KR20200054404A - 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇 - Google Patents
기판 가압장치가 구비된 연성회로기판 자동 부착 로봇 Download PDFInfo
- Publication number
- KR20200054404A KR20200054404A KR1020180137233A KR20180137233A KR20200054404A KR 20200054404 A KR20200054404 A KR 20200054404A KR 1020180137233 A KR1020180137233 A KR 1020180137233A KR 20180137233 A KR20180137233 A KR 20180137233A KR 20200054404 A KR20200054404 A KR 20200054404A
- Authority
- KR
- South Korea
- Prior art keywords
- jig
- flexible circuit
- circuit board
- substrate
- carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K13/00—Apparatus or processes specially adapted for manufacturing or adjusting assemblages of electric components
- H05K13/0061—Tools for holding the circuit boards during processing; handling transport of printed circuit boards
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K13/00—Apparatus or processes specially adapted for manufacturing or adjusting assemblages of electric components
- H05K13/0015—Orientation; Alignment; Positioning
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K13/00—Apparatus or processes specially adapted for manufacturing or adjusting assemblages of electric components
- H05K13/04—Mounting of components, e.g. of leadless components
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Supply And Installment Of Electrical Components (AREA)
Abstract
Description
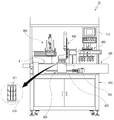
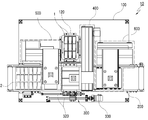
도 2는 본 발명의 일 실시예에 따른 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇의 구성을 평면에서 도시한 것이다.
도 3은 본 발명의 일 실시예에 따른 지그 이송부의 내부 구성을 보여주는 정단면도를 도시한 것이다.
도 4는 본 발명의 일 실시예에 따른 지그 이송부의 내부 구성을 보여주는 측단면도를 도시한 것이다.
도 5는 본 발명의 일 실시예에 따른 기판 적재유닛의 구성을 도시한 것이다.
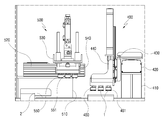
도 6는 본 발명의 일 실시예에 따른 기판 가압장치의 구성을 도시한 것이다.
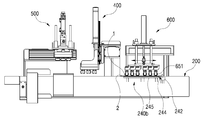
도 7 및 도 8은 본 발명의 일 실시예에 따른 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇의 작동 과정을 순차적으로 도시한 것이다.
200 : 지그 이송부 300 : 기판 정렬부
400,500 : 기판 적재유닛 600 : 기판 가압장치
Claims (8)
- 본체 테이블;
상기 본체 테이블의 상부에 구비되어, 연성회로기판이 부착되는 캐리어지그를 수평 이송하는 지그 이송부;
상기 본체 테이블의 상부에 구비되며, 연성회로기판을 픽업하여 상기 캐리어지그에 부착하는 적어도 하나의 기판 적재유닛; 및
상기 본체 테이블의 상부에 구비되며, 상기 캐리어지그에 부착된 연성회로기판을 가압하는 기판 가압장치를 포함하는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
- 제 1항에 있어서,
상기 기판 가압장치는,
상기 본체 테이블의 상부에서 상기 지그 이송부의 후단부 쪽에 수직하게 배치되는 수직프레임;
상기 지그 이송부와 평행하도록 상기 수직프레임의 상부에 연결되는 평행가이드;
상기 평행가이드를 따라 상기 지그 이송부의 상부에서 전후 방향으로 이동 가능하게 구비되는 이송부재;
상기 이송부재에 승강 가능하게 구비되는 승강부재; 및
상기 승강부재의 하부에 구비되어, 상기 캐리어지그에 적재된 상기 연성회로기판을 가압하여 부착하는 가압부재를 포함하는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
- 제 2항에 있어서,
상기 가압부재는,
상기 캐리어지그에 적재된 상기 연성회로기판을 가압하며 롤링하는 적어도 하나의 가압롤러로 이루어지는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
- 제 1항에 있어서,
상기 지그 이송부는,
상기 본체 테이블의 상부에 일 방향으로 배치되며, 상기 캐리어지그가 이송되는 지그 이송로를 형성하는 컨베이어 프레임;
상기 컨베이어 프레임의 전단부 및 후단부에 각각 회동 가능하게 구비되는 제1 및 제2 회전축;
상기 제1 및 제2 회전축의 양측 가장자리에 각각 권취되어, 상기 지그 이송로를 따라 캐리어지그를 이송하는 한 쌍의 와이어 벨트; 및
상기 제1 및 제2 회전축에 회전력을 전달하는 회전축 구동수단을 포함하는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
- 제 4항에 있어서,
상기 지그 이송부는,
상기 지그 이송로를 따라 이송되는 캐리어지그를 상기 기판 가압장치가 연성회로기판을 가압하는 기판 가압 위치에 정렬하는 지그 정렬부를 더 포함하는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
- 제 5항에 있어서,
상기 지그 정렬부는,
상기 지그 이송로 상에서 승강 가능하게 구비되어, 승강 동작에 따라 상기 캐리어지그를 상기 기판 가압 위치에 정지 또는 통과시키는 스톱퍼수단;
상기 스톱퍼수단에 의해 상기 기판 가압 위치에 정지된 상기 캐리어지그를 감지하는 지그 감지센서;
상기 지그 이송로의 하부에 배치되어, 상기 기판 가압 위치에 정지된 캐리어지그를 정렬하여 지지하는 지그 정렬판; 및
상기 지그 감지센서의 감지신호에 따라 상기 지그 정렬판을 승강시키는 승강수단을 포함하는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
- 제 6항에 있어서,
상기 지그 정렬판의 상면에는,
상기 캐리어지그를 정렬하여 고정시키기 위한 복수의 고정핀이 형성되는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
- 제 1항에 있어서,
상기 지그 이송부는,
상기 캐리어지그에 부착되는 연성회로기판의 두께를 감지하는 두께감지센서를 포함하는 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180137233A KR102159204B1 (ko) | 2018-11-09 | 2018-11-09 | 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180137233A KR102159204B1 (ko) | 2018-11-09 | 2018-11-09 | 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200054404A true KR20200054404A (ko) | 2020-05-20 |
| KR102159204B1 KR102159204B1 (ko) | 2020-09-24 |
Family
ID=70919904
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180137233A Active KR102159204B1 (ko) | 2018-11-09 | 2018-11-09 | 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102159204B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240073412A (ko) * | 2022-11-18 | 2024-05-27 | 엘지전자 주식회사 | 기판 처리 시스템, 기판 유닛 정렬 장치 및 기판 처리 방법 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102535517B1 (ko) * | 2021-04-22 | 2023-05-26 | (주)샘테크 | 기판 분리 장치 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001139170A (ja) * | 1999-11-15 | 2001-05-22 | Hitachi Via Mechanics Ltd | 板状ワーク供給装置及びこの装置を備えた板状ワーク孔明け装置 |
| JP2007165408A (ja) * | 2005-12-09 | 2007-06-28 | Nippon Mektron Ltd | フレキシブルプリント配線板の部品実装用搬送治具への位置決め方法および位置決め装置 |
| KR20090116465A (ko) * | 2008-05-07 | 2009-11-11 | 주식회사 유비셀 | 인쇄회로기판 공급시스템 |
-
2018
- 2018-11-09 KR KR1020180137233A patent/KR102159204B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001139170A (ja) * | 1999-11-15 | 2001-05-22 | Hitachi Via Mechanics Ltd | 板状ワーク供給装置及びこの装置を備えた板状ワーク孔明け装置 |
| JP2007165408A (ja) * | 2005-12-09 | 2007-06-28 | Nippon Mektron Ltd | フレキシブルプリント配線板の部品実装用搬送治具への位置決め方法および位置決め装置 |
| KR20090116465A (ko) * | 2008-05-07 | 2009-11-11 | 주식회사 유비셀 | 인쇄회로기판 공급시스템 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240073412A (ko) * | 2022-11-18 | 2024-05-27 | 엘지전자 주식회사 | 기판 처리 시스템, 기판 유닛 정렬 장치 및 기판 처리 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102159204B1 (ko) | 2020-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI583606B (zh) | 基板固定裝置、基板作業裝置、及基板固定方法 | |
| CN108323016B (zh) | Fpc软板自动加工设备 | |
| JP5003350B2 (ja) | 電子部品実装装置および電子部品実装方法 | |
| JP4957453B2 (ja) | 電子部品実装システムおよび電子部品実装方法 | |
| CN111843480A (zh) | Led显示屏底壳装配设备及其生产工艺 | |
| KR101933298B1 (ko) | 접착필름용 접착시트 부착장치 | |
| JP4950831B2 (ja) | 基板搬送コンベヤ | |
| KR100339499B1 (ko) | 인쇄회로기판 제조 공정의 로더 장치 및 그 방법 | |
| KR102159204B1 (ko) | 기판 가압장치가 구비된 연성회로기판 자동 부착 로봇 | |
| KR101566927B1 (ko) | 부품실장기의 컨베이어장치 | |
| KR101968313B1 (ko) | 연성회로기판 자동 부착 로봇 및 이를 이용한 연성회로기판 자동 부착 방법 | |
| JP4832244B2 (ja) | プリント基板上への所定作業方法及び所定作業装置 | |
| WO2020152766A1 (ja) | 搬送装置 | |
| KR20180132410A (ko) | Pcb 보드의 형태에 따라 센서의 위치를 조정할 수 있는 smt 장비의 언로더 장치 | |
| JP7133041B2 (ja) | 搬送装置 | |
| JP5103814B2 (ja) | ワーク搬送装置 | |
| JP3664589B2 (ja) | 基板搬送装置および基板搬送方法 | |
| CN119429685B (zh) | 上料设备 | |
| CN224118212U (zh) | 一种电路板分流装置 | |
| TWI534442B (zh) | Electronic components operating equipment and its application of the test classification equipment | |
| CN111942860A (zh) | 一种全自动烧录系统及烧录方法 | |
| JP6792631B2 (ja) | 基板作業装置 | |
| JP7385534B2 (ja) | 搬送装置、基板処理装置 | |
| KR100896456B1 (ko) | 인쇄회로기판의 자동 공급 반출 장치 | |
| CN121756073A (zh) | 组装设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181109 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200217 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| PG1501 | Laying open of application | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20200818 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20200217 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20200818 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20200413 Comment text: Amendment to Specification, etc. |
|
| PX0701 | Decision of registration after re-examination |
Patent event date: 20200902 Comment text: Decision to Grant Registration Patent event code: PX07013S01D Patent event date: 20200828 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I Patent event date: 20200818 Comment text: Decision to Refuse Application Patent event code: PX07011S01I Patent event date: 20200413 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20200917 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20200917 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20240715 Start annual number: 5 End annual number: 5 |