KR20200049351A - 하이브리드 선박 - Google Patents
하이브리드 선박 Download PDFInfo
- Publication number
- KR20200049351A KR20200049351A KR1020180132525A KR20180132525A KR20200049351A KR 20200049351 A KR20200049351 A KR 20200049351A KR 1020180132525 A KR1020180132525 A KR 1020180132525A KR 20180132525 A KR20180132525 A KR 20180132525A KR 20200049351 A KR20200049351 A KR 20200049351A
- Authority
- KR
- South Korea
- Prior art keywords
- ship
- power
- battery
- fuel cell
- propulsion unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000000446 fuel Substances 0.000 claims abstract description 109
- 238000012360 testing method Methods 0.000 claims abstract description 22
- 238000012795 verification Methods 0.000 claims abstract description 21
- 238000010248 power generation Methods 0.000 claims description 17
- 230000033001 locomotion Effects 0.000 claims description 14
- 238000012544 monitoring process Methods 0.000 claims description 13
- 238000000034 method Methods 0.000 claims description 5
- 230000036541 health Effects 0.000 claims description 3
- 238000007689 inspection Methods 0.000 abstract 1
- 239000001257 hydrogen Substances 0.000 description 14
- 229910052739 hydrogen Inorganic materials 0.000 description 14
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 12
- 239000002828 fuel tank Substances 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 238000012423 maintenance Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 6
- 238000004422 calculation algorithm Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000013178 mathematical model Methods 0.000 description 4
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 4
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 230000005611 electricity Effects 0.000 description 3
- 239000003949 liquefied natural gas Substances 0.000 description 3
- 239000001301 oxygen Substances 0.000 description 3
- 229910052760 oxygen Inorganic materials 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- QGZKDVFQNNGYKY-UHFFFAOYSA-N Ammonia Chemical compound N QGZKDVFQNNGYKY-UHFFFAOYSA-N 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 238000003487 electrochemical reaction Methods 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 150000002431 hydrogen Chemical class 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- OTMSDBZUPAUEDD-UHFFFAOYSA-N Ethane Chemical compound CC OTMSDBZUPAUEDD-UHFFFAOYSA-N 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 238000004378 air conditioning Methods 0.000 description 1
- 239000000809 air pollutant Substances 0.000 description 1
- 231100001243 air pollutant Toxicity 0.000 description 1
- 229910021529 ammonia Inorganic materials 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000003344 environmental pollutant Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000003345 natural gas Substances 0.000 description 1
- 239000007800 oxidant agent Substances 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 231100000719 pollutant Toxicity 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/12—Use of propulsion power plant or units on vessels the vessels being motor-driven
- B63H21/17—Use of propulsion power plant or units on vessels the vessels being motor-driven by electric motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B17/00—Systems involving the use of models or simulators of said systems
- G05B17/02—Systems involving the use of models or simulators of said systems electric
-
- B63B2755/00—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H2021/003—Use of propulsion power plant or units on vessels the power plant using fuel cells for energy supply or accumulation, e.g. for buffering photovoltaic energy
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T70/00—Maritime or waterways transport
- Y02T70/50—Measures to reduce greenhouse gas emissions related to the propulsion system
- Y02T70/5218—Less carbon-intensive fuels, e.g. natural gas, biofuels
- Y02T70/5236—Renewable or hybrid-electric solutions
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/40—Application of hydrogen technology to transportation, e.g. using fuel cells
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Supply And Distribution Of Alternating Current (AREA)
- Fuel Cell (AREA)
Abstract
하이브리드 선박에서 유기적으로 연결되어 동작하는 각 시스템과 연관된 제어기들을 연동하여 통합 환경 하에서 제어 성능을 평가하는 제어 장치 검증 시스템을 구비하는 하이브리드 선박이 제공된다. 하이브리드 선박은, 선박을 작동시키는 데에 이용되는 제1 전력을 생산하는 연료 전지; 선박을 작동시키는 데에 이용되는 제2 전력을 저장하는 배터리; 제1 전력과 제2 전력 중 적어도 하나의 전력을 이용하여, 선박의 운항 계획에 따라 선박을 추진시키는 추진부; 선박을 추진시키기 위해 연료 전지, 배터리 및 추진부를 각각 제어하는 복수개의 제어 장치를 포함하는 테스트 대상 시스템, 및 각각의 제어 장치를 모의하는 시뮬레이터를 포함하며, 시뮬레이터를 이용하여 유기적으로 연결되어 동작하는 복수개의 제어 장치의 제어 성능을 검증하는 제어 장치 검증 시스템을 포함한다.
Description
본 발명은 하이브리드 발전 시스템을 구비하는 선박에 관한 것이다. 보다 상세하게는, 선박에 구비되는 제어 장치를 검증하는 시스템을 포함하는 선박에 관한 것이다.
연료 전지(fuel cell)는 연료(예를 들어, 수소, 천연가스 등)의 산화에 의해 발생되는 화학 에너지를 전기 에너지로 변환시키는 전지를 말한다. 이러한 연료 전지는 대기오염 물질을 거의 배출하지 않기 때문에, 친환경적인 에너지로 각광을 받고 있다.
선박의 전력원으로 연료 전지 시스템을 이용할 경우, 해양에서도 오염 물질을 저감시키는 것이 가능해지며, 높은 열효율로 인한 에너지 절감 효과도 얻을 수 있다. 그래서 오늘날 세계 각국에서는 친환경 선박으로 연료 전지 시스템을 이용하는 선박을 개발하는 데에 박차를 가하고 있다.
연료 전지 시스템을 전력원으로 이용하는 선박의 경우, 비상시 전력원으로 이용하기 위해, 연료 전지 시스템에 의해 생산되는 전기로 충전될 수 있는 배터리 시스템을 구비하여, 하이브리드 선박으로 구축될 수 있다.
본 발명에서 해결하고자 하는 과제는, 하이브리드 선박에서 유기적으로 연결되어 동작하는 각 시스템과 연관된 제어기들을 연동하여 통합 환경 하에서 제어 성능을 평가하는 제어 장치 검증 시스템을 구비하는 하이브리드 선박을 제공하는 것이다.
본 발명의 과제들은 이상에서 언급한 과제로 제한되지 않으며, 언급되지 않은 또 다른 과제들은 아래의 기재로부터 당업자에게 명확하게 이해될 수 있을 것이다.
상기 과제를 달성하기 위한 본 발명의 하이브리드 선박의 일 면(aspect)은, 선박을 작동시키는 데에 이용되는 제1 전력을 생산하는 연료 전지; 상기 선박을 작동시키는 데에 이용되는 제2 전력을 저장하는 배터리; 상기 제1 전력과 상기 제2 전력 중 적어도 하나의 전력을 이용하여, 상기 선박의 운항 계획에 따라 상기 선박을 추진시키는 추진부; 상기 선박을 추진시키기 위해 상기 연료 전지, 상기 배터리 및 상기 추진부를 각각 제어하는 복수개의 제어 장치를 포함하는 테스트 대상 시스템, 및 각각의 제어 장치를 모의하는 시뮬레이터를 포함하며, 상기 시뮬레이터를 이용하여 유기적으로 연결되어 동작하는 상기 복수개의 제어 장치의 제어 성능을 검증하는 제어 장치 검증 시스템을 포함한다.
상기 테스트 대상 시스템은, 상기 선박에 대한 정보를 결정하여 사용자가 명령을 입력할 수 있도록 제공되는 제어용 콘솔인 명령 콘솔; 상기 선박 내에 형성되는 배선 상에 일정 전압이 흐르도록 발전량과 전력 소비량을 제어하는 전력 관리 시스템; 상기 명령 콘솔로부터 수신된 정보와 상기 전력 관리 시스템으로부터 수신된 정보를 기초로 상기 추진부의 회전 속도와 피치 각도를 계산하는 추진부 제어 시스템; 상기 배터리를 모니터링하는 배터리 관리 시스템; 상기 연료 전지를 제어하는 연료 전지 제어 시스템; 및 선체 내에서 사용하는 에너지의 효율 개선을 위한 정보를 계산하며, 상기 에너지의 효율 개선을 위한 정보로 상기 선박의 속도, 상기 추진부의 속도, 발전량 및 상기 배터리의 사용량을 계산하는 통합 에너지 관리 시스템을 포함할 수 있다.
상기 명령 콘솔은 상기 선박에 대한 정보로 상기 선박의 속도, 선수 방향, 운전할 발전기 및 가동될 배터리와 연료 전지를 결정할 수 있다.
상기 추진부 제어 시스템은 최대로 사용 가능한 전력 소비량을 고려하여 상기 추진부의 회전 속도와 피치 각도를 계산할 수 있다.
상기 배터리 관리 시스템은 상기 배터리를 모니터링할 때 전압, 입력 전류, 출력 전류, SOC(State Of Charge) 및 SOH(State Of Health)를 모니터링하여, 잔여 에너지와 상기 배터리의 상태를 모니터링 결과로 산출할 수 있다.
상기 통합 에너지 관리 시스템은 연료의 사용량, 상기 선박의 속도, 상기 추진부의 회전 속도, 발전량 및 상기 배터리의 잔량을 기초로 상기 에너지의 효율 개선을 위한 정보를 계산할 수 있다.
상기 시뮬레이터는, 상기 선박의 전력과 관련된 제어를 수행하기 위한 전력 시뮬레이터; 상기 추진부의 회전 속도와 피치 각도를 가상으로 생성하며, 상기 추진부의 가상 회전 속도와 가상 피치 각도를 기초로 상기 추진부의 토크와 출력을 생성하는 추진부 시뮬레이터; 상기 선박의 이동 방향과 속도를 산출하는 선박 운동 시뮬레이터; 상기 배터리의 충전 전력과 방전 전력을 계산하는 배터리 시뮬레이터; 및 상기 연료 전지를 이용하여 생산 가능한 전력량, 전력 특성 및 상기 연료 전지의 효율을 계산하는 연료 전지 시뮬레이터를 포함할 수 있다.
상기 추진부 시뮬레이터는 이전 시점에 획득된 상기 추진부의 회전 속도와 피치 각도, 및 지연 시간을 기초로 현재 시점에서의 상기 가상 회전 속도와 상기 가상 피치 각도를 생성할 수 있다.
상기 선박 운동 시뮬레이터는 선체의 저항, 풍하중(wind load), 조류, 상기 추진부의 출력 토크, 및 출력 러더 각도를 기초로 상기 선박의 이동 방향과 속도를 산출할 수 있다.
상기 제어 장치 검증 시스템은 HIL(Hardware-In-the-Loop) 테스트 기법을 이용하여 상기 복수개의 제어 장치의 제어 성능을 검증할 수 있다.
기타 실시예들의 구체적인 사항들은 상세한 설명 및 도면들에 포함되어 있다.
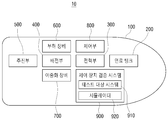
도 1은 본 발명의 일실시예에 따른 하이브리드 선박을 개략적으로 도시한 개념도이다.
도 2는 본 발명의 일실시예에 따른 하이브리드 선박의 내부 구성을 구체적으로 도시한 상세도이다.
도 3은 본 발명의 다른 실시예에 따른 하이브리드 선박을 개략적으로 도시한 개념도이다.
도 4는 제어 장치 검증 시스템에 구비되는 테스트 대상 시스템의 내부 구성을 개략적으로 도시한 블록도이다.
도 5는 제어 장치 검증 시스템에 구비되는 시뮬레이터의 내부 구성을 개략적으로 도시한 블록도이다.
도 6은 제어 장치 검증 시스템에 구비되는 테스트 대상 시스템과 시뮬레이터 사이의 동작 관계를 도시한 도면이다.
도 2는 본 발명의 일실시예에 따른 하이브리드 선박의 내부 구성을 구체적으로 도시한 상세도이다.
도 3은 본 발명의 다른 실시예에 따른 하이브리드 선박을 개략적으로 도시한 개념도이다.
도 4는 제어 장치 검증 시스템에 구비되는 테스트 대상 시스템의 내부 구성을 개략적으로 도시한 블록도이다.
도 5는 제어 장치 검증 시스템에 구비되는 시뮬레이터의 내부 구성을 개략적으로 도시한 블록도이다.
도 6은 제어 장치 검증 시스템에 구비되는 테스트 대상 시스템과 시뮬레이터 사이의 동작 관계를 도시한 도면이다.
이하, 첨부된 도면을 참조하여 본 발명의 바람직한 실시예를 상세히 설명한다. 본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 게시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 발명의 게시가 완전하도록 하고, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성요소를 지칭한다.
소자(elements) 또는 층이 다른 소자 또는 층의 "위(on)" 또는 "상(on)"으로 지칭되는 것은 다른 소자 또는 층의 바로 위 뿐만 아니라 중간에 다른 층 또는 다른 소자를 개재한 경우를 모두 포함한다. 반면, 소자가 "직접 위(directly on)" 또는 "바로 위"로 지칭되는 것은 중간에 다른 소자 또는 층을 개재하지 않은 것을 나타낸다.
공간적으로 상대적인 용어인 "아래(below)", "아래(beneath)", "하부(lower)", "위(above)", "상부(upper)" 등은 도면에 도시되어 있는 바와 같이 하나의 소자 또는 구성요소들과 다른 소자 또는 구성요소들과의 상관관계를 용이하게 기술하기 위해 사용될 수 있다. 공간적으로 상대적인 용어는 도면에 도시되어 있는 방향에 더하여 사용시 또는 동작시 소자의 서로 다른 방향을 포함하는 용어로 이해되어야 한다. 예를 들면, 도면에 도시되어 있는 소자를 뒤집을 경우, 다른 소자의 "아래(below)" 또는 "아래(beneath)"로 기술된 소자는 다른 소자의 "위(above)"에 놓여질 수 있다. 따라서, 예시적인 용어인 "아래"는 아래와 위의 방향을 모두 포함할 수 있다. 소자는 다른 방향으로도 배향될 수 있고, 이에 따라 공간적으로 상대적인 용어들은 배향에 따라 해석될 수 있다.
비록 제1, 제2 등이 다양한 소자, 구성요소 및/또는 섹션들을 서술하기 위해서 사용되나, 이들 소자, 구성요소 및/또는 섹션들은 이들 용어에 의해 제한되지 않음은 물론이다. 이들 용어들은 단지 하나의 소자, 구성요소 또는 섹션들을 다른 소자, 구성요소 또는 섹션들과 구별하기 위하여 사용하는 것이다. 따라서, 이하에서 언급되는 제1 소자, 제1 구성요소 또는 제1 섹션은 본 발명의 기술적 사상 내에서 제2 소자, 제2 구성요소 또는 제2 섹션일 수도 있음은 물론이다.
본 명세서에서 사용된 용어는 실시예들을 설명하기 위한 것이며 본 발명을 제한하고자 하는 것은 아니다. 본 명세서에서, 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다. 명세서에서 사용되는 "포함한다(comprises)" 및/또는 "포함하는(comprising)"은 언급된 구성요소, 단계, 동작 및/또는 소자는 하나 이상의 다른 구성요소, 단계, 동작 및/또는 소자의 존재 또는 추가를 배제하지 않는다.
다른 정의가 없다면, 본 명세서에서 사용되는 모든 용어(기술 및 과학적 용어를 포함)는 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 공통적으로 이해될 수 있는 의미로 사용될 수 있을 것이다. 또 일반적으로 사용되는 사전에 정의되어 있는 용어들은 명백하게 특별히 정의되어 있지 않는 한 이상적으로 또는 과도하게 해석되지 않는다.
이하, 첨부한 도면들을 참조하여 본 발명의 실시예들을 상세히 설명하기로 하며, 첨부 도면을 참조하여 설명함에 있어 도면 부호에 상관없이 동일하거나 대응하는 구성요소는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다.
도 1은 본 발명의 일실시예에 따른 하이브리드 선박을 개략적으로 도시한 개념도이다.
본 실시예에서 하이브리드 선박(hybrid ship; 10)은 복수개의 발전 시스템을 전력원으로 이용하는 선박을 말한다. 일례로 하이브리드 선박(10)은 연료 전지 시스템과 배터리 시스템을 전력원으로 이용할 수 있다. 그러나 본 실시예가 이에 한정되는 것은 아니다. 하이브리드 선박(10)은 연료 전지 시스템(fuel cell system)과 배터리 시스템(battery system) 외에 태양광 시스템을 전력원으로 더 이용하는 것도 가능하다.
도 1에 따르면, 하이브리드 선박(10)은 선체(100), 연료 탱크(200), 전력부(300), 배전부(400), 추진부(500), 부하 장비(600), 이중화 장비(700) 및 제어부(800)를 포함하여 구성될 수 있다.
연료 탱크(200)는 선체(100)의 내부에 구비되어 선체(100)에 추진력을 공급하는 데에 이용되는 연료를 저장하는 역할을 한다. 연료 탱크(200)에 저장되는 연료는 액체 연료(예를 들어, 액화 천연 가스(LNG))일 수 있으나, 본 실시예가 이에 한정되는 것은 아니다. 연료 탱크(200)에 저장되는 연료는 기체 연료(예를 들어, 수소)인 것도 가능하다.
연료 탱크(200)는 하이브리드 선박(10)에 복수개 구비될 수 있다. 연료 탱크(200)가 하이브리드 선박(10)에 복수개 구비되는 경우, 몇몇은 액체 연료(예를 들어, 액화 천연 가스)를 저장할 수 있으며, 몇몇은 기체 연료(예를 들어, 수소)를 저장할 수 있다. 그러나 본 실시예가 이에 한정되는 것은 아니다.
전력부(300)는 추진부(500), 부하 장비(600), 제어부(800) 등으로 전력을 공급하는 역할을 한다. 전력부(300)는 이를 위해 전력을 생산하거나 저장할 수 있으며, 생산 또는 저장된 전력을 추진부(500), 부하 장비(600), 제어부(800) 등으로 공급할 수 있다.
전력부(300)는 본 실시예에서 연료 전지 시스템과 배터리 시스템을 포함할 수 있다. 연료 전지 시스템은 연료 탱크(200)에서 발생된 기화 가스(BOG; Boil Off Gas)를 이용하여 제1 전력을 생산할 수 있으며, 이 제1 전력을 추진부(500), 부하 장비(600), 제어부(800) 등으로 공급할 수 있다. 그러나 본 실시예가 이에 한정되는 것은 아니다. 연료 전지 시스템은 연료 탱크(200) 또는 별도의 탱크에 저장되는 수소를 이용하여 제1 전력을 생산하는 것도 가능하다.
배터리 시스템은 제2 전력을 저장하며, 이 제2 전력을 추진부(500), 부하 장비(600), 제어부(800) 등으로 공급할 수 있다. 배터리 시스템은 연료 전지 시스템에 의해 생산되는 전력을 저장할 수 있으나, 본 실시예가 이에 한정되는 것은 아니다. 일례로 배터리 시스템은 태양광 패널(미도시)에 의해 생산되는 전력을 제2 전력으로 저장하는 것도 가능하다.
배전부(400)는 전력부(300)에 의해 공급되는 전력을 추진부(500), 부하 장비(600), 제어부(800) 등으로 전달하는 역할을 한다. 배전부(400)는 이를 위해 배선, 스위치(switch), 컨버터(converter) 등을 포함할 수 있다.
추진부(500)는 전력부(300)에 의해 공급되는 전력으로 추진력을 발생시키는 역할을 한다. 선체(100)는 이러한 추진부(500)의 추진력으로 해상에서 항해하는 것이 가능해진다.
부하 장비(600)는 평상시 선내 유지를 위한 각종 장비와 연결될 수 있도록 제공되는 것이다. 이러한 부하 장비(600)는 콘센트 형태의 것을 포함하는 장치로 구현될 수 있다. 상기에서 선내 유지를 위한 각종 장비는 선박 운항에 필요한 장비로서, 배수 설비용 펌프, 연료 공급용 펌프, 블로워(blower), 공조 장치, 전등, GPS 수신기, 레이더 장치, 선박 자동 식별 장치, 자기 나침반, 무선 설비, 선박 위치 발신 장치 등이 이에 해당될 수 있다.
부하 장비(600)는 직류 전원, 교류 전원 등을 장비에 공급하여 선내 유지가 이루어지도록 할 수 있다. 이때 부하 장비(600)는 직류 전원으로 12V DC, 24V DC 등을 장비에 공급할 수 있으며, 교류 전원으로 220V AC 등을 장비에 공급할 수 있다.
부하 장비(600)는 전력부(300)를 제어하기 위한 제어 장비(미도시)를 포함할 수 있다. 부하 장비(600)는 제어 장비로 배터리 관리 시스템(Battery Management System), 에너지 관리 시스템(Energy Management System), 전력 관리 시스템(Power Management System) 등을 포함할 수 있다.
이중화 장비(700)는 비상시 선내 유지를 위한 각종 장비와 연결될 수 있도록 제공되는 것이다. 배전부(400)의 내부에 단락, 지락 등 전력 전달 방해 요인이 발생하면, 배전부(400)가 정상적으로 동작하지 않을 수 있으며, 이로 인해 전력부(300)에 의해 공급되는 전력이 추진부(500), 부하 장비(600), 제어부(800) 등으로 올바르게 전달되지 못할 수 있다. 전력이 정상적으로 공급되지 못하여 추진부(500), 부하 장비(600), 제어부(800) 등이 올바르게 동작하지 못하는 경우, 항해 및 선내 유지가 정상적으로 이루어지지 못할 수 있다. 이중화 장비(700)는 이러한 경우 선내 유지를 위해 동작하는 필수 장비인 것으로 이해될 수 있다.
이중화 장비(700)는 전력 전달 방해 요인에 의해 부하 장비(600)가 정상적으로 작동하지 않는 경우, 부하 장비(600)를 대신하여 직류 전원, 교류 전원 등을 장비에 공급하여 선내 유지가 이루어지도록 할 수 있다. 즉, 이중화 장비(700)에 의하여 전력부(300)가 제어됨에 따라 배전부(400)의 배선 상에 문제가 발생하더라도 전력부(300)의 제어가 지속되고, 선내 유지가 수행될 수 있게 된다.
이중화 장비(700)의 동작을 위하여 전력 전달 방해 요인 발생시 배전부(400)는 이중화 장비(700)로 전력부(300)의 전력이 공급되도록 할 수 있다. 즉, 배전부(400)는 전력부(300)의 전력이 이중화 장비(700)로 전달되도록 전력 전달 경로를 형성할 수 있는 것이다.
한편 이중화 장비(700)는 부하 장비(600)가 정상적으로 작동하지 않는 경우 선내 유지를 위해 각종 장비와 연결될 수 있도록 제공되는 것도 가능하다.
한편 이중화 장비(700)는 부하 장비(600)와 마찬가지로 제어 장비를 포함할 수 있다.
제어부(800)는 전력 전달 방해 요인을 감지하고, 전력부(300) 및 배전부(400)에 구비되는 스위치를 제어하는 역할을 한다. 전력 전달 방해 요인이 감지된 경우, 제어부(800)는 전력부(300) 및 배전부(400)에 구비된 스위치를 제어하여 전력이 이중화 장비(700)로 전달되도록 할 수 있다.
제어부(800)는 부하 장비(600)와 이중화 장비(700)에 각각 포함될 수 있으며, 부하 장비(600) 및 이중화 장비(700)와 별도로 구비되는 것도 가능하다. 제어부(800)는 부하 장비(600) 및 이중화 장비(700)와 별도로 구비되는 경우, 전력부(300)를 통하여 전력을 공급받거나 별도의 전력을 공급받을 수도 있다.
이하, 도 2를 통하여 전력부(300), 배전부(400), 추진부(500), 부하 장비(600) 및 이중화 장비(700)의 세부 구성을 설명하기로 한다.
도 2는 본 발명의 일실시예에 따른 하이브리드 선박의 내부 구성을 구체적으로 도시한 상세도이다.
도 2에 따르면, 전력부(300)는 제1 배터리(311), 제2 배터리(312), 제1 연료 전지(321), 제2 연료 전지(322), 제1 DC/DC 컨버터(331), 제2 DC/DC 컨버터(332), 제3 DC/DC 컨버터(333) 및 제4 DC/DC 컨버터(334)를 포함하여 구성될 수 있다.
도 2의 예시에서는 제1 배터리(311), 제2 배터리(312) 등 두 개의 배터리 시스템이 하이브리드 선박(10)에 구축되는 것으로 도시되어 있으나, 본 실시예에서 배터리 시스템의 개수는 이에 한정되지 않는다.
마찬가지로, 제1 연료 전지(321), 제2 연료 전지(322) 등 두 개의 연료 전지 시스템이 하이브리드 선박(10)에 구축되는 것으로 도시되어 있으나, 본 실시예에서 연료 전지 시스템의 개수는 이에 한정되지 않는다.
제1 배터리(311) 및 제2 배터리(312)는 제2 전력을 저장하고, 저장된 제2 전력을 배전부(400)로 전달하는 역할을 한다. 제1 배터리(311) 및 제2 배터리(312)의 제2 전력은 각각 제1 DC/DC 컨버터(331) 및 제3 DC/DC 컨버터(333)에 의하여 전압 변환 후에 배전부(400)로 전달될 수 있다.
제1 배터리(311) 및 제2 배터리(312)는 제1 연료 전지(321) 및 제2 연료 전지(322)로부터 공급된 제1 전력을 이용하여 충전될 수 있다. 그러나 본 실시예가 이에 한정되는 것은 아니다. 제1 배터리(311) 및 제2 배터리(312)는 별도의 경로(예를 들어, 태양광 패널)를 통하여 공급되는 전력을 이용하여 충전되는 것도 가능하다.
제1 연료 전지(321) 및 제2 연료 전지(322)는 연료 탱크(200)에서 발생된 기화 가스로 제1 전력을 생산할 수 있으며, 생산된 제1 전력을 배전부(400)로 전달하는 역할을 할 수 있다. 앞서 설명한 바 있지만, 제1 연료 전지(321) 및 제2 연료 전지(322)는 연료 탱크(200) 또는 별도의 탱크에 저장되는 수소를 이용하여 제1 전력을 생산하는 것도 가능하다.
제1 연료 전지(321) 및 제2 연료 전지(322)의 제1 전력은 제2 DC/DC 컨버터(332) 및 제4 DC/DC 컨버터(334)에 의하여 전압 변환 후에 배전부(400)로 전달될 수 있다.
배전부(400)는 배전반(DC main SWBD; 410), 제1 DC/AC 컨버터(421) 및 제2 DC/AC 컨버터(422)를 포함할 수 있다.
배전반(410)은 전력부(300)의 전력이 유입되면 이를 추진부(500)와 부하 장비(600)로 공급하는 역할을 한다. 배전반(410)은 하이브리드 선박(10)에 복수개 구비될 수 있으며, 스위치를 통해 상호 연결되도록 구성될 수 있다.
제1 DC/AC 컨버터(421) 및 제2 DC/AC 컨버터(422)는 전력부(300)로부터 공급되는 직류 전력을 교류 전력으로 변환하는 역할을 한다. 제1 DC/AC 컨버터(421)는 평상시 전력부(300)로부터 공급되는 직류 전력을 교류 전력으로 변환할 수 있으며, 제2 DC/AC 컨버터(422)는 비상시 전력부(300)로부터 공급되는 직류 전력을 교류 전력으로 변환할 수 있다. 부하 장비(600) 및 이중화 장비(700)는 제1 DC/AC 컨버터(421) 및 제2 DC/AC 컨버터(422)로부터 각각 공급되는 교류 전력을 자신에 맞게 변환하여 이용할 수 있다.
배전부(400)에는 배전반(410)의 배전 스위치(411)를 중심으로 양측에 제4 스위치(SW4) 및 제5 스위치(SW5)가 구비될 수 있는데, 제4 스위치(SW4)를 통하여 부하 장비(600)로 전력이 공급될 수 있으며, 제5 스위치(SW5)를 통하여 부하 장비(600)로 전력이 공급되는 것도 가능하다.
제4 스위치(SW4)와 제5 스위치(SW5)는 인터로크(interlock) 관계를 형성한다. 따라서 제4 스위치(SW4)가 닫힘 상태(closed)가 되면, 제5 스위치(SW5)는 열림 상태(open)가 된다. 반대로 제4 스위치(SW4)가 열림 상태가 되면, 제5 스위치(SW5)는 닫힘 상태가 된다.
추진부(500)는 두 개의 추진 모터(AC motor; 510, 520)와 두 개의 DC/AC 컨버터(511, 521)를 포함할 수 있다. 추진부(500)에 구비되는 추진 모터와 DC/AC 컨버터의 개수는 한 개이거나 세 개 이상인 것도 가능하다.
제2 DC/AC 컨버터(511)와 제3 DC/AC 컨버터(521)는 배전반(410)을 통해 공급되는 직류 전력을 교류 전력으로 변환하는 역할을 한다. 그리고 추진 모터(510, 520)는 제2 DC/AC 컨버터(511)와 제3 DC/AC 컨버터(521)로부터 공급되는 교류 전력을 이용하여 추진력을 발생시키는 역할을 한다.
부하 장비(600) 및 이중화 장비(700)는 선내 유지를 위한 동작을 수행할 수 있다. 선내에는 서로 다른 전력을 이용하는 다양한 장비가 구비될 수 있다. 예를 들어, 제1 부하 장비(610), 제2 부하 장비(620) 및 제3 부하 장비(630)는 각각 직류 12V(12V DC), 직류 24V(24V DC) 및 교류 220V(220V AC)를 이용하는 장비일 수 있고, 이와 마찬가지로 제1 이중화 장비(710), 제2 이중화 장비(720) 및 제3 이중화 장비(730)는 각각 직류 12V, 직류 24V 및 교류 220V를 이용하는 장비일 수 있다. 배전부(400)로부터 공급되는 교류 전력을 직류 전력으로 변환하기 위해, 제1 부하 장비(610), 제2 부하 장비(620), 제1 이중화 장비(710) 및 제2 이중화 장비(720)에는 AC/DC 컨버터(611, 621, 711, 721)가 연결될 수 있다.
한편 도 2에서 제1 이중화 장비(710), 제2 이중화 장비(720) 및 제3 이중화 장비(730)는 제1 배터리(311), 제2 배터리(312) 등과 연결되는 것으로 도시되어 있으나, 본 실시예가 이에 한정되는 것은 아니다. 제1 이중화 장비(710), 제2 이중화 장비(720) 및 제3 이중화 장비(730)는 제1 연료 전지(321), 제2 연료 전지(322) 등과 연결되는 것도 가능하다.
한편 전력부(300)는 제1 스위치(SW1) 및 제2 스위치(SW2)를 포함할 수 있다. 제1 스위치(SW1) 및 제2 스위치(SW2)는 제4 스위치(SW4) 및 제5 스위치(SW5)의 경우와 같이 인터로크 관계를 형성하여, 열림 및 닫힘이 교차하여 수행될 수 있다. 제1 스위치(SW1) 및 제2 스위치(SW2)는 제어부(800)에 의하여 제어될 수 있다.
이상 도 1 및 도 2에서는 연료 전지 시스템과 배터리 시스템을 발전 계통으로 이용하는 하이브리드 선박(10)에 대하여 설명하였다.
하이브리드 선박(10)은 시뮬레이터(simulator)를 이용하여 하이브리드 선박(10) 내의 테스트 대상 시스템을 검증하는 제어 장치 검증 시스템을 구비할 수 있다. 이하에서는 이에 대해 설명한다.
도 3은 본 발명의 다른 실시예에 따른 하이브리드 선박을 개략적으로 도시한 개념도이다. 이하 설명은 도 3을 참조한다.
종래의 검증 시스템은 각각의 시스템을 해당 시스템 테스트용 에뮬레이터(emulator)에 연결하여 테스트를 수행하거나, 시운전 중에 제한된 조건 하에서 테스트를 수행하였다.
그러나 하이브리드 선박(10)에 구비되는 하이브리드 시스템(예를 들어, 연료 전지 시스템과 배터리 시스템)과 같이 각 시스템이 유기적으로 연결되어 동작하는 경우, 통합 환경 하에서의 제어 성능 평가가 필요하다.
제어 장치 검증 시스템(900)은 하이브리드 선박(10)에서 유기적으로 연결되어 동작하는 각 시스템과 연관된 제어기들을 연동하여 통합 환경 하에서 제어 성능을 평가할 수 있다.
제어 장치 검증 시스템(900)은 이를 위해 테스트 대상 시스템(910), 시뮬레이터(920) 등을 포함하여 구성될 수 있다.
테스트 대상 시스템(910)은 하이브리드 선박(10)에 구비되어 하이브리드 선박(10)의 각종 기능을 제어하는 복수개의 제어 장치를 포함한다. 이러한 테스트 대상 시스템(910)은 도 4에 도시된 바와 같이 명령 콘솔(911), 전력 관리 시스템(912), 추진부 제어 시스템(913), 배터리 관리 시스템(914), 연료 전지 제어 시스템(915), 통합 에너지 관리 시스템(916) 등을 포함할 수 있다. 그러나 본 실시예에서 테스트 대상 시스템(910)에 포함되는 구성이 상기의 구성에 한정되는 것은 아니다.
도 4는 제어 장치 검증 시스템에 구비되는 테스트 대상 시스템의 내부 구성을 개략적으로 도시한 블록도이다. 그리고 도 6은 제어 장치 검증 시스템에 구비되는 테스트 대상 시스템과 시뮬레이터 사이의 동작 관계를 도시한 도면이다. 이하 설명은 도 4 및 도 6을 참조한다.
명령 콘솔(911)은 하이브리드 선박(10)에 대한 정보를 결정하여 사용자가 명령을 입력할 수 있도록 제공되는 제어용 콘솔이다. 명령 콘솔(911)은 하이브리드 선박(10)에 대한 정보로 하이브리드 선박(10)의 속도, 선수 방향, 운전할 발전기, 가동될 배터리와 연료 전지 등을 결정할 수 있다.
전력 관리 시스템(912)은 추진부(500), 부하 장비(600), 이중화 장비(700) 등과 전력부(300)를 연결하는 배선(예를 들어, 배전부(400) 내에 구비되는 배선) 상의 DC BUS의 전압이 일정 레벨로 유지될 수 있도록 발전량과 전력 소비량을 제어하는 시스템이다.
전력 관리 시스템(912)은 전력 변환 장치와 스위치 보드의 동작을 제어하고 상태를 감시할 수 있다. 일례로 전력 관리 시스템(912)은 전력 변환 장치로 전력부(300)에 구비되는 DC/DC 컨버터(331, 332, 333, 334), 배전부(400)에 구비되는 DC/AC 컨버터(421, 422), 추진부(500)에 구비되는 DC/AC 컨버터(511, 521), 부하 장비(600)에 연결되는 AC/DC 컨버터(611, 621), 이중화 장비(700)에 연결되는 AC/DC 컨버터(711, 721) 등의 동작을 제어하고 상태를 감시할 수 있다. 한편 전력 관리 시스템(912)은 스위치 보드로 배전부(400)에 구비되는 배전반(410) 등의 동작을 제어하고 상태를 감시할 수 있다.
전력 관리 시스템(912)은 과도 상태 발생시 시스템이 소손되지 않도록 제어하는 역할도 수행할 수 있다.
추진부 제어 시스템(913)은 명령 콘솔(911)로부터 전달받은 정보와 전력 관리 시스템(912)으로부터 전달받은 정보를 기초로 추진부(500)의 회전 속도와 피치 각도를 계산하는 기능을 수행한다. 추진부 제어 시스템(913)은 이렇게 계산된 회전 속도와 피치 각도를 추진부(500)로 전달하여, 추진부(500)로 하여금 선체(100)의 항로를 추종하도록 할 수 있다.
추진부 제어 시스템(913)은 최대 사용 가능한 전력 소비량 내에서 추진부(500)의 회전 속도와 피치 각도를 계산하여 추진부(500)로 전달할 수 있다. 한편 추진부 제어 시스템(913)은 명령 콘솔(911)로부터 선속, 선수 방향 등을 전달받아 상기의 기능을 수행할 수 있다.
배터리 관리 시스템(914)은 배터리(예를 들어, 제1 배터리(311), 제2 배터리(312) 등)를 모니터링하며, 모니터링 결과를 산출하여 통합 에너지 관리 시스템(916)과 전력 제어 시스템(912)에 전달하는 기능을 수행한다.
배터리 관리 시스템(914)은 배터리를 모니터링할 때 배터리의 전압, 입력 전류, 출력 전류, SOC(State Of Charge), SOH(State Of Health) 등을 모니터링할 수 있다. 이러한 배터리 관리 시스템(914)은 모니터링 결과로 배터리의 잔여 에너지, 배터리의 상태 등을 산출할 수 있다.
배터리 관리 시스템(914)은 기타 온도, 알람(alarm), 폴트(fault) 등의 배터리 상태 정보를 모니터링하여 고장 유무를 알려주는 기능도 수행할 수 있다.
연료 전지 제어 시스템(915)은 연료 전지 시스템(예를 들어, 제1 연료 전지(321), 제2 연료 전지(322) 등)을 제어하는 기능을 가진 제어 시스템이다. 이러한 연료 전지 제어 시스템(915)은 하이브리드 선박(10)의 제어부(800)로부터 발전 명령을 받아서, 연료 전지로 공급되는 연료량, 공기량 등을 제어하여, 명령 내용을 수행할 수 있도록 연료 전지 시스템을 제어할 수 있다.
연료 전지 제어 시스템(915)은 일반적인 선박 운전 상태에서는 연료 전지 출력 제어(전기 발전량 제어)를 주로 담당하며, 비상시에는 연료 전지 비상 정지, 대기 모드(idle mode)로 전환하는 제어 기능 등을 수행할 수 있다.
통합 에너지 관리 시스템(916)은 선체(100) 내에서 에너지를 효율적으로 사용하기 위한 정보를 계산하는 알고리즘이 탑재되는 시스템이다.
통합 에너지 관리 시스템(916)은 에너지 효율 개선을 위해 선속, 추진부(500)의 속도, 발전량, 배터리 사용량 등을 계산할 수 있다. 이때 통합 에너지 관리 시스템(916)은 선체(100) 내 에너지의 효율적 사용을 위해 현재 연료 사용량, 선속, 추진부(500)의 회전 속도, 발전량, 배터리 잔량 등을 조합하여 상기의 기능을 수행할 수 있다.
다시 도 3을 참조하여 설명한다.
시뮬레이터(920)는 하이브리드 선박(10)에 구비되는 각종 장치의 성능을 검증하기 위해 각종 장치를 모의(simulation)하는 것이다. 시뮬레이터(920)는 도 5에 도시된 바와 같이 전력 시뮬레이터(921), 추진부 시뮬레이터(922), 선박 운동 시뮬레이터(923), 배터리 시뮬레이터(924), 연료 전지 시뮬레이터(925) 등을 포함하여 구성될 수 있다.
도 5는 제어 장치 검증 시스템에 구비되는 시뮬레이터의 내부 구성을 개략적으로 도시한 블록도이다. 이하 설명은 도 5 및 도 6을 참조한다.
전력 시뮬레이터(921)는 제어부(800)가 전력과 관련하여 적절한 제어를 수행할 수 있도록 구성되는 시뮬레이터이다.
전력 시뮬레이터(921)는 제어부(800) 테스트 수행자의 입력에 따른 전력 수요, 전력 제어 시스템, 연료 전지, 배터리 등을 조합하여 DC GRID의 전압 변동을 모사하고, 각 전력 수요와 공급처의 전압 및 전류에 대한 가상 신호를 생성하여 제어부(800)가 적절한 제어를 수행할 수 있도록 구성될 수 있다.
추진부 시뮬레이터(922)는 추진부(500)의 회전 속도와 피치 각도를 가상으로 생성하며, 가상으로 생성된 정보(추진부(500)의 가상 회전 속도와 가상 피치 각도)를 기초로 추진부(500)의 토크(torque)와 출력을 생성하여 선박 운동 시뮬레이터(923)로 전달하는 기능을 수행한다. 추진부 시뮬레이터(922)는 이를 통해 가상 선속이 업데이트되도록 제어할 수 있다.
추진부 시뮬레이터(922)는 추진부(500)의 회전 속도와 피치 각도를 가상으로 생성할 때, 추진부 제어 시스템(913)에서 전달된 추진부(500)의 이전 시점에서의 회전 속도와 피치 각도에 대한 명령 신호를 설정된 지연 시간에 따라 계산하여, 추진부(500)의 현재 시점에서의 가상 회전 속도와 가상 피치 각도를 생성할 수 있다.
또한 추진부 시뮬레이터(922)는 가상으로 생성된 정보와 선박 운동 시뮬레이터(923)에서 출력된 선속 정보를 조합하여, 추진부(500)의 현재의 토크와 출력(kW)을 생성하여 선박 운동 시뮬레이터(923)로 전달할 수 있다.
선박 운동 시뮬레이터(923)는 하이브리드 선박(10)의 이동 방향과 속도를 산출하는 시뮬레이터이다. 선박 운동 시뮬레이터(923)는 시뮬레이터 내부에 설정된 선체 저항, 풍하중(wind load), 조류, 추진부(500)의 출력 토크 등과 추진부(500) 토크, 출력 러더(rudder) 각도 등을 조합하여 하이브리드 선박(10)의 이동 방향과 속도를 산출할 수 있다.
배터리 시뮬레이터(924)는 배터리의 충전 전력, 방전 전력 등을 계산하는 모듈이다. 배터리 시뮬레이터(924)는 설정된 배터리 스택의 직렬 연결, 병렬 연결 등의 조합에 따른 DC 전압을 형성하며, 배터리 관리 시스템(914)과 전력 시뮬레이터(921)의 명령에 따라 배터리의 충전 전력, 방전 전력 등을 계산할 수 있다.
연료 전지 시뮬레이터(925)는 연료와 공기로부터 전기를 생산하는 연료 전지 시스템을 수식 계산으로 모사할 수 있게 만들어진 가상의 연료 전지 시스템 수식 모델이다. 보다 자세하게 설명하면 다음과 같다.
연료로는 수소, 산화제로는 공기를 각각 연료 전지로 공급하고, 이러한 수소 및 산소를 공급하기 위한 블로워(blower) 혹은 컴프레셔(compressor) 수식 모델을 내부에 가지고 있고, 경우에 따라서 상기 라인에 설치되는 열 교환기 등의 수식 모델을 포함한다. 실제 연료 전지에서는 공급된 수소와 산소는 전기 화학 반응에 의해서 DC 전기를 만들어내므로, 이러한 전기 화학 반응을 계산할 수 있는 수식 모델도 포함하고 있다.
상기의 전기 화학 계산식으로부터 알 수 있는 연료 전지 출력값(예를 들어, DC 전압, 전류값 등)을 결과물로 보여준다. 또한 연료 전지 스택에서 반응 후에 배출되는 미반응 연료(수소) 및 공기(산소)의 정보들, 그리고 시스템 효율을 높이기 위해서 필요시 이러한 미반응 연료 및 공기를 재사용하는 모델 및 그와 관련된 컴프레셔, 블로워, 열 교환기 등을 더 포함할 수 있다.
또한 연료 전지는 직접 수소를 연료로 공급받아 사용하는 경우 외에도, 수소를 포함한 화합물(예를 들면, 암모니아, 메탄, 에탄 등)을 연료로 사용할 수 있다. 이 경우에 상기 수소를 포함한 화합물로부터 수소를 추출해내는 개질기 모델을 더 포함할 수 있다.
상기 개질기의 운영에 필요한 각종 열 교환기, 버너, 컴프레셔, 블로워, 펌프 등도 수식으로 표현되어 시뮬레이션할 수 있다.
추가로 연료 전지를 더 효과적으로 운영하기 위한 열 관리 시스템, 수처리 시스템, 제어 시스템 등을 포함할 수도 있다.
요약하면, 연료 전지 시뮬레이터(925)는 실제 연료 전지 시스템이 가진 기능을 모사한 수식 모델이며, 이러한 수식 모델로부터 연료 및 공기 공급을 통해서 생산할 수 있는 전력량 및 전력 특성, 연료 전지 시스템의 효율, 각 세부 장치들의 특성 등을 계산을 통해서 알 수 있다.
이상 도 3 내지 도 6을 참조하여 하이브리드 선박(10)에 구비될 수 있는 제어 장치 검증 시스템(900)에 대하여 설명하였다.
제어 장치 검증 시스템(900)은 DC GRID를 가진 하이브리드 선박(10)의 추진부 제어 시스템(913), 전력 관리 시스템(912), 배터리 관리 시스템(914), 연료 전지 제어 시스템(915), 통합 에너지 관리 시스템(916) 등을 1개 이상 연동하여 테스트하기 위한 가상 환경 시뮬레이션 장치이다.
상기에서 추진부 제어 시스템(913)은 선원의 선속 명령에 따른 적정 추진기 RPM과 피치각 등을 계산하여 추진부(500)에 전달하는 알고리즘을 포함한 제어 시스템이다.
상기에서 전력 관리 시스템(912)은 배터리와 엔진 또는 연료 전지 등 선박의 발전원이 하이브리드로 구성되어 있는 선박에 대해 전력을 관리하는 시스템이다.
전력 관리 시스템(912)은 사용자로부터 명령을 입력받는 입력부(미도시), 전력 제어에 필요한 정보를 전달받는 모니터링부(미도시), 입력받은 명령과 모니터링 정보를 조합하여 제어 신호를 발생하는 제어 연산부(미도시) 등을 포함하여 구성될 수 있다.
상기에서 배터리 관리 시스템(914)은 배터리의 전압, 전류 입출력 등을 모니터링하여 배터리의 잔여 에너지를 산출하는 알고리즘을 포함한 시스템이다.
상기에서 연료 전지 제어 시스템(915)은 전력 관리 시스템(912)으로부터 제어 신호를 전달받아 연료 전지의 발전량을 조절하기 위해 연료 전지로의 수소 공급을 제어하는 알고리즘을 가진 시스템이다.
상기에서 통합 에너지 관리 시스템(916)은 선내 에너지의 효율적 사용을 위해 현재 연료 사용량과 선속, 추진부(500)의 회전 속도, 발전량, 배터리 잔량 등을 조합하여 효율 개선을 위한 선속, 추진기 속도, 발전량, 배터리 사용량 등을 계산하는 알고리즘을 가진 시스템이다.
제어 장치 검증 시스템(900)은 테스트 대상 시스템(910)와 제어부(800)를 연계시키고, 가상의 배터리 시뮬레이터(924), 전력 시뮬레이터(921), 연료 전지 시뮬레이터(925), 추진부 시뮬레이터(922), 선박 운동 시뮬레이터(923) 등을 선택적으로 조합하여 테스트를 수행할 수 있다.
시뮬레이터(920)는 실제 하이브리드 선박(10)의 동특성을 동역학적 또는 데이터 기반으로 모사하여 현재의 상태와 제어 명령에 기반한 새로운 상태가 모니터링 정보를 제어부(800)에 전달하는 시스템이다.
추진부 시뮬레이터(922)는 추진부 제어 시스템(913)에서 전달된 추진부(500)의 회전 속도와 피치 각도에 대한 명령 신호를 설정된 지연 시간에 따라 추종하여 현재의 회전 속도와 피치 각도를 선박 운동 시뮬레이터(923)와 추진부 제어 시스템(913)에 전달하며, 선박 운동 시뮬레이터(923)에서 출력된 선속 정보와 현재의 추진부(500) 회전 속도, 피치 각도에 따른 추진부(500) 부하 토크와 출력을 계산하는 모듈을 가지고 있다.
선박 운동 시뮬레이터(923)는 시뮬레이터 내부에 설정된 선체 저항과 풍하중, 조류, 추진부(500) 출력 토크 등을 조합하여 계산하여 하이브리드 선박(10)의 이동 방향과 속도를 계산하는 모듈을 가지고 있다.
배터리 시뮬레이터(924)는 설정된 배터리 스택의 직렬, 병렬 연결 조합에 따른 DC 전압을 형성하고 배터리 관리 시스템(914)과 전력 시뮬레이터(921) 명령에 따른 충전 전력/방전 전력을 계산하는 모듈을 가지고 있다.
연료 전지 시뮬레이터(925)는 가상의 연료 탱크와 가상 연료 공급/공기 공급 시스템 및 연료 전지 스택을 가지고, 연료 전지 제어 시스템(915)의 명령에 따라 가상 연료 탱크에서 가상 연료 전지 스택으로 가상 연료를 공급하고, 전달받은 가상 연료의 양과 반응율에 따라 가상 출력 전압과 가상 전류를 계산하여, 전력 시뮬레이터(921)로 전달하고, 연료 전지 제어 시스템(915)에서 요구하는 모니터링 신호에 대응하는 각 가상 시스템의 상태 정보를 전달한다.
제어 장치 검증 시스템(900)은 하이브리드 선박(10)에서 유기적으로 연결되어 동작하는 각 시스템과 연관된 제어기들을 연동하여 통합 환경 하에서 제어 성능을 평가하기 위해, HIL(Hardware-In-the-Loop) 테스트 기법을 이용하여 하이브리드 선박(10)에 구비되는 각종 제어 장치(예를 들어, 전력 관리 시스템(912), 추진부 제어 시스템(913), 배터리 관리 시스템(914), 연료 전지 제어 시스템(915), 통합 에너지 관리 시스템(916) 등)의 제어 성능을 평가할 수 있다.
이상과 첨부된 도면을 참조하여 본 발명의 실시예를 설명하였지만, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자는 본 발명이 그 기술적 사상이나 필수적인 특징을 변경하지 않고서 다른 구체적인 형태로 실시될 수 있다는 것을 이해할 수 있을 것이다. 그러므로 이상에서 기술한 실시예들은 모든 면에서 예시적인 것이며 한정적이 아닌 것으로 이해해야만 한다.
10: 하이브리드 선박
100: 선체
200: 연료 탱크 300: 전력부
311, 312: 배터리 321, 322: 연료 전지
331, 332, 333, 334: DC/DC 컨버터 400: 배전부
410: 배전반 421, 422: DC/AC 컨버터
500: 추진부 510, 520: 추진 모터
600: 부하 장비 700: 이중화 장비
611, 621, 711, 721: AC/DC 컨버터 800: 제어부
900: 제어 장치 검증 시스템 910: 테스트 대상 시스템
911: 명령 콘솔 912: 전력 관리 시스템
913: 추진부 제어 시스템 914: 배터리 관리 시스템
915: 연료 전지 제어 시스템 916: 통합 에너지 관리 시스템
920: 시뮬레이터 921: 전력 시뮬레이터
922: 추진부 시뮬레이터 923: 선박 운동 시뮬레이터
924: 배터리 시뮬레이터 925: 연료 전지 시뮬레이터
200: 연료 탱크 300: 전력부
311, 312: 배터리 321, 322: 연료 전지
331, 332, 333, 334: DC/DC 컨버터 400: 배전부
410: 배전반 421, 422: DC/AC 컨버터
500: 추진부 510, 520: 추진 모터
600: 부하 장비 700: 이중화 장비
611, 621, 711, 721: AC/DC 컨버터 800: 제어부
900: 제어 장치 검증 시스템 910: 테스트 대상 시스템
911: 명령 콘솔 912: 전력 관리 시스템
913: 추진부 제어 시스템 914: 배터리 관리 시스템
915: 연료 전지 제어 시스템 916: 통합 에너지 관리 시스템
920: 시뮬레이터 921: 전력 시뮬레이터
922: 추진부 시뮬레이터 923: 선박 운동 시뮬레이터
924: 배터리 시뮬레이터 925: 연료 전지 시뮬레이터
Claims (6)
- 선박을 작동시키는 데에 이용되는 제1 전력을 생산하는 연료 전지;
상기 선박을 작동시키는 데에 이용되는 제2 전력을 저장하는 배터리;
상기 제1 전력과 상기 제2 전력 중 적어도 하나의 전력을 이용하여, 상기 선박의 운항 계획에 따라 상기 선박을 추진시키는 추진부; 및
상기 선박을 추진시키기 위해 상기 연료 전지, 상기 배터리 및 상기 추진부를 각각 제어하는 복수개의 제어 장치를 포함하는 테스트 대상 시스템, 및 각각의 제어 장치를 모의하는 시뮬레이터를 포함하며, 상기 시뮬레이터를 이용하여 유기적으로 연결되어 동작하는 상기 복수개의 제어 장치의 제어 성능을 검증하는 제어 장치 검증 시스템을 포함하는 하이브리드 선박. - 제 1 항에 있어서,
상기 테스트 대상 시스템은,
상기 선박에 대한 정보를 결정하여 사용자가 명령을 입력할 수 있도록 제공되는 제어용 콘솔인 명령 콘솔;
상기 선박 내에 형성되는 배선 상에 일정 전압이 흐르도록 발전량과 전력 소비량을 제어하는 전력 관리 시스템;
상기 명령 콘솔로부터 수신된 정보와 상기 전력 관리 시스템으로부터 수신된 정보를 기초로 상기 추진부의 회전 속도와 피치 각도를 계산하는 추진부 제어 시스템;
상기 배터리를 모니터링하는 배터리 관리 시스템;
상기 연료 전지를 제어하는 연료 전지 제어 시스템; 및
선체 내에서 사용하는 에너지의 효율 개선을 위한 정보를 계산하며, 상기 에너지의 효율 개선을 위한 정보로 상기 선박의 속도, 상기 추진부의 속도, 발전량 및 상기 배터리의 사용량을 계산하는 통합 에너지 관리 시스템을 포함하는 하이브리드 선박. - 제 2 항에 있어서,
상기 명령 콘솔은 상기 선박에 대한 정보로 상기 선박의 속도, 선수 방향, 운전할 발전기 및 가동될 배터리와 연료 전지를 결정하고,
상기 추진부 제어 시스템은 최대로 사용 가능한 전력 소비량을 고려하여 상기 추진부의 회전 속도와 피치 각도를 계산하며,
상기 배터리 관리 시스템은 상기 배터리를 모니터링할 때 전압, 입력 전류, 출력 전류, SOC(State Of Charge) 및 SOH(State Of Health)를 모니터링하여, 잔여 에너지와 상기 배터리의 상태를 모니터링 결과로 산출하고,
상기 통합 에너지 관리 시스템은 연료의 사용량, 상기 선박의 속도, 상기 추진부의 회전 속도, 발전량 및 상기 배터리의 잔량을 기초로 상기 에너지의 효율 개선을 위한 정보를 계산하는 하이브리드 선박. - 제 1 항에 있어서,
상기 시뮬레이터는,
상기 선박의 전력과 관련된 제어를 수행하기 위한 전력 시뮬레이터;
상기 추진부의 회전 속도와 피치 각도를 가상으로 생성하며, 상기 추진부의 가상 회전 속도와 가상 피치 각도를 기초로 상기 추진부의 토크와 출력을 생성하는 추진부 시뮬레이터;
상기 선박의 이동 방향과 속도를 산출하는 선박 운동 시뮬레이터;
상기 배터리의 충전 전력과 방전 전력을 계산하는 배터리 시뮬레이터; 및
상기 연료 전지를 이용하여 생산 가능한 전력량, 전력 특성 및 상기 연료 전지의 효율을 계산하는 연료 전지 시뮬레이터를 포함하는 하이브리드 선박. - 제 4 항에 있어서,
상기 추진부 시뮬레이터는 이전 시점에 획득된 상기 추진부의 회전 속도와 피치 각도, 및 지연 시간을 기초로 현재 시점에서의 상기 가상 회전 속도와 상기 가상 피치 각도를 생성하고,
상기 선박 운동 시뮬레이터는 선체의 저항, 풍하중(wind load), 조류, 상기 추진부의 출력 토크, 및 출력 러더 각도를 기초로 상기 선박의 이동 방향과 속도를 산출하는 하이브리드 선박. - 제 1 항에 있어서,
상기 제어 장치 검증 시스템은 HIL(Hardware-In-the-Loop) 테스트 기법을 이용하여 상기 복수개의 제어 장치의 제어 성능을 검증하는 하이브리드 선박.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180132525A KR20200049351A (ko) | 2018-10-31 | 2018-10-31 | 하이브리드 선박 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180132525A KR20200049351A (ko) | 2018-10-31 | 2018-10-31 | 하이브리드 선박 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200049351A true KR20200049351A (ko) | 2020-05-08 |
Family
ID=70677909
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180132525A Withdrawn KR20200049351A (ko) | 2018-10-31 | 2018-10-31 | 하이브리드 선박 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200049351A (ko) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112238790A (zh) * | 2020-09-16 | 2021-01-19 | 中船动力研究院有限公司 | 一种船用蓄电池单元的控制方法及混合电力推进系统 |
| WO2022045410A1 (ko) * | 2020-08-24 | 2022-03-03 | 한국해양과학기술원 | 선박용 친환경 추진시스템의 해상실증 및 운용실적 확보를 위한 해상 테스트 베드 및 해상 테스트 방법 |
| WO2022045411A1 (ko) * | 2020-08-24 | 2022-03-03 | 한국해양과학기술원 | 선박용 친환경 추진시스템의 육상실증 및 운용실적 확보를 위한 육상 테스트 베드 및 육상 테스트 방법 |
| CN114394203A (zh) * | 2022-02-15 | 2022-04-26 | 云南丞泊环境治理有限公司 | 水面蓝藻作业船混合动力系统 |
| KR20220077839A (ko) * | 2020-12-02 | 2022-06-09 | 쉽 앤드 오션 인더스트리즈 알&디 센터 | 선박 전력안전 제어 시스템 및 그 작동 방법 |
| CN115140288A (zh) * | 2022-06-29 | 2022-10-04 | 上海海事大学 | 混合动力船舶的能量管理方法 |
| CN115503924A (zh) * | 2022-10-12 | 2022-12-23 | 上海中车汉格船舶与海洋工程有限公司 | 一种基于氢燃料电池混合动力船舶电力推进系统 |
| CN116280142A (zh) * | 2021-12-21 | 2023-06-23 | 纳博特斯克有限公司 | 船舶的控制装置、控制方法以及控制程序 |
| CN116331463A (zh) * | 2021-12-21 | 2023-06-27 | 纳博特斯克有限公司 | 船舶的控制装置、控制方法以及控制程序 |
| KR20240059798A (ko) * | 2022-10-27 | 2024-05-08 | 화진기업(주) | 충돌회피기능을 구비한 소형 전기추진선의 추진시스템 |
| KR102701564B1 (ko) * | 2023-11-28 | 2024-09-04 | 제이엔이시스텍(주) | 수소 연료 전지 기반 선박을 위한 통합 설계 시스템 및 이를 위한 컴퓨터 판독 가능한 저장 매체 |
| KR20250068204A (ko) * | 2023-11-09 | 2025-05-16 | 충남대학교산학협력단 | 홀트롭-매넨 기법을 활용한 역순방향 방식의 하이브리드 전기추진 선박 효율 성능 해석 시뮬레이터 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170049845A (ko) | 2015-10-29 | 2017-05-11 | 삼성중공업 주식회사 | 연료전지를 사용한 방한처리 및 보조전원 시스템을 구비한 극지 운항 선박 |
-
2018
- 2018-10-31 KR KR1020180132525A patent/KR20200049351A/ko not_active Withdrawn
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170049845A (ko) | 2015-10-29 | 2017-05-11 | 삼성중공업 주식회사 | 연료전지를 사용한 방한처리 및 보조전원 시스템을 구비한 극지 운항 선박 |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022045410A1 (ko) * | 2020-08-24 | 2022-03-03 | 한국해양과학기술원 | 선박용 친환경 추진시스템의 해상실증 및 운용실적 확보를 위한 해상 테스트 베드 및 해상 테스트 방법 |
| WO2022045411A1 (ko) * | 2020-08-24 | 2022-03-03 | 한국해양과학기술원 | 선박용 친환경 추진시스템의 육상실증 및 운용실적 확보를 위한 육상 테스트 베드 및 육상 테스트 방법 |
| JP2022549746A (ja) * | 2020-08-24 | 2022-11-29 | コリア インスティチュート オブ オーシャン サイエンス アンド テクノロジー | 船舶用環境調和型推進システムの海上実証及びトラックレコード確保のための海上テストベッド及び海上テスト方法 |
| CN112238790A (zh) * | 2020-09-16 | 2021-01-19 | 中船动力研究院有限公司 | 一种船用蓄电池单元的控制方法及混合电力推进系统 |
| CN112238790B (zh) * | 2020-09-16 | 2024-05-31 | 中船动力研究院有限公司 | 一种船用蓄电池单元的控制方法及混合电力推进系统 |
| US12214849B2 (en) | 2020-12-02 | 2025-02-04 | Ship And Ocean Industries R&D Center | Vessel power safety control system and operating method thereof |
| KR20220077839A (ko) * | 2020-12-02 | 2022-06-09 | 쉽 앤드 오션 인더스트리즈 알&디 센터 | 선박 전력안전 제어 시스템 및 그 작동 방법 |
| KR20230095003A (ko) * | 2021-12-21 | 2023-06-28 | 나부테스코 가부시키가이샤 | 선박의 제어 장치, 제어 방법 및 제어 프로그램 |
| CN116280142A (zh) * | 2021-12-21 | 2023-06-23 | 纳博特斯克有限公司 | 船舶的控制装置、控制方法以及控制程序 |
| CN116331463A (zh) * | 2021-12-21 | 2023-06-27 | 纳博特斯克有限公司 | 船舶的控制装置、控制方法以及控制程序 |
| KR20230095002A (ko) * | 2021-12-21 | 2023-06-28 | 나부테스코 가부시키가이샤 | 선박의 제어 장치, 제어 방법 및 제어 프로그램 |
| JP2023092029A (ja) * | 2021-12-21 | 2023-07-03 | ナブテスコ株式会社 | 船舶の制御装置、制御方法、及び制御プログラム |
| CN116280142B (zh) * | 2021-12-21 | 2025-12-02 | 纳博特斯克有限公司 | 船舶的控制装置、控制方法以及控制程序 |
| CN114394203A (zh) * | 2022-02-15 | 2022-04-26 | 云南丞泊环境治理有限公司 | 水面蓝藻作业船混合动力系统 |
| CN115140288B (zh) * | 2022-06-29 | 2024-04-26 | 上海海事大学 | 混合动力船舶的能量管理方法 |
| CN115140288A (zh) * | 2022-06-29 | 2022-10-04 | 上海海事大学 | 混合动力船舶的能量管理方法 |
| CN115503924A (zh) * | 2022-10-12 | 2022-12-23 | 上海中车汉格船舶与海洋工程有限公司 | 一种基于氢燃料电池混合动力船舶电力推进系统 |
| KR20240059798A (ko) * | 2022-10-27 | 2024-05-08 | 화진기업(주) | 충돌회피기능을 구비한 소형 전기추진선의 추진시스템 |
| KR20250068204A (ko) * | 2023-11-09 | 2025-05-16 | 충남대학교산학협력단 | 홀트롭-매넨 기법을 활용한 역순방향 방식의 하이브리드 전기추진 선박 효율 성능 해석 시뮬레이터 |
| KR102701564B1 (ko) * | 2023-11-28 | 2024-09-04 | 제이엔이시스텍(주) | 수소 연료 전지 기반 선박을 위한 통합 설계 시스템 및 이를 위한 컴퓨터 판독 가능한 저장 매체 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200049351A (ko) | 하이브리드 선박 | |
| KR102438842B1 (ko) | 하이브리드 선박 | |
| ES2593471T3 (es) | Sistemas de propulsión híbridos | |
| KR101918920B1 (ko) | 에너지 공급선 및 이를 이용한 에너지 공급방법 | |
| CN213689872U (zh) | 一种船用电池动力系统试验平台 | |
| TWI592335B (zh) | 船舶動力控制方法 | |
| KR102426966B1 (ko) | 하이브리드 선박 | |
| Shih et al. | Development of a small fuel cell underwater vehicle | |
| KR102426969B1 (ko) | 하이브리드 선박 | |
| Jaster et al. | Modeling and simulation of a hybrid electric propulsion system of a green ship | |
| KR20200049345A (ko) | 하이브리드 선박 | |
| US8197291B2 (en) | Method for operating a vessel | |
| Lyu et al. | Zero-emission marine vessels: Multidomain modeling and real-time hardware-in-the-loop emulation on adaptive compute acceleration platform: Zero-emission marine vessels: Modeling and real-time emulation | |
| KR101748611B1 (ko) | 선박용 리튬 배터리 충전 및 방전 제어 장치 | |
| Liu et al. | Energy management strategy for a hybrid power system for ocean engineering vessels based on an improved particle swarm optimisation algorithm | |
| Cruz et al. | Solar-Assisted Electric Boat Power and Propulsion System Simulations | |
| KR102426893B1 (ko) | 하이브리드 선박 | |
| US8554398B2 (en) | System for operating a vessel | |
| US8736100B2 (en) | Ship | |
| CN216791649U (zh) | 一种船舶动力系统试验验证平台 | |
| CN219008093U (zh) | 一种船用混合动力系统及船舶 | |
| Sorrentino et al. | Preliminary modeling of a ferry methanol fuel cell power plant by using AVL Cruise M software | |
| KR102426938B1 (ko) | 하이브리드 선박 | |
| CN114295385A (zh) | 一种船舶动力系统试验验证平台及验证方法 | |
| KR20230103224A (ko) | 선박의 배전시스템 및 배전시스템에서의 전력 분배 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181031 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |