KR20200053201A - 반송대차 시험시스템 - Google Patents
반송대차 시험시스템 Download PDFInfo
- Publication number
- KR20200053201A KR20200053201A KR1020180136516A KR20180136516A KR20200053201A KR 20200053201 A KR20200053201 A KR 20200053201A KR 1020180136516 A KR1020180136516 A KR 1020180136516A KR 20180136516 A KR20180136516 A KR 20180136516A KR 20200053201 A KR20200053201 A KR 20200053201A
- Authority
- KR
- South Korea
- Prior art keywords
- sensor
- driving
- transport cart
- transport
- cart
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/08—Railway vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0457—Storage devices mechanical with suspended load carriers
-
- H01L21/67724—
-
- H01L21/67733—
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3214—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations by means of a cart or a vehicle
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3221—Overhead conveying
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0297—Wafer cassette
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
도 2는 도 1에 도시된 시뮬레이터의 구성을 도시한 블록도이다.
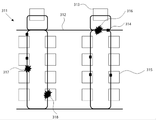
도 3은 도 2에 도시된 맵저장부에 저장된 가상주행환경맵을 설명하기 위한 예시도이다.
100: 반송대차 110: 센서부
111: 제1 센서 112 제2 센서
113: I/O보드 120: 주행휠,
130: 이적재부 131: 용기수취부
132: 벨트 133: 벨트구동부
140: 통신부 150: 제어부
200: 반송대차지그, 201: 수용공간
210: 주행대응휠 220: 피센싱물
230: 로드포트부 240: 통신부
250: 전원공급부 300: 시뮬레이터
310: 맵저장부 311: 가상주행환경맵
320: 주행제어부 330: 센싱제어부
340: 상태판단부 350: 통신부
Claims (5)
- 주행휠과 복수의 센서를 구비하는 반송대차;
상기 반송대차가 수용되는 내부공간과, 상기 반송대차의 주행휠에 대응되는 위치에 구비되어 상기 반송대차의 제자리 주행구동을 위한 주행대응휠과, 상기 반송대차의 복수의 센서 중 제1 센서를 선택적으로 감지시키는 피센싱물을 구비하는 반송대차 지그; 및
미리 저장된 가상주행환경맵에 따라 상기 반송대차를 주행구동하도록 제어하고, 상기 복수의 센서 중 제1 센서를 제외한 제2 센서를 선택적으로 감지시키기 위한 가상센서정보를 생성하고, 상기 반송대차의 주행구동에 따라 상기 반송대차지그를 제어하는 시뮬레이터를 포함하는 반송대차 시험시스템.
- 제1항에 있어서,
상기 시뮬레이터는,
상기 가상주행환경맵이 저장된 맵저장부;
상기 가상주행환경맵에 기반하여 상기 반송대차를 주행구동하도록 제어하는 주행제어부;
상기 가상주행환경맵에 기반하여, 상기 반송대차지그의 피센싱물의 구동을 제어하고, 상기 제1 센서를 선택적으로 감지시키고, 상기 복수의 센서 중 제1 센서를 제외한 제2 센서에 대한 가상센서정보를 상기 반송대차에 제공하여 상기 제2 센서를 감지된 상태로 선택적으로 변환하는 센싱제어부;
상기 반송대차 및 상기 반송대차지그와의 통신을 위한 통신부를 포함하는 것을 특징으로 하는 반송대차 시험시스템.
- 제1항에 있어서,
가상주행환경맵은, 상기 제1 센서가 감지되어야 하는 제1 이벤트발생위치와 상기 제2 센서가 감지되어야 하는 제2 이벤트발생위치를 포함하는 것을 특징으로 하는 반송대차 시험시스템.
- 제1항에 있어서,
상기 센싱제어부는,
상기 반송대차가 제1 이벤트발생위치에 도달한 경우, 상기 반송대차지그의 피센싱물을 구동하고,
상기 반송대차가 제2 이벤트발생위치에 도달한 경우, 상기 제2 센서를 감지된 상태로 변환하기 위한 상기 가상센서정보를 상기 반송대차에 제공하는 것을 특징으로 하는 반송대차 시험시스템.
- 제1항에 있어서,
상기 반송대차로부터의 상태정보를 이용하여 상기 반송대차의 상태를 판단하는 상태판단부를 더 포함하는 것을 특징으로 하는 반송대차 시험시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180136516A KR102189908B1 (ko) | 2018-11-08 | 2018-11-08 | 반송대차 시험시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180136516A KR102189908B1 (ko) | 2018-11-08 | 2018-11-08 | 반송대차 시험시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200053201A true KR20200053201A (ko) | 2020-05-18 |
| KR102189908B1 KR102189908B1 (ko) | 2020-12-15 |
Family
ID=70912824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180136516A Active KR102189908B1 (ko) | 2018-11-08 | 2018-11-08 | 반송대차 시험시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102189908B1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220003259A (ko) * | 2020-07-01 | 2022-01-10 | 세메스 주식회사 | 오버헤드 호이스트 트랜스포트 |
| KR20230103794A (ko) * | 2021-12-30 | 2023-07-07 | 세메스 주식회사 | 가상주행 시스템 및 그 제어방법 |
| WO2024088934A1 (en) * | 2022-10-26 | 2024-05-02 | Autostore Technology AS | Sensor station and method for predicting vehicle malfunction |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008101993A (ja) * | 2006-10-18 | 2008-05-01 | Hitachi Plant Technologies Ltd | 自動搬送台車の走行試験装置 |
| JP2008310467A (ja) * | 2007-06-13 | 2008-12-25 | Panasonic Corp | 搬送制御装置および搬送制御方法 |
| JP2017126286A (ja) * | 2016-01-15 | 2017-07-20 | 村田機械株式会社 | 移動体、移動体システム、および、移動体の補正係数算出方法 |
-
2018
- 2018-11-08 KR KR1020180136516A patent/KR102189908B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008101993A (ja) * | 2006-10-18 | 2008-05-01 | Hitachi Plant Technologies Ltd | 自動搬送台車の走行試験装置 |
| JP2008310467A (ja) * | 2007-06-13 | 2008-12-25 | Panasonic Corp | 搬送制御装置および搬送制御方法 |
| JP2017126286A (ja) * | 2016-01-15 | 2017-07-20 | 村田機械株式会社 | 移動体、移動体システム、および、移動体の補正係数算出方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220003259A (ko) * | 2020-07-01 | 2022-01-10 | 세메스 주식회사 | 오버헤드 호이스트 트랜스포트 |
| KR20230103794A (ko) * | 2021-12-30 | 2023-07-07 | 세메스 주식회사 | 가상주행 시스템 및 그 제어방법 |
| WO2024088934A1 (en) * | 2022-10-26 | 2024-05-02 | Autostore Technology AS | Sensor station and method for predicting vehicle malfunction |
| NO349244B1 (en) * | 2022-10-26 | 2025-11-17 | Autostore Tech As | Sensor station and malfunction prediction method for an automated vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102189908B1 (ko) | 2020-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108349079B (zh) | 有关使用光学标识符的机器人的信息通信 | |
| JP4858018B2 (ja) | 被搬送物保管システム | |
| KR102189908B1 (ko) | 반송대차 시험시스템 | |
| CN112203952B (zh) | 物品搬运车 | |
| CN111712772A (zh) | 运输车系统、运输车控制系统及运输车控制方法 | |
| JP5228469B2 (ja) | 無人搬送車を用いた混流作業ラインシステム | |
| JP2021086205A (ja) | 識別部材、自律移動装置、連結システムおよび連結方法 | |
| CN114787054A (zh) | 仓储和拣选系统以及预测和/或避免未来故障的方法 | |
| CN112119024A (zh) | 物品输送车 | |
| JP2003321106A (ja) | 商品仕分けシステム、仕分け作業管理方法および仕分け作業管理プログラム | |
| TW202509699A (zh) | 車輛控制系統 | |
| WO2021049089A1 (ja) | 管理システム及び管理システムの制御方法 | |
| JP7463863B2 (ja) | 搬送システム | |
| KR102823072B1 (ko) | 무인운반차 제어 시스템 및 이의 운영방법 | |
| KR102534402B1 (ko) | 비히클 검사 장치 및 이를 갖는 대상물 이송 시스템 | |
| US12220813B1 (en) | Calibration garage for automated calibration of depth sensors in mobile robots | |
| JP2021116145A (ja) | 仕分け設備及び走行台車の状態検査方法 | |
| JP5545183B2 (ja) | 物流搬送機器および異常検出方法 | |
| WO2025069740A1 (ja) | 物品搬送設備(article transport facility) | |
| JP2006298565A (ja) | 天井走行車システム | |
| CN118073252A (zh) | 自动行驶装置 | |
| JP2004110109A (ja) | 無人搬送システムの異常復旧制御装置及び制御方法 | |
| JP4386172B2 (ja) | 搬送システム | |
| KR20230094361A (ko) | 반송장치의 동작특성 검사방법 | |
| KR20250090077A (ko) | 이송 대차 주행 시스템 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| X091 | Application refused [patent] | ||
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T13-X000 | Administrative time limit extension granted |
St.27 status event code: U-3-3-T10-T13-oth-X000 |
|
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |