KR20200043426A - 킥백 발생 동안 사용자에게 촉각 피드백을 공급하기 위한 휴대형 외과기구 및 방법 - Google Patents
킥백 발생 동안 사용자에게 촉각 피드백을 공급하기 위한 휴대형 외과기구 및 방법 Download PDFInfo
- Publication number
- KR20200043426A KR20200043426A KR1020207007818A KR20207007818A KR20200043426A KR 20200043426 A KR20200043426 A KR 20200043426A KR 1020207007818 A KR1020207007818 A KR 1020207007818A KR 20207007818 A KR20207007818 A KR 20207007818A KR 20200043426 A KR20200043426 A KR 20200043426A
- Authority
- KR
- South Korea
- Prior art keywords
- transmission
- surgical
- clutch
- motor
- end effector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
- 238000000034 method Methods 0.000 title claims description 64
- 239000012636 effector Substances 0.000 claims abstract description 138
- 230000005540 biological transmission Effects 0.000 claims abstract description 125
- 230000008859 change Effects 0.000 claims abstract description 13
- 230000033001 locomotion Effects 0.000 claims description 38
- 230000000007 visual effect Effects 0.000 claims description 19
- 238000004891 communication Methods 0.000 claims description 7
- 238000001514 detection method Methods 0.000 claims description 7
- 230000006870 function Effects 0.000 description 95
- 230000008878 coupling Effects 0.000 description 18
- 238000010168 coupling process Methods 0.000 description 18
- 238000005859 coupling reaction Methods 0.000 description 18
- 238000005553 drilling Methods 0.000 description 13
- 230000000295 complement effect Effects 0.000 description 10
- 238000005520 cutting process Methods 0.000 description 7
- 238000000429 assembly Methods 0.000 description 6
- 230000001186 cumulative effect Effects 0.000 description 6
- 230000000712 assembly Effects 0.000 description 5
- 238000007373 indentation Methods 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000003213 activating effect Effects 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 210000000988 bone and bone Anatomy 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000003825 pressing Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 210000001519 tissue Anatomy 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 239000011800 void material Substances 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 208000010392 Bone Fractures Diseases 0.000 description 1
- 206010013082 Discomfort Diseases 0.000 description 1
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 208000006670 Multiple fractures Diseases 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 230000001050 lubricating effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000002285 radioactive effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000009751 slip forming Methods 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
Images


























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1615—Drill bits, i.e. rotating tools extending from a handpiece to contact the worked material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1622—Drill handpieces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1622—Drill handpieces
- A61B17/1624—Drive mechanisms therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1626—Control means; Display units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1631—Special drive shafts, e.g. flexible shafts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/162—Chucks or tool parts which are to be held in a chuck
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1628—Motors; Power supplies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00115—Electrical control of surgical instruments with audible or visual output
- A61B2017/00119—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00734—Aspects not otherwise provided for battery operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/066—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring torque
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Dentistry (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Pathology (AREA)
- Mechanical Engineering (AREA)
- Surgical Instruments (AREA)
Abstract
일 실시예는 회전식 외과용 엔드 이펙터 및 이를 회전시키도록 구성된 커플러를 포함하는 휴대형 외과기구에 관한 것이다. 휴대형 외과기구는 모터 출력 영역을 구동하도록 구성된 모터를 추가로 포함한다. 휴대형 외과기구는 모터 출력 영역과 접속하는 트랜스미션 입력 영역 및 트랜스미션 입력 영역에 연결된 트랜스미션 출력 영역을 규정하는 트랜스미션을 더 포함한다. 트랜스미션 출력 영역은 커플러에 작동 가능하게 결합되고, 트랜스미션은 모터 출력 영역에 대한 커플러의 속도를 변경하도록 구성된다. 모터 출력 영역과 트랜스미션 입력 영역은 모터-트랜스미션 인터페이스에서 서로 접속하고, 모터-트랜스미션 인터페이스는 모터-트랜스미션 백래시를 포함하여, 모터-트랜스미션 백래시 내에서 모터 출력 영역의 구동이 회전식 외과용 엔드 이펙터의 회전을 유발하지 않는다.
Description
[관련 출원에 대한 교차 참조]
본 출원은 2017년 8월 17일자로 출원된 미국 가출원 제 62/546,770 호에 대한 이익을 주장하며, 이는 그 전문이 본원에 참조로 포함된다.
본 발명은 시술 기능을 수행하거나 종료하지 않으면서 피드백 기능을 수행하도록 구동 시스템과 작동 가능하게 체결되는 커플러 및 구동 시스템을 포함하는 휴대형 외과기구 및 방법에 관한 것이다.
정형외과 수술에 사용되는 일반적인 외과용 도구는 외과용 드릴이다. 일반적인 외과용 드릴에는 모터가 포함된 하우징이 있다. 외과용 드릴은 드릴 비트를 모터에 해제 가능하게 연결하여 외과의가 드릴 비트를 회전시키기 위해 모터를 작동시킬 수 있는 커플링 조립체를 더 포함한다. 그 이름에서 알 수 있듯이, 외과용 드릴은 드릴 비트가 적용되는 조직에 보어(bore)를 뚫도록 구성된다. 보어를 뚫어야 하는 한 가지 유형의 외과용 절차는 부러진 뼈를 치료하기 위한 외상 수술(trauma procedure)이다.
외과용 드릴의 단점은 드릴 비트가 갑자기 바인딩되고, 핀칭되고 또는 오정렬되어서, 외과의가 드릴 비트로부터 핸드 피스를 통해 외과의에게 전달되는 토크 형태의 킥백을 경험할 수 있다는 것이다. 파편은 드릴 비트의 회전을 방해할 수 있으며, 킥백은, 특히 외과용 드릴이 고밀도 뼈 적용에 있어서 고속 드릴링 또는 토크가 높은 리밍을 수행하도록 사용될 때 외과의에게 불편감을 주고 외과의가 외과용 드릴을 제어하는 능력을 감소시킬 수 있다.
일 실시예는 킥백시 촉각 피드백을 제공하도록 구성된 휴대형 외과기구에 관한 것이다. 휴대형 외과기구는 회전식 외과용 엔드 이펙터 및 회전식 외과용 엔드 이펙터에 작동 가능하게 결합되어 그 회전을 발생시키도록 구성된 커플러를 포함한다. 휴대형 외과기구는 모터 출력 영역을 규정하는 모터 샤프트를 포함하는 모터를 추가로 포함한다. 모터는 모터 출력 영역을 구동하도록 구성되어 있다. 휴대형 외과기구는 모터 출력 영역과 접속하는 트랜스미션 입력 영역 및 트랜스미션 입력 영역에 연결된 트랜스미션 출력 영역을 규정하는 트랜스미션을 더 포함한다. 트랜스미션 출력 영역은 커플러에 작동 가능하게 결합되고, 트랜스미션은 모터 출력 영역에 대한 커플러의 속도를 변경하도록 구성된다. 모터 출력 영역과 트랜스미션 입력 영역은 모터-트랜스미션 인터페이스에서 서로 접속하고, 모터-트랜스미션 인터페이스는 모터-트랜스미션 백래시를 포함하여, 모터-트랜스미션 백래시 내에서 모터 출력 영역의 구동은 회전식 외과용 엔드 이펙터의 회전을 유발하지 않는다. 휴대형 외과기구는 그립 이벤트 신호를 생성하도록 구성된 센서 및 센서로부터 그립 이벤트 신호를 수신하기 위해 센서와 작동 가능하게 결합된 컨트롤러를 더 포함한다. 컨트롤러는 그립 이벤트 신호에 기초하여 그립 이벤트를 결정하도록 구성되고, 컨트롤러는 회전식 외과용 엔드 이펙터를 회전시키지 않고 피드백 기능을 수행하기 위해 모터 샤프트를 진동시키도록 추가로 구성된다.
다른 실시예는 킥백 이벤트 동안 사용자에게 촉각 피드백을 제공하도록 구성된 휴대형 외과기구에 관한 것이다. 휴대형 외과기구는 외과용 엔드 이펙터에 작동 가능하게 결합되도록 구성된 커플러를 포함한다. 휴대형 외과기구는 구동 기능을 수행하기 위해 외과용 엔드 이펙터를 작동시키기 위해 커플러와 작동 가능하게 체결된 출력 부재를 포함하는 구동 시스템을 추가로 포함한다. 휴대형 외과기구는 그립 이벤트 신호를 생성하도록 구성된 제 1 센서 및 제 1 센서로부터 그립 이벤트 신호를 수신하기 위해 제 1 센서와 작동 가능하게 결합된 컨트롤러를 더 포함한다. 컨트롤러는 그립 이벤트 신호에 기초하여 그립 이벤트를 결정하도록 구성되고, 컨트롤러는 외과용 엔드 이펙터가 시술 기능을 수행하게 하지 않으면서 피드백 기능을 수행하기 위해 출력 부재를 제 1 및 제 2 방향으로 진동 시키도록 추가로 구성된다.
또 다른 실시예는, 백래시를 갖는 구동 시스템, 구동 시스템과 작동 가능하게 결합된 커플러, 시술 기능을 수행하기 위해 커플러와 작동 가능하게 결합된 외과용 엔드 이펙터, 적어도 하나의 그립 이벤트 신호를 생성하도록 구성된 제 1 센서 및 및 제 1 센서 및 구동 시스템과 통신하는 컨트롤러를 포함하는 휴대형 외과기구의 사용자에게 피드백을 제공하는 방법에 관한 것이다. 이 방법은 그립 이벤트 신호에 기초하여 그립 이벤트를 감지하고 그립 이벤트의 감지시 외과용 엔드 이펙터를 회전 또는 진동시키지 않고 백래시 내에서 구동 시스템을 진동시키는 단계를 포함한다.
이제 도면을 참조하면, 예시적인 예시가 상세하게 도시되어 있다. 비록 도면이 예를 나타내지만, 도면은 반드시 축척대로 도시된 것은 아니며 예시적인 예의 특정 측면을 보다 잘 설명하고 설명하기 위해 특정 특징이 과장되거나 개략적으로 도시될 수 있다. 이들 측면들 중 임의의 하나 이상은 단독으로 또는 서로 조합하여 사용될 수 있다. 또한, 본 명세서에 설명된 예시적인 예시는 도면에 도시되고 다음의 상세한 설명에 개시된 정확한 형태 및 구성을 총 망라하거나 그렇지 않으면 달리 한정하거나 제한하는 것으로 의도되지 않는다. 예시적인 예시는 도면을 참조하여 상세하게 설명된다.
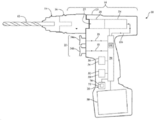
도 1은 특정 내부 구성 요소가 가상 선으로 도시된 일 실시예에 따른 휴대형 외과기구의 사시도이다.
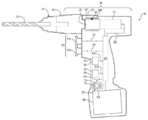
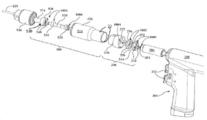
도 2는 도 1의 휴대형 외과기구의 분해도이다.
도 3은 모터를 정류하거나 시술 기능을 수행하지 않고 피드백 기능을 수행하기 위해 이격된 권선들 사이에서 진동하는 회전자를 갖는, 도 1의 모터의 개략도이다.
도 4a는 도 1의 휴대형 외과기구의 개략도이며, 컨트롤러가 입력 장치로부터 입력 신호(IS)를 수신하고, 입력 신호에 기초하여 시술 기능을 수행하기 위해, 구동 시스템을 작동시켜 외과용 엔드 이펙터에 토크 및 속도를 전달하기 위한 시술 신호를 생성하는 것을 도시한다.
도 4b는 제 1 및 제 2 센서로부터 제 1 및 제 2 이벤트 신호를 수신하고 제 1 및 제 2 그립 이벤트 신호에 기초한 피드백 기능을 수행하기 위한 모터를 작동시키기 위한 피드백 신호를 생성하는 컨트롤러를 도시한, 도 1의 휴대형 외과기구의 개략도이다.
도 4c는 제 1 및 제 2 센서로부터 제 1 및 제 2 그립 이벤트 신호를 수신하고 제 1 및 제 2 그립 이벤트 신호에 기초하여 피드백 기능을 수행하기 위해 시각적 표시기 및 모터 또는 기어 트레인을 작동시키기 위한 피드백 신호를 생성하는 컨트롤러를 도시한, 도 1의 휴대형 외과기구의 개략도이다.
도 5a는 휴대형 외과기구의 측면도이다.
도 5b는 트랜스미션의 다수의 스테이지 및 백래시를 갖는 다수의 인터페이스를 도시하는, 도 5a의 휴대형 외과기구의 부분 분해도이다.
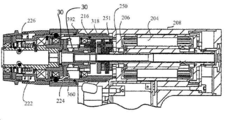
도 6a는 종축을 따른 도 5a의 휴대형 외과기구의 선단의 단면도이다.
도 6b는 도 6a의 휴대형 외과기구의 원위 단부의 확대 단면도이다.
도 7은 휴대형 외과기구의 원위 전단의 부분 분해도이다.
도 8은 휴대형 외과기구의 트랜스미션의 분해도이다.
도 9는 도 8의 트랜스미션의 단면도이다.
도 10은 휴대형 외과기구의 스핀들의 평면도이다.
도 11은 라인 11-11을 따라 취한 도 10의 출력 부재를 위한 스핀들의 단면도이다.
도 12는 클러치의 클러치 출력 영역의 사시도이다.
도 13은 클러치 출력 영역의 단면도이다.
도 14는 휴대형 외과기구의 출력 부재를 위한 회전 하우징의 단부도이다.
도 15는 출력 부재의 회전 하우징의 평면도이다.
도 16은 라인 16-16을 따라 취한 도 15의 출력 부재의 회전 하우징의 단면도이다.
도 17은 클러치의 분해도이다.
도 18은 클러치의 내부 시프터의 사시도이다.
도 19는 클러치의 내부 시프터의 단면도이다.
도 20은 클러치의 시프터 하우징의 사시도이다.
도 21은 클러치의 시프터 하우징의 단면도이다.
도 22는 클러치의 시프트 링의 사시도이다.
도 23은 클러치의 시프트 링의 단면도이다.
도 24는 클러치의 시프트 링 너트의 사시도이다.
도 25는 클러치의 시프트 링 너트의 단면도이다.
도 26은 커플러의 분해도이다.
도 27은 외과용 엔드 이펙터의 평면도이다.
도 28a는 속도 변경 외과용 부착물의 평면도이다.
도 28b는 백래시를 갖는 다수의 인터페이스를 갖는 속도 변경 외과용 부착물 및 휴대형 외과기구의 분해도이다.
도 29는 속도 변경 외과용 부착물의 종단면도이다.
도 30은 라인 30-30을 따라 취한 도 29의 속도 변경 외과용 부착물의 입력 기어 트레인의 측 단면도이다.
도 31은 라인 31-31을 따라 취한 도 29의 속도 변경 외과용 부착물의 출력 기어 조립체의 측 단면도이다.
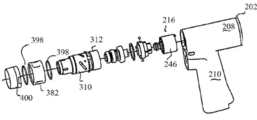
도 32는 속도 변경 외과용 부착물의 분해도이다.
도 33은 휴대형 외과기구의 사용자에게 피드백을 제공하기 위한 방법의 방법에 대한 흐름도이다.
도 1은 특정 내부 구성 요소가 가상 선으로 도시된 일 실시예에 따른 휴대형 외과기구의 사시도이다.
도 2는 도 1의 휴대형 외과기구의 분해도이다.
도 3은 모터를 정류하거나 시술 기능을 수행하지 않고 피드백 기능을 수행하기 위해 이격된 권선들 사이에서 진동하는 회전자를 갖는, 도 1의 모터의 개략도이다.
도 4a는 도 1의 휴대형 외과기구의 개략도이며, 컨트롤러가 입력 장치로부터 입력 신호(IS)를 수신하고, 입력 신호에 기초하여 시술 기능을 수행하기 위해, 구동 시스템을 작동시켜 외과용 엔드 이펙터에 토크 및 속도를 전달하기 위한 시술 신호를 생성하는 것을 도시한다.
도 4b는 제 1 및 제 2 센서로부터 제 1 및 제 2 이벤트 신호를 수신하고 제 1 및 제 2 그립 이벤트 신호에 기초한 피드백 기능을 수행하기 위한 모터를 작동시키기 위한 피드백 신호를 생성하는 컨트롤러를 도시한, 도 1의 휴대형 외과기구의 개략도이다.
도 4c는 제 1 및 제 2 센서로부터 제 1 및 제 2 그립 이벤트 신호를 수신하고 제 1 및 제 2 그립 이벤트 신호에 기초하여 피드백 기능을 수행하기 위해 시각적 표시기 및 모터 또는 기어 트레인을 작동시키기 위한 피드백 신호를 생성하는 컨트롤러를 도시한, 도 1의 휴대형 외과기구의 개략도이다.
도 5a는 휴대형 외과기구의 측면도이다.
도 5b는 트랜스미션의 다수의 스테이지 및 백래시를 갖는 다수의 인터페이스를 도시하는, 도 5a의 휴대형 외과기구의 부분 분해도이다.
도 6a는 종축을 따른 도 5a의 휴대형 외과기구의 선단의 단면도이다.
도 6b는 도 6a의 휴대형 외과기구의 원위 단부의 확대 단면도이다.
도 7은 휴대형 외과기구의 원위 전단의 부분 분해도이다.
도 8은 휴대형 외과기구의 트랜스미션의 분해도이다.
도 9는 도 8의 트랜스미션의 단면도이다.
도 10은 휴대형 외과기구의 스핀들의 평면도이다.
도 11은 라인 11-11을 따라 취한 도 10의 출력 부재를 위한 스핀들의 단면도이다.
도 12는 클러치의 클러치 출력 영역의 사시도이다.
도 13은 클러치 출력 영역의 단면도이다.
도 14는 휴대형 외과기구의 출력 부재를 위한 회전 하우징의 단부도이다.
도 15는 출력 부재의 회전 하우징의 평면도이다.
도 16은 라인 16-16을 따라 취한 도 15의 출력 부재의 회전 하우징의 단면도이다.
도 17은 클러치의 분해도이다.
도 18은 클러치의 내부 시프터의 사시도이다.
도 19는 클러치의 내부 시프터의 단면도이다.
도 20은 클러치의 시프터 하우징의 사시도이다.
도 21은 클러치의 시프터 하우징의 단면도이다.
도 22는 클러치의 시프트 링의 사시도이다.
도 23은 클러치의 시프트 링의 단면도이다.
도 24는 클러치의 시프트 링 너트의 사시도이다.
도 25는 클러치의 시프트 링 너트의 단면도이다.
도 26은 커플러의 분해도이다.
도 27은 외과용 엔드 이펙터의 평면도이다.
도 28a는 속도 변경 외과용 부착물의 평면도이다.
도 28b는 백래시를 갖는 다수의 인터페이스를 갖는 속도 변경 외과용 부착물 및 휴대형 외과기구의 분해도이다.
도 29는 속도 변경 외과용 부착물의 종단면도이다.
도 30은 라인 30-30을 따라 취한 도 29의 속도 변경 외과용 부착물의 입력 기어 트레인의 측 단면도이다.
도 31은 라인 31-31을 따라 취한 도 29의 속도 변경 외과용 부착물의 출력 기어 조립체의 측 단면도이다.
도 32는 속도 변경 외과용 부착물의 분해도이다.
도 33은 휴대형 외과기구의 사용자에게 피드백을 제공하기 위한 방법의 방법에 대한 흐름도이다.
도 1 및 도 2를 참조하면, 외과용 엔드 이펙터(12)와 함께 사용하기 위한 휴대형 외과기구(10)가 건강관리 환경에서 환자를 치료하기 위해 시술 기능(operational function) 및 피드백 기능을 수행하기 위해 도시되어 있다. 아래에 상세히 설명되는 바와 같이, 휴대형 외과기구(10)는 커플러(14), 및 모터(24), 트랜스미션(26), 및 커플러(14)와 작동 가능하게 결합된 출력 부재(16)(회전식 전단 조립체로서 구현됨)를 갖는 구동 시스템(18)을 포함할 수 있다.
시술 기능은 휴대형 외과기구(10)의 원하는 외과적 기능과 관련될 수 있다. 예를 들어, 시술 기능은 휴대형 외과기구(10) 및/또는 외과용 엔드 이펙터(12)의 구성에 의존하는 드릴링, 쏘잉(sawing), 절단 또는 다른 기능일 수 있다. 전형적으로, 본 명세서에 언급된 시술 기능은 회전식 절단(rotary cutting)이다.
이 예시적인 실시예에서, 휴대형 외과기구(10)는 회전식 핸드 피스로서 실현될 수 있고, 연관된 외과용 엔드 이펙터(12)는 드릴 비트와 같은 회전식 외과용 엔드 이펙터를 포함할 수 있다. 커플러(14)는 회전식 외과용 엔드 이펙터에 작동 가능하게 결합되어 그 회전을 발생시키도록 구성될 수 있다. 커플러(14)는 구동 시스템(18)에 결합된 척(chuck)을 포함할 수 있어, 드릴 비트가 큰 뼈 적용(large bone application)에서 고속 드릴링 또는 높은 토크 리밍(reaming)을 수행하기 위해 회전될 수 있다. 커플러(14)는 임의의 적절한 회전 또는 선형 방향으로 토크를 외과용 엔드 이펙터(12)에 전달하도록 구성될 수 있다. 예를 들어, 휴대형 외과기구가 드릴인 경우, 커플러(14)는 드릴 비트에 토크를 제공하도록 구성된다.
회전식 핸드 피스(10)는 무엇보다도 모터(24)의 작동에 답하여 회전하는 스핀들로 구성된 출력 부재(16)를 포함할 수 있다. 스핀들의 전단에는 커플러(14)가 부착되어 있다. 커플러(14)는 장치를 스핀들과 동시에 장치가 회전하도록 스핀들에 해제 가능하게 홀드한다. 일반적으로, 2가지 유형의 장치가 출력 부재(16)에 해제 가능하게 결합된다. 제 1 유형의 장치는 실제 외과용 엔드 이펙터, 예를 들어 드릴 비트 또는 리머(reamer)이다. 외과용 엔드 이펙터는 샤프트를 가질 수 있고, 샤프트의 근위 단부 또는 후방 단부는 커플러에 의해 출력 부재에 해제 가능하게 고정될 수 있다. 회전식 핸드 피스에 결합된 제 2 유형의 장치는 속도 변경 외과용 부착물과 같은 전단 부착물이다. 부착물에는 전단과 후단이 반대쪽에 있는 하우징이 있다. 입력 샤프트는 부착물 후단에서 연장된다. 부착물 전단에는 자체 출력 스핀들과 보완 커플링 조립체가 있다. 부착물이 속도 변경 외과용 부착물인 경우, 기어 조립체는 속도 변경 외과용 부착물의 입력 샤프트와 출력 스핀들 사이에 위치된다. 기어 조립체에는 일반적으로 토크를 증가시키고 부착물 출력 스핀들을 통해 부착된 외과용 엔드 이펙터에 적용되는 회전 운동의 속도를 감소시키는 기어가 포함된다. 실제 외과용 엔드 이펙터는 부착물 스핀들에 연결된다. 부착물은 외과용 엔드 이펙터에 적용되는 핸드 피스에 의해 회전 모멘트 출력 속도를 감소시키거나 증가시킨다. 전형적으로, 속도 변경 외과용 부착물은 부착된 외과용 엔드 이펙터의 토크를 증가시키고 속도를 감소시키기 위해 사용된다. 속도 변경 외과용 부착물의 다른 실시예는 부착된 외과용 엔드 이펙터의 토크를 감소시키고 속도를 증가시킨다.
휴대형 외과기구에 외과용 핸드 피스로부터 토크를 받는 제거 가능한 부착물이 제공되는 경우, 부착물은 커플러를 규정할 수 있다. 드릴링 공정을 위해, 부착물은 키가 없는 드릴 척 부착물, 키가 있는 드릴 척 부착물, 변형된 트링클(trinkle) 드릴 부착물, 표준 트링클 드릴 부착물, 버(bur) 부착물 등을 포함할 수 있다. 리밍 공정을 위해, 부착물은 변형된 트리클 리머 부착물, 표준 트링클 리머 부착물, 키가 있는 리머 척 부착물, 리머 부착물, 직각 구동 변형된 트링클 리머 부착물, 직각 구동 리머 부착물 등을 포함할 수 있다. 소잉 절차를 위해, 부착물은 시상(sagittal) 부착물을 포함할 수 있다. 그러나, 부착물은 다른 드릴링 부착물, 리밍 부착물 또는 톱 부착물을 포함할 수 있는 것으로 고려된다.
전술한 바와 같이, 부착물과 관련된 외과용 엔드 이펙터는 마이크로 버, 와이어, 핀, 리머, 방사성 드릴 비트, 마이크로 블레이드 등을 포함할 수 있다. 그러나, 다른 실시예에서, 외과용 엔드 이펙터는 다른 커팅 액세서리를 포함할 수 있다.
도 1 및 도 2를 참조하면, 커플러(14)는 외과용 엔드 이펙터(12)에 직접 작동 가능하게 결합되도록 구성된 유형이고, 구동 시스템(18)은 시술 기능을 수행하기 위해 외과용 엔드 이펙터(12)를 작동시키기 위해 커플러(14)와 작동 가능하게 결합된 출력 부재(16)를 포함한다. 구동 시스템(18)은 시술 기능을 수행하기 위해 커플러(14)를 통해 외과용 엔드 이펙터(12)로 토크를 전달하도록 구성될 수 있다. 아래에 상세히 설명되는 바와 같이, 휴대형 외과기구는 시술 기능을 수행하기 위해 외과용 엔드 이펙터를 구동하기 위해 사용되는 구동 부재들 사이의 다수의 인터페이스를 포함하고, 인터페이스의 누적 백래시 내에서 구동 부재의 이동은 외과용 엔드 이펙터를 이동시키고 시술 기능을 수행하지 않고 촉각 피드백을 제공할 수 있다.
모터(24)는 모터 출력 영역(42)을 규정하는 모터 샤프트를 포함하고, 모터 출력 영역(42)을 구동하도록 구성될 수 있다. 모터(24)는 도 2 및 도 3에 가장 잘 도시된 인러너(inrunner) 브러시리스 DC 전기 모터(BLDC 모터)의 형태로 구현될 수 있다. 모터 출력 영역(42)은 출력 샤프트의 형태일 수 있다. BLDC 모터(24)는 회전자(44)와 이격된 방사상 배열인 복수의 권선 또는 코일(48)을 갖는 외부 고정자(46)를 추가로 포함할 수 있다. 코일(48)은 직류를 수신하고 전자석을 제공하고 회전자(44)의 영구 자석을 끌어당기고 반발하는 교번 자기장을 생성하도록 회전되어 회전 토크를 발생시키고 모터(24)를 구동하여 외과용 엔드 이펙터(12)가 시술 기능을 수행하도록 작동 시키도록 활성화된다.
구동 시스템은 임의의 적합한 유형 또는 구성의 다른 모터를 포함할 수 있다는 것이 이해될 것이다. 예를 들어, 모터는 회전 방향, 왕복 선형 방향, 또는 임의의 다른 모션으로 토크를 외과용 엔드 이펙터에 전달하기 위해 아웃러너(outrunner) BLDC 모터, 브러시드 전기 모터, 또는 임의의 다른 적절한 모터일 수 있다. 시술 기능(OF)을 수행하기 위해 하나의 모터(미도시)가 사용될 수 있고, 피드백 기능을 수행하기 위해 다른 모터(미도시)가 사용될 수 있음을 이해할 것이다.
트랜스미션 출력 영역은 도 8에 대한 설명에서 상세히 설명된 바와 같이 하나 이상의 구동 헤드를 포함한다. 출력 부재(16)는 트랜스미션 출력 영역(25)에 작동 가능하게 결합된 출력 부재 입력 영역(29)을 규정하는 회전 전단 조립체로서 구현될 수 있어서 트랜스미션 출력 영역(25)의 구동이 출력 부재 입력 영역의 구동을 발생시킨다. 커플러(14)는 회전 전단 조립체의 원위 단부로서 구현될 수 있다.
구동 시스템(18)은 트랜스미션 입력 영역(27)의 구동을 발생시키기 위해 모터 출력 영역(42)에 작동 가능하게 결합된 트랜스미션 입력 영역(27)을 규정하는 트랜스미션(26)을 더 포함할 수 있다. 트랜스미션(26)은 트랜스미션 입력 영역(27)에 작동 가능하게 결합된 트랜스미션 출력 영역(25)을 더 규정하여 트랜스미션 입력 영역(27)의 구동이 트랜스미션 출력 영역(25)의 구동을 발생시키도록 구성된다. 트랜스미션 출력 영역(25)은 출력 부재(16)에 작동 가능하게 결합되어, 트랜스미션 출력 영역(25)의 구동이 상기 모터(24)에 대하여 상기 출력 부재(16)의 속도를 변경하고 출력 부재(16)의 구동을 발생시키도록 구성된다. 모터 출력 영역(42) 및 트랜스미션 입력 영역(27)은 모터-트랜스미션 인터페이스에서 서로 접속하며 모터-트랜스미션 인터페이스는 모터-트랜스미션 백래시를 가져서, 모터-트랜스미션 백래시내의 모터 출력 영역(42)의 구동이 트랜스미션 입력 영역(27)의 구동을 유발하지 않는다.
트랜스미션(26)은 복수의 내부 트랜스미션 인터페이스에서 서로 맞물린 복수의 기어를 포함하고, 내부 트랜스미션 인터페이스 중 적어도 하나는 내부 트랜스미션 백래시를 포함한다. 이 실시예에서, 트랜스미션(26)은 복수의 내부 트랜스미션 인터페이스에서 서로 접속하는 복수의 스테이지를 규정하는 유성 기어 트레인을 포함하고, 내부 트랜스미션 인터페이스 중 적어도 하나는 트랜스미션의 구동을 위해 내부 트랜스미션 백래시를 포함하여 내부 트랜스미션 백래시 내의 트랜스미션의 구동이 출력 부재(16)의 구동을 발생시키지 않는다.
트랜스미션(26)은 모터(24)에 의해 발생된 토크 출력을 증가시키거나 감소시키고 시술 기능을 수행하기 위해 커플러(14)를 통해 외과용 적 엔드 이펙터(12) 또는 부착물에 토크를 전달하도록 구성될 수 있다. 도시된 실시예에서, 트랜스미션(26)은 휴대형 외과기구(10)의 원위 영역(23)에 배치된다. 휴대형 외과기구(10)는 클러치를 더 포함할 수 있으며, 이는 도 5b, 6a 및 6B에 도시된 클러치(224)의 형태일수 있다.
휴대형 외과기구(10)는 구동 시스템(18), 컨트롤러(20), 입력 장치(22) 등에 에너지를 공급하기 위한 배터리(50)(도 4a에 도시됨) 및/또는 외부 전력(미도시)을 더 포함할 수 있다. 구동 시스템(18)에는 휴대형 외과기구(10)와 관련된 최고 토크 및/또는 최고 속도 드릴링 또는 리밍을 수행하기 위해 토크를 외과용 엔드 이펙터(12)에 전달하기 위한 미리 정해진 최대 인발이 제공될 수 있다. 배터리(50)는 리튬-이온 배터리일 수 있다. 그러나, 배터리(50)는 다양한 다른 배터리일 수 있는 것으로 고려된다. 일 실시예에서, LED와 같은 시각적 표시기(28)는 아래에서 상세히 설명되는 바와 같이 배터리(50)에 결합될 수 있다. 배터리는 충전 상태, 열화 레벨, 사용 횟수 등과 같은 배터리의 상태를 결정할 수 있는 마이크로 컨트롤러를 가질 수 있다. 배터리의 마이크로 컨트롤러는 충전 상태 또는 마모 레벨이 미리 결정된 스레스홀드 미만일 때 LED를 조명하는 것과 같이 배터리의 상태에 기초하여 시각적 표시기를 트리거하도록 구성될 수 있다.
입력 장치(22)는 하나 이상의 시술 기능(OF)을 수행하는 것과 관련된 하나 이상의 입력 신호(IS)(도 4a에 도시됨)를 생성하도록 눌려지고, 스위칭되고, 토글링되도록 구성되는 물리적으로, 이동가능한 구성요소로서 실현되는 제 1 및/또는 제 2 가변 속도 트리거 버튼(34a, 34b)을 포함할 수 있다. 제 1 및 제 2 가변 속도 트리거 버튼(34a, 34b)은 사용자가 제 1 및/또는 제 2 가변 속도 트리거 버튼(34a, 34b)을 얼마나 눌렀는지에 비례하는 방식으로 입력 신호(IS)를 생성할 수 있다. 당업자는 입력 신호(IS)가 입력 장치(22)의 특정 구성에 따라 다수의 상이한 방식으로 실현될 수 있다는 것을 이해할 것이다. 예를 들어, 입력 신호(IS)는 가변 신호, 디지털 또는 아날로그 신호, 파형 등으로서 실현될 수 있다. 따라서, 이하의 후속 설명으로부터 알 수 있는 바와 같이, 직접 입력 신호(IS)를 통해 또는 컨트롤러(20)에 의해, 구동 시스템(18)을 구동하는데 사용되는 출력 신호 또는 파형은 다수의 상이한 방식으로 시술 기능의 성능에 영향을 미칠 수 있다. 다른 실시예에서, 입력 장치는 1개, 3개, 4개, 5개 또는 그 이상의 버튼 또는 다른 적합한 유형의 입력 장치를 포함할 수 있다.
휴대형 외과기구(10)는 하나 이상의 비촉각(non-tactile) 표시기를 더 포함할 수 있다. 비촉각 표시기는 가청 표시기, 시각적 표시기(28), 또는 휴대형 외과기구(10)상의 임의의 적절한 위치 또는 구성에 장착된 다른 적절한 표시기를 포함할 수 있다. 이 예시적인 실시예에서, 시각적 표시기(28)는 LED(미도시)와 같은 발광기(70) 및 배터리에 결합된 링형 광 가이드(72)를 포함할 수 있다. 휴대형 외과기구는 휴대형 외과기구의 핸들 또는 근위부와 같은 휴대형 외과기구의 임의의 위치에 장착된 임의의 수의 다른 적합한 시각적 표시기를 포함할 수 있는 것으로 고려된다. 다른 실시예에서, 휴대형 외과기구는 시각적 표시기를 포함하지 않을 수 있다.
휴대형 외과기구(10)는 이벤트와 관련된 임의의 수의 조건을 감지하고 그립 이벤트 신호를 생성하도록 구성된 하나 이상의 센서를 더 포함할 수 있다. 이 예시적인 실시예에서, 이벤트는 파편이 상기 외과용 엔드 이펙터의 모션을 방해하며 킥백이 외과용 엔드 이펙터로부터 상기 트랜스미션 및 상기 모터를 통해 상기 사용자에게 토크를 전달하도록, 상기 외과용 엔드 이펙터가 시술 기능을 수행하기 위하여 작동되는 동안 상기 외과용 엔드 이펙터(12)가 바인딩되고, 핀칭되고 또는 오정렬될 때의 그립 이벤트이다. 예를 들어, 그립 이벤트는, 파편이 회전을 방해하거나 외과용 엔드 이펙터(12)의 다른 절단 모션 및 킥백이 사용자를 불편하게 하고 휴대형 외과기구(10)에 대한 사용자의 제어 능력을 감소시키도록 고밀도 뼈 내에 드릴링을 할 때 외과용 엔드 이펙터가 바인딩되고, 핀칭되고 또는 오정렬되는 것을 포함할 수 있다. 휴대형 외과기구(10)는 이벤트와 관련된 2개의 조건을 감지하고 이하에 기재된 바와 같이 이러한 조건을 표시하는 제 1 및 제 2 이벤트 신호(ES1, ES2)(도 4b 및 4c에 도시됨)를 생성하도록 구성된 제 1 및 제 2 센서(30, 32)를 포함할 수 있다.
이 예시적인 실시예에서, 제 1 센서(30)는 휴대형 외과기구(10)의 각속도에서의 회전을 감지하고 이와 관련된 제 1 이벤트 신호(ES1)를 생성하도록 구성된 자이로스코프(gyroscope)(36)를 포함할 수 있다. 제 2 센서(32)는 구동 시스템(18)에 공급된 전류를 감지하여 시술 기능을 수행하기 위해 외과용 엔드 이펙터(12)에 토크를 전달하도록 구동 시스템(18)을 작동시키도록 구성된 전류 센서(38)를 포함하고 전류 센서(38)는 그와 관련된 제 2 이벤트 신호(ES2)를 생성할 수 있다. 휴대형 외과기구는 1개, 3개, 4개, 5개 이상의 센서를 포함할 수 있는 것으로 고려된다. 휴대형 외과기구는 배터리 부족, 구동 시스템 미끄러짐 또는 임의의 다른 이벤트와 관련된 상태를 감지하도록 구성된 다른 적합한 센서를 포함할 수 있다. 그립 이벤트, 즉 킥백 이벤트의 감지는 임의의 적절한 방식으로 달성될 수 있으며, 이는 본원에 그 전체가 참조로서 포함되고 2010년 3월 23일자로 발행된 미국 특허 제 7,681,659 호 회전 속도 센서를 갖는 파워 툴 안티 킥백 시스템에 기재된 킥백을 감지하는 방법 및 하드웨어에 기재된다.
이하에서 상세히 설명되는 바와 같이, 컨트롤러(20)는 각각의 센서로부터 그립 이벤트 신호를 수신하기 위해 각각의 센서와 작동 가능하게 체결되고, 컨트롤러(20)는 이를 기초로 그립 이벤트를 결정하도록 구성된다. 컨트롤러(20)는 또한 휴대형 외과기구의 누적 백래시 내에서 제 1 및 제 2 방향으로 구동 시스템(18)을 진동하여 외과용 엔드 이펙터(12)가 시술 기능을 수행하지 않으면서 피드백 기능을 수행하도록 구성된다. 도 5b에 도시된 바와 같이, 누적 백래시는 모터-트랜스미션 인터페이스(1000)에서의 백래시, 모터(24)에 통합된 구동 부재들 사이의 인터페이스에서의 백래시, 트랜스미션(26)의 기어들 간의 인터페이스(1002, 1008)에서의 백래시, 및 트랜스미션-출력 부재 인터페이스(1004)에서의 백래시를 포함할 수 있다. 도 5b에 도시된 바와 같이, 휴대형 외과기구가 클러치를 포함하는 실시예에서, 누적 백래시는 트랜스미션-클러치 인터페이스(1004)에서 백래시를 포함할 수 있다(도 28a).
일 실시예에서, 컨트롤러(20)는 코일(48)에 공급되는 전류를 제어하고 구동 시스템의 모터 샤프트(42)를 진동시켜 회전식 외과용 엔드 이펙터(12)를 회전시키지 않고 피드백 기능을 수행하도록 구성될 수 있다. 컨트롤러(20)는 모터(24), 트랜스미션(60), 클러치, 출력 부재(16), 또는 휴대형 외과기구의 구성 요소들 사이의 인터페이스에서 각각의 백래시 내에서 또는 외과용 엔드 이펙터(12)를 움직이지 않고 시술 기능을 수행하는 동안 피드백 기능을 수행하기 위해 외과기구 또는 구성 요소 내부의 백래시 내에 있는 휴대형 외과기구의 다른 적절한 부분을 선택적으로 정류하기 위해 코일(48)에 공급되는 전류를 제어하도록 구성된다.
예를 들어, 코일(48)에 공급된 전류는 모터(24)를 완전히 정류하고 시술 기능을 수행하기 위한 자속을 생성하기에는 불충분할 수 있지만, 전류는 모터(24)를 부분적으로 정류하고 피드백 기능을 수행하기에 충분할 수 있다. 모터(24)가 피드백 기능을 수행할 때, 회전자(44)는 이격된 코일들(48) 사이에서 제 1 및 제 2 방향으로 앞뒤로 진동할 수 있고, 이에 의해 BLDC 모터(24)는 충분한 토크 및 커플러(14)에 구동 시스템을 통해 회전 이동을 적용하고 외과용 엔드 이펙터(12)를 이동시키지 않고 햅틱 피드백(FB)을 발생시키기 위해 "진동"하게 한다. 회전자(44)가 진동하는 주파수에 따라, 회전자(44)에 의해 생성된 피드백은 가청 피드백 및/또는 햅틱 피드백일 수 있다.
이전 예를 계속하면, 회전자(44)는 상이한 유형의 햅틱 피드백을 생성하기 위해 상이한 미리 결정된 주파수, 지속 시간 등에서 진동하도록 구성될 수 있다. 당업자는 가청 피드백이 사람의 귀에 의해 감지될 수 있는 주파수 범위 내에서 발생한다는 것을 이해할 것이다. 더욱이, 회전자(44)의 진동과 같은 구동 시스템의 진동은 서로 다른 세기의 가청 피드백 및 햅틱 피드백을 동시에 생성할 수 있음을 이해할 것이다. 예를 들어, 회전자(44)에 의해 생성된 피드백(FB)은 아래에서보다 상세히 설명되는 바와 같이 휴대형 외과기구(10)의 핸드 그립 또는 핸들에서 사용자에 의해 변환되고 느껴지는 진동으로서 실현되는 비교적 조용한 허밍 소리 또는 윙윙거리는 소음과 같이 가청 피드백으로서 실현되는 햅틱 피드백일 수 있다. 반대로, 회전자(44)에 의해 생성된 피드백은 비교적 큰 톤으로서 실현되는 가청 피드백일 수 있고, 또한 입력 장치(22)에서 사용자에 의해 필연적으로 느껴지는 진동으로 실현되는 햅틱 피드백으로서도 가능하다.
모터 출력 영역(42)과 트랜스미션 입력 영역(27)은 모터-트랜스미션 인터페이스에서 서로 접속하며, 이는 도 5b에 도시된 모터-트랜스미션 인터페이스(1000)로서 구현될 수 있다. 모터-트랜스미션 인터페이스(1000)는 모터-트랜스미션 백래시를 가져서 모터-트랜스미션 백래시 내의 모터 출력 영역(42)의 구동이 피드백 기능을 수행하고 시술 기능을 수행하도록 촉각 피드백을 제공하면서 회전식 외과용 엔드 이펙터(12)의 회전을 수행하지 않는다.
도 4a를 참조하면, 컨트롤러(20)는 입력 장치(22)로부터 입력 신호(IS)를 수신하기 위해 입력 장치(22)와 전기 통신한다. 입력 신호(IS)에 기초하여, 컨트롤러(20)는 사용자에 의해 명령된 시술 기능(OF)을 결정할 수 있고, 컨트롤러(20)는 시술 기능(OF)과 관련된 시술 신호(OS)를 생성할 수 있다. 구동 시스템(18)은 컨트롤러(20)로부터 시술 신호(OS)를 수신하고 모터(24)를 완전히 정류하고 커플러(14)를 통해 외과용 엔드 이펙터(12)에 토크를 전달하여 관련된 시술 기능(OF)을 수행하기에 충분한 전류를 코일에 공급할 수 있다.
입력 장치(22)는 제 1 및 제 2 가변 속도 트리거 버튼(34a, 34b)을 포함할 수 있다. 제 1 가변 속도 트리거 버튼(34a)은 제 2 가변 속도 트리거 버튼(34b)을 누르지 않고 완전히 눌려 질 수 있어서, 입력 장치(22)는 컨트롤러(20)에 의해 수신된 관련 입력 신호(IS)를 생성한다. 입력 신호(IS)에 기초하여, 컨트롤러(20)는 사용자에 의해 명령된 시술 기능(OF)이 제 1 방향으로 드릴링 또는 리밍하기 위한 최고 속도 및/또는 최고 토크이며 컨트롤러(20)는 입력 신호(IS)에 기초하여 시술 신호(OS)를 생성할 수 있는 것으로 결정할 수 있다. 반대로, 제 1 가변 속도 트리거 버튼(34a)을 누르지 않고 제 2 가변 속도 트리거 버튼(34b)을 완전히 눌렀을 때, 입력 장치(22)는 컨트롤러(20)에 의해 수신된 다른 입력 신호(IS)를 생성할 수 있다. 이 입력 신호(IS)에 기초하여, 컨트롤러(20)는, 사용자에 의해 명령된 시술 기능(OF)이 제 1 방향과 반대인 제 2 방향으로 최고 속도 및/또는 최고 토크 드릴링 또는 리밍이라고 결정할 수 있고, 컨트롤러(20)는 연관된 시술 신호(OS)를 생성할 수 있다. 버튼들(34a, 34b) 중 하나 또는 둘 모두는 다른 입력 신호들(IS)을 생성하기 위해 부분적으로만 눌려 질 수 있고, 이러한 입력 신호들(IS)에 기초하여, 컨트롤러(20)는 사용자에 의해 명령된 시술 기능(OF)이 최고-속도 및/또는 최고-토크 드릴링 또는 리밍보다 적다고 결정할 수 있다. 다른 실시예들에서, 컨트롤러(20)는 연관된 휴대형 외과기구(10)에 대해 사용자에 의해 명령된 임의의 수의 다른 시술 기능들(OF)을 결정할 수 있고 컨트롤러(20)는 입력 신호(IS)에 기초하여 연관된 시술 신호(OS)를 생성할 수 있다. 구동 시스템(18)은 컨트롤러(20)로부터 시술 신호(OS)를 수신할 수 있어서, 구동 시스템(18)은 커플러(14)를 통해 토크를 외과용 엔드 이펙터(12)로 전달하여 관련 시술 기능(OF)를 수행하도록 작동된다.
도 4b 및 도 4c를 참조하면, 컨트롤러(20)는 센서(30, 32)로부터 이벤트 신호(ES1, ES2)를 수신하고 이벤트 신호(ES1, ES2)에 기초하여 피드백 신호(FS)를 생성하기 위해 센서(30, 32)와 더 전기적으로 통신할 수 있다. 이전 예와 계속해서, 센서(30, 32)는 휴대형 외과기구(10)의 측정된 각속도 및 공급된 전류와 각각 연관된 제 1 및 제 2 이벤트 신호(ES1, ES2) 및 배터리에서 모터(24)로 공급된 전류를 생성하도록 구성된 자이로스코프(36) 및 전류 센서(38)를 포함할 수 있다.
제 1 이벤트 신호(ES1)에 기초하여, 컨트롤러(20)는 휴대형 외과기구(10)가 초당 500°의 임계 각속도로 회전하고 있다고 결정할 수 있다. 컨트롤러는 그립 이벤트와 관련된 임계 각속도가 초당 500도 이상일 수 있다고 결정할 수 있다. 다른 실시예에서, 컨트롤러(20)는 자이로스코프(36)가 제 1 임계 각속도와 동일한 각속도를 측정할 때 그립 이벤트가 발생했다고 판단할 수 있고, 컨트롤러(20)는 자이로스코프가 제 1 스레스홀드 각속도와 상이한 제 2 스레스홀드 각속도와 동일한 각속도를 측정할 때 그립 이벤트가 종료된 것으로 결정할 수 있다.
제 2 이벤트 신호(ES2)에 기초하여, 컨트롤러(20)는 배터리(50)로부터 구동 시스템(18)으로 전류가 공급되고 있음을 결정할 수 있다. 전류 센서(38)는 그립 이벤트와 관련된 외과용 엔드 이펙터(12)의 회전 또는 다른 절단 운동을 나타내는 제 2 이벤트 신호(ES2)를 생성하기 때문에 전류 센서(38)는 그립 이벤트의 오감지를 방지하기 위해 자이로스코프(36)와 조합하여 사용될 수 있다. 특히, 자이로스코프(36)가 전류 센서(38)의 도움없이 단독으로 작용한다면, 자이로스코프(36)는 외과용 엔드 이펙터(12)를 회전시켜서 그립 이벤트의 가능성을 생성하기 위하여 배터리로부터 구동 시스템(18)으로 전력을 공급하도록 구동되는 예를 들어 버튼과 같은 입력 장치(22) 없이 그립 이벤트와 같은 미리 결정된 각속도에서 공기 중에서 휴대용 외과기구(100)가 단순히 흔들릴(waved) 때 그립 이벤트를 잘못 감지할 수 있다. 이러한 결정을 고려하여, 컨트롤러(20)는 그립 이벤트가 발생했다고 결정하고 피드백 신호(FS)를 생성할 수 있다.
도 4b를 참조하면, 컨트롤러(20)는 시술 기능(OF)을 수행하기 위해 외과용 엔드 이펙터(12)에 전달된 토크를 발생시키기 위해 구동 시스템(18)을 작동시키지 않고 피드백 기능(FF)을 수행하기 위해 구동 시스템(18)을 작동시키기 위해 피드백 신호(FS)를 생성할 수 있다. 특히, 컨트롤러(20)가 미리 결정된 이벤트와 관련된 입력 신호(IS) 및 제 1 및 제 2 이벤트 신호(ES1, ES2)를 동시에 수신할 때, 컨트롤러(20)는 시술 신호(OS)를 생성하지 않는다. 오히려, 컨트롤러(20)는 피드백 기능(FF)을 수행하기 위해 구동 시스템(18)을 작동시키기 위해 피드백 신호(FS)만을 생성하고 시술 기능(OF)을 종료할 수 있다. 시술 기능(OF)은 구동 시스템(18)을 정지시킴으로써 종료될 수 있다. 예를 들어, 브레이크 장치(미도시)는 컨트롤러(20)가 그립 이벤트가 있으며, 제 1 및 제 2 센서(30, 32)로부터의 제 1 및 제 2 이벤트 신호(ES1, ES2)에 기초하여 발생되었다고 결정할 때, 구동 시스템(18)의 운동을 늦추거나 적어도 일시적으로 정지시키기 위해 이용될 수 있다.
시술 신호(OS)는 구동 시스템(18)을 작동시켜 관련된 시술 기능(OF)을 수행하기 위해 토크를 발생시키기에 충분한 임의의 적절한 구성을 포함할 수 있지만, 피드백 신호(FS)는 시술 기능(OF)을 수행하기 위해 필요한 토크를 발생시키기 위해 구동 시스템(18)을 작동시키지 않는다. 달리 말하면, 컨트롤러(20)는 시술 기능(OF)(도 4a 참조)을 수행하기 위해 외과용 엔드 이펙터(12)에 전달된 토크를 발생시키기 위해 구동 시스템(18)을 작동시키고 하나 이상의 피드백 기능(FF)을 수행하도록 구동 시스템(18)을 독립적으로 작동시키도록 구성된다(도 4b 및 4c 참조). 이전의 비제한적인 예를 계속하면, 시술 신호(OS)는 휴대형 외과기구(10)와 관련된 최고 토크 및/또는 최고 속도 드릴링 및 리밍과 관련될 수 있다. 이 시술 신호(OS)는, 구동 시스템(18)에 휴대형 외과기구(10)와 관련된 최고 토크 및 최고 드릴링 및 리밍을 수행하기 위해 필요한 토크를 외과용 엔드 이펙터로 전달하기 위해 배터리(50) 또는 다른 전원으로부터 최대의 인발이 공급되어야 하는 것을 요할 수 있다. 피드백 신호(FS)는 구동 시스템(18)에 배터리(50) 또는 다른 전기 소스로부터의 최대 이용 가능한 인발의 10분의 1인 배터리(50)로부터 인발을 제공받는 것을 요할 수 있고 피드백 신호(FS)는 구동 시스템(18)에 배터리(50) 또는 다른 전기 소스로부터의 최대 이용 가능한 인발의 거의 10분의 1이 공급되는 것을 요구할 수 있다.
구동 시스템(18)은 구동 시스템(18)이 컨트롤러(20)로부터 피드백 신호(FS)를 수신할 때, 회전자(44)를 제 1 및 제 2 방향으로 진동시킴으로써 사용자에게 피드백을 제공하기 위해 피드백 기능(FF)을 수행하도록 구성될 수 있어서 구동 시스템(18)은 햅틱 피드백을 제공하기 위해 휴대형 외과기구(10)를 진동시킨다. 햅틱 피드백은 그립 이벤트가 발생하고 사용자, 환자 및 휴대형 외과기구를 보호하기 위해 컨트롤러(20)가 시술 기능(OF)을 종료했음을 사용자에게 표시할 수 있다. 또한, 햅틱 피드백은 배터리 부족 또는 방전 또는 휴대형 외과기구(10)의 임의의 손상으로 인해 시술 기능(OF)이 종료되지 않았다는 것을 사용자에게 표시할 수 있다.
이전 예와 계속해서, 구동 시스템(18)은 컨트롤러(20)로부터 피드백 신호(FS)를 수신한 것에 답하여 피드백 기능(FF)을 수행할 수 있다. 시술 신호(OS)는 모터(24)를 정류하여 회전자를 완전히 회전시키고 이어서 모터(24)를 구동하여 외과용 엔드 이펙터(12)에 전달된 회전 토크를 발생시켜 시술 기능(OF)을 수행하되 피드백 신호(FS)는 모터(24)를 동일한 방식으로 완전히 정류하기에 불충분할 수 있다. 피드백 신호는 그립 이벤트 이외의 이유로 햅틱 피드백(HF)을 생성하고 피드백 기능(FF)을 수행하기 위해 모터(24)를 진동시키기에 충분할 수 있다.
컨트롤러(20)는 사용자에게 상태 조건을 나타내는데 사용될 수 있는 햅틱 피드백(HF)을 생성하도록 구동 시스템(18)을 제어하도록 구성될 수 있다. 비 제한적인 예로서, 햅틱 피드백(HF)은 휴대형 외과기구(10)의 진단 및/또는 서비스 모드와 관련되어 유리하게 구현될 수 있는, 구동 시스템(18)의 적절한 기능성 및 배터리(50)의 충전 상태를 검증하면서 그립 이벤트를 표시하도록 사용될 수 있다. 일 실시예에서, 컨트롤러(20)는 복수의 상이한 햅틱 파형을 생성하도록 구성될 수 있으며, 이는 상응하게 상이한 햅틱 피드백(HF)을 생성하도록 상이한 주파수, 지속 시간, 강도 등에서 구동 시스템(18)을 진동시킴으로써 피드백 기능(FF)을 수행하는 데 사용될 수 있다. 구동 시스템(18)에 의해 생성된 특정 유형의 햅틱 피드백(HF)은 다수의 상이한 유형의 촉각 피드백(FB)을 사용자에게 제공하기 위해 사용될 수 있고, 따라서 휴대형 외과기구(10)는 사용중인 기능성이 향상될 수 있는 이점이 있다. 예시로서, 햅틱 피드백(HF)은 구동 시스템의 시술 기능이 종료될 때 그립 이벤트 동안 입력 장치(22)의 활성화를 나타내기 위해 사용자를 향한 진동의 짧은 "버스트(burst)"로서 구현될 수 있다. 예를 들어, 컨트롤러는 사용자가 입력 신호를 생성하기 위해 입력 장치(22), 예를 들어 버튼을 작동시키는 것과 동일한 시간 동안 피드백 기능(FF)을 구현할 수 있다. 그러나, 피드백 기능(FF)의 지속 시간은 입력 장치(22)가 사용자에 의해 작동되는 시간보다 길거나 짧을 수 있다.
도 4c를 참조하면, 컨트롤러(20)는 피드백 신호(FS)를 비촉각 표시기로 더 전송할 수 있다. 이 비제한적인 예에서, 컨트롤러(20)는 컨트롤러(20)가 제 1 및 제 2 이벤트 신호들(ES1, ES2)에 기초하여 이벤트를 결정할 때 피드백 신호(FS)를 시각적 표시기(28)로 전송하여 시각적 표시기(28)를 작동시켜 피드백(FB)을 제공할 수 있다. 시각적 표시기(28)가 발광기(70) 및/또는 링형 광 가이드(72)를 포함하는 경우, 피드백 신호(FS)는 발광기(70)를 작동시켜 링형 광 가이드(72)의 전체 또는 일부를 통해 일정한 광을 방출할 수 있다. 그러나, 피드백 신호(FS)는 일정한 또는 불규칙적인 미리 결정된 주파수에서 광을 간헐적으로 방출하기 위해 발광기(70)를 작동시킬 수 있다. 피드백 신호(FS)는 이벤트와 관련된 피드백을 나타내는 하나 이상의 컬러를 방출하도록 발광기를 작동시킬 수 있다. 예를 들어, 피드백 신호(FS)는 킥백 또는 그립 이벤트를 나타내기 위해 간헐적으로 적색광을 방출하도록 구동 트레인(18)의 미끄러짐을 나타내기 위해 간헐적으로 황색 광을 방출하거나, 또는 배터리 부족을 나타내기 위해 계속해서 적색을 방출하도록 발광기를 작동시킬 수 있다. 컨트롤러(20)는 임의의 주파수에서 임의의 컬러를 방출하도록 발광기를 작동시키기 위해, 다른 구성을 갖는 다른 시각적 표시기를 작동시키기 위해 또는 다른 유형의 촉각 표시기를 작동시켜서 임의의 유형의 피드백(FB)을 사용자에게 제공하기 위해 다른 피드백 신호(FS)를 생성할 수 있다.
컨트롤러(20)는 구동 시스템(18)의 동작 및/또는 구동 시스템(18)을 통한 입력 신호(IS), 피드백 신호(FS) 및/또는 동작 신호의 생성을 제어하기 위해 명령을 처리하거나 메모리에 저장된 알고리즘을 처리하기 위한 하나 이상의 마이크로프로세서를 가질 수 있다. 부가적으로 또는 대안적으로, 컨트롤러(20)는 하나 이상의 마이크로 컨트롤러, 필드 프로그램 가능 게이트 어레이, 시스템 온 칩, 개별 회로 및/또는 본 명세서에 기술된 동작 및 피드백 기능(OF, FF)을 수행할 수 있는 다른 적절한 하드웨어, 소프트웨어 또는 펌웨어를 포함할 수 있다.
컨트롤러(20)는 별도의 파형 또는 출력 신호의 형태로 시술 신호(OS) 및 피드백 신호(FS)를 생성할 수 있다. 시술 신호(OS) 및 피드백 신호(FS)는 펄스 폭 변조 신호일 수 있다. 그러나, 이들 신호는 시술 기능을 수행하기 위해 구동 시스템(18)을 구동하고 피드백 기능(FF)을 수행하기 위해 구동 시스템(18)을 진동시키고 전술한 바와 같이 피드백(FB)을 제공하기에 충분한 임의의 유형 또는 구성일 수 있다.
도 5A, 5B, 6A 및 6B는 일 실시예에 따라 구성된 회전식 휴대형 외과기구(200)를 도시한다. 다른 구성도 가능하다는 것을 이해해야 한다. 휴대형 외과기구(200)는 모터(204) 내에 안착되는 하우징(202)을 갖는다. 휴대형 외과기구(200)의 일 실시예에서, 모터(204)는 DC 모터이다. 다른 실시예에서, 모터(204)는 AC 모터, 또는 공압식 또는 유압 구동식 모터일 수 있다. 모터(204)는 모터 출력 영역(206)에서 회전 출력 샤프트를 갖춘다. 휴대형 외과기구 하우징(202)은 모터(204)가 장착되는 대체로 원통형인 헤드(208)를 갖도록 형성된다.
트랜스미션(216)은 모터 출력 영역(206)의 원위에 위치한 노출된 전방 단부에 연결된다. 트랜스미션(216)은 모터 출력 영역(206)에 의해 출력되는 회전 모멘트의 속도를 감소시키고 토크를 증가시키는 기어를 포함한다. 트랜스미션(216)은 2개의 회전 구동 헤드(266, 272)를 갖는다(도 7-8에 도시됨). 트랜스미션(216)은 형성하는 기어의 배치로 인해, 모터 출력 영역(206)의 회전은 구동 헤드(266, 272)가 상이한 속도로 동시에 회전하게 한다. 트랜스미션(216)은 따라서 2개의 개별 속도로 회전력을 출력하는 감속 조립체로서 기능한다.
휴대형 외과기구(200)는 트랜스미션 출력 영역에 작동 가능하게 결합되는 클러치 입력 영역을 규정하는 클러치(224)를 더 포함하여 트랜스미션 출력 영역의 구동이 클러치 입력 영역의 구동을 발생시키도록 구성된다. 제 1 위치의 클러치는 제 1 트랜스미션-클러치 백래시를 갖는 제 1 트랜스미션-클러치에서 2개의 기어 세트들 중 하나와 클러치 입력 영역을 접속하도록 구성되어서, 제 1 트랜스미션-클러치 백래시내의 트랜스미션 출력 영역의 구동이 클러치 입력 영역의 구동을 발생시키지 않는다. 제 2 위치의 클러치는 제 2 트랜스미션-클러치 백래시를 갖는 제 2 트랜스미션-클러치 인터페이스에서 2개의 기어 세트 중 다른 하나와 클러치 입력 영역을 접속하도록 구성될 수 있어서, 제 2 트랜스미션-클러치 백래시내의 트랜스미션 출력 영역의 구동은 클러치 입력 영역의 구동을 유발하지 않는다.
예시적인 실시예에서, 클러치 입력 영역은 기어 세트 또는 구동 헤드(도 8, 266, 272)의 형태로 구현될 수 있는 트랜스미션 출력 영역에 작동 가능하게 결합된 핀(도 6b, 364)의 형태로 구현될 수 있으므로 구동 헤드의 구동이 핀(364)의 구동을 발생시키도록 구성된다. 핀(364)은 두 기어 세트(266, 272) 중 하나가 핀(364)에 작동 가능하게 결합되고 핀(364)의 구동을 유발하도록 구성되는 제 1 위치로 이동 가능하다. 핀(364)은 두 기어 세트(266, 272) 중 다른 하나가 핀(364)에 작동 가능하게 결합되고 핀(364)의 구동을 유발하도록 구성되는 제 2 위치로 더 이동 가능하다. 클러치(224)는 출력 부재에 작동 가능하게 결합된 클러치 출력 영역을 추가로 규정한다.
트랜스미션 출력 영역과 클러치 입력 영역은 트랜스미션-클러치 백래시를 갖는 적어도 하나의 트랜스미션-클러치 인터페이스에서 서로 접속하여 적어도 하나의 트랜스미션-클러치 백래시 내에서 트랜스미션 출력 영역의 구동은 클러치 입력 영역의 구동을 발생시키지 않도록 한다. 이전 예를 계속하면, 클러치 입력 영역(도 6b, 364)이 트랜스미션 출력 영역의 2개의 구동 헤드(266, 272) 중 하나와 체결되는 위치에 있을 때, 핀(364)과 (도 5b에 도시되는 바와 같이) 백래시 인터페이스(1004)에서 구동 헤드(266) 또는 구동 헤드(272) 사이에 백래시가 존재할 것이다.
클러치 출력 영역은 (도 6a에 도시된) 스핀들(222)을 통해 출력 부재를 구동할 때 출력 부재에 정적으로 고정될 수 있다. 클러치 입력 영역의 핀과 트랜스미션 출력 영역의 구동 헤드 사이의 인터페이스에서 백래시가 발생할 수 있다. 백래시는 클러치, 예를 들어, 핀(도 6b, 222) 및 클러치 출력 영역(도 12, 304) 내부에서 발생할 수 있다.
도 5b, 6a 및 6b를 참조하면, 스핀들(222)은 트랜스미션(216)의 전방에 하우징에 회전 가능하게 장착된다. 클러치(224)는 2개의 트랜스미션 구동 헤드(266, 272) 중 하나를 스핀들(222)에 선택적으로 연결하여 스핀들과 연결된 드라이브 헤드가 일제히 회전하게 한다.
마운트(226)는 속도 변경 외과용 부착물(500)(도 28a에 도시됨) 또는 외과용 엔드 이펙터(228)(도 27에 도시됨)의 형태인 커플러를 출력 부재의 스핀들(222)에 해제 가능하게 홀드한다. 도 28a의 실시예에서, 외과용 엔드 이펙터(228)는 비구형 리머로서 구현될 수 있다. 그러나, 외과용 엔드 이펙터의 다른 실시예가 고려된다. 외과용 엔드 이펙터(228)는 원위 단부 조직 작업 헤드(230)를 가지며, 이는 비구형(acetabular) 리머 헤드의 형태로 구현될 수 있다. 조직 작업 헤드(230)로부터 근위로 연장되는 외과용 엔드 이펙터(228)는 세장된(elongated) 샤프트(132)를 갖는다. 장착 헤드(234)는 샤프트(232)의 근위 단부에 부착된다. 커플링 헤드(234)는 외과용 엔드 이펙터(228)의 스핀들(222)에 대한 회전 결합을 용이하게 하고 휴대형 외과기구(200)에 대한 엔드 이펙터의 워블을 최소화하는 기하학적 특징으로 형성된다.
휴대형 외과기구(200)는, 스핀들(222)의 원위 단부가 부착물/엔드 이펙터 커플링 헤드(234)(도 7에 도시됨)를 수용하기 위한 보어(300)(도 11에 도시됨)로 형성되도록 구성된다. 커플러(226)는 스핀들 보어(300)에서 엔드 이펙터 커플링 헤드(234)를 고정한다. 이 결합의 결과로서, 커플링 헤드(234), 따라서 외과용 엔드 이펙터(228) 전체가 스핀들(222)과 함께 회전한다.
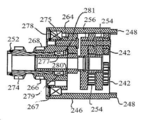
이제, 도 6a, 8 및 9를 참조하여 설명된 트랜스미션(216)은 3개의 유성 기어(242)(2개 도시)의 제 1 세트를 포함한다. 유성 기어(242)는 각각 대체로 디스크형 유성 캐리어(244)에 회전 가능하게 장착된다. 유성 기어(242) 및 유성 캐리어(244)는 트랜스미션(216)의 나머지 유성 기어 및 유성 캐리어와 마찬가지로 일반적으로 관형 링 기어(246)에 수용된다. 링 기어(246)는 매끄러운 외벽 및 톱니형 내벽(톱니 미도시)을 갖는다. 유성 기어(242)의 톱니와 나머지 유성 기어(254, 262)의 톱니는 링 기어(146)의 톱니와 체결된다.
링 기어(246)는 모터(204)의 전방으로 휴대형 외과기구 하우징 헤드(208)에 정적으로 장착된다. 링 기어(246)의 정적인 장착을 용이하게 하기 위해, 링 기어는 2개의 근접하게 연장되는 풋(foot)(248)으로 형성된다. 링 기어의 회전을 차단하기 위해 하우징의 내부 구조 웨브(250) 내에 형성된 개구에 풋이 안착된다(개구는 식별되지 않음).
유성 기어들(242)은 모터 출력 영역(206) 위에 배치된 피니언 기어(251) 위에 안착되고 체결한다(도 6a에 식별됨). 따라서, 모터 출력 영역(206)의 회전은 유성 기어(242) 및 유성 캐리어(244)의 회전을 발생시킨다.
제 1 선 기어(252)는 유성 캐리어(244)에 일체로 장착된다. 이 실시예에서, 제 1 선 기어(252)는 유성 캐리어(244)와 동심으로 위치되고 유성 캐리어(244)로부터 원위로 연장된다. 선 기어(252)는 제 2 세트의 3개의 유성 기어(254)(2개 도시)와 체결된다. 유성 기어(254)는 제 2 유성 캐리어(256) 주위에 회전 가능하게 배치된다. 관형 포스트(258)는 제 2 유성 캐리어(256)와 일체로 부착되고, 동심이며 원위로 전방으로 연장된다. 포스트(258)의 근위 단부 베이스 주위에 배치된 톱니 세트는 제 2 선 기어(260)를 형성한다.
제 2 선 기어(260)는 제 3 유성 기어 세트, 4개의 유성 기어(262)(하나는 도시됨)와 체결한다. 유성 기어(262)는 제 3 유성 캐리어(264)에 회전 가능하게 부착되고 그 주위에 배치된다. 제 1 구동 헤드(266)는 제 3 유성 캐리어와 일체로 형성되고 축 방향 전방으로 연장된다. 제 1 구동 헤드(266)는 대체로 원형인 외부 프로파일을 갖는다. 구동 헤드(266)의 외부 표면은 복수의 종방향으로 연장되는 내향으로 오목한 노치(268)를 갖도록 더 형성된다. 원주 방향으로 이격된 노치(268)는 구동 헤드(266)의 원주 전체 주위에 위치된다. 유성 캐리어(264)는 축방향으로 연장하는 스루 보어(270)를 갖도록 더 형성된다. 보어(270)는 유성 캐리어(264)와 구동 헤드(266) 모두를 통해 완전히 연장된다.
제 2 구동 헤드(272)는 구동 헤드(266)의 원위 전방에 그리고 동심으로 위치된다. 구동 헤드(272)는 구동 헤드(266)와 동일한 외경을 갖는다. 구동 헤드(272)는 제 1 구동 헤드(266)의 동일한 프로파일의 노치(268)를 갖는 노치(274)를 규정한다. 관형 스템(276)은 구동 헤드(272)로부터 근위 후방으로 연장된다. 본 발명의 많은 실시예에서, 제 2 구동 헤드(272)와 스템(276)은 일체로 형성된다. 트랜스미션(216)이 조립될 때, 제 2 유성 캐리어(256)의 포스트(258)는 제 3 유성 캐리어(264) 및 구동 헤드(266)의 보어(270)에 배치된다. 스템(276)은 보어(270)에 유사하게 배치된다. 보다 구체적으로, 스템(276)은 포스트(258) 위에서 단단히 압입되도록 치수 설정된다. 따라서, 구동 헤드(272)는 제 2 유성 캐리어(256)와 함께 회전한다. 집합적으로, 포스트(278) 및 스템(276)은 구동 헤드(266, 272) 사이에 종방향 분리가 있도록 형성된다.
구동 헤드(266) 및 스템(276)은, 스템의 외부 표면이 구동 헤드의 내벽을 형성하는 인접한 보어(270)의 내측으로 이격되도록 추가로 집합적으로 형성된다. 이 배열은 스템(276)이 구동 헤드(268)에 대해 자유롭게 회전할 수 있게 한다. 스템(276)의 근위 단부에 인접하여, 베어링 조립체(277)는 포스트(258)와 유성 캐리어(264) 내부의 인접한 내부 원형 벽 사이에서 연장된다. 더 구체적으로 베어링 조립체(277)의 외부 레이스가 안착된 유성 캐리어 내벽이 유성 캐리어 보어(270)와 동심이며 더 큰 외경을 갖는 세장된 그루브(279)를 규정하는 베어링 조립체(277)에 근위에 배치된 유지 링(280)이 베어링 조립체를 제 위치에 홀드한다. 유지 링(280)은 유성 캐리어(260)의 내부에도 형성된 그루브(281)에 스냅 끼워 맞춤된다. 유성 캐리어(264)는 그루브(281)가 보어(270)의 근위 단부 개구와 그루브(279) 사이에 있고 그루브(279)보다 큰 직경을 갖도록 형성된다.
구동 헤드(272)는 노즈(271)를 갖는다. 노즈(271)는 노치(274)로 형성된 구동 헤드의 일부 전방으로 연장된다. O-링(269)은 노즈(271) 위에 배치된다. O-링(269)은 노치(274)를 규정하는 노즈 부분에 바로 원위인 구동 헤드 노즈(271) 부분 위에 장착된다.
베어링 조립체(275)는 유성 캐리어(264)를 정적 링 기어(246)에 회전 가능하게 홀드한다. 베어링 조립체(275)는 링 기어(246)의 개방 단부를 형성하는 카운터 보어(247)의 둘레에 안착된 외부 레이스(미도시)를 갖는다. 베어링 조립체(275)(미도시)의 내부 레이스는 제 3 유성 캐리어(264)의 외부 둘레에 형성된 환형 스텝(278)에 안착된다. 지지 링(267)은 베어링 조립체(275)를 유지하고, 연장에 의해 링 기어에서 기어 트레인(216)의 이동 구성 요소를 유지한다. 유지 링(267)은 카운터 보어(247)를 형성하는 링 기어(246)의 내벽에 규정된 그루브(273)에 스냅 끼워 맞춤된다.
도 5b에 도시된 바와 같이, 모터 출력 영역은 피니언 기어(251)로서 구현될 수 있고, 이는 제 1 백래시 인터페이스(1000)를 갖는 모터-트랜스미션 인터페이스에서 제 1 유성 기어 세트(242)로서 구현될 수 있는 트랜스미션 입력 영역과 접속할 수 있다. 또한, 이 실시예에서, 트랜스미션은 제 1 선 기어(252)와 제 2 유성 기어(254) 사이에 백래시 인터페이스(1002) 및 제 2 선 기어(260)와 제 3 유성 기어 세트(264) 사이에 백래시 인터페이스(1008)를 가질 수 있다.
도 10 및 도 11을 참조하면, 스핀들(222)은 상이한 직경의 원형 섹션을 갖는 단일 금속 조각의 형태로 구현될 수 있다. 가장 근위 단부에서, 스핀들(222)은 육각형 단면 프로파일을 갖는 보어(284)를 규정하는 헤드(282) 형태의 커플러를 포함한다. 그러나, 보어는 임의의 적합한 형상의 형태로 단면 프로파일을 가질 수 있는 것으로 고려된다. 보어(284)는 외과용 엔드 이펙터(228)에 장착된 외과용 엔드 이펙터 커플링 헤드(234)의 근위 단부를 수용하여 미끄럼 끼워 맞춤되도록 구성된다. 보어(284)를 규정하는 헤드(282)의 내부 표면(285)이 외과용 엔드 이펙터(228)로 토크를 전달하는 표면이기 때문에 밀착 피팅이 요구된다.
헤드(282)로부터 원위로 연장되는 스핀들(222)은 칼라(286)를 갖는다. 칼라(286)는 헤드(282)의 외부 직경보다 큰 외경을 갖도록 형성된다. 칼라(286)의 원위 단부에 바로 인접하여, 칼라는 칼라의 외부 표면 주위에서 원주 방향으로 연장되는 그루브(288)를 갖도록 형성된다. 칼라(286)는 칼라를 통해 측 방향으로 연장되는 개구(290)를 규정하도록 추가로 형성된다. 개구부(290)는 그루브(288)의 베이스를 규정하는 칼라(286)의 아치형 섹션을 통해 연장되도록 위치된다. 개구부(290)는 칼라(286)의 외부 표면으로 절단된 리세스(291)의 베이스로부터 연장된다.
스핀들(222)은 칼라(286)로부터 원위로 돌출하는 스템(292)으로서 형성된 출력 부재를 더 포함한다. 스템(292)은 상이한 외경을 갖는 다수의 섹션을 갖는다. 칼라(286)에 인접한 근위 섹션(293)은 슬리브 헤드(282)의 직경과 대략 동일한 직경을 갖는다. 스템 섹션(293)은 2개의 정 반대로 대향하는 수용 슬롯(294)을 갖도록 형성된다. 각각의 수용 슬롯(294)은 스핀들(222)의 종축에 대해 대각선으로 전방으로 연장하는 평면에 있다. 본 발명의 일부 실시예에서, 각각의 슬롯(294)은 스핀들(222)의 종축에 대해 대략 45°의 각도에 있는 평면에 있다. 따라서, 도 10에 도시된 바와 같이, 슬롯(294)을 정면에서 볼 때, 슬롯(294)은 곡선 프로파일을 갖는 것으로 보인다.
섹션(293)으로부터 멀어지게, 스템(292)은 원주 방향 그루브(296)를 갖도록 더 형성된다. 그루브(296)의 전방으로 스템(292)은 중간 섹션(295)을 갖는다. 섹션(295)은 근위 섹션(293)의 직경보다 약간 작은 직경을 갖는다. 감소된 직경의 스템 섹션(295)은 아래에 설명된 웨이브 스프링(357)(도 26에 도시됨)이 자유롭게 구부러질 수 있게 한다.
섹션(295)의 전방에, 스핀들 스템(292)은 원위 단부 섹션(297)으로 형성된다. 스템 섹션(297)은 섹션(293 및 295)의 직경 사이의 외경을 갖는다.(도 6a에 도시된 바와 같이) 베어링 조립체(353)의 내부 레이스는 섹션(297) 위에 타이트하게 피트된다. 그루브(298)는 스템(292)의 외부 표면 주위에서 원주 방향으로 연장된다. 그루브(298)는 스템 섹션(297)의 원위 단부에 바로 인접하여 위치되며, 이는 또한 스핀들(222)의 원위 단부이다.
스핀들(222)은 또한 원위 단부로부터 스템(292) 및 칼라(286)를 통해 보어(284)로 연장되는 보어(300)를 갖도록 형성된다. 보어(300)는 보어(284)와 동심이며 인접하다. 바람직한 실시예에서, 보어(300)는 항상 그런 것은 아니지만, 원형 십자형을 갖는다. 보어(300)는 후술하는 바와 같이 외과용 엔드 이펙터(228)의 커플링 헤드(234)의 밀착 슬립 피팅을 용이하게 하도록 치수가 정해진다.
핀(301)(도 26에 도시됨)은 스핀들(222)의 종방향 중심 축을 향하도록 스핀들 개구(290)(도 11에 도시됨)에 피트된다. 핀(301)은 보어(300)내에 연장한다.
도 12 및 13을 참조하면, 일반적으로 관형 클러치 출력 영역(304)이 스핀들(222)에 단단히 장착된다. 클러치 출력 영역(304)은 일정한 외경을 가질 수 있다. 클러치 출력 영역(304)은 커플러의 근위 단부로부터 원위 전방으로 연장되는 근위 단부 보어(306)를 갖도록 형성된다. 이 예시적인 실시예에서, 근위 단부 보어(306)는 커플러의 길이를 통해 대략 절반으로 연장된다. 클러치 출력 영역(304)은 또한 클러치 출력 영역의 원위 단부로부터 후방으로 연장되는 원위 단부 보어(308)를 갖는다. 원위 단부 보어(308)는 보어(308) 내의 슬리브 헤드(282)의 압축 피팅을 용이하게 하는 직경을 갖는다.
근위 단부 보어(306)와 원위 단부 보어(308) 사이에서, 클러치 출력 영역(304)은 원형 공극 공간(307)을 갖도록 형성된다. 공극 공간(307)의 외부 둘레는 보어(306, 308) 및 공간(307)을 규정하는 클러치 출력 영역(304)의 내벽으로부터 내향으로 연장되는 원형 플랜지(309)에 의해 규정된다. 플랜지(309)는 슬리브 헤드(282)의 근위 방향의 면이 접하는 말단 방향의 측면 연장된 환형면을 갖는다. 클러치 출력 영역(304)은 4개의 종방향으로 연장되는 슬롯(314)을 갖도록 더 형성된다. 각각의 슬롯(314)은 클러치 출력 영역(304)의 외부 표면으로부터 근위 단부 보어(306) 내로 연장된다. 슬롯(314)들은 클러치 출력 영역(304)의 둘레 주변에서 서로로부터 균일하게 이격된다.
클러치 출력 영역(304) 자체는 스핀들 칼라(286)의 외부 직경보다 약간 큰 외부 직경을 갖도록 형성된다. 스핀들 헤드(282)가 클러치 출력 영역(304)에 삽입될 때, 클러치 출력 영역의 원위 단부면은 스핀들 칼라(286)의 근위 단부 주위에 환형 계단을 형성한다.
도 6a를 다시 참조하면, 외과용 휴대형기구(200)가 조립될 때 스핀들(222) 및 클러치 출력 영역(304) 서브 조립체가 하우징(208)에 장착되어 트랜스미션 출력 영역의 기어 트레인 구동 헤드(266, 272)가 클러치 출력 영역의 근위 단부 보어(306)에 배치되어 있음을 알 수 있다. 클러치 출력 영역(304)은 근위 단부 보어(306)를 규정하는 내벽이 구동 헤드(266, 272)로부터 이격되도록 형성된다. 구동 헤드 노즈(271)는 클러치 출력 영역 공극 공간(307)에 안착된다. O-링(269)은 클러치 출력 영역 플랜지(309)의 인접한 내면에 접한다.
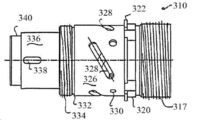
트랜스미션(216), 클러치 출력 영역(304) 및 스핀들(222)은 휴대형 외과기구 하우징(202)의 전방으로부터 원위로 연장되는 회전 하우징(310)에 실질적으로 배치된다. 이제 도 14-16을 참조하여 설명된 회전 하우징(310)이 형성된다. 다수의 원형 단면 섹션을 갖는 단일 금속 조각으로부터 형성된다. 회전 하우징(310)의 가장 근위 섹션은 베이스(312)이다. 회전 섹션의 근위 단부에 인접한 회전 섹션 베이스(312)의 외부 표면에는 나사산(threading)(317)이 형성되어 있다(도 15에만 도시됨). 베이스(312)는 개방 단부 보어(316)로 형성된다. 보어(316)는 트랜스미션 링 기어(246) 위에 베이스의 느슨한 슬립 피팅을 용이하게 하도록 치수가 정해진다. 휴대형 외과기구(200)가 조립될 때, 베이스 나사산(317)은 하우징(208)의 내벽 주변에 형성된 상보적인 나사산(318)에 체결한다(도 6a에 미도시). 이러한 나사 결합 체결은 휴대형 외과기구 하우징(208)에 회전식 하우징(310)을 홀드한다.
나사 섹션의 원위로 연장되는 회전식 하우징 베이스(312)에는 매끄러운 외벽을 갖는 섹션(320)이 형성된다. 베이스 섹션(320)의 전방에서, 회전식 하우징(310)은 베이스(312)의 반경 방향 외측으로 연장되는 플랜지(322)를 갖는다. 플랜지(322)는 하우징이 휴대형 외과기구 하우징(208)에 나사로 고정될 때 회전식 하우징의 근위 운동을 정지시키는 회전식 하우징(310)의 구조적 구성 요소이다. 회전식 하우징(310)은 베이스 섹션(320) 및 플랜지(322)를 통해 연장되는 4개의 슬롯(324)을 규정하도록 추가로 형성된다. 슬롯(324)은 원주 주위에서 서로 균일하게 이격되어 있다. 슬롯(324)은 제조 동안 회전식 하우징(310)을 휴대형 외과기구 하우징(208)에 나사 고정하기 위해 사용되는 체결 도구(미도시)를 수용하기 위한 공간으로서 기능한다.
플랜지(322)의 전방에서, 회전식 하우징(310)은 클러치 슬리브(326)를 형성한다. 클러치 슬리브(326)는 베이스(312)의 직경보다 약간 작은 직경을 갖는다. 클러치 슬리브(326)는 둘레에 대해 서로 균일하게 이격된 4개의 슬롯(328)을 갖도록 형성된다. 슬롯(328)은 클러치 슬리브(326)의 외주 주위에서 대각선 아래로 연장된다. 4개의 홀(330)은 클러치 슬리브(326)의 원주 주위에서 서로 균일하게 이격되어 있다. 홀(330)은 슬롯(328)의 근위 단부에 가깝게 위치되는 클러치 슬리브의 공통 원주 섹션에 위치한다. 홀(330)은 휴대형 외과기구(200)의 제조 및 분해를 용이하게 하기 위해 제공된다.
클러치 슬리브(326)에는 슬리브의 외면 주위에서 원주 방향으로 연장되도록 그루브(332)가 형성되어 있다. 그루브(332)는 클러치 슬리브(326)의 전방 원위 단부의 근위 후방에 위치된다. 그루브(332)의 원위에 위치하고 클러치 슬리브의 원위 단부로 연장되는 클러치 슬리브(326)의 외부 표면에는 나사산(334)이 제공된다(도 15에 도시됨 ).
클러치 슬리브(326)의 원위 전방으로 돌출하는 회전 하우징(310)은 커플링 넥(336)을 갖는다. 커플링 넥(336)은 클러치 슬리브(326)보다 작은 직경을 갖는다. 커플링 넥(336)은 서로로부터 균일하게 이격된 4개의 슬롯(338)을 규정하도록 형성된다. 슬롯(338)은 커플링 넥(336)을 따라 종방향으로 연장되고 일반적으로 커플링 넥(338)의 가장 원위 부분에 위치된다.
헤드(340)는 회전 하우징(310)의 가장 원위 섹션을 형성한다. 헤드(340)는 커플링 넥(336)의 직경보다 전방으로 연장되고 그보다 작은 직경을 갖는다. 헤드(340)는 내측을 향한 원주 립(342)으로 형성된다. 립(342)은 회전식 하우징의 개방된 원위 단부를 규정한다(원위 단부 개구는 식별되지 않음).
회전식 하우징(310)은 보어(316)로부터 축 방향으로 그리고 원위로 전방으로 연장되어 하우징의 원위 단부로 연장되는 보어(346)가 존재하도록 추가로 형성된다. 보어(346)는 직경이 다른 섹션을 갖는다. 상이한 보어 섹션(미도시)의 직경은 일반적으로 클러치 슬리브(326) 및 커플링 넥(336)의 외부 직경과 동일한 방식으로 서로에 대해 크기가 정해지고, 헤드(340)는 서로 대응한다. 회전 하우징(310)은 보어(346)의 섹션들 중 하나를 규정하는 하우징 내벽으로부터 내향으로 연장되는 그루브(348)를 갖도록 형성된다. 구체적으로, 그루브(348)는 하우징 클러치 슬리브(326)에 형성되어서 외주 그루브(332)가 형성된 슬리브(326)의 원형 슬라이스에 바로 원위에 있다.
도 6b 및 26에서 가장 잘 보이는 베어링 조립체(352, 353)는 스핀들 및 외부 커플러 서브 조립체를 회전 하우징(310)에 회전 가능하게 홀드한다. 베어링 조립체(352)의 외부 레이스(미도시)는 하우징 클러치 슬리브(326)의 내벽에 의해 규정된 보어(346)에 안착한다. 베어링 레이스의 근위 단부는 클러치 슬리브(326)와 커플링 넥(336) 사이의 회전 하우징의 계단형 내부 환형 표면에 대향한다. 베어링 조립체(352)의 외부 레이스의 근위 방향면은 보어(346)에 배치된 유지 링(354)에 인접한다. 유지 링(354)은 회전식 하우징 그루브(348)에 스냅 결합된다.
베어링 조립체의 내부 레이스(미도시)는 스핀들 칼라(286)에 압입된다. 휴대형 외과기구(200)가 조립될 때, 베어링 조립체의 내부 레이스의 근위 단부는 일정한 클러치 출력 영역(304)의 원위 방향면의 환형 부분에 대해 배치된다. 위에서 논의된 바와 같이, 베어링 조립체(352)의 외부 레이스는 회전 하우징(310)의 인접한 내부 벽에 의해 원위 운동으로부터 차단된다. 따라서, 연장에 의한 베어링 조립체(352)의 내부 레이스에 대한 클러치 출력 영역(304)의 접촉 베어링은 스핀들 및 외부 커플러 서브 조립체의 원위 이동을 차단한다.
베어링 조립체(353)는 스핀들 스템(292)의 원위 전방 단부와 회전식 하우징 헤드(340)의 인접한 내벽 사이에서 연장된다. 베어링 조립체(미도시)의 외부 레이스는 하우징 헤드(340) 내에서 회전식 하우징(310)의 내벽에 대해 안착된다. 베어링 조립체 외부 레이스는 또한 회전 하우징 립(342)의 근위 지향 표면에 인접한다. 베어링 조립체(353)의 내부 레이스의 원위 방향면은 유지 링(355)에 대해 안착된다. 유지 링(355)은 스핀들 스템(292)의 그루브(298)에 스냅 결합된다 따라서, 회전식 하우징 립(342) 및 유지 링(355)은 집합적으로 베어링 조립체(353)의 전방 이동을 차단한다.
워셔(356, 357) 및 유지 링(358)은 베어링 조립체(353)의 근위 운동을 방지하기 위해 협력한다. 2개의 워셔(356)가 제공된다. 2개의 워셔(356)의 더 멀리 베어링 조립체(353)의 근위-방향면에 대향하여 배치된다. 가요성 웨이브 워셔인 워셔(357)는 원위와 근위 워셔(356) 사이에 끼워진다. 유지 링(358)은 스핀들 그루브(296)에 안착된다. 유지 링(358)은 주변 스핀들 슬리브(292)의 외부 표면 위로 연장된다. 휴대형 외과기구(200)가 조립될 때, 유지 링(358)의 노출된 부분은 워셔(356 및 357)의 근위 운동을 차단하고, 따라서 베어링 조립체의 유사한 운동을 차단한다. 제조 변동이 있는 경우, 원위 워셔(356)가 베어링 조립체(353)에 대해 배치되도록 하기 위해 웨이브 워셔(357)가 제공된다.
워셔(356)는 L-형이다. 워셔(미도시)의 짧은 수직 섹션은 스핀들 스템(292)의 외부 표면 주위에 배치된다. 베어링 조립체(353)에 가장 가까운 워셔(356)는 그 수직 섹션이 베어링 조립체의 내부 레이스에 대향하도록 위치된다. 이 배열은 베어링 조립체(353)의 내부 레이스로부터 벗어나도록 워셔(356)를 유지한다. 유지 링(358)에 인접한 워셔(356)는 그 수직 섹션이 유지 링과 맞닿도록 위치된다.
스핀들 및 클러치 출력 영역 서브 조립체가 그렇게 위치될 때, 트랜스미션 출력 영역 구동 헤드(266, 272)는 모두 클러치 출력 영역 근위 단부 보어(306)에 안착된다. 슬롯(314)은 클러치 출력 영역(304)에 형성되어서 구동 헤드(266, 272)를 통해 연장한다. 또한, 이 실시예의 구성 요소는 스핀들(222)이 회전식 하우징(310)에 안착될 때 스핀들의 가장 원위 단부가 회전자리 하우징의 주변 원위 단부로부터 약간의 거리로 돌출하도록 치수가 정해진다.
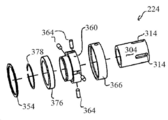
이제 도 6a 및 21을 참조하면, 클러치(224)는 클러치 출력 영역(304) 위의 회전식 하우징 클러치 슬리브(326) 내부에 배치된 원형 내부 시프터(360)를 포함한다. 도 20 및 21에 가장 잘 도시된 바와 같이, 내부 시프터는 베이스(361)를 갖는다. 베이스(361)로부터 원위로 연장되는 내부 시프터(360)는 헤드(362)를 갖도록 형성된다. 헤드(362)는 베이스(361)보다 작은 외경을 갖는다. 일정한 직경의 보어(363)는 베이스(361)의 근위 단부로부터 내부 시프터(360)를 통해 헤드(362)의 원위 단부로 축 방향으로 연장된다.
내부 시프터(360)는 클러치 출력 영역(304)이 보어(363)에 안착될 때 시프터가 외부 커플러의 길이를 따라 종방향으로 이동할 수 있도록 형성된다. 클러치(224)는 원주 주위에서 서로 균일하게 이격되고 내부 시프터 베이스(361)로부터 방사상 내측으로 연장되는 4개의 토크 핀(364)을 포함한다. 각각의 토크 핀(364)은 내부 시프터 베이스(361)에 형성된 측방향 연장 개구(365)에 안착된다. 토크 핀(364)은 충분한 길이를 가지므로 핀의 단부 팁은 각각 트랜스미션 구동 헤드(266, 272)의 노치(268 및 274)에 안착될 수 있다.
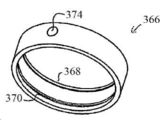
도 20 및 도 21을 참조하면, 내부 시프터(360) 위에 배치된 시프터 하우징(366)은 내부 시프터(360)를 클러치 출력 영역(304) 위로 종방향으로 이동시킨다. 시프터 하우징(366)은 일반적으로 일정한 외경, 링-형 구조의 형태이다. 시프터 하우징(366)은 근위 단부에서 내향 연장 립(368)을 갖도록 더 형성된다. 그루브(370)는 하우징을 통해 중심 개구(372)를 규정하는 시프터 하우징(366)의 환형 내벽으로부터 내향으로 연장한다. 그루브(370)는 시프터 하우징(366)의 원위 단부면에 근위에 위치된다. 시프터 하우징(366)은 외면에 2개의 정반대로 대향하는 구형 인덴테이션(indentation)(374)을 규정하도록 추가로 형성된다.
시프터 하우징(366)은 회전식 하우징 클러치 슬리브(326)에 배치된다. 내부 시프터 헤드(362)는 시프터 하우징(366) 내부에 위치된다. 베어링 조립체(376)는 내부 시프터 헤드(362)의 외주 벽과 시프터 하우징(366)의 인접한 내벽 사이에 배치된다. 베어링 조립체(376)의 근위 단부는 헤드(362)를 넘어 방사상으로 돌출하는 내부 시프터베이스(361)의 인접한 원위 지향 환형 표면에 인접한다. 베어링 조립체(376)의 원위 지향면의 외부 둘레는 시프터 하우징(366)의 유지 링(378)에 접한다. 구체적으로, 유지 링(378)은 시프터 하우징 그루브(370)에 스냅 끼워 맞춤된다. 따라서, 내부 시프터 베이스(361) 및 유지 링(378)에 의해 베어링 조립체(376)의 대향하는 단부들의 캡쳐가 길이방향 이동을 위하여 내부 시프터(360) 및 시프터 하우징(366)이 함께 잠근다. 베어링 조립체(376)는 내부 시프터(360)와 시프터 하우징(366)이 서로에 대해 축방향으로 회전하게 한다.
도 22 및 도 23을 참조하면, 회전식 하우징 클러치 슬리브(326) 위에 회전 가능하게 장착된 시프트 링(382)은 수동으로 작동되어 시프터 하우징(366)의 길이 방향 위치 및 연장에 의해 내부 시프터(360)를 설정한다. 시프트 링(382)은 일반적으로 관형 부재의 형태와 시프트 링(382)의 외부 표면에 형성된 인덴테이션(384)은 링의 핑거 파지를 용이하게 한다. 시프트 링(382)은 또한 축방향으로 연장하는 스루 보어(386)를 규정하도록 형성된다. 보어(386)는 시프트 링(382)이 하부 회전 하우징 클러치 슬리브(326) 위에서 회전할 수 있도록 치수 설정된다. 근위 단부에서, 시프터 링은 보어(386)내에 근위 단부 개구를 형성하는 제 1 카운터 보어(388)를 형성한다. 제 2 카운터 보어(390)는 제 1 카운터 보어(388)와 보어(386) 사이에 위치된다. 제 2 카운터 보어(390)는 보어(386)와 카운터 보어(388) 사이의 직경을 갖는다.
원위 단부에서, 시프트 링(382)은 제 3 카운터 보어(392)를 갖도록 형성된다. 제 3 카운터 보어(392)는 보어(386)내에 원위 단부 개구를 형성한다. 제 2 및 제 3 카운터 보어(390, 392)는 각각 동일한 직경이다. 보어(386)를 규정하는 시프트 링(382)의 내벽은 또한 종방향으로 연장되고 직경이 반대인 오목한 그루브(394)를 규정하도록 형성된다. 각각의 그루브(394)는 제 2 카운터 보어(390)로부터 제 3 카운터 보어(392)까지 연장된다.
휴대형 외과기구(200)가 조립될 때, 볼 베어링(396)은 시프트 링(382)의 회전 운동을 시프터 하우징(366)을 변위시키는 축 운동으로 전달한다. 각각의 볼 베어링(396)은 회전식 하우징 클러치 슬리브 슬롯(328) 중 하나에 대향하여 안착된다. 2개의 볼 베어링(396)이 제공되고 4개의 슬롯(328)이 존재한다. 추가 슬롯(328)은 휴대형 외과기구(200)의 조립 동안 구성 요소 배향을 보조한다. 회전 슬리브(310) 내부에서, 각각의 볼 베어링(396)은 시프터 하우징(366)에 형성된 인덴테이션(374) 중 별도의 하나에 안착된다. 회전식 하우징(310)에서, 각각의 볼 베어링(396)은 클러치 입력 영역(382)에 형성된 그루브(394) 중 별도의 하나에 안착된다.
휴대형 외과기구(200)가 조립될 때, 회전식 하우징 플랜지(322)는 클러치 입력 영역 제 1 카운터 보어(388)에 안착된다. O-링(398)은 회전식 하우징(310)의 외주면과 클러치 입력 영역(382)의 내벽 사이에서 연장된다. O-링(398)은 클러치 입력 영역 제 2 카운터 보어(390)의 환형 공간에 안착된다. 제 2 O-링(398)은 클러치 입력 영역 제 3 카운터 보어(392)에 안착된다. 두 O-링(398)은 회전식 하우징의 클러치 슬리브(326)의 매끄러운 외부 표면 위로 연장된다.
도 24 및 25를 참조하면, 시프트 링 너트(400)는 시프트 링(382)을 휴대형 외과기구(200)의 나머지 부분에 홀드한다. 시프트 링 너트(400)는 일반적으로 관형이다. 시프트 링(400)은 대체로 일정한 외경을 갖는 베이스(402)를 갖도록 형성된다. 베이스(402)의 전방에, 시프트 링 너트(400)는 헤드(404)를 갖는다. 말단으로 연장되고, 시프트 링 헤드(404)의 외경은 내측으로 테이퍼진다. 시프트 링 너트(400)는 베이스(402)의 외부 표면의 근위 단부에 2개의 대향 플랫(406)을 규정하도록 추가로 형성된다. 플랫(406)은 조립 동안 시프트 너트(400)를 회전 하우징(310)에 나사 고정하기 위해 사용되는 체결 공구를 수용한다.
보어(408)는 근위 단부로부터 원위 단부로 시프트 링 너트(400)를 통해 축 방향으로 연장된다. 시프트 링 너트(400)는 보어(408)를 규정하는 내부 원형 벽으로부터 내향으로 연장되는 내향으로 계단형 환형 립(410)을 갖도록 더 형성된다. 립(410)의 내부 원형면은 나사산(411)으로 형성된다(도 24에 도시됨). 시프트 링 너트(400)는 회전 하우징 클러치 슬리브(326)상의 나사산(334)과 시프트 링 너트 나사산(411)을 체결함으로써 회전식 하우징에 나사로 고정된다.
그 후, 클러치(224)는 스핀들이 선택된 구동 헤드와 함께 회전하도록 스핀들(222)을 기어 트레인 구동 헤드(266, 272) 중 하나에 결합시키도록 설정된다. 구체적으로, 클러치(224)는 스핀들이 연결될 트랜스미션 출력 영역의 구동 헤드(266, 272)의 노치(268, 274)에서 클러치 입력 영역의 토크 핀(364)이 안착하도록 설정된다. 토크 핀(364)의 설정, 예를 들어 토크 핀(364)의 종방향 포지셔닝은 클러치 시프트 링(382)을 회전시킴으로써 수행된다. 시프트 링(382)의 회전은 회전 하우징 슬롯(328)에서 볼 베어링(396)의 나선형 운동을 초래한다. 볼 베어링(396)의 종방향 변위는 시프터 하우징(366)의 동일한 종방향 변위를 초래한다. 시프터 하우징(366)의 종방향 이동은 내부 시프터(360)의 유사한 이동을 발생시킨다.
토크 핀(364)은 내부 시프터(360)와 일체형이므로, 내부 시프터의 종방향 변위는 근위에 위치한 구동 헤드(266)의 노치(268) 또는 원위에 위치한 구동 헤드(272)의 노치(274)에 핀의 선택적 안착을 초래한다.
휴대형 외과기구(200)는 이제 작동 준비가 되었다. 트리거 스위치(212)의 누름은 모터(204)의 작동을 초래한다. 모터 출력 영역(206)이 회전한다. 트랜스미션(216)은 샤프트에 의해 출력되는 회전 모멘트를 2개의 상이한 속도로 감소시킨다. 구체적으로, 기어 트레인 내부의 기어는 구동 헤드(266)가 제 1 감속 속도로 회전하게 한다. 구동 헤드(272)는 제 1 감속 속도보다 작은 제 2 감속 속도로 회전하게 된다.
클러치(224)의 설정에 따라, 토크 핀(364)은 각각 구동 헤드(266, 272) 중 하나의 노치(268, 274)에 안착된다. 따라서, 토크 핀(364)은 핀이 결합되는 구동 헤드(266, 272)의 속도로 회전한다. 토크 핀(364)은 클러치 출력 영역 슬롯(314)을 통해 연장된다. 결과적으로, 토크 핀의 회전은 클러치 출력 영역(304)과 스핀들(222)을 통한 출력 부재의 움직임을 유사하게 한다. 커플링 헤드 보스(482)는 스핀들 보어(284)에 비교적 밀착되어 있으며, 이들 구성 요소는 비원형 단면 프로파일을 가지며, 스핀들(222)의 회전 운동은 보스(482)에 의해 커플링 헤드(234) 및 나머지 외과용 엔드 이펙터(228)로 전달된다.
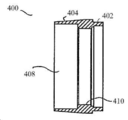
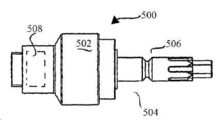
도 28a 및 29를 참조하면, 커플러는 속도 변경 외과용 부착물(500)의 형태로 구현될 수 있다. 속도 변경 외과용 부착물(500)은 출력 부재가 작동 가능하게 체결되어서, 출력 구동 샤프트(574)의 형태로 구현되는 출력 부재의 구동이 시술 기능을 수행하도록 외과용 엔드 이펙터(228)를 작동시켜서 속도 변경 외과용 부착물(500)의 구동을 유발한다. 속도 변경 외과용 부착물(500)은 모터에 관련된 외과용 엔드 이펙터의 속도를 변경시킨다.
도 28b를 참조하면, 속도 변경 외과용 부착물(500)은 하우징(502)을 포함한다. 중간 샤프트(504)는 하우징(502)으로부터 후방으로 연장된다. 중간 샤프트(504)는 외과용 엔드 이펙터 장착 헤드(234)와 동일한 특징을 갖는 근위 단부 장착 헤드(506)를 갖도록 형성된다. 하우징 내부에는 팬텀 사각형으로 표시되는 장착 조립체(508)가 있다. 마운트(508)는 회전을 위해 외과용 엔드 이펙터(미도시)의 근위 단부를 해제 가능하게 유지하도록 설계된다. 마운트(508)의 정확한 구조는 이 실시예와 관련이 없다. 마운트(508)는 장착 조립체(226)의 특징을 포함할 수 있다. 대안적으로, 마운트(508)에는 회전을 위해 설명된 장착 헤드(234) 이외의 장착 헤드를 홀드하는 특징이 제공될 수 있다. 여기에는 외과용 기술 분야에서 알려진 트링클 피팅, Hudson® 피팅 및 수정된 트링클 피팅이 있는 장착 헤드가 포함된다.
중간 샤프트(504)는 마운트(508)를 회전시킨다. 이 예시적인 실시예에서, 중간 샤프트(504)와 마운트(508)의 스핀들은 동일한 구성 요소이고, 따라서 부착물(500)은 휴대용 외과기구에, 장착 헤드(234)와 상이한 헤드를 갖는 외과용 엔드 이펙터를 연결하기 위한 수단으로서 역할을 한다. 이 예시적인 실시예에서, 속도 변경 외과용 부착물은 휴대형 외과기구 스핀들(222)이 회전하는 속도로 회전한다. 도 28a에 도시된 실시예와 같은 다른 실시예들에서, 입력 샤프트(506)에 의해 수용된 회전 모멘트를 장착 헤드로 전달하기 위해 부착물 하우징(502) 내부에 증속기 또는 감속기 기어 조립체가 있다. 본 출원인의 양수인의 미국 특허 제 5,993,454 호(1999년 11월 30일 발행되고 본 명세서에 그 전체가 참고로 포함된 외과용 드릴 용 드릴 부착물)은 그러한 조립체 중 하나를 보여준다. 이러한 유형의 속도 변경 외과용 부착물에는 휴대형 외과기구의 예시적인 실시예의 스핀들(222) 및 마운트(226)와 실질적으로 동일한 마운트 및 스핀들이 제공될 수 있다.
이 속도 변경 외과용 부착물의 기어 트레인 및 구동 헤드는 상이한 설계일 수 있다. 예를 들어, 일부 실시예들에서, 기어 트레인은 3개 이상의 구동 헤드를 가질 수 있고, 이들 각각은 단일 입력 회전 모멘트에 응하여 상이한 회전 속도로 작동한다. 일부 실시예에서, 기어 트레인은 하나 이상의 구동 헤드가 모터 출력 영역(206)이 회전하는 것보다 더 빠른 속도로 회전하게 하는 기어를 갖는다.
모터(204)가 모터 출력 영역(206)을 회전시키는 수단은 마찬가지로 설명된 것과 다를 수 있다.
유사하게, 클러치(224)의 구조는 설명된 것과 상이할 수 있다. 예를 들어, 일부 실시예는 기어 트레인 구동 헤드(266, 272) 및 스핀들(222)을 동시에 체결시키기 위해 몇몇 또는 다수의 측방향으로 연장되는 부재, 클러치 핀 또는 다른 토크 전달 구성 요소를 가질 수 있다. 일부 실시예에서, 클러치(224)는 이러한 부재들 중 단일 부재들을 포함할 수도 있다.
일부 실시예에서, 내부 시프터 및/또는 외부 시프터는, 종방향 모션이 이러한 하위 구조체로 전달되는 지점이, 구동 헤드들 중 하나로부터 스핀들까지 토크를 전달하는 측방향 부재가 위치되는 종방향 슬라이스 내에 있도록 배열될 수 있다. 이러한 구조는 클러치의 전체 길이 방향 길이를 추가로 감소시킬 수 있다.
또한, 일부 실시예에서, 클러치 핀은 스핀들에 일체로 부착될 수 있다. 본 발명의 이들 실시예에서, 클러치 핀이 적절한 기어 트레인 구동 헤드와 체결되도록, 변위된다.
유사하게, 다른 실시예에서, 회전 시프트 링 이외의 수단이 클러치 핀의 위치를 설정하는데 사용될 수 있다. 일부 실시예에서, 종방향으로 이동하기 위해 휴대형 외과기구 하우징에 이동 가능하게 장착된 스위치 부재는 클러치 핀의 위치를 설정하기 위해 변위되는 외과의에 의해 작동되는 구성 요소이다.
또한, 장착 조립체(226)의 구조 및 상보적인 속도 변경 외과용 부착물/외과용 엔드 이펙터 장착 헤드는 설명된 것과 상이할 수 있다. 모든 실시예에서, 출력 토크 및 상보적인 장착 헤드 보스(482)를 갖는 스핀들의 표면이 육각형 또는 심지어 다각형 단면 프로파일을 가질 필요는 없다. 다각형 단면 기하학적 형상이 장착 헤드로의 토크 전달을 보장하기 위해 가장 효율적인 것으로 여겨진다.
유사하게, 장착 헤드 바디(484)는 설명되고 도시된 것과 다른 기하학적 형상을 가질 수 있다. 모든 실시예에서 이 구성 요소 및 상보형 스핀들 보어는 원형 단면 프로파일을 가질 필요는 없다. 일부 실시예에서, 이들 구성 요소는 하나 이상의 평면을 가질 수도 있다. 이러한 형상은 장착 헤드 워블을 감소시키기 위한 최적의 형상인 것으로 여겨진다. 유사하게, 본 발명의 모든 실시예에서, 휴대형 외과기구 장착 조립체와 관련된 잠금 부재를 수용하기 위한 장착 헤드 바디에 의해 규정된 인덴테이션이 환형 홈일 필요는 없다. 일부 실시예에서, 상보형 휴대형 외과기구 장착 조립체와 일체로 상보적인 잠금 부재를 수용하기 위해 장착 헤드 바디에 하나 이상의 인덴테이션이 제공된다.
일부 실시예에서, 장착 바디는 상보적인 장착 조립체 잠금 부재를 수용하기 위한 어떠한 기하학적 특징도 갖지 않을 수 있다. 또한, 장착 헤드를 갖는 휴대형 외과 기구 마운트의 체결을 가능하게 하기 위한 기하학적 특징부는 장착 헤드 바디의 표면 너머로 돌출된다.
유사하게, 장착 헤드 바디는 원위에 인접한 속도 변경 외과용 부착물/외과용 엔드 이펙터 샤프트의 직경과 동일한 직경을 갖는 실시예가 있을 수 있다. 또 다른 실시예에서, 외과용 부착물/외과용 엔드 이펙터 샤프트는 장착 헤드의 직경보다 큰 직경을 가질 수 있다.
마찬가지로, 본 실시예의 외과용 부착물/외과용 엔드 이펙터 장착 헤드는 스핀들 보어에서 장착 헤드의 정렬을 용이하게 하기 위해 슬롯(488) 및 경사면(492)과 다른 기하학적 특징으로 구성될 수 있다. 일부 실시예에는 이러한 특징부가 제공되지 않을 수도 있다.
다른 마운트는 속도-변경 외과용 부착물/외과용 엔드 이펙터 장착 헤드를 스핀들에 고정시키는 대신에 장착 헤드가 스핀들에 의해 구동되게 하는 역할만 할 수 있다. 또한, 휴대형 외과기구의 제조업체는 자체적인 속도 감소 기어 조립체를 갖는 휴대형 외과기구에 장착하기 위한 탈착식 속도 변경 외과용 부착물을 종종 제공한다. 속도 변경 외과용 부착물을 외과용 도구에 선택적으로 결합시키는 능력은 외과의가 휴대형 외과기구에 결합된 절삭 공구에 이용 가능한 토크를 더욱 증가시킬 수 있게 한다. 종종, 이러한 속도 변경 외과용 부착물은 미리 설정된 정수 비율로 속도를 줄이고 토크를 증가시키도록 설계되었다. 예를 들어, 모터 구동 샤프트의 속도를 3:1 또는 4:1로 감소시키는 내부 기어 조립체를 갖는 속도 변경 외과용 부착물이 제공되었다. (상기 비율은 입력 샤프트 속도와 출력 샤프트 속도의 관계를 나타내는 것이 이해되어야 한다. 이 비율의 역수는 토크 입력과 토크 출력 사이의 관계를 나타낸다.)
또한, 휴대형 외과기구의 제조업자는 종종 자신의 감속 기어 조립체를 갖는 휴대형 외과기구에 장착하기 위한 착탈식 속도 변경 외과용 부착물을 제공한다. 속도 변경 외과용 부착물을 외과용 도구에 선택적으로 결합시키는 능력은 외과의가 휴대형 외과기구에 결합된 외과용 엔드 이펙터에 이용 가능한 토크를 더욱 증가시킬 수 있게 한다. 종종 이러한 속도 변경 외과용 부착물은 미리 설정된 정수 비율로 속도를 높이고 토크를 높이도록 설계되었다. 예를 들어, 모터 구동 샤프트의 속도를 3:1 또는 4:1로 감소시키는 내부 기어 조립체를 갖는 속도 변경 외과용 부착물이 제공되었다. 상기 비율은 입력 샤프트 속도와 출력 샤프트 속도의 관계를 의미한다는 것을 이해해야 한다. 이 비율의 역수는 토크 입력과 토크 출력 간의 관계를 나타낸다.
도 29를 참조하면, 부착물 기어 조립체(500)의 일 실시예는 휴대형 외과기구에 부착된 외과용 엔드 이펙터의 토크를 증가시키기 위해 휴대형 외과기구와 함께 사용하도록 의도된다. 기어 조립체는 모터 속도의 2:1 감소를 얻기 위해 사용될 수 있으며, 여기서 출력 힘은 입력 힘이 적용되는 축 주위에 그리고 입력 힘의 방향과 동일한 방향으로 중심에 놓인다.
도 28a 및 32를 참조하면, 속도 변경 외과용 부착물(500)은 스핀들(222)의 형태로 구현된 출력 부재에 작동 가능하게 결합된 샤프트 입력 영역(528)을 규정하는 중간 샤프트(524)를 포함하여 스핀들(222)의 구동이 샤프트 입력 영역(528)의 구동을 유발하도록 구성된다. 중간 샤프트(524)는 샤프트 출력 영역(529)을 추가로 규정한다. 기어 트레인(530)은 샤프트 출력 영역(529)에 작동 가능하게 결합된 기어 트레인 영역(531)을 규정하여, 샤프트 출력 영역(529)의 구동이 기어 트레인 영역(531)의 구동을 유발하도록 구성된다. 기어 트레인(530)은 기어 트레인 입력 영역(531) 및 외과용 엔드 이펙터(228)에 작동 가능하게 결합된 기어 트레인 출력 영역(533)을 추가로 규정하여 기어 트레인 입력 영역(531)의 구동은 기어 트레인 출력 영역(533)의 구동 및 외과용 엔드 이펙터(228)의 작동을 발생시키도록 구성된다.
중간 샤프트(524)의 샤프트 출력 영역(529)은 샤프트 기어 트레인 인터페이스(1006)에서 기어 트레인 입력 영역(531)과 접속하고, 샤프트 기어 트레인 인터페이스(1006)는 샤프트 기어 트레인 백래시를 포함하여 샤프트 기어 트레인내에서의 샤프트 출력 영역(529)의 구동은 기어 트레인 입력 영역(531)의 구동을 유발하지 않는다. 이 실시예에서, 기어 트레인 입력 영역(529)은 샤프트 출력 영역에 결합된 유성 기어(548)의 형태로 구현될 수 있고 이는 입력 태양 기어(542)의 형태로 구현될 수 있다(도 30에 도시됨). 기어 트레인 출력 영역(533)은 유성 기어(560) 및 외과용 엔드 이펙터(228)(도 27에 도시됨)에 작동 가능하게 결합된 출력 선 기어(588)를 포함하여 유성 기어(560)의 구동이 출력 선 기어(588)의 구동을 발생시키고 외과용 엔드 이펙터(228)의 작동을 유발하도록 구성된다.
도 28a를 참조하면, 샤프트 출력 영역(529)은 샤프트 기어 트레인 백래시(1006)(도 28a에 도시됨)를 갖는 샤프트 기어 트레인 인터페이스에서 기어 트레인 입력 영역(531)과 접속하여 샤프트 기어 트레인 백래시(1006) 내의 샤프트 출력 영역(529)의 구동은 기어 트레인 입력 영역(531)의 구동을 발생시키지 않는다.
속도 변경 외과용 부착물(500)은 휴대형 외과기구(200)의 전단에 장착되어 휴대형 외과기구의 전방과 일체화된 칼라에 안착된다. 속도 변경 외과용 부착물(500) 내부의 기어 트레인(530)은 샤프트(532)에 의해 발생된 회전력을 속도 변경 외과용 부착물의 전방에 장착된 척(510)으로 전달한다. 척(510)은 외과용 엔드 이펙터(228)를 유지하는데 사용될 수 있다. 도시된 실시예에서, 외과용 엔드 이펙터(228)는 드릴 비트이다.
도 29 내지 32를 참조하면, 속도 변경 외과용 부착물(500)은 부착물의 대부분의 구성 요소를 포함하는 입력 하우징(514)을 포함한다. 입력 하우징(514)은 좁은 직경의 스템 섹션(516)을 갖도록 형성된다. 스템 섹션(516)은 휴대형 외과기구(200)에 삽입되는 하우징(514)의 부분이다. 스템(516)의 외부 표면은 부착물의 이동을 중단하는 반회전 키(키는 미도시), 휴대형 외과기구에 속도 변경 외과용 부착물(500)을 부착하도록 형성된다. 입력 하우징(514)은 스템(516)과 일체로 형성되고 스템(516)으로부터 동축으로 전방으로 연장되는 헤드(520)를 갖도록 형성된다. 도시된 실시예에서, 헤드(520)는 스템(516)의 외부 직경보다 큰 외부 직경을 갖는다. 멀티섹션 보어(522)는 휴대형 외과기구(200)에 결합된 스템(516)의 단부로부터 헤드(520)의 전단까지 입력 하우징(514)을 통해 연장한다.
중간 샤프트(524)는 하우징 스템(516)의 개방 단부로부터 스템에 인접한 헤드(520)의 부분까지 연장되는 하우징 보어(522)의 부분에 회전 가능하게 장착된다. 2개의 이격된 베어링 조립체(528)는 중간 샤프트(524)를 입력 하우징(514)에 회전 가능하게 연결한다.
중간 샤프트(524)에는 중간 샤프트를 통해 축 방향으로 연장되는 보어(526)가 형성되어 있다. 중간 샤프트(524)는 다각형 형상의 외부 표면을 갖도록 형상화된 휴대형 외과기구(200)에 가장 가까운 단부(539)(도 32에 도시됨)를 갖도록 더 형성된다. 속도 변경 외과용 부착물(500)가 휴대형 외과기구(200)에 결합될 때, 구동 샤프트 단부(539)는 스핀들(222)의 헤드(도 6b에 도시됨)에 형성된 상보적인 프로파일 개구 내에 안착된다. 결과적으로, 스핀들(222)의 회전은 중간 샤프트(524)의 유사한 회전을 발생시킨다.
중간 샤프트(524)는 입력 선 기어(542)를 형성하는 기어 톱니가 제공되는 헤드를 갖도록 형성된다. 중간 샤프트(524)는 또한 입력 선 기어(542)의 전방에 위치된 노즈 섹션(544)을 갖는다. 노즈 섹션(544)의 외경 입력 선 기어(542)의 외부 직경보다 작다.
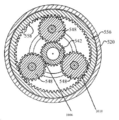
입력 선 기어(542)는 입력 하우징(514)에 회전 가능하게 장착된 3개의 입력 유성 기어(548)와 체결한다. 보다 구체적으로, 중간 샤프트(524)의 종축 주위에 균일하게 이격된 입력 유성 기어(548)는 유성 캐리어(538)에 장착된다. 유성 캐리어(538)는 링 형상이며 중간 샤프트(524) 주위에 위치된다. 유성 캐리어(538)는 스템(516)에 인접한 하우징의 헤드(520) 부분에 위치한 하우징 보어(522)의 계단식 섹션에 압입된다. 본 발명의 도시된 실시예에서, 유성 캐리어(538)의 전방 및 후방 외부 에지는 입력 하우징(514)에 캐리어의 장착을 용이하게 하기 위해 내향 단계(551)로 형성된다. 각각의 입력 유성 기어(548)는 고정 액슬 핀(554)에 회전 가능하게 장착된다. 액슬 핀(554)은 유성 캐리어(538)를 통해 연장되는 보어(555)에 압입된다.
환형 링 기어(556)는 입력 유성 기어(548)를 둘러싼다. 링 기어(556)는 입력 유성 기어(548)와 체결되는 톱니(558)를 갖는 내부 표면을 갖는다. 링 기어(556)의 외벽은 매끄럽다. 링 기어(556)는 그 외경이 링 기어가 안착되는 하우징 보어(522)의 섹션을 규정하는 입력 하우징(514)의 인접한 내벽의 직경보다 작도록 설계된다. 따라서, 링 기어(556)의 외벽과 입력 하우징(514)의 인접한 내벽 사이에 작은 간극 공간이 존재한다. 일부 실시예에서, 입력 하우징(514)의 내벽과 링 기어(512)의 외벽 사이의 간극은 대략 0.007 내지 0.011 인치(0.18 내지 0.28mm)이다. 따라서, 링 기어(556)는 입력 하우징(514)에 대해 "플로트(float)"된다.
이 실시예의 기어 조립체는 링 기어(556)와도 체결되는 제 2 세트의 유성 기어 또는 출력 유성 기어(560)를 포함한다. 출력 유성 기어(560)는 입력 하우징 헤드(520)의 개방 단부로부터 전방으로 연장하고 장착되는 출력 하우징(562)에 끼워맞춤된다. 출력 하우징(562)은 축방향으로 연장되는 보어(564)를 갖는 대체로 링형 구조이다. 출력 하우징 보어(564)는 입력 하우징 보어(522)와 동축으로 연장된다. 출력 하우징(562)의 후단은 입력 하우징 보어(522)의 전단에 안착된다. 출력 하우징(562)의 중간 섹션의 외부 표면에는 나사산(566)이 제공된다. 나사산(566)은 입력 하우징(514)의 내벽 주위에 제공된 나사산(568)과 체결한다. 출력 하우징(562)은 나사산(566)이 형성된 표면의 전방에 위치된 외향 연장 환형 립(563)을 갖도록 형성된다. 립(563)은 입력 하우징(514)의 개방 전방 단부 위로 연장되어 출력 하우징(562)이 입력 하우징 보어(522)에 안착되는 정도를 제한한다.
출력 유성 기어(560)는 출력 하우징(562)의 후방으로 향하는 면에 안착된다. 출력 유성 기어(560)는 고정된 액슬 핀(571) 위에 회전 가능하게 장착된다. 액슬 핀(571)은 하우징(562)의 후방으로 향한 면으로부터 출력 하우징(562) 내로 연장되는 보어(미도시)에 압입 끼워 맞춤된다. 링 기어(556) 내에서, 2개의 링형 워셔(572)는 입력 및 출력 유성 기어(548 및 560) 사이에 각각 위치되는 것이 더 주목될 것이다. 출력 유성 기어(560)가 출력 하우징(562)으로부터 분리되는 것을 방지하기 위해 워셔(572)가 제공된다.
출력 구동 샤프트(574)는 출력 하우징 보어(64)에 위치된다. 출력 구동 샤프트(574)는 출력 하우징(562)의 전단으로부터 연장되는 세장된 스템 섹션(576)을 갖는다. 스템 섹션(576)과 보어(564)를 규정하는 출력 하우징(562)의 내벽 사이에서 연장하는 2개의 베어링 조립체(578)는 출력 하우징(562)에서 출력 구동 샤프트(574)에 회전가능하게 장착된다. 두 베어링 조립체(578)의 후방의 후면은 출력 하우징(562) 내부에 내향하는 단계(580)에 접한다. 유지 링(582)은 베어링이 출력 하우징 보어(562)의 전단으로부터 나오는 것을 방지한다. 유지 링(582)의 외부 둘레는 보어(64)를 규정하는 출력 하우징(562)의 내벽에 형성된 환형 그루브(586)에 안착된다. 2개의 워셔(587)는 최전방 베어링 조립체(578)의 전면과 척(510)의 인접한 표면 사이에 위치된다.
출력 구동 샤프트(574)는 출력 선 기어(588)로서 기능하는 톱니형 헤드를 갖는다. 출력 선 기어(588)는 일체로 형성된 스템(576)의 직경보다 큰 직경을 갖도록 형성된다. 큰 직경으로 인해, 출력 선 기어(588)는 입력 유성 기어가 유성 캐리어(538)로부터 나오는 것을 방지하기 위해 입력 유성 기어(548)의 외향 이동을 차단한다.
도시된 실시예에서, 출력 구동 샤프트(574)는 샤프트를 통해 축 방향으로 연장되는 보어(592)를 갖는다는 것이 주목될 것이다. 도 29로부터 중간 샤프트(524)의 노즈 섹션(544)이 출력 구동 샤프트(574)의 보어(592)의 인접한 개방 단부로 연장됨을 알 수 있다. 가요성 쿼드 링(594)은 출력 구동 샤프트(574) 내부에 보어(592)와 연속적으로 형성된 환형 그루브(596)에 안착된다. 쿼드 링(594)은 보어(592) 내로 연장되는 노즈 섹션(544)의 부분 위에 장착된다. 쿼드 링(594)은 기어 조립체 내부에 배치된 윤활 물질이 중간 샤프트(506, 524) 또는 출력 구동 샤프트(574)의 내벽을 따라 속도 변경 외과용 부착물(500) 외부로 유동하는 것을 방지하는 장벽을 제공한다.
출력 구동 샤프트(574)는 척(510)과 체결한다. 척의 실시예의 내부에는 외과용 엔드 이펙터(228)를 제자리에 홀드하는 조(jaw)가 있다.(척(510) 내부의 조 및 다른 구성 요소는 도시되어 있지 않다.) 속도-변경 외과용 부착물(500)과 일체형인 척(510)의 한 유형은 "제이콥스(Jacobs)" 척이다. 조는 외과용 엔드 이펙터(228)의 유사한 움직임을 발생시키기 위해 출력 구동 샤프트(574)와 함께 회전한다.
기어 트레인(530)은 복수의 내부 기어 트레인 인터페이스에서 서로 맞물린 복수의 기어를 포함하고, 내부 기어 트레인 인터페이스 중 적어도 하나는 내부 기어 트래인 백래시를 포함하여, 내부 기어 트레인 백래시 내의 내부 기어 트레인 입력 영역의 구동이 외과용 엔드 이펙터가 시술 기능을 수행하도록 발생시키지 않는다.
기어 트레인(530)은 (도 30 및 31에 도시된 바와 같이) 복수의 내부 기어 인터페이스(1006, 1010, 1012)에서 서로 맞물리는 복수의 기어(542, 548, 556, 560 및 588)를 포함하고, 내부 기어 트레인 인터페이스 중 적어도 하나는 내부 기어 트레인 백래시를 포함하여, 내부 기어 트레인 백래시 내에서 기어 트레인 입력 영역의 구동이 외과용 엔드 이펙터가 시술 기능을 수행하도록 유발하지 않는다.
도 28a를 참조하면, 휴대형 외과기구(200)가 작동될 때 스핀들(222)을 포함하는 출력 부재의 회전으로 인해 중간 샤프트(524)가 회전한다. 중간 샤프트(524)와 그에 통합된 입력 선 기어(542)의 이동은 입력 유성 기어(548)가 그 축을 중심으로 회전하게 한다. 입력 유성 기어(548)의 회전은 고정되지 않은 링 기어(556)를 회전시킨다. 링 기어(556)의 작동은 출력 유성 기어(560)가 그들의 축을 중심으로 회전하게 한다. 출력 유성 기어(560)의 이동은 출력 선 기어(588) 및 출력 구동 샤프트(574)의 회전을 강제한다. 출력 구동 샤프트의 회전은 척(510)에 의해 결합된 외과용 엔드 이펙터(228)의 유사한 이동을 발생시킨다.
전술한 설명은 특정 실시예에 관한 것이며 다른 실시예는 설명된 것과 상이할 수 있음을 인식해야 한다. 예를 들어, 속도 변경 외과용 부착물은 입력 및 출력 회전 속도 사이에 2:1 감소를 발생시키는 치수의 입력 및 출력 구동축을 포함할 필요가 없다. 다른 실시예에서, 구동 샤프트(524, 574)는 출력 구동 샤프트가 중간 샤프트보다 더 빠르게 회전하도록 치수가 정해질 수 있다. 더욱이, 속도 변경 외과용 부착물이 조립되는 구성 요소는 설명된 것과 상이할 수 있다. 예를 들어, 일부 실시예에서 입력 유성 기어는 유성 기어가 포함된 하우징에 직접 장착될 수 있다. 또 다른 실시예는 단일 하우징을 가질 수 있다.
또한, 입력 및 출력 유성 기어(548, 560)가 각각 회전하는 축이 속도 변경 외과용 부착물(500)의 중심으로부터 바깥쪽으로 연장되는 공통 방사선을 따라 놓일 필요는 없다. 정렬은 도 29에 도시되어 있지만, 모든 실시예에서 요구되는 것은 아니다. 또한, 입력 유성 기어 수와 출력 유성 기어 수는 항상 1:1 비율일 필요는 없다.
또한, 상보적인 외과용 엔드 이펙터를 홀드하기 위한 휴대형 외과기구와 관련하여 하나의 특정 유형의 마운트만이 도시되었다. 다른 마운트가 이 속도 변경 외과용 부착물과 함께 사용될 수 있는 것으로 고려된다.
마찬가지로, 속도 변경 외과용 부착물(500)의 일부 실시예는 휴대형 외과기구(200)에 영구적으로 장착될 수 있음을 인식해야 한다. 또한, 외과용 엔드 이펙터라는 용어는 버 및 와이어 드라이버와 같은 다른 형태의 외과용 도구를 포함하는 것으로 이해되어야 한다.
도 5b, 28a, 30 및 31은 커플러가 속도 변경 외과용 부착물로 구현될 때 백래시를 가질 수 있는 상이한 인터페이스를 도시한다. 모터 출력 영역(251)과 트랜스미션 입력 영역(242) 사이의 인터페이스(1000)(도 5b에 도시됨)는 백래시를 가질 수 있다. 트랜스미션의 내부 기어들 사이의 인터페이스(1002)(도 28a에 도시됨)는 백래시를 가질 수 있다. 기어 세트들(252, 254) 사이의 인터페이스는 백래시를 가질 수 있다. 기어 세트(256, 262) 사이의 인터페이스는 백래시를 가질 수 있다.
도 28a, 30 및 31은 휴대형 외과기구(200)에 부착된 속도 변경 외과용 부착물(500) 내의 인터페이스(1006, 1010, 1012)에서의 백래시의 예시적인 실시예를 도시한다. 휴대형 외과기구의 구동 구성 요소들 사이의 모든 인터페이스에 대한 누적 백래시 내의 모터의 이동은 시술 기능을 수행하고 외과용 엔드 이펙터를 구동하지 않는 동안 피드백 기능을 제공할 수 있다.
도 30은 백래시를 갖는 유성 기어(548)와 선 기어(542) 사이의 인터페이스(1006)의 도면이다(3개의 지점 중 하나만 참조). 도 30은 또한 백래시를 갖는 링 기어(556)와 유성 기어(548) 사이의 인터페이스(1010)를 도시한다(3개의 지점 중 하나만 참조). 도 31은 백래시를 갖는 출력 유성 기어(560)와 링 기어(556) 사이의 인터페이스(1010)를 도시한다(3개의 지점 중 하나만 참조). 출력 유성 기어(560)와 출력 선 기어(588) 사이의 인터페이스(1012)(참조된 3개의 점 중 하나만)는 백래시를 갖는다. 전술한 설명은 특정 실시예에 관한 것이며 다른 실시예는 설명된 것과 상이할 수 있음을 인식해야 한다. 피드백 신호(FS)에 대한 제 1 방향과 제 2 방향 사이에서 구동 시스템(18)을 진동시키는 것은 특정 실시예가 될 외과용 엔드 이펙터(228) 이전의 마지막 가능한 인터페이스를 통해 모터-트랜스미션 인터페이스(1000)로부터 시작하는 누적 백래시보다 작을 것임이 고려된다.
도 35를 참조하면, 도 1 내지 4c의 휴대형 외과기구(10)의 사용자에게 피드백을 제공하기 위한 방법(100)이 도시되어 있다. 방법(100)은 그립 이벤트를 감지하는 단계와 함께 단계(102)에서 시작한다. 특히, 자이로스코프(36)는 휴대형 외과기구(10)의 각속도를 감지할 수 있고, 전류 센서(38)는 입력 장치(22)가 배터리(50)로부터 구동 시스템(18)으로 전류를 공급하도록 작동되는 것을 감지할 수 있다. 그러나, 휴대형 외과기구는 그립 이벤트와 관련된 임의의 상태를 감지하기 위한 임의의 적합한 유형의 1개, 3개, 4개 또는 그 이상의 센서를 포함할 수 있다.
단계 104에서, 그립 이벤트가 감지될 때 휴대형 외과기구(10)의 시술 기능(OF)이 종료될 수 있다. 특히, 컨트롤러(20)는 자이로스코프(36) 및 전류 센서(38)로부터 제 1 및 제 2 그립 이벤트 신호(ES1, ES2)를 수신할 수 있다. 컨트롤러(20)는 컨트롤러(20)가 제 1 그립 이벤트 신호(ES1)가 휴대형 외과기구가 미리 결정된 임계 각속도, 예를 들어 초당 500도만큼 회전되는 것을 나타내고, 전류 센서(38)에 의해 생성된 제 2 신호(ES2)가 전류가 구동 시스템(18)에 공급되고 있음을 나타내는 것으로 판단할 때 그립 이벤트가 발생한 것으로 결정할 수 있다. 다른 예시에서, 컨트롤러(20)는 그립 이벤트와 관련된 하나 이상의 스레스홀드가 충족되었음을 나타내는 임의의 적합한 센서로부터 다른 신호를 수신하는 것에 답하여 그립 이벤트가 발생했다고 결정할 수 있다.
컨트롤러가 그립 이벤트가 발생한 것으로 결정하면, 컨트롤러(20)는 출력 부재(16)를 정지시킴으로써 외과용 엔드 이펙터(12)의 시술 기능을 종료할 수 있다. 예를 들어, 컨트롤러(20)는 외과용 단부 이펙터(12)의 회전을 방해하거나 다른 컷팅 모션인 바인딩, 핀칭 또는 오정렬을 중단하도록 구동 시스템(18)에 대한 시술 신호(OS)의 송신을 종료할 수 있다. 다른 실시예에서, 컨트롤러(20)는 제동 장치(미도시)를 작동시킴으로써 시술 기능(OF)을 추가로 종료하여 외과용 엔드 이펙터(12)의 움직임을 정지시키거나 늦출 수 있다.
단계 106에서, 컨트롤러(20)는 외과용 단부 이펙터(12)가 시술 기능(OF)을 수행하도록 유발하고 외과용 단부 이펙터(12)를 이동시키지 않고, 제 1 방향과 제 2 방향 사이에서 구동 시스템(18)을 진동시킴으로써 피드백 기능을 수행하도록 그립 이벤트의 감지 시에 구동 시스템(18)을 제어할 수 있다. 보다 구체적으로, 컨트롤러(20)는 서로 체결되는 표면들 사이의 공차 내에서 모터(24) 또는 트랜스미션(26)의 하나 이상의 구성 요소를 작동시킬 수 있어서, 하나의 구성 요소의 진동이 다른 구성 요소와 커플러(14)를 이동시키지 않는다.
이 방법을 사용하면 킥백 이벤트로 인해 드릴이 이동을 중지했음을 알 수 있다. 배터리 상태와 킥백 이벤트 간에 표시 방식이 다르면 혼동이 사라진다. 배터리의 시각적 표시기가 종종 배터리의 상태를 알리는 데 사용될 수 있기 때문이다. 킥백 방지 이벤트의 트리거링을 표시하기 위해 동일한 시각적 표시기를 사용하는 경우, 사용자는, 배터리 상태가 장치의 작동을 중지했는지 또는 킥백 이벤트가 장치의 작동을 중지했는지에 관하여 혼동될 수 있다.
전술한 설명에서 여러 실시예들이 논의되었다. 그러나, 본 명세서에서 논의된 실시예는 본 발명을 임의의 특정 형태로 한정하거나 제한하려는 것이 아니다. 사용된 용어는 제한적인 것이 아니라 설명의 특성상 의도된 것이다. 상기 교시에 비추어 많은 수정 및 변형이 가능하며, 본 발명은 구체적으로 설명된 것과 다르게 실시될 수 있다. 또한, 용어("include", "includes" 및 "including")는 용어("comprise", "comprises" 및 "comprising")와 동일하게 번역되었음을 또한 인식해야 할 것이다.
본 개시의 실시예는 다음의 번호가 부여된 절을 참조하여 설명될 수 있으며, 종속 절에 특정 특징이 배치된다 :
Ⅰ. 킥백 이벤트 동안 사용자에게 촉각 피드백을 제공하기 위한 휴대형 외과기구로서, 상기 휴대형 외과기구는 :
입력 신호를 생성하도록 구성된 입력 장치;
구동 시스템으로서,
시술 기능
상기 시술 기능과 별개로, 사용자에게 피드백을 제공하기 위한 피드백 기능을 수행하는 구동 시스템;
외과용 엔드 이펙터를 수용하도록 구성되며, 상기 구동 시스템과 작동 가능하게 결합되는 커플러; 및
상기 구동 시스템 및 상기 입력 장치와 통신하는 컨트롤러로서, 상기 컨트롤러는 상기 입력 장치로부터 상기 입력 신호를 수신하는 것에 답하여 상기 시술 기능을 수행하도록 상기 구동 시스템을 제어하도록 구성되고, 상기 컨트롤러는 외과용 엔드 이펙터가 시술 기능을 수행하지 않으면서 피드백 기능을 수행하도록 상기 출력 부재를 진동시키도록 구성된, 컨트롤러를 포함하는, 휴대형 외과기구.
Ⅱ. 절 I에 있어서, 상기 컨트롤러는 상기 구동 시스템이 상기 피드백 기능을 수행할 때 상기 구동 시스템의 상기 시술 기능을 종료하도록 구성되는, 휴대형 외과기구.
Ⅲ. 절 Ⅰ또는 Ⅱ에 있어서,
휴대형 외과기구의 움직임을 감지하고 그립 이벤트와 연관된 휴대형 외과기구의 움직임에 기초하여 제 1 그립 이벤트 신호를 생성하도록 구성된 자이로스코프; 및
상기 구동 시스템으로의 공급 전류를 감지하고 상기 그립 이벤트와 연관된 상기 공급 전류에 기초하여 제 2 그립 이벤트 신호를 생성하도록 구성된 전류 센서를 더 포함하고;
상기 컨트롤러는 상기 컨트롤러가 상기 제 1 및 제 2 그립을 수신할 때 피드백 신호를 생성하는, 휴대형 외과기구.
IV. 절 Ⅰ, Ⅱ 또는 Ⅲ 중 어느 하나에 있어서, 상기 자이로스코프는 초당 500° 이상의 속도로 휴대형 외과기구의 회전을 감지하도록 구성되는 휴대형 외과기구.
V. 구동 시스템, 상기 구동 시스템과 작동 가능하게 결합된 커플러, 시술 기능을 수행하기 위해 상기 커플러와 작동 가능하게 결합된 외과용 엔드 이펙터, 적어도 하나의 그립 이벤트 신호를 생성하도록 구성된 제 1 센서 및 상기 제 1 센서 및 상기 구동 시스템과 통신하는 컨트롤러를 포함하는 휴대형 외과기구의 사용자에게 피드백을 제공하는 방법으로서, 상기 방법은:
상기 적어도 하나의 그립 이벤트 신호에 기초하여 그립 이벤트를 감지하는 단계;
상기 그립 이벤트가 감지될 때 휴대형 외과기구의 시술 기능을 종료하는 단계; 및
상기 그립 이벤트의 감지시 상기 외과용 엔드 이펙터가 시술 기능을 수행하도록 발생시키지 않고 컨트롤러에 의해 제 1 및 제 2 방향으로 구동 시스템을 진동하도록 구동 시스템을 제어하는 단계를 포함하는, 방법.
VI. 절 V에 있어서, 외과용 단부 이펙터가 상기 시술 기능을 수행하도록 작동시키지 않는 동안 상기 피드백 기능을 수행하도록 상기 구동 시스템을 작동시키는 단계를 더 포함하는, 방법.
Ⅶ. 구동 시스템, 상기 구동 시스템과 작동 가능하게 체결된 커플러, 상기 커플러와 작동 가능하게 체결된 외과용 단부 이펙터, 적어도 하나의 그립 이벤트 신호를 생성하도록 구성된 제 1 센서 및 상기 제 1 센서 및 상기 구동 시스템과 통신하는 컨트롤러를 포함하는 휴대형 외과기구의 사용자에게 피드백을 제공하는 방법으로서, 상기 방법은:
상기 적어도 하나의 그립 이벤트 신호를 기초로 그립 이벤트를 감지하는 단계; 및
상기 그립 이벤트의 감지 시에 촉각 피드백을 생성하는 단계를 포함하는, 방법.
Ⅷ. 구동 시스템, 상기 구동 시스템과 작동 가능하게 체결된 커플러, 휴대형 외과기구에 결합된 착탈가능한 배터리, 상기 커플러에 작동 가능하게 체결된 외과용 단부 이펙터, 적어도 하나의 그립 이벤트 신호를 생성하도록 구성된 제 1 센서 및 상기 제 1 센서와 상기 구동 시스템과 통신하는 컨트롤러를 포함하는 휴대형 수술기구의 사용자에게 피드백을 제공하는 방법으로서, 상기 방법은:
적어도 하나의 그립 이벤트 신호를 기초로 그립 이벤트를 감지하는 단계;
상기 그립 이벤트의 감지 시에 촉각 피드백을 생성하는 단계; 및
상기 착탈가능한 배터리의 상태를 기초로 시각적 표시기를 생성하는 단계를 포함하는, 방법.
Claims (21)
- 킥백(kickback) 발생시 촉각 피드백을 제공하도록 구성된 휴대형 외과기구로서,
회전식 외과용 엔드 이펙터;
상기 회전식 외과용 엔드 이펙터에 작동 가능하게 결합되어 상기 회전식 외과용 엔드 이펙터의 회전을 발생시키도록 구성된 커플러(coupler);
모터 출력 영역을 규정하는 모터 샤프트를 포함하고, 상기 모터 출력 영역을 구동하도록 구성된 모터; 및
상기 모터 출력 영역과 접속하는 트랜스미션 입력 영역을 규정하는 트랜스미션 - 상기 트랜스미션은 상기 트랜스미션 입력 영역에 결합된 트랜스미션 출력 영역을 추가로 규정하고, 상기 트랜스미션 출력 영역은 상기 커플러에 작동 가능하게 결합되고, 상기 트랜스미션은 상기 모터 출력 영역에 관하여 상기 커플러의 속도를 변경하도록 구성되고, 상기 모터 출력 영역 및 상기 트랜스미션 입력 영역은 모터-트랜스미션 인터페이스에서 서로 접속하며, 상기 모터-트랜스미션 인터페이스는 모터-트랜스미션 백래시(backlash)를 가져서, 상기 모터-트랜스미션 백래시내의 상기 모터 출력 영역의 구동이 상기 회전식 외과용 엔드 이펙터의 회전을 발생시키지 않음 - ;
그립 이벤트(grip event) 신호를 생성하도록 구성된 센서; 및
상기 센서로부터 상기 그립 이벤트 신호를 수용하도록 상기 센서와 작동 가능하게 체결된 컨트롤러 - 상기 컨트롤러는 상기 그립 이벤트 신호를 기초로 그립 이벤트를 결정하도록 구성되고, 상기 컨트롤러는 상기 회전식 외과용 엔드 이펙터를 회전시키지 않고 피드백 기능을 수행하기 위해 상기 모터 샤프트를 진동시키도록 구성됨 - 를 포함하는, 휴대형 외과기구. - 청구항 1에 있어서, 상기 그립 이벤트는, 파편이 상기 외과용 엔드 이펙터의 모션을 방해하며 킥백이 외과용 엔드 이펙터로부터 상기 트랜스미션 및 상기 모터를 통해 상기 사용자에게 토크를 전달하도록, 상기 외과용 엔드 이펙터가 시술 기능(operational function)을 수행하기 위하여 작동되는 동안 상기 외과용 엔드 이펙터가 바인딩되고, 핀칭되고 또는 오정렬되는 것을 포함하는, 휴대형 외과기구.
- 청구항 1에 있어서, 상기 커플러는 시술 기능을 수행하기 위해 상기 외과용 엔드 이펙터를 작동시키고 상기 모터에 관련된 상기 외과용 엔드 이펙터의 속도를 변경하기 위해 상기 트랜스미션과 작동 가능하게 체결된 속도 변경 외과용 부착물의 형태인, 휴대형 외과기구.
- 킥백 이벤트 동안 사용자에게 촉각 피드백을 제공하도록 구성된 휴대형 외과기구로서,
외과용 엔드 이펙터에 작동 가능하게 결합되도록 구성된 커플러;
시술 기능을 수행하기 위해 상기 외과용 엔드 이펙터를 작동시키기 위해 상기 커플러와 작동 가능하게 체결된 출력 부재를 포함하는 구동 시스템;
그립 이벤트 신호를 생성하도록 구성된 제 1 센서; 및
상기 제 1 센서로부터 상기 그립 이벤트 신호를 수신하기 위해 상기 제 1 센서와 작동 가능하게 체결된 컨트롤러 - 상기 컨트롤러는 상기 그립 이벤트 신호에 기초하여 그립 이벤트를 결정하도록 구성됨 - 를 포함하고;
상기 컨트롤러는 외과용 엔드 이펙터로 하여금 상기 시술 기능을 수행시키지지 않으면서 피드백 기능을 수행하기 위해 상기 구동 시스템을 제 1 방향 및 제 2 방향으로 진동시키도록 추가로 구성되는, 휴대형 외과기구. - 청구항 4에 있어서, 상기 그립 이벤트는, 파편이 상기 외과용 엔드 이펙터의 모션을 방해하며 킥백이 외과용 엔드 이펙터로부터 상기 트랜스미션 및 상기 모터를 통해 상기 사용자에게 토크를 전달하도록, 상기 외과용 엔드 이펙터가 시술 기능을 수행하기 위하여 작동되는 동안 상기 외과용 엔드 이펙터가 바인딩되고, 핀칭되고 또는 오정렬되는 것을 포함하는, 휴대형 외과기구.
- 청구항 4 또는 청구항 5에 있어서, 상기 컨트롤러는 상기 컨트롤러가 상기 그립 이벤트 신호에 기초하여 상기 그립 이벤트를 결정할 때 상기 출력 부재를 정지시킴으로써 상기 외과용 엔드 이펙터의 상기 시술 기능을 종료하도록 구성되는, 휴대형 외과기구.
- 청구항 4 내지 청구항 6 중 어느 한 항에 있어서, 제 2 센서를 더 포함하고, 상기 제 1 센서는:
상기 그립 이벤트를 나타내는 휴대형 외과기구의 움직임을 감지하도록 구성된 자이로스코프를 포함하고; 그리고
상기 제 2 센서는 상기 그립 이벤트와 관련된 공급 전류를 감지하도록 구성된 전류 센서를 포함하는, 휴대형 외과기구. - 청구항 4 내지 청구항 7 중 어느 한 항에 있어서, 상기 제 1 센서는 적어도 초당 500도의 속도로 휴대형 외과기구의 회전을 감지하도록 구성된 자이로스코프를 포함하는, 휴대형 외과기구.
- 청구항 4 내지 청구항 8 중 어느 한 항에 있어서, 상기 트랜스미션은 복수의 내부 트랜스미션 인터페이스에서 서로 맞물리는 복수의 기어를 포함하고, 상기 내부 트랜스미션 인터페이스들 중 적어도 하나는 내부 트랜스미션 백래시를 포함하는, 휴대형 외과기구.
- 청구항 9에 있어서, 상기 트랜스미션은 복수의 내부 트랜스미션 인터페이스에서 서로 접속하는 복수의 스테이지를 규정하는 유성(planetary) 기어 트레인을 포함하고, 상기 복수의 내부 트랜스미션 인터페이스 중 적어도 하나는 내부 트랜스미션 백래시를 포함하여, 상기 내부 트랜스미션 백래시내의 상기 트랜스미션의 구동이 상기 출력 부재의 구동을 발생시키지 않는, 휴대형 외과기구.
- 청구항 4 내지 청구항 10 중 어느 한 항에 있어서, 상기 구동 시스템은:
모터 출력 영역을 규정하는 모터 샤프트를 포함하고, 상기 모터 출력 영역을 구동하도록 구성된 모터; 및
상기 모터 출력 영역에 작동 가능하게 결합된 트랜스미션 입력 영역을 규정하여 상기 모터 출력 영역이 상기 트랜스미션 입력 영역의 구동을 발생시키도록 구성되는 트랜스미션을 포함하고, 상기 트랜스미션은 상기 트랜스미션 입력 영역에 작동 가능하게 결합된 트랜스미션 출력 영역을 더 규정하여, 상기 트랜스미션 입력 영역의 구동이 상기 트랜스미션 출력 영역의 구동을 발생시키도록 구성되고, 상기 트랜스미션 출력 영역은 상기 출력 부재에 작동 가능하게 결합되어, 상기 트랜스미션 출력 영역의 구동이 상기 출력 부재의 구동을 발생시키고 상기 모터에 관련된 상기 출력 부재의 속도를 변경하도록 구성되며;
상기 모터 출력 영역 및 상기 트랜스미션 입력 영역은 모터-트랜스미션 인터페이스에서 서로 접속하며, 상기 모터-트랜스미션 인터페이스는 모터-트랜스미션 백래시를 가져서, 상기 모터-트랜스미션 백래시내의 상기 모터 출력 영역의 구동이 상기 트랜스미션 입력 영역의 구동을 발생시키지 않는, 휴대형 외과기구. - 청구항 11에 있어서, 상기 트랜스미션 출력 영역에 작동가능하게 결합된 클러치 입력 영역을 규정하는 클러치를 더 포함하여, 상기 트랜스미션 출력 영역의 구동이 상기 클러치 입력 영역의 구동을 발생시키도록 구성되며, 상기 클러치는 상기 출력 부재에 작동 가능하게 결합된 클러치 출력 영역을 추가로 규정하고;
상기 트랜스미션 출력 영역과 상기 클러치 입력 영역은 트랜스미션-클러치 백래시를 갖는 적어도 하나의 트랜스미션-클러치 인터페이스에서 서로 접속하여, 상기 적어도 하나의 트랜스미션-클러치 백래시 내의 상기 트랜스미션 출력 영역의 구동은 상기 클러치 입력 영역의 구동을 발생시키지 않는, 휴대형 외과기구. - 청구항 11에 있어서, 상기 트랜스미션 출력 영역은 2개의 기어 세트를 포함하고, 상기 휴대형 외과기구는 클러치 입력 영역을 규정하는 클러치를 더 포함하고, 상기 클러치 입력 영역은 2개의 기어 세트 중 하나의 세트가 상기 클러치 입력 영역에 작동가능하게 결합되고 상기 클러치 입력 영역의 구동을 발생시키도록 구성되는 제 1 위치로 이동가능하고, 상기 클러치 입력 영역은 2개의 기어 세트 중 다른 하나가 상기 클러치 입력 영역에 작동 가능하게 결합되고 상기 클러치 입력 영역의 구동을 발생시키도록 구성되는 제 2 위치로 또한 이동 가능하며, 상기 클러치는 상기 출력 부재에 작동 가능하게 결합된 클러치 출력 영역을 추가로 규정하고;
상기 제 1 위치의 상기 클러치는 제 1 트랜스미션-클러치 백래시를 갖는 제 1 트랜스미션-클러치 인터페이스에서 상기 2개의 기어 세트 중 하나와 상기 클러치 입력 영역을 접속시키도록 구성되어서 상기 제 1 트랜스미션-클러치 백래시 내에서 상기 트랜스미션 출력 영역의 구동이 상기 클러치 입력 영역의 구동을 발생시키지 않고; 그리고
상기 제 2 위치에서의 상기 클러치는 제 2 트랜스미션-클러치 백래시를 갖는 제 2 트랜스미션-클러치 인터페이스에서 상기 2개의 기어 세트 중 다른 하나와 상기 클러치 입력 영역을 접속시키도록 구성되어서, 상기 제 2 트랜스미션 클러치 백래시 내에서 상기 트랜스미션 출력 영역의 구동이 상기 클러치 입력 영역의 구동을 발생시키지 않는, 휴대형 외과기구. - 청구항 11에 있어서, 상기 커플러는 시술 기능을 수행하기 위해 상기 외과용 엔드 이펙터를 작동시키고 상기 모터에 관련된 상기 외과용 엔드 이펙터의 속도를 변경시키기 위해 상기 출력 부재와 작동 가능하게 체결된 속도 변경 외과용 부착물의 형태인, 휴대형 외과기구.
- 청구항 14에 있어서, 상기 속도 변경 외과용 부착물은:
상기 출력 부재에 작동 가능하게 결합된 샤프트 입력 영역을 규정하여, 상기 출력 부재의 구동이 상기 샤프트 입력 영역의 구동을 발생시키도록 구성되는 중간 샤프트 - 상기 중간 샤프트는 샤프트 출력 영역을 추가로 규정함 - ;
상기 샤프트 출력 영역에 작동 가능하게 결합된 기어 트레인 입력 영역을 규정하여 상기 샤프트 출력 영역의 구동이 상기 기어 트레인 입력 영역의 구동을 발생시키도록 구성되는 기어 트레인 - 상기 기어 트레인은 상기 기어 트레인 입력 영역 및 상기 외과용 엔드 이펙터에 작동가능하게 결합된 기어 트레인 출력 영역을 더 규정하여 상기 기어 트레인 입력 영역의 구동이 상기 기어 트레인 출력 영역의 구동 및 상기 외과용 엔드 이펙터의 작동을 발생시키도록 구성됨 - 을 포함하고;
상기 중간 샤프트의 상기 샤프트 출력 영역은 샤프트-기어 트레인 인터페이스에서 상기 기어 트레인 입력 영역과 접속하고, 상기 샤프트 기어 트레인 인터페이스는 샤프트-기어 트레인 백래시를 포함하여 상기 샤프트-기어 트레인 백래시 내에서의 상기 샤프트 출력 영역의 구동이 상기 기어 트레인 입력 영역의 구동을 발생시키지 않는, 휴대형 외과기구. - 청구항 15에 있어서, 상기 기어 트레인은 복수의 내부 기어 트레인 인터페이스에서 서로 맞물리는 복수의 기어를 포함하고, 상기 내부 기어 트레인 인터페이스 중 적어도 하나는 내부 기어 트레인 백래시를 포함하여 상기 내부 기어 트레인 백래시내의 상기 기어 트레인 입력 영역의 구동은 상기 외과용 엔드 이펙터로 하여금 상기 시술 기능을 수행시키지 않는, 휴대형 외과기구.
- 청구항 4 내지 청구항 16 중 어느 한 항에 있어서, 시각적 표시기를 더 포함하고, 상기 컨트롤러는 상기 컨트롤러가 상기 그립 이벤트 신호에 기초하여 그립 이벤트를 결정할 때 상기 시각적 표시기를 작동시키도록 더 구성되는, 휴대형 외과기구.
- 청구항 17에 있어서, 상기 시각적 표시기는 발광기를 포함하는, 휴대형 외과기구.
- 청구항 17 또는 청구항 18에 있어서, 상기 시각적 표시기는 링형 광 가이드를 포함하는, 휴대형 외과기구.
- 청구항 17 내지 19 중 어느 한 항에 있어서, 배터리를 더 포함하고, 상기 배터리는 상기 시각적 표시기를 포함하는, 휴대형 외과기구.
- 백래시를 갖는 구동 시스템, 상기 구동 시스템과 작동 가능하게 결합된 커플러, 시술 기능을 수행하기 위해 상기 커플러와 작동 가능하게 결합된 외과용 엔드 이펙터, 적어도 하나의 그립 이벤트 신호를 생성하도록 구성된 제 1 센서 및 상기 제 1 센서 및 상기 구동 시스템과 통신하는 컨트롤러를 포함하는 휴대형 외과기구의 사용자에게 피드백을 제공하는 방법으로서, 상기 방법은:
상기 적어도 하나의 그립 이벤트 신호에 기초하여 그립 이벤트를 감지하는 단계; 및
상기 그립 이벤트의 감지시 상기 외과용 엔드 이펙터를 회전시키거나 진동시키지 않고 백래시 내에서 상기 구동 시스템을 진동시키는 단계를 포함하는, 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762546770P | 2017-08-17 | 2017-08-17 | |
| US62/546,770 | 2017-08-17 | ||
| PCT/IB2018/056238 WO2019035088A1 (en) | 2017-08-17 | 2018-08-17 | PORTABLE SURGICAL INSTRUMENT AND METHOD FOR PROVIDING TACTILE FEEDBACK TO A USER DURING A BACK-UP EVENT |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200043426A true KR20200043426A (ko) | 2020-04-27 |
Family
ID=63579547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207007818A Abandoned KR20200043426A (ko) | 2017-08-17 | 2018-08-17 | 킥백 발생 동안 사용자에게 촉각 피드백을 공급하기 위한 휴대형 외과기구 및 방법 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US11278297B2 (ko) |
| EP (1) | EP3668686A1 (ko) |
| JP (1) | JP2020531081A (ko) |
| KR (1) | KR20200043426A (ko) |
| CN (1) | CN111032291A (ko) |
| AU (1) | AU2018316831A1 (ko) |
| BR (1) | BR112020002878A2 (ko) |
| CA (1) | CA3073171A1 (ko) |
| WO (1) | WO2019035088A1 (ko) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11278297B2 (en) * | 2017-08-17 | 2022-03-22 | Stryker Corporation | Handheld surgical instrument and method for supplying tactile feedback to a user during a kickback event |
| US11234701B2 (en) | 2018-09-21 | 2022-02-01 | Covidien Lp | Powered surgical tack applier |
| US11389159B2 (en) | 2018-09-21 | 2022-07-19 | Covidien Lp | Powered surgical tack applier |
| DE102019121121A1 (de) | 2019-08-05 | 2021-02-11 | Aesculap Ag | Medizinische Antriebseinheit der Handheld-Bauart mit Sensoreinrichtung und Kick-Back-Control |
| USD946989S1 (en) * | 2019-10-01 | 2022-03-29 | Think Surgical, Inc. | Power tool |
| US11679485B2 (en) | 2020-01-22 | 2023-06-20 | Medtronic Xomed, Inc. | Powered instrument |
| EP4114284B1 (en) * | 2020-03-04 | 2025-10-22 | Oloïde SA | Surgical instrument for drilling |
| US11641102B2 (en) | 2020-03-10 | 2023-05-02 | Smart Wires Inc. | Modular FACTS devices with external fault current protection within the same impedance injection module |
| DE102020212427A1 (de) * | 2020-10-01 | 2022-04-07 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zur Erfassung eines Getriebespiels in einer Werkzeugmaschine, insbesondere Handwerkzeugmaschine, sowie Werkzeugmaschine |
| CN114376635A (zh) * | 2020-10-05 | 2022-04-22 | 柯惠Lp公司 | 电动手术钉施用器 |
| US11845173B2 (en) | 2020-10-16 | 2023-12-19 | Milwaukee Electric Tool Corporation | Anti bind-up control for power tools |
| EP4294614A1 (en) * | 2021-02-19 | 2023-12-27 | Festool GmbH | Handheld power tools with kickback detection and methods of detecting a kickback condition of a handheld power tool |
| US11835217B2 (en) | 2021-05-06 | 2023-12-05 | Black & Decker Inc. | Light emitting assembly for a power tool |
| US11903592B2 (en) * | 2021-05-10 | 2024-02-20 | DePuy Synthes Products, Inc. | Data modules for surgical instruments |
| DE112022002666T5 (de) * | 2021-05-19 | 2024-03-21 | Koki Holdings Co., Ltd. | Arbeitsmaschine |
| CN116784930B (zh) * | 2021-07-16 | 2025-12-12 | 深圳市鑫君特智能医疗器械有限公司 | 一种骨科置钉装置及骨科置入手术操作系统 |
| USD1027594S1 (en) * | 2022-01-20 | 2024-05-21 | Kurtis Mitthun | Drill |
| JP7737916B2 (ja) * | 2022-01-28 | 2025-09-11 | 株式会社マキタ | アダプタ及び回転工具 |
| CN114948030B (zh) * | 2022-05-23 | 2024-11-19 | 苏州法兰克曼医疗器械有限公司 | 一种多方向控制的电动吻合器 |
Family Cites Families (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4267914A (en) | 1979-04-26 | 1981-05-19 | Black & Decker Inc. | Anti-kickback power tool control |
| US4249117A (en) | 1979-05-01 | 1981-02-03 | Black And Decker, Inc. | Anti-kickback power tool control |
| DE4112012A1 (de) * | 1991-04-12 | 1992-10-15 | Bosch Gmbh Robert | Handwerkzeugmaschine mit blockiersensor |
| US5655412A (en) | 1994-10-24 | 1997-08-12 | Luik; Ilmar | Machine tool free of jerks and vibrations caused by the newtonian reaction forces |
| US6479958B1 (en) * | 1995-01-06 | 2002-11-12 | Black & Decker Inc. | Anti-kickback and breakthrough torque control for power tool |
| JP3264607B2 (ja) | 1995-07-28 | 2002-03-11 | 株式会社モリタ製作所 | 歯科用ハンドピースのモータ制御装置 |
| US5704435A (en) | 1995-08-17 | 1998-01-06 | Milwaukee Electric Tool Corporation | Hand held power tool including inertia switch |
| US5747953A (en) | 1996-03-29 | 1998-05-05 | Stryker Corporation | Cordless, battery operated surical tool |
| DE19641618A1 (de) | 1996-10-09 | 1998-04-30 | Hilti Ag | Einrichtung und Verfahren für handgeführte Werkzeugmaschinen zur Vermeidung von Unfällen durch Werkzeugblockieren |
| US6529834B1 (en) * | 1997-12-04 | 2003-03-04 | Baker Hughes Incorporated | Measurement-while-drilling assembly using gyroscopic devices and methods of bias removal |
| WO1999058076A1 (de) | 1998-05-08 | 1999-11-18 | Heribert Schmid | Arbeitsgerät für bohr-, schneid- und schraubwerkzeuge zu medizinischen zwecken |
| US5993454A (en) * | 1998-09-29 | 1999-11-30 | Stryker Corporation | Drill attachment for a surgical drill |
| DE10021356A1 (de) * | 2000-05-02 | 2001-11-08 | Hilti Ag | Drehendes Elektrohandwerkzeuggerät mit Sicherheitsroutine |
| DE10117121A1 (de) * | 2001-04-06 | 2002-10-17 | Bosch Gmbh Robert | Handwerkzeugmaschine |
| US6960894B2 (en) | 2002-08-01 | 2005-11-01 | Stryker Corporation | Cordless, powered surgical tool |
| US7395871B2 (en) * | 2003-04-24 | 2008-07-08 | Black & Decker Inc. | Method for detecting a bit jam condition using a freely rotatable inertial mass |
| US7497860B2 (en) | 2004-07-09 | 2009-03-03 | Stryker Corporation | Surgical sagittal saw including a handpiece and a removable blade assembly, the blade assembly including a guide bar, a blade head capable of oscillatory movement and a drive rod for actuating the blade head |
| US7552781B2 (en) * | 2004-10-20 | 2009-06-30 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| US7410006B2 (en) * | 2004-10-20 | 2008-08-12 | Black & Decker Inc. | Power tool anti-kickback system with rotational rate sensor |
| CA2612972A1 (en) * | 2005-06-25 | 2007-01-04 | Stryker Corporation | Surgical handpiece with compact clutch and anti-wobble coupling head |
| KR101525372B1 (ko) * | 2005-06-28 | 2015-06-09 | 스트리커 코포레이션 | 슬립 모드 또는 활성 모드로 동작할 수 있는 동력이 있는 수술 도구용 제어 어셈블리 |
| EP2594208B1 (en) | 2005-07-14 | 2015-08-19 | Stryker Corporation | Surgical sagittal saw including a low slap blade mount |
| US8316958B2 (en) * | 2006-07-13 | 2012-11-27 | Black & Decker Inc. | Control scheme for detecting and preventing torque conditions in a power tool |
| US20090065225A1 (en) * | 2007-09-07 | 2009-03-12 | Black & Decker Inc. | Switchable anti-lock control |
| JP2009083039A (ja) * | 2007-09-28 | 2009-04-23 | Panasonic Electric Works Co Ltd | 電動工具 |
| US8752301B2 (en) | 2009-04-08 | 2014-06-17 | Rex George | Chainsaw incorporating a safety device system |
| EP2521832B1 (en) * | 2010-01-07 | 2020-03-25 | Black & Decker, Inc. | Power screwdriver having rotary input control |
| US9266178B2 (en) * | 2010-01-07 | 2016-02-23 | Black & Decker Inc. | Power tool having rotary input control |
| CA2737498C (en) | 2010-04-15 | 2018-06-19 | Simon Fraser University | Intelligent dental handpiece control system |
| JP4916037B2 (ja) * | 2010-07-02 | 2012-04-11 | 株式会社ナカニシ | 歯科用ハンドピースのモータ制御方法及び制御装置 |
| EP2603363A4 (en) | 2010-08-11 | 2015-05-27 | Blount Inc | CHECK DETECTION METHOD AND DEVICE |
| DE102010043032A1 (de) * | 2010-10-28 | 2012-05-03 | Hilti Aktiengesellschaft | Steuerungsverfahren für eine Werkzeugmaschine und eine Werkzeugmaschine |
| EP2465654B1 (en) | 2010-12-17 | 2017-07-26 | Robert Bosch GmbH | Chainsaw |
| AU2011349264B2 (en) | 2010-12-21 | 2016-07-14 | Stryker Corporation | Powered surgical tool with a control module and a sealed unit for protecting a circuit board of the control module from the effects of sterilization |
| US9113940B2 (en) | 2011-01-14 | 2015-08-25 | Covidien Lp | Trigger lockout and kickback mechanism for surgical instruments |
| EP2535139B1 (en) | 2011-06-17 | 2016-04-06 | Dino Paoli S.r.l. | Impact tool |
| JP5810312B2 (ja) | 2011-09-20 | 2015-11-11 | パナソニックIpマネジメント株式会社 | 電動工具 |
| JP5849221B2 (ja) | 2011-09-20 | 2016-01-27 | パナソニックIpマネジメント株式会社 | 電動工具 |
| US9908182B2 (en) * | 2012-01-30 | 2018-03-06 | Black & Decker Inc. | Remote programming of a power tool |
| US10456122B2 (en) * | 2012-03-13 | 2019-10-29 | Medtronic Xomed, Inc. | Surgical system including powered rotary-type handpiece |
| US9193055B2 (en) * | 2012-04-13 | 2015-11-24 | Black & Decker Inc. | Electronic clutch for power tool |
| JP5852509B2 (ja) | 2012-05-29 | 2016-02-03 | 株式会社マキタ | 電動工具 |
| US20140166323A1 (en) * | 2012-09-16 | 2014-06-19 | J. Carl Cooper | Kickback Reduction for Power Tools and Machines |
| DE102013201708B4 (de) * | 2013-02-01 | 2023-12-14 | Robert Bosch Gmbh | Elektrische Werkzeugmaschine und Verfahren zum Steuern der elektrischen Werkzeugmaschine |
| DE102013202832A1 (de) * | 2013-02-21 | 2014-08-21 | Robert Bosch Gmbh | Handwerkzeugmaschine und Verfahren zum Betreiben der Handwerkzeugmaschine |
| EP2799170A1 (de) * | 2013-04-30 | 2014-11-05 | HILTI Aktiengesellschaft | Handwerkzeugmaschine und Steuerungsverfahren |
| US9775609B2 (en) * | 2013-08-23 | 2017-10-03 | Ethicon Llc | Tamper proof circuit for surgical instrument battery pack |
| WO2016025500A1 (en) * | 2014-08-12 | 2016-02-18 | Robert Bosch Gmbh | System and method for kickback detection in a circular saw |
| EP3023203A1 (de) * | 2014-11-20 | 2016-05-25 | HILTI Aktiengesellschaft | Steuerungsverfahren für eine Handwerkzeugmaschine |
| US9895148B2 (en) * | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| DE102015226091A1 (de) * | 2015-12-18 | 2017-06-22 | Robert Bosch Gmbh | Handwerkzeugmaschine mit einem Schlagwerk |
| US10589413B2 (en) * | 2016-06-20 | 2020-03-17 | Black & Decker Inc. | Power tool with anti-kickback control system |
| US11278297B2 (en) * | 2017-08-17 | 2022-03-22 | Stryker Corporation | Handheld surgical instrument and method for supplying tactile feedback to a user during a kickback event |
| GB201800696D0 (en) * | 2018-01-16 | 2018-02-28 | Depuy Ireland Ultd Co | Replaceable battery unit for a surgical power tool |
-
2018
- 2018-08-17 US US16/639,604 patent/US11278297B2/en active Active
- 2018-08-17 EP EP18769494.8A patent/EP3668686A1/en not_active Withdrawn
- 2018-08-17 CN CN201880053269.2A patent/CN111032291A/zh active Pending
- 2018-08-17 KR KR1020207007818A patent/KR20200043426A/ko not_active Abandoned
- 2018-08-17 JP JP2020508364A patent/JP2020531081A/ja active Pending
- 2018-08-17 WO PCT/IB2018/056238 patent/WO2019035088A1/en not_active Ceased
- 2018-08-17 CA CA3073171A patent/CA3073171A1/en active Pending
- 2018-08-17 AU AU2018316831A patent/AU2018316831A1/en not_active Abandoned
- 2018-08-17 BR BR112020002878-9A patent/BR112020002878A2/pt not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020531081A (ja) | 2020-11-05 |
| CN111032291A (zh) | 2020-04-17 |
| US11278297B2 (en) | 2022-03-22 |
| BR112020002878A2 (pt) | 2020-07-28 |
| EP3668686A1 (en) | 2020-06-24 |
| CA3073171A1 (en) | 2019-02-21 |
| US20200222061A1 (en) | 2020-07-16 |
| WO2019035088A1 (en) | 2019-02-21 |
| AU2018316831A1 (en) | 2020-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200043426A (ko) | 킥백 발생 동안 사용자에게 촉각 피드백을 공급하기 위한 휴대형 외과기구 및 방법 | |
| US12011148B2 (en) | Surgical system including powered rotary-type handpiece | |
| JP5174658B2 (ja) | 小型クラッチおよび揺動防止連結ヘッドを有する外科用ハンドピース | |
| EP1487359B1 (en) | Powered surgical apparatus | |
| US4157714A (en) | Wire inserter and sterile wire pack | |
| JP2005534420A (ja) | コードレス電動外科用器具 | |
| JP2014097377A (ja) | 付属品シャフトの突出し長さの微調整または粗調整を容易にする連結アセンブリを有する、付属品のシャフトを回転させるための医学/外科用電動ハンドピース | |
| US20250221718A1 (en) | Powered Surgical Drill Having A Depth Measurement Extension | |
| JP2022135875A (ja) | 整形外科用電動器具 | |
| AU2013200390B2 (en) | Surgical handpiece with compact clutch |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200317 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210720 Comment text: Request for Examination of Application |
|
| PC1902 | Submission of document of abandonment before decision of registration |