirrors, e.g. rotating or galvanomirrors, MEMS mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2423—Optical details of the distal end
- G02B23/243—Objectives for endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00174—Optical arrangements characterised by the viewing angles
- A61B1/00177—Optical arrangements characterised by the viewing angles for 90 degrees side-viewing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/043—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances for fluorescence imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0071—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence by measuring fluorescence emission
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0028—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders specially adapted for specific applications, e.g. for endoscopes, ophthalmoscopes, attachments to conventional microscopes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/0004—Microscopes specially adapted for specific applications
- G02B21/002—Scanning microscopes
- G02B21/0024—Confocal scanning microscopes (CSOMs) or confocal "macroscopes"; Accessories which are not restricted to use with CSOMs, e.g. sample holders
- G02B21/0052—Optical details of the image generation
- G02B21/0076—Optical details of the image generation arrangements using fluorescence or luminescence
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/06—Means for illuminating specimens
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/18—Arrangements with more than one light path, e.g. for comparing two specimens
- G02B21/20—Binocular arrangements
- G02B21/22—Stereoscopic arrangements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B21/00—Microscopes
- G02B21/24—Base structure
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2423—Optical details of the distal end
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00172—Optical arrangements with means for scanning
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Optics & Photonics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Astronomy & Astrophysics (AREA)
- Ophthalmology & Optometry (AREA)
- Investigating, Analyzing Materials By Fluorescence Or Luminescence (AREA)
- Endoscopes (AREA)
- Microscoopes, Condenser (AREA)
Abstract
Description
도 2는 한 실시예에 따른 내시프로브의 예시이다.
도 3은 한 실시예에 따른 회전형 프로브 이동 장치의 예시이다.
도 4는 한 실시예에 따른 공초점 현미경 장치의 예시이다.
도 5는 한 실시예에 따른 생체 내 유리관 이식을 위한 두개골 부착형 플레이트를 설명하는 도면이다.
도 6은 한 실시예에 따른 미세 영상 획득 시스템의 스테이지에 마우스가 고정된 모습을 설명하는 도면이다.
도 7은 한 실시예에 따른 미세 영상 획득 시스템으로 획득한 마우스의 뇌조직 영상의 예시이다.
도 8은 한 실시예에 따라 획득한 대면적 형광 영상의 예시이다.
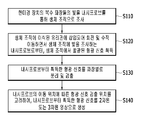
도 9는 한 실시예에 따른 미세 영상 획득 방법의 흐름도이다.
Claims (15)
- 미세 영상 획득 시스템으로서,
복수 파장들의 빛을 주사(scanning)하여 대물 렌즈로 전달하고, 생체 조직에서 반사되어 대물 렌즈로 들어온 형광 신호를 검출하는 현미경 장치,
생체에 이식된 유리관에 삽입되어 상기 대물 렌즈에서 입사된 빛을 아랫단의 측면 개구부로 전달하고, 형광 물질 표지된 상기 생체 조직에서 발광된 형광 신호를 상기 대물 렌즈로 전달하는 렌즈로 구성된 내시프로브, 그리고
상기 내시프로브를 고정하고, 고정된 상기 내시프로브를 회전 또는 수직 이동시키는 회전형 프로브 이동 장치
를 포함하는 미세 영상 획득 시스템. - 제1항에서,
상기 내시프로브는
상기 대물 렌즈를 투과한 빛을 전달하는 굴절률 분포형 렌즈(gradient index lens, GRIN lens), 그리고 상기 굴절률 분포형 렌즈로부터 전달된 빛을 측면으로 조사하는 마이크로프리즘을 포함하는, 미세 영상 획득 시스템. - 제1항에서,
상기 내시프로브는
커플링 렌즈(coupling lens), 릴레이 렌즈(relay lens), 그리고 이미징 렌즈(imaging lens)로 구성되는 미세 영상 획득 시스템. - 제1항에서,
상기 회전형 프로브 이동 장치는
상기 내시프로브를 고정하는 프로브 홀더,
상기 프로브 홀더를 끼우고 회전시키는 회전 틀, 그리고
상기 회전 틀을 수직 또는 수평 이동시키는 이동 스테이지
를 포함하는, 미세 영상 획득 시스템. - 제4항에서,
상기 회전형 프로브 이동 장치는
상기 회전 틀을 움직여 상기 프로브 홀더에 고정된 상기 내시프로브를 회전시키고, 상기 이동 스테이지를 움직여 상기 내시프로브를 수직 방향으로 이동시키는, 미세 영상 획득 시스템. - 제1항에서,
상기 유리관이 이식된 동물을 정위 고정(stereotactic system)하는 스테이지를 더 포함하고,
상기 유리관을 부착한 플레이트가 상기 스테이지에 고정되는, 미세 영상 획득 시스템. - 제1항에서,
상기 유리관은 상기 플레이트에 고정되어 상기 동물에 이식되는, 미세 영상 획득 시스템. - 제1항에서,
상기 유리관은 상기 내시프로브에서 조사된 빛의 굴절을 조절하는 특정 굴절률의 액체로 채워지는, 미세 영상 획득 시스템 - 제1항에서,
상기 현미경 장치는
상기 복수 파장들의 빛을 방출하는 레이저 광원들,
복수의 거울들을 이용하여 상기 레이저 광원들로부터 나오는 빛을 주사하는 스캐너,
상기 스캐너를 통과하여 나온 빛을 상기 내시프로브로 전달하는 상기 대물 렌즈,
상기 내시프로브로부터 들어온 형광 신호 중에서 공초점면에 설치된 핀홀들을 통과한 형광 신호를 파장별로 검출하는 광검출기들, 그리고
상기 광검출기들에서 출력된 신호들을 조합하여 영상을 생성하는 컴퓨팅 장치를 포함하는, 미세 영상 획득 시스템. - 제1항에서,
상기 현미경 장치는
다광자 현미경(Multi-photon microscopy)을 포함하는, 미세 영상 획득 시스템. - 제1항에서,
상기 컴퓨팅 장치는
상기 내시프로브가 회전하는 경우, 특정 깊이의 생체 조직에 표지된 형광 물질이 상기 레이저 광원들에 의해 여기되어 나타나는 형광 영상을 생성하는, 미세 영상 획득 시스템. - 제9항에서,
상기 컴퓨팅 장치는
상기 내시프로브의 회전 및 수직 이동 위치를 기초로, 상기 생체 조직의 형광 영상을 입체적으로 생성하는, 미세 영상 획득 시스템. - 미세 영상 획득 시스템의 미세 영상 획득 방법으로서,
현미경 장치의 복수 파장들의 빛을 내시프로브를 통해 생체 조직으로 조사하는 단계, 그리고
상기 생체 조직에서 발광된 형광 신호를 이용하여, 상기 생체 조직에 표지된 형광 물질이 다중 파장 레이저에 의해 여기되어 나타나는 형광 영상을 생성하는 단계를 포함하고,
상기 복수 파장들의 빛은 상기 현미경 장치의 대물 렌즈에서 상기 내시프로브의 렌즈로 전달되어 상기 내시프로브의 측면 개부구 주변의 생체 조직에 조사되고, 상기 형광 신호는 상기 내시프로브의 렌즈에서 상기 대물 렌즈로 전달되며,
상기 내시프로브는 생체 조직에 이식된 유리관에 삽입되어 회전 및 수직 이동하는, 미세 영상 획득 방법. - 제13항에서,
상기 형광 영상을 생성하는 단계는
상기 내시프로브의 회전 및 수직 이동 위치를 기초로, 상기 생체 조직의 형광 영상을 입체적으로 생성하는, 미세 영상 획득 방법. - 제13항에서,
상기 현미경 장치는 공초점 현미경 또는 다광자 현미경을 포함하는, 미세 영상 획득 방법.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19874529.1A EP3868282A4 (en) | 2018-10-17 | 2019-10-07 | MICROSCOPIC IMAGE CAPTURE SYSTEM OF IN VIVO DEEP TISSUE AND MICROSCOPIC IMAGE DELIVERY METHOD THEREOF |
| CN201980083984.5A CN113242715A (zh) | 2018-10-17 | 2019-10-07 | 体内深层组织的显微图像采集系统及显微图像提供方法 |
| PCT/KR2019/013128 WO2020080721A1 (ko) | 2018-10-17 | 2019-10-07 | 생체 심부 조직의 미세 영상 획득 시스템 및 이의 미세 영상 제공 방법 |
| US17/230,097 US20210231942A1 (en) | 2018-10-17 | 2021-04-14 | System for in vivo microscopic imaging of deep tissue, and microscopic imaging method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20180123869 | 2018-10-17 | ||
| KR1020180123869 | 2018-10-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200043251A true KR20200043251A (ko) | 2020-04-27 |
| KR102186327B1 KR102186327B1 (ko) | 2020-12-03 |
Family
ID=70467833
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180155498A Active KR102186327B1 (ko) | 2018-10-17 | 2018-12-05 | 생체 심부 조직의 미세 영상 획득 시스템 및 이의 미세 영상 제공 방법 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20210231942A1 (ko) |
| EP (1) | EP3868282A4 (ko) |
| KR (1) | KR102186327B1 (ko) |
| CN (1) | CN113242715A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113391438A (zh) * | 2021-03-01 | 2021-09-14 | 清华大学 | 基于微透镜的多平面显微成像系统及成像方法 |
| CN113495353A (zh) * | 2021-07-02 | 2021-10-12 | 安徽大学 | 一种用于显微系统的可调多波长数据采集系统 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114287881B (zh) * | 2021-12-11 | 2024-03-15 | 中国科学院深圳先进技术研究院 | 一种微型单光子荧光显微镜植入装置及植入方法 |
| CN119335718A (zh) * | 2024-10-19 | 2025-01-21 | 哈尔滨工业大学 | 一种基于梯度折射率透镜的机器人式显微成像系统和方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016072873A1 (en) * | 2014-11-04 | 2016-05-12 | Instytut Biologii Doswiadczalnej Im. M. Nenckiego Polskiej Akademii Nauk | Device and assembly for immobilizing an animal, use of such device and method for immobilizing an animal |
| KR101689879B1 (ko) * | 2015-08-31 | 2016-12-26 | 재단법인 의약바이오컨버젼스연구단 | 생체 내 유방조직 미세영상 획득을 위한 윈도우 장치 및 이를 이용한 영상 획득 방법 |
| KR101731728B1 (ko) * | 2015-05-12 | 2017-05-02 | 한국과학기술원 | 관상동맥 혈관 고속 스캐닝 장치 및 방법 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2002891A1 (en) * | 1988-11-14 | 1990-05-14 | Walter J. Levy, Jr. | In vivo window chamber |
| US6530882B1 (en) * | 2000-06-30 | 2003-03-11 | Inner Vision Imaging, L.L.C. | Endoscope having microscopic and macroscopic magnification |
| US20080124787A1 (en) * | 2001-02-13 | 2008-05-29 | Avigenics, Inc. | Microinjection devices and methods of use |
| JP2004317437A (ja) * | 2003-04-18 | 2004-11-11 | Olympus Corp | 光イメージング装置 |
| AU2013327405B2 (en) * | 2012-10-04 | 2017-03-16 | The University Of Western Australia | A method and system for characterising biological tissue |
| KR101898220B1 (ko) * | 2015-08-04 | 2018-09-12 | 한국과학기술원 | 공초점 현미경 및 이를 이용한 영상 처리 방법 |
| EP3371572B1 (en) * | 2015-11-05 | 2021-05-05 | Inscopix, Inc. | System for optogenetic imaging |
-
2018
- 2018-12-05 KR KR1020180155498A patent/KR102186327B1/ko active Active
-
2019
- 2019-10-07 EP EP19874529.1A patent/EP3868282A4/en not_active Withdrawn
- 2019-10-07 CN CN201980083984.5A patent/CN113242715A/zh active Pending
-
2021
- 2021-04-14 US US17/230,097 patent/US20210231942A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016072873A1 (en) * | 2014-11-04 | 2016-05-12 | Instytut Biologii Doswiadczalnej Im. M. Nenckiego Polskiej Akademii Nauk | Device and assembly for immobilizing an animal, use of such device and method for immobilizing an animal |
| KR101731728B1 (ko) * | 2015-05-12 | 2017-05-02 | 한국과학기술원 | 관상동맥 혈관 고속 스캐닝 장치 및 방법 |
| KR101689879B1 (ko) * | 2015-08-31 | 2016-12-26 | 재단법인 의약바이오컨버젼스연구단 | 생체 내 유방조직 미세영상 획득을 위한 윈도우 장치 및 이를 이용한 영상 획득 방법 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113391438A (zh) * | 2021-03-01 | 2021-09-14 | 清华大学 | 基于微透镜的多平面显微成像系统及成像方法 |
| CN113495353A (zh) * | 2021-07-02 | 2021-10-12 | 安徽大学 | 一种用于显微系统的可调多波长数据采集系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3868282A4 (en) | 2022-07-27 |
| US20210231942A1 (en) | 2021-07-29 |
| EP3868282A1 (en) | 2021-08-25 |
| KR102186327B1 (ko) | 2020-12-03 |
| CN113242715A (zh) | 2021-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210231942A1 (en) | System for in vivo microscopic imaging of deep tissue, and microscopic imaging method | |
| Thériault et al. | Extended two-photon microscopy in live samples with Bessel beams: steadier focus, faster volume scans, and simpler stereoscopic imaging | |
| US8575570B2 (en) | Simultaneous orthogonal light sheet microscopy and computed optical tomography | |
| JP2005121947A (ja) | 対物レンズ挿入具及び顕微鏡並びに顕微鏡システム | |
| JP2008100057A (ja) | レーザー内視鏡検査における高解像度の顕微鏡画像又は切断のための方法及び装置 | |
| US10595770B2 (en) | Imaging platform based on nonlinear optical microscopy for rapid scanning large areas of tissue | |
| JP7495994B2 (ja) | 医療光学系、データ処理システム、コンピュータプログラム、及び不揮発性コンピュータ可読記憶媒体 | |
| CN103054554B (zh) | 一种沿轴向进行深度扫描的光学成像装置、方法及其应用 | |
| CN108474932A (zh) | 大视场、高分辨率的显微镜 | |
| Keomanee-Dizon et al. | A versatile, multi-laser twin-microscope system for light-sheet imaging | |
| KR20170016773A (ko) | 공초점 현미경 및 이를 이용한 영상 처리 방법 | |
| KR101767339B1 (ko) | 생체 내 췌장조직 미세영상 획득을 위한 윈도우 장치 및 이를 이용한 영상 획득 방법 | |
| CN108366727B (zh) | 一种获取活体内乳房组织显微影像的视窗装置及利用其获取影像的方法 | |
| WO2020080721A1 (ko) | 생체 심부 조직의 미세 영상 획득 시스템 및 이의 미세 영상 제공 방법 | |
| US11051698B2 (en) | Optical microscopy probe for scanning microscopy of an associated object | |
| US20130194409A1 (en) | Multi-photon fluoroscopy attachment module for a surgical microscope | |
| JP2006510932A (ja) | コヒーレンス顕微鏡 | |
| US7616292B2 (en) | Examination apparatus | |
| US12449364B2 (en) | Method and device for optically examining a biological sample | |
| Martinelli | Combining light sheet fluorescent microscopy with photostimulation for dynamic studies | |
| Kim | Development of high-speed imaging techniques for C. elegans nervous system studies | |
| Morozov et al. | Light Sheet Microscopy Comes of Age | |
| JP2005128240A (ja) | 対物レンズユニット及び顕微鏡並びに顕微鏡システム | |
| Pillai et al. | Fiber-optic confocal microscopy using a miniaturized needle-compatible imaging probe | |
| Raja et al. | Product Review |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181205 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200507 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20201120 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20201127 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20201127 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20230918 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20241024 Start annual number: 5 End annual number: 5 |