KR20200047121A - 레이어 재밍 구동장치 - Google Patents
레이어 재밍 구동장치 Download PDFInfo
- Publication number
- KR20200047121A KR20200047121A KR1020180129173A KR20180129173A KR20200047121A KR 20200047121 A KR20200047121 A KR 20200047121A KR 1020180129173 A KR1020180129173 A KR 1020180129173A KR 20180129173 A KR20180129173 A KR 20180129173A KR 20200047121 A KR20200047121 A KR 20200047121A
- Authority
- KR
- South Korea
- Prior art keywords
- layer
- driving device
- enclosure
- jamming driving
- stack
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/1075—Program-controlled manipulators characterised by positioning means for manipulator elements with muscles or tendons
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D59/00—Self-acting brakes, e.g. coming into operation at a predetermined speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/1005—Program-controlled manipulators characterised by positioning means for manipulator elements comprising adjusting means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0004—Braking devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Program-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1659—Free spatial automatic movement of interface within a working area, e.g. Robot
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2121/00—Type of actuator operation force
- F16D2121/14—Mechanical
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- General Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Rheumatology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Transmission Devices (AREA)
- Manipulator (AREA)
Abstract
Description
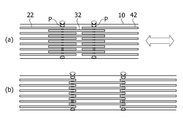
도 2는 본 발명의 일 실시예에 따른 레이어 재밍 구동장치의 평면도.
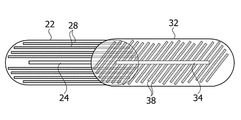
도 3은 본 발명의 레이어 적층체의 연결 구조를 보인 도면.
도 4는 본 발명의 연결 레이어 및 스트링을 보인 도면.
도 5는 본 발명의 레이어 적층체의 다양한 구동예를 보인 도면.
도 6은 본 발명의 레이어 적층체의 다른 연결 구조를 보인 도면.
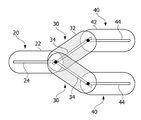
도 7은 본 발명의 레이어 적층체의 Y자형 결합 구조를 보인 도면.
도 8은 본 발명의 레이어의 표면에 회전형 돌기가 형성된 것을 보인 도면.
도 9는 본 발명의 레이어의 표면에 패턴면이 형성된 것을 보인 도면.
도 10은 본 발명의 홀더의 다양한 실시예를 보인 도면.
14 : 벤딩홈 20 : 제1 레이어 적층체
22 : 제1 레이어 24 : 제1 슬라이딩 슬롯
26 : 제1 회전형 돌기 28 : 제1 패턴면
30 : 제2 레이어 적층체 32 : 제2 레이어
34 : 제2 슬라이딩 슬롯 38 : 제2 패턴면
40 : 제3 레이어 적층체 42 : 제3 레이어
44 : 제3 슬라이딩 슬롯 50 : 지지 레이어 적층체
52 : 지지 레이어 54 : 연결 레이어
55 : 연결홀 56 : 스트링
60,160 : 홀더 62,162 : 고정단
Claims (15)
- 가변 가능한 재질의 인클로저; 및
상기 인클로저의 내부에 복수개의 레이어가 적층되는 레이어 적층체를 포함하고,
상기 레이어 적층체는 각각이 서로 슬라이딩됨과 동시에 회전가능하게 결합되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 레이어의 중앙에는 길이방향으로 슬라이딩 슬롯이 형성되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 2 항에 있어서,
서로 인접한 상기 레이어 적층체는 상하면에 각각 구비되어 스트링에 의해 연결되는 연결 레이어에 의해 서로 회전가능하게 결합되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 2 항에 있어서,
서로 인접한 상기 레이어 적층체는 상기 슬라이딩 슬롯을 관통하는 축핀에 의해 서로 회전가능하게 결합되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 인클로저의 양단부에는 상기 레이어 적층체의 단부를 고정하기 위한 홀더가 구비되는데, 상기 홀더의 서로 마주보는 면에는 고정단이 중앙 높이에서 연장되도록 형성되어 상기 고정단의 상하면에 각각 상기 레이어 적층체가 고정되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 인클로저의 양단부에는 상기 레이어 적층체의 단부를 고정하기 위한 홀더가 구비되는데,
상기 레이어 적층체의 양단부에는 상기 홀더에의 고정을 위한 지지 레이어 적층체가 결합되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 6 항에 있어서,
상기 지지 레이어 적층체는 복수개의 지지 레이어가 적층되어 형성되고,
상기 레이어 적층체는 상기 지지 레이어 적층체에 대하여 슬라이딩됨과 동시에 회전가능하게 결합되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 레이어의 양단부는 라운드지게 형성되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 레이어의 적어도 일단부의 표면에는 회전방향을 따라 경사지게 회전형 돌기가 돌출되어 구비되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 레이어의 표면에는 선형 또는 곡선형의 패턴면이 형성되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 인클로저의 외면에는 상기 인클로저의 변형이 잘 이루어지도록 벤딩홈이 형성되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 11 항에 있어서,
상기 벤딩홈은 상기 레이어 적층체 간의 결합부위에 인접하게 형성되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 인클로저에서 상기 레이어 적층체 간의 결합부위는 다른 부분에 비하여 얇게 형성되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항에 있어서,
상기 레이어 적층체는 어느 하나의 레이어 적층체의 단부에서 2개 이상의 레이어 적층체가 병렬로 결합되는 것을 특징으로 하는 레이어 재밍 구동장치. - 제 1 항 내지 제 14 항 중 어느 한 항에 따른 레이어 재밍 구동장치가 적용된 웨어러블 로봇.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180129173A KR102152157B1 (ko) | 2018-10-26 | 2018-10-26 | 레이어 재밍 구동장치 |
| PCT/KR2019/007852 WO2020085611A1 (ko) | 2018-10-26 | 2019-06-28 | 레이어 재밍 구동장치 |
| US17/287,863 US12059805B2 (en) | 2018-10-26 | 2019-06-28 | Layer jamming driving device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180129173A KR102152157B1 (ko) | 2018-10-26 | 2018-10-26 | 레이어 재밍 구동장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200047121A true KR20200047121A (ko) | 2020-05-07 |
| KR102152157B1 KR102152157B1 (ko) | 2020-09-07 |
Family
ID=70332067
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180129173A Active KR102152157B1 (ko) | 2018-10-26 | 2018-10-26 | 레이어 재밍 구동장치 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12059805B2 (ko) |
| KR (1) | KR102152157B1 (ko) |
| WO (1) | WO2020085611A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210148495A (ko) * | 2020-05-28 | 2021-12-08 | 중앙대학교 산학협력단 | 전기 정지 마찰력을 이용한 가변 강성 메커니즘 |
| KR20220097746A (ko) * | 2020-12-31 | 2022-07-08 | 중앙대학교 산학협력단 | 전기 정지 마찰력을 이용한 가변 강성 근력보조장치 및 그 제어방법 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025034686A1 (en) * | 2023-08-05 | 2025-02-13 | Massachusetts Institute Of Technology | Switchable clutch based on self-amplified friction of interleaved layers |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150112591A (ko) * | 2014-03-28 | 2015-10-07 | 삼성전자주식회사 | 링크 조립체, 프레임 및 이를 포함하는 보행보조로봇 |
| US9664210B2 (en) | 2013-10-19 | 2017-05-30 | Massachusetts Institute Of Technology | Methods and apparatus for layer jamming |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011079865A1 (en) * | 2009-12-30 | 2011-07-07 | Fundacion Fatronik | Fitting element with controlled stiffness |
| US10864104B2 (en) * | 2014-12-19 | 2020-12-15 | 3M Innovative Properties Company | Methods of using a shape-formable apparatus comprising locking sheets |
| US10564722B2 (en) | 2015-11-20 | 2020-02-18 | Facebook Technologies, Llc | Restricting user movement via connecting tendons in a garment to a jamming mechanism |
| WO2017120314A1 (en) | 2016-01-05 | 2017-07-13 | President And Fellows Of Harvard College | Fabric-based soft actuators |
| US10013062B1 (en) | 2017-06-09 | 2018-07-03 | Oculus Vr, Llc | Fluid-actuated haptic feedback jamming device for movement restriction in haptic devices |
| EP3644823A4 (en) * | 2017-06-26 | 2021-07-07 | Poisson Holdings LLC | ROBOTIC MATERIALS AND CORRESPONDING DEVICES |
| WO2020003175A1 (en) * | 2018-06-28 | 2020-01-02 | 3M Innovative Properties Company | Electrostatic jamming devices and methods of making such devices |
| EP3986673A1 (en) * | 2019-06-24 | 2022-04-27 | 3M Innovative Properties Company | Segmented sheet jamming devices and components |
-
2018
- 2018-10-26 KR KR1020180129173A patent/KR102152157B1/ko active Active
-
2019
- 2019-06-28 US US17/287,863 patent/US12059805B2/en active Active
- 2019-06-28 WO PCT/KR2019/007852 patent/WO2020085611A1/ko not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9664210B2 (en) | 2013-10-19 | 2017-05-30 | Massachusetts Institute Of Technology | Methods and apparatus for layer jamming |
| KR20150112591A (ko) * | 2014-03-28 | 2015-10-07 | 삼성전자주식회사 | 링크 조립체, 프레임 및 이를 포함하는 보행보조로봇 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210148495A (ko) * | 2020-05-28 | 2021-12-08 | 중앙대학교 산학협력단 | 전기 정지 마찰력을 이용한 가변 강성 메커니즘 |
| KR20220097746A (ko) * | 2020-12-31 | 2022-07-08 | 중앙대학교 산학협력단 | 전기 정지 마찰력을 이용한 가변 강성 근력보조장치 및 그 제어방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210379754A1 (en) | 2021-12-09 |
| WO2020085611A1 (ko) | 2020-04-30 |
| KR102152157B1 (ko) | 2020-09-07 |
| US12059805B2 (en) | 2024-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7062758B2 (ja) | バスバーを加圧する加圧ジグ及びそれを含むバッテリーモジュール製造システム | |
| KR102152157B1 (ko) | 레이어 재밍 구동장치 | |
| CN104070530A (zh) | 机器人手以及机器人 | |
| CN116141299B (zh) | 可重构绳驱动的柔性外肢体机械臂及机器人 | |
| WO2013012029A1 (ja) | 多指ハンド装置 | |
| JP2019198946A (ja) | 把持装置およびロボット | |
| US20210197403A1 (en) | Robot hand | |
| KR101369515B1 (ko) | 가변 강성 구조체 | |
| JP2012527033A (ja) | 平面3自由度ステージ | |
| KR102250605B1 (ko) | 로봇 관절구조 및 이를 포함하는 로봇손 | |
| WO2012176610A1 (ja) | 指刺激呈示装置 | |
| KR101257379B1 (ko) | 관절구동장치 | |
| US8791623B2 (en) | Piezoelectric actuator and piezoelectric actuator array | |
| JP3569674B2 (ja) | 3軸以上の多軸リンクを一点で連結する球形ジョイント | |
| JP6991395B2 (ja) | 湾曲スペーサ部材を備えた把持フィンガ及び適応型把持装置 | |
| CN116509551A (zh) | 手术器械的末端执行机构及手术器械 | |
| WO2023008275A1 (ja) | 屈曲構造体及びその製造方法 | |
| KR101668714B1 (ko) | 로봇 관절 메커니즘 | |
| KR102353298B1 (ko) | 전기 정지 마찰력을 이용한 가변 강성 메커니즘 | |
| KR102362574B1 (ko) | 로봇손 및 로봇손의 손가락 기구 | |
| JP2004280355A (ja) | 移動装置およびそれを用いた位置決め装置 | |
| KR20120131975A (ko) | 로봇 관절체 메커니즘 | |
| CN101512183A (zh) | 传动带的组装装置、组装方法和制造方法 | |
| KR102726945B1 (ko) | 제동 메커니즘이 구현된 고자유도 매니퓰레이터용 단위모듈 및 이를 포함하는 매니퓰레이터 | |
| JP4260047B2 (ja) | 関節ロック機構及びそれを備えた把持ハンド |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181026 |
|
| PA0201 | Request for examination | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200218 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20200619 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20200831 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20200901 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20230620 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240624 Start annual number: 5 End annual number: 5 |