KR20200055239A - 로봇군 제어 방법 및 시스템 - Google Patents
로봇군 제어 방법 및 시스템 Download PDFInfo
- Publication number
- KR20200055239A KR20200055239A KR1020180138613A KR20180138613A KR20200055239A KR 20200055239 A KR20200055239 A KR 20200055239A KR 1020180138613 A KR1020180138613 A KR 1020180138613A KR 20180138613 A KR20180138613 A KR 20180138613A KR 20200055239 A KR20200055239 A KR 20200055239A
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- work
- sub
- work area
- map information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1669—Program controls characterised by programming, planning systems for manipulators characterised by special application, e.g. multi-arm co-operation, assembly, grasping
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Mathematical Physics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- General Physics & Mathematics (AREA)
- Manipulator (AREA)
Abstract
본 발명에서는, 관리 로봇이 주행하면서 작업 영역에 대한 지도 정보를 생성하는 지도 정보 생성 단계; 상기 작업 영역에서 하나 이상의 서브 작업 영역을 분할하여 하나 이상의 작업 로봇에게 할당하는 서브 작업 영역 할당 단계; 및 상기 하나 이상의 작업 로봇이 상기 하나 이상의 서브 작업 영역에서 각각 작업을 수행하도록 제어하는 작업 수행 단계;를 포함하는 것을 특징으로 하는 로봇군 제어 방법을 개시한다.
Description
도 1은 본 발명의 일 실시예에 따른 로봇군 제어 방법의 순서도이다.
도 2는 본 발명의 일 실시예에 따른 로봇군 제어 시스템의 구성도이다.
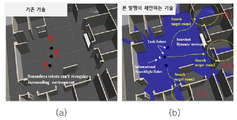
도 3은 본 발명의 일 실시예에 따른 로봇군 제어 방법 및 시스템의 동작을 설명하는 도면이다.
도 4는 본 발명의 일 실시예에 따른 로봇군 제어 방법 및 시스템에서 관리 로봇과 작업 로봇 간의 정보 전송을 설명하는 도면이다.
도 5 내지 도 9는 본 발명의 일 실시예에 따른 로봇군 제어 방법 및 시스템에서 서브 작업 영역의 산출을 설명하는 도면이다.
도 10은 본 발명의 일 실시예에 따른 로봇군 제어 방법 및 시스템에서 관리 로봇의 위치를 기준으로 작업 로봇의 위치를 제어하는 방법을 설명하는 도면이다.
도 11은 본 발명의 일 실시예에 따른 로봇군 제어 방법 및 시스템에서 관리 로봇과 작업 로봇의 동작을 설명하는 도면이다.
도 12는 본 발명의 일 실시예에 따른 로봇군 제어 방법 및 시스템에서 적외선 영상에서 객체를 산출하는 알고리즘을 설명하는 도면이다.




100 : 관리 로봇
200 : 작업 로봇
Claims (12)
- 관리 로봇이 주행하면서 작업 영역에 대한 지도 정보를 생성하는 지도 정보 생성 단계;
상기 작업 영역에서 하나 이상의 서브 작업 영역을 분할하여 하나 이상의 작업 로봇에게 할당하는 서브 작업 영역 할당 단계; 및
상기 하나 이상의 작업 로봇이 상기 하나 이상의 서브 작업 영역에서 각각 작업을 수행하도록 제어하는 작업 수행 단계;
를 포함하는 것을 특징으로 하는 로봇군 제어 방법. - 제1항에 있어서,
상기 지도 정보 생성 단계에서,
상기 관리 로봇은 객체 감지 및 거리 측정 센서를 구비하여 상기 지도 정보를 생성하며,
상기 작업 수행 단계에서,
상기 작업 로봇은 상기 생성된 지도 정보를 이용하여 객체 감지 및 거리 측정 센서를 사용하지 않고 상기 서브 작업 영역을 주행하며 작업을 수행하는 것을 특징으로 하는 로봇군 제어 방법. - 제2항에 있어서,
상기 작업 수행 단계에서,
상기 작업 로봇은 영상 카메라를 구비하여 주변에 대한 영상 정보를 생성하고,
상기 영상 정보와 상기 지도 정보를 이용하여 상기 작업 영역에서의 자신의 위치 정보를 산출하여 작업을 수행하는 것을 특징으로 하는 로봇군 제어 방법. - 제3항에 있어서,
상기 관리 로봇은,
자신의 위치를 기준으로 산출되는 상기 작업 로봇의 상대적인 위치 정보를 이용하여 상기 작업 로봇의 위치 정보를 제어하는 것을 특징으로 하는 로봇군 제어 방법. - 제1항에 있어서,
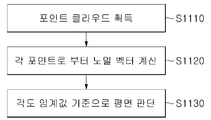
상기 서브 작업 영역 할당 단계는,
상기 작업 영역의 특정 영역에 대하여 수집된 입체 점군(3D point cloud) 중 상기 작업 공간의 벽면에서 이탈하는 이탈 점군을 산정하고,
상기 이탈 점군의 숫자에 따라 상기 특정 영역을 서브 작업 영역으로 산출할 것인지 여부를 판단하는 것을 특징으로 하는 로봇군 제어 방법. - 제5항에 있어서,
상기 서브 작업 영역 할당 단계는,
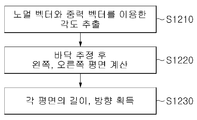
상기 작업 영역의 특정 영역에 대하여 수집된 입체 점군(3D point cloud)을 투영하여 상기 특정 영역의 벽면에 대한 평면(2D) 벡터를 산출하는 단계;
상기 평면(2D) 벡터로부터 상기 특정 영역의 벽면을 산출하는 단계; 및
상기 입체 점군 중 상기 특정 영역의 벽면에서 이탈하는 이탈 점군을 산정하는 단계;를 포함하는 것을 특징으로 하는 로봇군 제어 방법. - 제5항에 있어서,
상기 서브 작업 영역 할당 단계에서는,
상기 이탈 점군의 숫자가 미리 정해진 잡음 기준치보다 작거나 같은 경우에는 상기 이탈 점군을 잡음으로 판단하고,
상기 이탈 점군의 숫자가 미리 정해진 잡음 기준치보다 큰 경우에는 상기 이탈 점군을 객체로 판단하는 것을 특징으로 하는 로봇군 제어 방법. - 제1항에 있어서,
상기 작업 수행 단계에서,
상기 작업 로봇은 적외선 센서(IR sensor)를 사용하여 생성된 적외선 영상을 이용해 상기 서브 작업 영역을 인식하여 작업을 수행하는 것을 특징으로 하는 로봇군 제어 방법. - 제8항에 있어서,
상기 작업 수행 단계는,
(a) 상기 작업 로봇이 상기 적외선 영상의 히스토그램(histogram)을 정규화하는 단계;
(b) 상기 적외선 영상에 모폴로지 연산-침식(erosion)-과 가우시안 필터링-블러(blur)-을 적용하는 단계;
(c) 상기 적외선 영상을 이진화(binarization)하는 단계; 및
(d) 상기 적외선 영상에 대하여 레이블링(blob labeling)을 수행하는 단계;를 포함하는 것을 특징으로 하는 로봇군 제어 방법. - 제1항에 있어서,
상기 지도 정보 생성 단계에서,
상기 관리 로봇은 영상 카메라와 객체 감지 및 거리 측정 센서를 구비하여,
상기 영상 카메라의 영상 데이터를 통해 판단되는 조도가 미리 정해진 조도 기준치에 미치지 못하는 경우,
상기 객체 감지 및 거리 측정 센서를 사용하여 상기 지도 정보를 생성하는 것을 특징으로 하는 로봇군 제어 방법. - 관리 로봇과 하나 이상의 작업 로봇을 포함하는 로봇군에 대한 제어 시스템에 있어서,
주행하면서 작업 영역에 대한 지도 정보를 생성하고, 상기 작업 영역에서 하나 이상의 서브 작업 영역을 분할하여 하나 이상의 작업 로봇에게 할당하는 관리 로봇; 및
상기 할당받은 하나 이상의 서브 작업 영역에서 작업을 수행하는 작업 로봇;
을 포함하는 것을 특징으로 하는 로봇군 제어 시스템. - 제11항에 있어서,
상기 관리 로봇은 객체 감지 및 거리 측정 센서를 구비하여 상기 지도 정보를 생성하며,
상기 작업 로봇은 상기 생성된 지도 정보를 이용하여 객체 감지 및 거리 측정 센서를 사용하지 않고 상기 서브 작업 영역을 주행하며 작업을 수행하는 것을 특징으로 하는 로봇군 제어 시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180138613A KR102257746B1 (ko) | 2018-11-13 | 2018-11-13 | 로봇군 제어 방법 및 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180138613A KR102257746B1 (ko) | 2018-11-13 | 2018-11-13 | 로봇군 제어 방법 및 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200055239A true KR20200055239A (ko) | 2020-05-21 |
| KR102257746B1 KR102257746B1 (ko) | 2021-05-31 |
Family
ID=70910651
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180138613A Active KR102257746B1 (ko) | 2018-11-13 | 2018-11-13 | 로봇군 제어 방법 및 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102257746B1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112967559A (zh) * | 2021-03-29 | 2021-06-15 | 北京航空航天大学 | 一种基于虚拟装配环境的装配技能直接生成方法 |
| WO2021256735A1 (ko) * | 2020-06-15 | 2021-12-23 | 삼성전자 주식회사 | 전자 장치 및 그 동작방법 |
| WO2022004999A1 (en) | 2020-07-03 | 2022-01-06 | Samsung Electronics Co., Ltd. | Electronic device for recognizing object and operating method thereof |
| KR102405955B1 (ko) * | 2020-12-29 | 2022-06-08 | 현대위아 주식회사 | 다수의 모바일 로봇 경로 분석 시스템 및 방법 |
| WO2023068542A1 (ko) * | 2021-10-21 | 2023-04-27 | 한국전자통신연구원 | 모바일 로봇의 전역 위치인식을 위한 방법 및 컴퓨팅 장치 |
| KR20230057944A (ko) * | 2021-10-21 | 2023-05-02 | 한국전자통신연구원 | 모바일 로봇의 전역 위치인식을 위한 방법 및 컴퓨팅 장치 |
| CN116038710A (zh) * | 2023-02-03 | 2023-05-02 | 珠海一微半导体股份有限公司 | 一种绘画机器人确定工作区域的方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20250001483A (ko) * | 2023-06-27 | 2025-01-07 | 삼성전자주식회사 | 맵을 생성하기 위한 전자 장치 및 이의 제어 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4043289B2 (ja) * | 2002-05-27 | 2008-02-06 | シャープ株式会社 | 探索ロボットシステム |
| KR101697857B1 (ko) * | 2015-04-08 | 2017-01-18 | 엘지전자 주식회사 | 이동 로봇 및 그의 위치인식방법 |
| KR20180039438A (ko) | 2016-10-10 | 2018-04-18 | 엘지전자 주식회사 | 공항용 안내 로봇 및 그의 동작 방법 |
| KR20180044486A (ko) * | 2016-10-21 | 2018-05-03 | 네이버 주식회사 | 자율 주행 기술을 응용한 3차원 실내 정밀 지도 자동 생성 로봇 및 로봇의 제어 방법 |
-
2018
- 2018-11-13 KR KR1020180138613A patent/KR102257746B1/ko active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4043289B2 (ja) * | 2002-05-27 | 2008-02-06 | シャープ株式会社 | 探索ロボットシステム |
| KR101697857B1 (ko) * | 2015-04-08 | 2017-01-18 | 엘지전자 주식회사 | 이동 로봇 및 그의 위치인식방법 |
| KR20180039438A (ko) | 2016-10-10 | 2018-04-18 | 엘지전자 주식회사 | 공항용 안내 로봇 및 그의 동작 방법 |
| KR20180044486A (ko) * | 2016-10-21 | 2018-05-03 | 네이버 주식회사 | 자율 주행 기술을 응용한 3차원 실내 정밀 지도 자동 생성 로봇 및 로봇의 제어 방법 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021256735A1 (ko) * | 2020-06-15 | 2021-12-23 | 삼성전자 주식회사 | 전자 장치 및 그 동작방법 |
| US12450877B2 (en) | 2020-06-15 | 2025-10-21 | Samsung Electronics Co., Ltd. | Electronic device assigning recognition model to computing unit and operating method thereof |
| WO2022004999A1 (en) | 2020-07-03 | 2022-01-06 | Samsung Electronics Co., Ltd. | Electronic device for recognizing object and operating method thereof |
| EP4115390A4 (en) * | 2020-07-03 | 2023-08-30 | Samsung Electronics Co., Ltd. | ELECTRONIC DEVICE FOR OBJECT RECOGNITION AND OPERATING METHOD THEREOF |
| US12154337B2 (en) | 2020-07-03 | 2024-11-26 | Samsung Electronics Co., Ltd. | Electronic device for recognizing object and operating method thereof |
| KR102405955B1 (ko) * | 2020-12-29 | 2022-06-08 | 현대위아 주식회사 | 다수의 모바일 로봇 경로 분석 시스템 및 방법 |
| CN112967559A (zh) * | 2021-03-29 | 2021-06-15 | 北京航空航天大学 | 一种基于虚拟装配环境的装配技能直接生成方法 |
| CN112967559B (zh) * | 2021-03-29 | 2021-12-28 | 北京航空航天大学 | 一种基于虚拟装配环境的装配技能直接生成方法 |
| WO2023068542A1 (ko) * | 2021-10-21 | 2023-04-27 | 한국전자통신연구원 | 모바일 로봇의 전역 위치인식을 위한 방법 및 컴퓨팅 장치 |
| KR20230057944A (ko) * | 2021-10-21 | 2023-05-02 | 한국전자통신연구원 | 모바일 로봇의 전역 위치인식을 위한 방법 및 컴퓨팅 장치 |
| CN116038710A (zh) * | 2023-02-03 | 2023-05-02 | 珠海一微半导体股份有限公司 | 一种绘画机器人确定工作区域的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102257746B1 (ko) | 2021-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102257746B1 (ko) | 로봇군 제어 방법 및 시스템 | |
| US12008778B2 (en) | Information processing apparatus, control method for same, non-transitory computer-readable storage medium, and vehicle driving support system | |
| US11657595B1 (en) | Detecting and locating actors in scenes based on degraded or supersaturated depth data | |
| Palazzolo et al. | ReFusion: 3D reconstruction in dynamic environments for RGB-D cameras exploiting residuals | |
| KR102472767B1 (ko) | 신뢰도에 기초하여 깊이 맵을 산출하는 방법 및 장치 | |
| US12175699B2 (en) | Confidence determination of 3D point cloud data acquired by LIDAR sensor | |
| US10165246B2 (en) | Method and device for processing stereoscopic data | |
| US11703334B2 (en) | Mobile robots to generate reference maps for localization | |
| JP2018522348A (ja) | センサーの3次元姿勢を推定する方法及びシステム | |
| CN113821033B (zh) | 一种无人车路径规划方法、系统及终端 | |
| JP6817742B2 (ja) | 情報処理装置およびその制御方法 | |
| CN112013858A (zh) | 定位方法、装置、自移动设备和存储介质 | |
| JP6997057B2 (ja) | 不動物体情報から端末位置を推定する装置、プログラム及び方法 | |
| CN117611809A (zh) | 基于相机激光雷达融合的点云动态物体滤除方法 | |
| WO2020046203A1 (en) | Device and method for tracking human subjects | |
| CN112184765A (zh) | 一种基于视觉的水下航行器自主跟踪方法 | |
| US20230376106A1 (en) | Depth information based pose determination for mobile platforms, and associated systems and methods | |
| CN112907661A (zh) | 一种移动目标定位方法、装置、电子设备、系统及介质 | |
| CN110207702A (zh) | 目标定位的方法及装置 | |
| US12299906B2 (en) | Estimating the movement of an image position | |
| Hernández et al. | Stairway detection based on single camera by motion stereo | |
| CN119183553A (zh) | 用于确定从预先给定观察点可见或不可见的点群的方法 | |
| CN113327244B (zh) | 一种基于计算机视觉的手柄控制器led灯定位方法和系统 | |
| Mehltretter et al. | Multimodal dense stereo matching | |
| KR20240015464A (ko) | 소실점을 이용한 특징선 기반 slam 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |