KR20200047307A - 유용한 학습 데이터를 취사 선별하기 위한 cnn 기반 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 - Google Patents
유용한 학습 데이터를 취사 선별하기 위한 cnn 기반 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 Download PDFInfo
- Publication number
- KR20200047307A KR20200047307A KR1020190105486A KR20190105486A KR20200047307A KR 20200047307 A KR20200047307 A KR 20200047307A KR 1020190105486 A KR1020190105486 A KR 1020190105486A KR 20190105486 A KR20190105486 A KR 20190105486A KR 20200047307 A KR20200047307 A KR 20200047307A
- Authority
- KR
- South Korea
- Prior art keywords
- feature map
- learning
- cnn module
- loss
- testing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/084—Backpropagation, e.g. using gradient descent
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G06N3/0454—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/0464—Convolutional networks [CNN, ConvNet]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/09—Supervised learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/094—Adversarial learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/04—Inference or reasoning models
- G06N5/046—Forward inferencing; Production systems
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/255—Detecting or recognising potential candidate objects based on visual cues, e.g. shapes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
- G06V10/443—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components by matching or filtering
- G06V10/449—Biologically inspired filters, e.g. difference of Gaussians [DoG] or Gabor filters
- G06V10/451—Biologically inspired filters, e.g. difference of Gaussians [DoG] or Gabor filters with interaction between the filter responses, e.g. cortical complex cells
- G06V10/454—Integrating the filters into a hierarchical structure, e.g. convolutional neural networks [CNN]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/772—Determining representative reference patterns, e.g. averaging or distorting patterns; Generating dictionaries
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/774—Generating sets of training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/048—Activation functions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Software Systems (AREA)
- Data Mining & Analysis (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Computational Linguistics (AREA)
- Mathematical Physics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Biophysics (AREA)
- Multimedia (AREA)
- Databases & Information Systems (AREA)
- Medical Informatics (AREA)
- Biodiversity & Conservation Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Image Analysis (AREA)
Abstract
Description
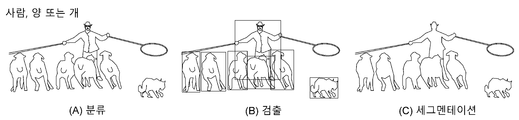
도 1은 기존 기술에 따른 CNN을 통해 이미지에서 획득된 다양한 출력의 예를 나타낸다.
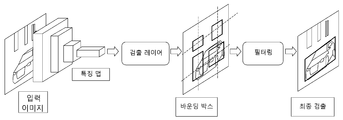
도 2는 기존 기술에 따른 상기 CNN을 이용한 검출 방법을 간략하게 나타낸다.
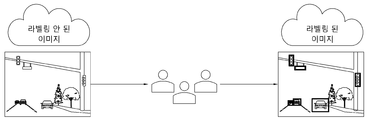
도 3은 기존 기술에 따른 학습용 이미지 데이터베이스를 구축하는 방법을 간략하게 나타낸다.
도 4는 본 발명에 따른 학습 데이터로 사용될 유용한 이미지를 선별하기 위한 자동 선별 시스템(Auto-Screening System)을 학습하는 방법을 나타낸다.
도 5는 본 발명에 따른 상기 자동 선별 시스템에 의해 수행되는 구체적인 연산 과정을 나타낸다.
도 6은 본 발명에 따른 상기 자동 선별 시스템을 통해 학습용 이미지 데이터베이스를 구축하는 방법을 나타낸다.
Claims (30)
- 유용한 학습 데이터를 취사 선별하기 위한 CNN 기반 학습 방법에 있어서,
(a) 학습 장치가, 적어도 하나의 입력 이미지가 획득되면, (i) 상기 입력 이미지 내의 특정 객체의 식별 정보나 위치 정보를 획득하기 위한 제1 CNN 모듈로 하여금 상기 입력 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하도록 하여 제1 특징 맵을 생성하는 프로세스, 및 (ii) 상기 제1 CNN 모듈의 학습 프로세스에 사용될 유용한 학습 데이터를 자동 선별(Auto-Screening) 할 수 있는 제2 CNN 모듈로 하여금 상기 입력 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하도록 하여 제2 특징 맵을 생성하는 프로세스를 수행하는 단계;
(b) 상기 학습 장치가, 상기 제1 CNN 모듈로 하여금 상기 제1 특징 맵을 이용하여 상기 특정 객체의 상기 식별 정보나 상기 위치 정보를 나타내는 제1 출력을 생성하도록 하고, 상기 제1 출력과 이에 해당하는 GT 이미지를 참조하여 제1 로스를 산출하게 하는 단계;
(c) 상기 학습 장치가, 상기 제1 특징 맵을 상기 제2 CNN 모듈에 입력하여, 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵과 상기 제2 특징 맵의 크기를 동일하게 변경한 후, 상기 제1 특징 맵과 상기 제2 특징 맵을 통합하여, 제3 특징 맵을 생성하는 단계;
(d) 상기 학습 장치가, 상기 제2 CNN 모듈로 하여금, 상기 제3 특징 맵에 적어도 한 번 컨벌루션 연산을 적용하여 제4 특징 맵을 생성하고, 상기 제4 특징 맵을 이용하여 상기 제1 로스의 예측 값에 해당하는 제2 로스를 산출하게 하는 단계;
(e) 상기 학습 장치가, 상기 제1 로스와 상기 제2 로스를 참조하여 자동 선별기 로스(Auto-Screener's Loss)를 산출하는 단계; 및
(f) 상기 학습 장치가, 상기 자동 선별기 로스를 이용해 백프로파게이션(Backpropagation)을 수행하여 상기 제2 CNN 모듈의 적어도 하나의 파라미터를 최적화 하는 단계;
를 포함하는 것을 특징으로 하는 방법. - 제 1 항에 있어서,
상기 (f) 단계에서,
상기 학습 장치가, 상기 제1 로스를 이용해 백프로파게이션을 수행하여 상기 제1 CNN 모듈의 적어도 하나의 파라미터를 최적화하는 것을 특징으로 하는 방법. - 제 1 항에 있어서,
상기 제1 CNN 모듈은 상기 특정 객체의 크기와 위치를 검출하기 위한 객체 검출 시스템(Object Detection System), 상기 특정 객체의 종류를 식별하기 위한 분류 시스템(Classification System) 및 상기 특정 객체의 영역을 다른 영역과 구분하기 위한 세그멘테이션 시스템(Segmentation System) 중 하나에 포함되며,
상기 제2 CNN 모듈은 적어도 하나의 특정 입력 이미지를 자동으로 선별하기 위한 자동 선별 시스템(Auto-Screening System)에 포함되되, 상기 특정 입력 이미지는 상기 제1 CNN 모듈에 입력되는 복수의 입력 이미지 중에 포함되고, 상기 특정 입력 이미지에 대응하며 정확하게 검출될 확률이 낮은 특정 객체 각각을 포함하며,
상기 제1 출력은 상기 객체 검출 시스템의 출력, 상기 분류 시스템의 출력 및 상기 세그멘테이션 시스템의 출력 중 하나를 나타내고,
확률이 소정의 임계치 미만인지 여부에 대한 정보를 참조로 하여 상기 정확하게 검출될 확률이 낮은지 여부가 결정되는 것을 특징으로 하는 방법. - 제 1 항에 있어서,
상기 제2 특징 맵의 크기는 상기 제1 특징 맵보다 크고,
상기 (c) 단계에서,
상기 학습 장치는 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵의 크기를 상기 제2 특징 맵 크기에 맞도록 키우게 하는 것을 특징으로 하는 방법. - 제 4 항에 있어서,
상기 (c) 단계에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵에 소정 횟수만큼 컨벌루션 연산을 적용하도록 하여, 상기 제1 특징 맵의 크기를 상기 제2 특징 맵의 크기와 같도록 변경하게 하는 것을 특징으로 하는 방법. - 제 1 항에 있어서,
상기 (c) 단계에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵과 상기 제2 특징 맵을 컨캐터네이팅하여, 상기 제3 특징 맵을 생성하도록 하는 것을 특징으로 하는 방법. - 제 1 항에 있어서,
상기 (d) 단계에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 제4 특징 맵이 풀링 레이어(Pooling Layer) 및 FC 레이어(Fully-Connected Layer) 중 적어도 하나를 통과하게 하여 상기 제2 로스를 산출하는 것을 특징으로 하는 방법. - 제 7 항에 있어서,
상기 풀링 레이어는 상기 제4 특징 맵의 높이 및 너비를 1로 만드는 것을 특징으로 하는 방법. - 제 1 항에 있어서,
상기 (f) 단계에서,
상기 학습 장치는, 상기 자동 선별기 로스를 최소화하는 방향으로 백프로파게이션을 수행하는 것을 특징으로 하는 방법. - CNN을 기반으로 유용한 학습 데이터를 취사 선별하기 위한 방법에 있어서,
(a) (I) 학습 장치가, (i) 트레이닝 이미지 내의 특정 객체의 식별 정보나 위치 정보를 획득하기 위한 제1 CNN 모듈로 하여금, 상기 트레이닝 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하게 하여 학습용 제1 특징 맵을 생성하고, (ii) 상기 제1 CNN 모듈의 학습 프로세스에 사용될 유용한 학습 데이터를 자동 선별(Auto-Screening)하기 위한 제2 CNN 모듈로 하여금, 상기 트레이닝 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하게 하여 학습용 제2 특징 맵을 생성하는 프로세스, (II) 상기 학습 장치가 상기 제1 CNN 모듈로 하여금 상기 학습용 제1 특징 맵을 이용해 상기 특정 객체의 상기 식별 정보나 상기 위치 정보를 나타내는 학습용 제1 출력을 생성하게 한 후, 상기 학습용 제1 출력과 이에 대응하는 GT 이미지를 참조하여 제1 로스를 산출하게 하는 프로세스, (III) 상기 학습 장치가 상기 학습용 제1 특징 맵을 상기 제2 CNN 모듈에 입력하여, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵과 상기 학습용 제2 특징 맵의 크기를 동일하게 변경한 후, 상기 학습용 제1 특징 맵과 상기 학습용 제2 특징 맵을 통합하여, 학습용 제3 특징 맵을 생성하게 하는 프로세스, (IV) 상기 학습 장치가 상기 제2 CNN 모듈로 하여금, 상기 학습용 제3 특징 맵에 적어도 한 번 컨벌루션 연산을 적용하게 하여 학습용 제4 특징 맵을 생성하고, 상기 학습용 제4 특징 맵을 이용해 상기 제1 로스의 예측 값에 해당하는 제2 로스를 산출하게 하는 프로세스, (V) 상기 학습 장치가 상기 제1 로스와 상기 제2 로스를 참조하여 자동 선별기 로스(Auto-Screener's Loss)를 산출하는 프로세스, 및 (VI) 상기 학습 장치가 상기 자동 선별기 로스를 이용해 백프로파게이션을 수행하여 상기 제2 CNN 모듈의 적어도 하나의 파라미터를 최적화하는 프로세스를 수행한 상태에서, 테스트 장치가, 각각의 이미지 후보를 각각의 테스트 이미지로서 획득하는 단계;
(b) 상기 테스트 장치가, (i) 상기 제1 CNN 모듈로 하여금, 상기 테스트 이미지에 대하여 컨벌루션 연산을 적어도 한 번 적용하게 하여 테스트용 제1 특징 맵을 생성하는 프로세스, 및 (ii) 상기 제2 CNN 모듈로 하여금, 상기 테스트 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하게 하여 테스트용 제2 특징 맵을 생성하는 프로세스를 수행하는 단계;
(c) 상기 테스트 장치가, 상기 테스트용 제1 특징 맵을 상기 제2 CNN 모듈에 입력하여, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵과 상기 테스트용 제2 특징 맵의 크기를 동일하게 변경한 후, 상기 테스트용 제1 특징 맵과 상기 테스트용 제2 특징 맵을 통합하여, 테스트용 제3 특징 맵을 생성하게 하는 단계;
(d) 상기 테스트 장치가, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제3 특징 맵에 대하여 적어도 한 번 컨벌루션 연산을 적용하게 하여 테스트용 제4 특징 맵을 생성하고, 상기 테스트용 제4 특징 맵을 이용해 로스 예측 값을 산출하게 하는 단계; 및
(e) 상기 테스트 장치가, 상기 입력 이미지 후보 중에서 상기 로스 예측 값이 소정의 임계치 이상의 값을 갖는 적어도 하나의 이미지를 상기 제1 CNN 모듈의 학습 프로세스에 사용되는 트레이닝 이미지로서 선별하는 단계;
를 포함하는 것을 특징으로 하는 방법. - 제 10 항에 있어서,
상기 제1 CNN 모듈은 상기 특정 객체의 크기와 위치를 검출하기 위한 객체 검출 시스템, 상기 특정 객체의 종류를 식별하기 위한 분류 시스템 및 상기 특정 객체의 영역을 다른 영역과 구분하기 위한 세그멘테이션 시스템 중 하나에 포함되며,
상기 제2 CNN 모듈은 상기 트레이닝 이미지를 자동으로 선별하기 위한 자동 선별 시스템(Auto-Screening System)에 포함되되, 상기 트레이닝 이미지는 상기 제1 CNN 모듈에 입력되는 복수의 트레이닝 이미지 중에 포함되고, 상기 특정 객체에 대응하며 정확하게 검출될 확률이 낮은 특정 객체 각각을 포함하며,
상기 학습용 제1 출력은 상기 객체 검출 시스템의 출력, 상기 분류 시스템의 출력 및 상기 세그멘테이션 시스템의 출력 중 하나를 나타내고,
확률이 소정의 임계치 미만인지 여부에 대한 정보를 참조로 하여 상기 정확하게 검출될 확률이 낮은지 여부가 결정되는 것을 특징으로 하는 방법. - 제 10 항에 있어서,
상기 학습용 제2 특징 맵의 크기는 상기 학습용 제1 특징 맵보다 크고,
상기 (III) 프로세스에서, 상기 학습 장치는 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵의 크기를 상기 학습용 제2 특징 맵 크기에 맞도록 키우게 하며,
상기 테스트용 제2 특징 맵의 크기는 상기 테스트용 제1 특징 맵보다 크고,
상기 (c) 단계에서, 상기 테스트 장치는 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵의 크기를 상기 테스트용 제2 특징 맵 크기에 맞도록 키우게 하는 것을 특징으로 하는 방법. - 제 12 항에 있어서,
상기 (III) 프로세스에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵에 소정 횟수만큼 컨벌루션 연산을 적용하도록 하여 상기 학습용 제1 특징 맵의 크기를 상기 학습용 제2 특징 맵의 크기와 같도록 변경하게 하고,
상기 (c) 단계에서,
상기 테스트 장치는, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵에 소정 횟수만큼 컨벌루션 연산을 적용하도록 하여 상기 테스트용 제1 특징 맵의 크기를 상기 테스트용 제2 특징 맵의 크기와 같도록 변경하게 하는 것을 특징으로 하는 방법. - 제 10 항에 있어서,
상기 (III) 프로세스에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵과 상기 학습용 제2 특징 맵을 컨캐터네이팅하도록 하여 상기 학습용 제3 특징 맵을 생성하게 하고,
상기 (c) 단계에서,
상기 테스트 장치는, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵과 상기 테스트용 제2 특징 맵을 컨캐터네이팅하도록 하여 상기 테스트용 제3 특징 맵을 생성하게 하는 것을 특징으로 하는 방법. - 제 10 항에 있어서,
상기 (IV) 프로세스에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제4 특징 맵이 풀링 레이어 및 FC 레이어 중 적어도 하나를 통과하게 하여 상기 제2 로스를 산출하고,
상기 (d) 단계에서,
상기 테스트 장치는, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제4 특징 맵이 풀링 레이어 및 FC 레이어 중 적어도 하나를 통과하게 하여 상기 로스 예측 값을 산출하는 것을 특징으로 하는 방법. - 유용한 학습 데이터를 취사 선별하기 위한 CNN 기반 학습 장치에 있어서,
적어도 하나의 입력 이미지를 획득하기 위한 통신부; 및
(I) (I-1) 상기 입력 이미지 내의 특정 객체의 식별 정보나 위치 정보를 획득하기 위한 제1 CNN 모듈로 하여금 상기 입력 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하도록 하여 제1 특징 맵을 생성하고, (I-2) 상기 제1 CNN 모듈의 학습 프로세스에 사용될 유용한 학습 데이터를 자동 선별(Auto-Screening)하기 위한 제2 CNN 모듈로 하여금 상기 입력 이미지에 대하여 적어도 한 번 컨벌루션 연산을 수행하도록 하여 제2 특징 맵을 생성하는 프로세스, (II) 상기 제1 CNN 모듈로 하여금 상기 제1 특징 맵을 이용해 상기 특정 객체의 상기 식별 정보나 상기 위치 정보를 나타내는 제1 출력을 생성하도록 하고, 상기 제1 출력과 이에 해당하는 GT 이미지를 참조하여 제1 로스를 산출하게 하는 프로세스, (III) 상기 제1 특징 맵을 상기 제2 CNN 모듈에 입력하여, 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵과 상기 제2 특징 맵의 크기를 동일하게 변경한 후, 상기 제1 특징 맵과 상기 제2 특징 맵을 통합하여, 제3 특징 맵을 생성하는 프로세스, (IV) 상기 제2 CNN 모듈로 하여금, 상기 제3 특징 맵에 적어도 한 번 컨벌루션 연산을 적용하여 제4 특징 맵을 생성하고, 상기 제4 특징 맵을 이용하여 상기 제1 로스의 예측 값에 해당하는 제2 로스를 산출하게 하는 프로세스, (V) 상기 제1 로스와 상기 제2 로스를 참조하여 자동 선별기 로스(Auto-Screener's Loss)를 산출하는 프로세스, 및 (VI) 상기 자동 선별기 로스를 이용해 백프로파게이션(Backpropagation)을 수행하여 상기 제2 CNN 모듈의 적어도 하나의 파라미터를 최적화 하는 프로세스를 수행하는 프로세서;
를 포함하는 것을 특징으로 하는 장치. - 제 16 항에 있어서,
상기 (VI) 프로세스에서,
상기 프로세서가, 상기 제1 로스를 이용해 백프로파게이션을 수행하여 상기 제1 CNN 모듈의 적어도 하나의 파라미터를 최적화하는 프로세스를 수행하는 것을 특징으로 하는 장치. - 제 16 항에 있어서,
상기 제1 CNN 모듈은 상기 특정 객체의 크기와 위치를 검출하기 위한 객체 검출 시스템(Object Detection System), 상기 특정 객체의 종류를 식별하기 위한 분류 시스템(Classification System) 및 상기 특정 객체의 영역을 다른 영역과 구분하기 위한 세그멘테이션 시스템(Segmentation System) 중 하나에 포함되며,
상기 제2 CNN 모듈은 적어도 하나의 특정 입력 이미지를 자동으로 선별하기 위한 자동 선별 시스템(Auto-Screening System)에 포함되되, 상기 특정 입력 이미지는 상기 제1 CNN 모듈에 입력되는 복수의 입력 이미지 중에 포함되고, 상기 특정 입력 이미지에 대응하며 정확하게 검출될 확률이 낮은 특정 객체 각각을 포함하며,
상기 제1 출력은 상기 객체 검출 시스템의 출력, 상기 분류 시스템의 출력 및 상기 세그멘테이션 시스템의 출력 중 하나를 나타내고,
확률이 소정의 임계치 미만인지 여부에 대한 정보를 참조로 하여 상기 정확하게 검출될 확률이 낮은지 여부가 결정되는 것을 특징으로 하는 장치. - 제 16 항에 있어서,
상기 제2 특징 맵의 크기는 상기 제1 특징 맵보다 크고,
상기 (III) 프로세스에서, 상기 프로세서는 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵의 크기를 상기 제2 특징 맵 크기에 맞도록 키우게 하는 것을 특징으로 하는 장치. - 제 19 항에 있어서,
상기 (III) 프로세스에서,
상기 프로세서는, 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵에 소정 횟수만큼 컨벌루션 연산을 적용하도록 하여, 상기 제1 특징 맵의 크기를 상기 제2 특징 맵의 크기와 같도록 변경하게 하는 것을 특징으로 하는 장치. - 제 16 항에 있어서,
상기 (III) 프로세스에서,
상기 프로세서는, 상기 제2 CNN 모듈로 하여금, 상기 제1 특징 맵과 상기 제2 특징 맵을 컨캐터네이팅하여, 상기 제3 특징 맵을 생성하도록 하는 것을 특징으로 하는 장치. - 제 16 항에 있어서,
상기 (IV) 프로세스에서,
상기 프로세서는, 상기 제2 CNN 모듈로 하여금, 상기 제4 특징 맵이 풀링 레이어(Pooling Layer) 및 FC 레이어(Fully-Connected Layer)를 적어도 하나를 통과하게 하여 상기 제2 로스를 산출하는 것을 특징으로 하는 장치. - 제 22 항에 있어서,
상기 풀링 레이어는 상기 제4 특징 맵의 높이 및 너비를 1로 만드는 것을 특징으로 하는 장치. - 제 16 항에 있어서,
상기 (VI) 프로세스에서,
상기 프로세서는, 상기 자동 선별기 로스를 최소화하는 방향으로 백프로파게이션을 수행하는 것을 특징으로 하는 장치. - CNN을 기반으로 유용한 학습 데이터를 취사 선별하기 위한 테스트 장치에 있어서,
(i) 학습 장치가, (i-1) 트레이닝 이미지 내의 특정 객체의 식별 정보나 위치 정보를 획득하기 위한 제1 CNN 모듈로 하여금, 상기 트레이닝 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하도록 하여 학습용 제1 특징 맵을 생성하고, (i-2) 상기 제1 CNN 모듈의 학습 프로세스에 사용될 유용한 학습 데이터를 자동 선별(Auto-Screening)하기 위한 제2 CNN 모듈로 하여금, 상기 트레이닝 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하도록 하여 학습용 제2 특징 맵을 생성하는 프로세스, 및 (ii) 상기 학습 장치가 상기 제1 CNN 모듈로 하여금 상기 학습용 제1 특징 맵을 이용해 상기 특정 객체의 상기 식별 정보나 상기 위치 정보를 나타내는 학습용 제1 출력을 생성하게 한 후, 상기 학습용 제1 출력과 이에 대응하는 GT 이미지를 참조하여 제1 로스를 산출하게 하는 프로세스, (iii) 상기 학습 장치가 상기 학습용 제1 특징 맵을 상기 제2 CNN 모듈에 입력하여, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵과 상기 학습용 제2 특징 맵의 크기를 동일하게 변경한 후, 상기 학습용 제1 특징 맵과 상기 학습용 제2 특징 맵을 통합하여, 학습용 제3 특징 맵을 생성하게 하는 프로세스, (iv) 상기 학습 장치가 상기 제2 CNN 모듈로 하여금, 상기 학습용 제3 특징 맵에 적어도 한 번 컨벌루션 연산을 적용하도록 하여 학습용 제4 특징 맵을 생성하고, 상기 학습용 제4 특징 맵을 이용해 상기 제1 로스의 예측 값에 해당하는 제2 로스를 산출하게 하는 프로세스, (v) 상기 학습 장치가 상기 제1 로스와 상기 제2 로스를 참조하여 자동 선별기 로스(Auto-Screener's Loss)를 산출하는 프로세스, 및 (vi) 상기 학습 장치가 상기 자동 선별기 로스를 이용해 백프로파게이션을 수행하여 상기 제2 CNN 모듈의 적어도 하나의 파라미터를 최적화 하는 프로세스를 수행한 상태에서, 각각의 이미지 후보를 각각의 테스트 이미지로서 획득하기 위한 통신부; 및
(I) (I-1) 제1 CNN 모듈로 하여금, 상기 테스트 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하게 하여 테스트용 제1 특징 맵을 생성하고 (I-2) 상기 제2 CNN 모듈로 하여금, 상기 테스트 이미지에 대하여 적어도 한 번 컨벌루션 연산을 적용하게 하여 테스트용 제2 특징 맵을 생성하는 프로세스; (II) 상기 테스트용 제1 특징 맵을 상기 제2 CNN 모듈에 입력하여, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵과 상기 테스트용 제2 특징 맵의 크기를 동일하게 변경한 후, 상기 테스트용 제1 특징 맵과 상기 테스트용 제2 특징 맵을 통합하여, 테스트용 제3 특징 맵을 생성하게 하는 프로세스; (III) 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제3 특징 맵에 적어도 한 번 컨벌루션 연산을 적용하도록 하여 테스트용 제4 특징 맵을 생성하고, 상기 테스트용 제4 특징 맵을 이용해 로스 예측 값을 산출하게 하는 프로세스; 및 (IV) 상기 이미지 후보 중에서 상기 로스 예측 값이 소정의 임계치 이상의 값을 갖는 적어도 하나의 이미지를 상기 제1 CNN 모듈의 학습 프로세스에 사용되는 트레이닝 이미지로 선별하는 프로세스를 수행하는 프로세서;
를 포함하는 것을 특징으로 하는 장치. - 제 25 항에 있어서,
상기 제1 CNN 모듈은 상기 특정 객체의 크기와 위치를 검출하기 위한 객체 검출 시스템, 상기 특정 객체의 종류를 식별하기 위한 분류 시스템 및 상기 특정 객체의 영역을 다른 영역과 구분하기 위한 세그멘테이션 시스템 중 하나에 포함되며,
상기 제2 CNN 모듈은 상기 트레이닝 이미지를 자동으로 선별하기 위한 자동 선별 시스템(Auto-Screening System)에 포함되되, 상기 트레이닝 이미지는 상기 제1 CNN 모듈에 입력되는 복수의 트레이닝 이미지 중에 포함되고, 상기 특정 객체에 대응하며 정확하게 검출될 확률이 낮은 특정 객체 각각을 포함하며,
상기 학습용 제1 출력은 상기 객체 검출 시스템의 출력, 상기 분류 시스템의 출력 및 상기 세그멘테이션 시스템의 출력 중 하나를 나타내고,
확률이 소정의 임계치 미만인지 여부에 대한 정보를 참조로 하여 상기 정확하게 검출될 확률이 낮은지 여부가 결정되는 것을 특징으로 하는 장치. - 제 25 항에 있어서,
상기 학습용 제2 특징 맵의 크기는 상기 학습용 제1 특징 맵보다 크고,
상기 (iii) 프로세스에서, 상기 학습 장치는 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵의 크기를 상기 학습용 제2 특징 맵 크기에 맞도록 키우게 하며,
상기 테스트용 제2 특징 맵의 크기는 상기 테스트용 제1 특징 맵보다 크고,
상기 (II) 프로세스에서, 상기 프로세서는 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵의 크기를 상기 테스트용 제2 특징 맵 크기에 맞도록 키우게 하는 것을 특징으로 하는 장치. - 제 27 항에 있어서,
상기 (iii) 프로세스에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵에 소정 횟수만큼 컨벌루션 연산을 적용하도록 하여 상기 학습용 제1 특징 맵의 크기를 상기 학습용 제2 특징 맵의 크기와 같도록 변경하게 하고,
상기 (II) 단계에서,
상기 프로세서는, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵에 소정 횟수만큼 컨벌루션 연산을 적용하도록 하여 상기 테스트용 제1 특징 맵의 크기를 상기 테스트용 제2 특징 맵의 크기와 같도록 변경하게 하는 것을 특징으로 하는 장치. - 제 25 항에 있어서,
상기 (iii) 프로세스에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제1 특징 맵과 상기 학습용 제2 특징 맵을 컨캐터네이팅하도록 하여 상기 학습용 제3 특징 맵을 생성하게 하고,
상기 (II) 프로세스에서,
상기 프로세서는, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제1 특징 맵과 상기 테스트용 제2 특징 맵을 컨캐터네이팅하도록 하여 상기 테스트용 제3 특징 맵을 생성하게 하는 것을 특징으로 하는 장치. - 제 25 항에 있어서,
상기 (iv) 프로세스에서,
상기 학습 장치는, 상기 제2 CNN 모듈로 하여금, 상기 학습용 제4 특징 맵이 풀링 레이어 및 FC 레이어 중 적어도 하나를 통과하게 하여 상기 제2 로스를 산출하고,
상기 (c) 프로세스에서,
상기 프로세서는, 상기 제2 CNN 모듈로 하여금, 상기 테스트용 제4 특징 맵이 풀링 레이어 및 FC 레이어 중 적어도 하나를 통과하게 하여 상기 로스 예측 값을 산출하는 것을 특징으로 하는 장치.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/171,755 | 2018-10-26 | ||
| US16/171,755 US10504027B1 (en) | 2018-10-26 | 2018-10-26 | CNN-based learning method, learning device for selecting useful training data and test method, test device using the same |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200047307A true KR20200047307A (ko) | 2020-05-07 |
| KR102309711B1 KR102309711B1 (ko) | 2021-10-08 |
Family
ID=67211567
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190105486A Active KR102309711B1 (ko) | 2018-10-26 | 2019-08-27 | 유용한 학습 데이터를 취사 선별하기 위한 cnn 기반 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10504027B1 (ko) |
| EP (1) | EP3644236B1 (ko) |
| JP (1) | JP6875021B2 (ko) |
| KR (1) | KR102309711B1 (ko) |
| CN (1) | CN111105011B (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023058859A1 (ko) * | 2021-10-07 | 2023-04-13 | 삼성전자 주식회사 | 디스플레이 장치 및 그 동작방법 |
| US12211172B2 (en) | 2021-10-07 | 2025-01-28 | Samsung Electronics Co., Ltd. | Display device and operating method of the same |
| KR20250109016A (ko) | 2024-01-09 | 2025-07-16 | (주)에이아이매틱스 | 데이터 스코어링 기반의 크리티컬 데이터 샘플링 방법 및 장치 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102824640B1 (ko) * | 2016-09-07 | 2025-06-25 | 삼성전자주식회사 | 뉴럴 네트워크에 기초한 인식 장치 및 뉴럴 네트워크의 트레이닝 방법 |
| US10783634B2 (en) * | 2017-11-22 | 2020-09-22 | General Electric Company | Systems and methods to deliver point of care alerts for radiological findings |
| US10799189B2 (en) | 2017-11-22 | 2020-10-13 | General Electric Company | Systems and methods to deliver point of care alerts for radiological findings |
| WO2020121678A1 (ja) * | 2018-12-14 | 2020-06-18 | 富士フイルム株式会社 | ミニバッチ学習装置とその作動プログラム、作動方法、および画像処理装置 |
| CN111666960B (zh) * | 2019-03-06 | 2024-01-19 | 南京地平线机器人技术有限公司 | 图像识别方法、装置、电子设备及可读存储介质 |
| CA3143172A1 (en) * | 2019-06-12 | 2020-12-17 | Carnegie Mellon University | Deep-learning models for image processing |
| KR102928305B1 (ko) * | 2019-07-05 | 2026-02-13 | 엘지전자 주식회사 | 머신 러닝 시스템, 방법 및 장치 |
| US11023783B2 (en) * | 2019-09-11 | 2021-06-01 | International Business Machines Corporation | Network architecture search with global optimization |
| US10943353B1 (en) | 2019-09-11 | 2021-03-09 | International Business Machines Corporation | Handling untrainable conditions in a network architecture search |
| US11334987B2 (en) * | 2019-10-09 | 2022-05-17 | Siemens Medical Solutions Usa, Inc. | Physics-constrained network and training thereof |
| JP7322965B2 (ja) * | 2019-10-28 | 2023-08-08 | 富士通株式会社 | 学習方法、学習プログラム、および学習装置 |
| KR102733834B1 (ko) * | 2019-11-19 | 2024-11-26 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| US11157813B1 (en) * | 2020-04-24 | 2021-10-26 | StradVision, Inc. | Method and device for on-vehicle active learning to be used for training perception network of autonomous vehicle |
| JP7486349B2 (ja) * | 2020-05-28 | 2024-05-17 | キヤノン株式会社 | ニューラルネットワーク、ニューラルネットワークの学習方法、プログラム、画像処理装置 |
| KR20210155179A (ko) * | 2020-06-15 | 2021-12-22 | 삼성전자주식회사 | 전자 장치 및 그 제어 방법 |
| US12131244B2 (en) | 2020-07-16 | 2024-10-29 | Google Llc | Hardware-optimized neural architecture search |
| EP4116871B1 (en) * | 2021-07-08 | 2025-08-27 | Argo AI GmbH | Method and processing unit for processing sensor data of several different sensors with an artificial neural network in a vehicle |
| EP4266260B1 (en) * | 2022-04-20 | 2026-01-07 | Axis AB | Encoding of training data for training of a neural network |
| JP2024006472A (ja) * | 2022-07-01 | 2024-01-17 | キヤノン株式会社 | 情報処理装置、学習装置、および追尾方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108596184A (zh) * | 2018-04-25 | 2018-09-28 | 清华大学深圳研究生院 | 图像语义分割模型的训练方法、可读存储介质及电子设备 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9928410B2 (en) * | 2014-11-24 | 2018-03-27 | Samsung Electronics Co., Ltd. | Method and apparatus for recognizing object, and method and apparatus for training recognizer |
| CN108475415B (zh) * | 2015-12-21 | 2022-05-27 | 商汤集团有限公司 | 用于图像处理的方法和系统 |
| US9665799B1 (en) * | 2016-01-29 | 2017-05-30 | Fotonation Limited | Convolutional neural network |
| US9471836B1 (en) * | 2016-04-01 | 2016-10-18 | Stradvision Korea, Inc. | Method for learning rejector by forming classification tree in use of training images and detecting object in test images, and rejector using the same |
| US10929977B2 (en) * | 2016-08-25 | 2021-02-23 | Intel Corporation | Coupled multi-task fully convolutional networks using multi-scale contextual information and hierarchical hyper-features for semantic image segmentation |
| US9965863B2 (en) * | 2016-08-26 | 2018-05-08 | Elekta, Inc. | System and methods for image segmentation using convolutional neural network |
| CN117095349A (zh) * | 2016-12-05 | 2023-11-21 | 摩托罗拉解决方案公司 | 外观搜索系统、方法和非暂时性计算机可读介质 |
| JP6567488B2 (ja) * | 2016-12-22 | 2019-08-28 | 日本電信電話株式会社 | 学習データ生成装置、開発データ生成装置、モデル学習装置、それらの方法、及びプログラム |
| CN108460464A (zh) * | 2017-02-22 | 2018-08-28 | 中兴通讯股份有限公司 | 深度学习训练方法及装置 |
| US10678846B2 (en) * | 2017-03-10 | 2020-06-09 | Xerox Corporation | Instance-level image retrieval with a region proposal network |
| US11068751B2 (en) * | 2017-03-21 | 2021-07-20 | Nec Corporation | Image processing device, image processing method, and storage medium |
| US10572963B1 (en) * | 2017-07-14 | 2020-02-25 | Synapse Technology Corporation | Detection of items |
| US10796200B2 (en) * | 2018-04-27 | 2020-10-06 | Intel Corporation | Training image signal processors using intermediate loss functions |
-
2018
- 2018-10-26 US US16/171,755 patent/US10504027B1/en active Active
-
2019
- 2019-07-08 EP EP19184885.2A patent/EP3644236B1/en active Active
- 2019-08-27 KR KR1020190105486A patent/KR102309711B1/ko active Active
- 2019-10-08 JP JP2019185244A patent/JP6875021B2/ja active Active
- 2019-10-22 CN CN201911007257.9A patent/CN111105011B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108596184A (zh) * | 2018-04-25 | 2018-09-28 | 清华大学深圳研究生院 | 图像语义分割模型的训练方法、可读存储介质及电子设备 |
Non-Patent Citations (1)
| Title |
|---|
| Lorenz Berger et al., "Boosted Training of Convolutional Neural Networks for Multi-Class Segmentation," arXiv:1806.05974v2 [cs.CV] (2018.07.06.)* * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023058859A1 (ko) * | 2021-10-07 | 2023-04-13 | 삼성전자 주식회사 | 디스플레이 장치 및 그 동작방법 |
| US12211172B2 (en) | 2021-10-07 | 2025-01-28 | Samsung Electronics Co., Ltd. | Display device and operating method of the same |
| KR20250109016A (ko) | 2024-01-09 | 2025-07-16 | (주)에이아이매틱스 | 데이터 스코어링 기반의 크리티컬 데이터 샘플링 방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111105011B (zh) | 2023-10-20 |
| EP3644236A1 (en) | 2020-04-29 |
| US10504027B1 (en) | 2019-12-10 |
| EP3644236B1 (en) | 2024-03-13 |
| JP6875021B2 (ja) | 2021-05-19 |
| KR102309711B1 (ko) | 2021-10-08 |
| EP3644236C0 (en) | 2024-03-13 |
| CN111105011A (zh) | 2020-05-05 |
| JP2020068028A (ja) | 2020-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200047307A (ko) | 유용한 학습 데이터를 취사 선별하기 위한 cnn 기반 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 | |
| KR102280395B1 (ko) | 차선 후보 픽셀의 분류를 통해 차선을 검출하는 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 | |
| KR102373456B1 (ko) | 자동 주차 시스템을 제공하기 위해 결정 지점 간의 관계 및 결정 지점에 대한 리그레션 결과를 이용하여 주차 공간을 검출하는 학습 방법 및 학습 장치, 그리고 이를 이용한 테스팅 방법 및 테스팅 장치 | |
| KR102263397B1 (ko) | 뉴럴 네트워크 학습에 이용될 오토 라벨링된 이미지 중에서 라벨 검수를 위한 샘플 이미지를 획득하는 방법 및 이를 이용한 샘플 이미지 획득 장치 | |
| KR102280414B1 (ko) | 고 정밀도로 이미지를 분석하기 위한 딥 러닝 네트워크를 사용하기 위해 트레이닝 이미지를 오토 라벨링하는 오토 라벨링 장치의 하이퍼파라미터를 최적화하는 방법 및 이를 이용한 최적화 장치 | |
| JP6932395B2 (ja) | イメージを分析するために、ディープラーニングネットワークに利用するためのトレーニングイメージに対するラベルリング信頼度を自動的に評価するための方法、及びこれを利用した信頼度評価装置 | |
| KR102279376B1 (ko) | CNN(Convolutional Neural Network)을 사용하여 차선을 검출하기 위한 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 | |
| JP6980289B2 (ja) | 車線モデルを利用して車線を検出し得る学習方法及び学習装置そしてこれを利用したテスト方法及びテスト装置{learning method, learning device for detecting lane using lane model and test method, test device using the same} | |
| KR102301631B1 (ko) | 협업 주행을 수행하는 자동차들로부터 획득된 주행 이미지들을 통합하는 방법 및 이를 이용한 주행 이미지 통합 장치 | |
| KR20200027428A (ko) | 에지 이미지를 이용하여 객체를 검출하는 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 | |
| KR102320985B1 (ko) | 멀티 카메라 시스템 내의 더블 임베딩 구성을 이용하여 도로 이용자 이벤트를 검출하기 위해 이용될 세그먼테이션 성능 향상을 위한 학습 방법 및 학습 장치 그리고 이를 이용한 테스팅 방법 및 테스팅 장치 | |
| CN111008626B (zh) | 基于r-cnn检测客体的方法和装置 | |
| KR20200047306A (ko) | 다른 라벨 세트를 가지는 복수의 라벨링된 데이터베이스를 이용하여 학습하는 방법 및 장치 그리고 이를 이용한 테스트 방법 및 장치 | |
| KR102337367B1 (ko) | 원거리 검출 또는 군사 목적을 위해, 이미지 컨캐터네이션을 이용한, cnn 기반의 하드웨어 최적화가 가능한 객체 검출기를 학습하는 방법 및 학습 장치, 이를 이용한 테스팅 방법 및 테스팅 장치 | |
| JP2020038663A (ja) | 障害物を検出する学習方法及び学習装置そしてこれを利用したテスト方法及びテスト装置{learning method, learning device for detecting obstacles and testing method, testing device using the same} | |
| KR20200091323A (ko) | 핵심성과지표와 같은 사용자 요구 사항에 적합한 타겟 객체 예측 네트워크를 이용한, cnn 기반의 변동에 강인한 객체 검출기를 학습하는 방법 및 학습 장치, 및 이를 이용한 테스팅 방법 및 테스팅 장치 | |
| KR102309705B1 (ko) | Cnn 기반 차선 검출을 위한 학습 방법 및 학습 장치 그리고 이를 이용한 테스트 방법 및 테스트 장치 | |
| CN115082903A (zh) | 非机动车违停识别方法、装置、计算机设备及存储介质 | |
| JP2020068015A (ja) | リグレッションロス(Regression loss)を利用した学習方法及び学習装置、そしてそれを利用したテスト方法及びテスト装置{LEARNING METHOD, LEARNING DEVICE USING REGRESSION LOSS AND TESTING METHOD, TESTING DEVICE USING THE SAME} | |
| CN116912290A (zh) | 一种记忆增强的难易视频运动小目标检测方法 | |
| CN117274740A (zh) | 一种红外目标检测方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R15-X000 | Change to inventor requested |
St.27 status event code: A-3-3-R10-R15-oth-X000 |
|
| R16-X000 | Change to inventor recorded |
St.27 status event code: A-3-3-R10-R16-oth-X000 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 5 |