KR20200055600A - 가시광선 레이저와 근적외선 펄스 레이저를 이용한 거리 측정 장치 및 측정 방법 - Google Patents
가시광선 레이저와 근적외선 펄스 레이저를 이용한 거리 측정 장치 및 측정 방법 Download PDFInfo
- Publication number
- KR20200055600A KR20200055600A KR1020180139418A KR20180139418A KR20200055600A KR 20200055600 A KR20200055600 A KR 20200055600A KR 1020180139418 A KR1020180139418 A KR 1020180139418A KR 20180139418 A KR20180139418 A KR 20180139418A KR 20200055600 A KR20200055600 A KR 20200055600A
- Authority
- KR
- South Korea
- Prior art keywords
- laser
- visible light
- infrared
- optical system
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
- G01S7/4815—Constructional features, e.g. arrangements of optical elements of transmitters alone using multiple transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/484—Transmitters
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/10—Beam splitting or combining systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Optics & Photonics (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
n = [~D/NAR] (1)
D = n x NAR + d (2)
Description
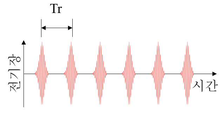
도 2는 근적외선 레이저 펄스의 시간에 따른 전기장의 세기를 나타낸 그래프이다.
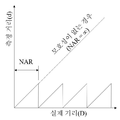
도 3은 모호성의 유무에 따른 실제 거리와 측정 거리의 관계를 나타낸 그래프이다.
도 4는 고정밀 접힌 거리 값을 설명하기 위하여 나타낸 그래프이다.
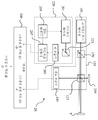
도 5는 본 발명의 제2 실시예에 따른 거리 측정 장치의 광학계를 도시한 구성도이다.
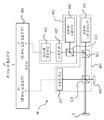
도 6은 본 발명의 제3 실시예에 따른 거리 측정 장치의 광학계를 도시한 구성도이다.
도 7은 본 발명의 제4 실시예에 따른 거리 측정 장치의 광학계를 도시한 구성도이다.
110, 120, 130, 140: 근적외선 레이저 광학계
210, 220, 230, 240: 가시광선 레이저 광학계
101: 근적외선 펄스 레이저 105: 신호 검출부
113: 제1 광 커플러 123: 제2 광 분할기
160: 제2 광 커플러 170: 제1 광 분할기
201: 가시광선 레이저 203: 함수 발생기
205: 광 검출기 207: 지연시간 검출기
209: 기준면 미러 213: 제3 광 커플러
223: 제3 광 분할기 226: 간섭신호 분석기
300: 연산부 T: 측정 대상
Claims (14)
- 측정 대상으로 레이저 광을 조사하여 반사된 광을 수광함으로써 상기 측정 대상까지의 거리를 측정하는 장치에 있어서,
근적외선 레이저 펄스를 생성하여 상기 측정 대상을 향해 방출하고, 상기 측정 대상으로부터 반사된 근적외선 레이저 펄스를 수광하여 근적외선 전기적 신호로 변환하는 근적외선 레이저 광학계;
가시광선 레이저 광을 생성하여 상기 측정 대상을 향해 방출하고, 상기 측정 대상으로부터 반사된 가시광선 레이저 광을 수광하여 가시광선 전기적 신호로 변환하는 가시광선 레이저 광학계; 및
상기 가시광선 레이저 광학계로부터 상기 가시광선 전기적 신호를 제공받아 제1 정밀도 거리 값 ~D를 구하고 하기 식(1)에 따라 정수 n을 계산하며, 상기 근적외선 레이저 광학계로부터 상기 근적외선 전기적 신호를 제공받아 상기 제1 정밀도보다 높은 제2 정밀도 거리 값 d를 구하고 하기 식(2)에 따라 실제 거리 D를 산출하는 연산부
를 포함하는 거리 측정 장치.
n = [~D/NAR] (1)
D = n x NAR + d (2)
(여기서, [ ] 은 가우스 함수이고, ~D는 가시광선 레이저 광학계에서 측정된 거리, NAR은 근적외선 레이저 광학계의 비모호성 범위(Non-Ambiguity Range) 상수, D는 실제 거리, 그리고 d는 근적외선 레이저 광학계에서 측정된 거리임) - 제 1 항에 있어서,
상기 근적외선 레이저 광학계는,
상기 근적외선 레이저 펄스를 생성하여 방출하는 근적외선 펄스 레이저;
상기 방출된 근적외선 레이저 펄스를 통과시키고, 상기 반사된 근적외선 레이저 펄스를 수광하여 광 경로를 변경시키는 제1 광 커플러;
상기 반사된 근적외선 레이저 펄스를 수광하여 상기 근적외선 전기적 신호를 생성하고 상기 연산부로 전달하는 신호 검출부
를 포함하는, 거리 측정 장치. - 제 1 항에 있어서,
상기 근적외선 레이저 광학계로부터 방출되는 근적외선 레이저 펄스와 상기 가시광선 레이저 광학계로부터 방출되는 가시광선 레이저 광을 결합하여 상기 측정 대상으로 조사하고, 상기 측정 대상으로부터 반사되는 광을 수광하여 상기 근적외선 레이저 펄스와 상기 가시광선 레이저 광으로 분리하여 전송하는 제2 광 커플러를 더 포함하는 거리 측정 장치. - 제 1 항에 있어서,
상기 가시광선 레이저 광학계는,
상기 가시광선 레이저 광을 생성하여 방출하는 가시광선 레이저;
상기 방출된 가시광선 레이저 광을 통과시키고, 상기 반사된 가시광선 레이저 광을 수광하여 광 경로를 변경시키는 제3 광 커플러;
상기 제3 광 커플러로부터 전송된 상기 반사된 가시광선 레이저 광을 수광하여 상기 가시광선 전기적 신호를 생성하는 광 검출기;
미리 설정된 전기적 신호 파형을 생성하여 상기 가시광선 레이저에 제공하는 함수 발생기; 및
상기 광 검출기로부터 상기 가시광선 전기적 신호를 전달받고, 상기 함수 발생기로부터 상기 전기적 신호 파형 또는 그 생성 시점을 전달받아서 상기 가시광선 전기적 신호의 지연된 시간을 산출하여 상기 연산부로 전달하는 지연시간 검출기
를 포함하는, 거리 측정 장치. - 제 1 항에 있어서,
상기 근적외선 레이저 광학계에서 방출되는 상기 근적외선 레이저 펄스는 통과시키고 상기 가시광선 레이저 광학계에서 방출되는 상기 가시광선 레이저 광은 반사시키는 제1 광 분할기를 더 포함하는 거리 측정 장치. - 제 1 항에 있어서,
상기 근적외선 레이저 광학계는,
상기 근적외선 레이저 펄스를 생성하여 방출하는 근적외선 펄스 레이저;
상기 방출된 근적외선 레이저 펄스의 일부를 반사시켜 기준면 미러로 전달하고 다른 일부를 통과시켜 상기 측정 대상으로 조사하며, 상기 측정 대상으로부터 반사된 근적외선 레이저 펄스를 수광하여 광 경로를 변경시키는 제2 광 분할기;
상기 측정 대상으로부터 반사된 근적외선 레이저 펄스와 상기 기준면 미러로부터 반사된 근적외선 레이저 펄스를 수광하여 상기 근적외선 전기적 신호를 생성하여 상기 연산부로 전달하는 신호 검출부
를 포함하는, 거리 측정 장치. - 제 1 항에 있어서,
상기 가시광선 레이저 광학계는,
상기 가시광선 레이저 광을 생성하여 방출하는 가시광선 레이저;
상기 방출된 가시광선 레이저 광을 반사시키고, 상기 반사된 가시광선 레이저 광을 통과시키는 제3 광 분할기;
상기 제3 광 분할기로부터 전송된 상기 반사된 가시광선 레이저 광을 수광하여 상기 가시광선 전기적 신호를 생성하는 광 검출기;
미리 설정된 전기적 신호 파형을 생성하여 상기 가시광선 레이저에 제공하는 함수 발생기; 및
상기 광 검출기로부터 상기 가시광선 전기적 신호를 제공받고, 상기 함수 발생기로부터 상기 전기적 신호 파형 또는 그 생성 시점을 제공받아서 상기 가시광선 전기적 신호의 지연된 시간을 산출하여 상기 연산부로 전달하는 지연시간 검출기
를 포함하는, 거리 측정 장치. - 측정대상으로 레이저 광을 조사하여 반사된 광을 수광하여 상기 측정 대상까지의 거리를 측정하는 장치에 있어서,
근적외선 레이저 펄스를 생성하여 상기 측정 대상을 향해 방출하고, 상기 측정 대상으로부터 반사된 근적외선 레이저 펄스를 수광하여 근적외선 전기적 신호로 변환하는 근적외선 레이저 광학계;
가시광선 레이저 광을 생성하여 적어도 일부는 상기 측정 대상을 향해 방출하고 적어도 다른 일부는 기준면 미러에서 반사시키며, 상기 측정 대상으로부터 반사된 가시광선 레이저 광을 상기 기준면 미러에서 반사된 가시광선 레이저 광과 간섭시킨 간섭신호를 가시광선 전기적 신호로 변환하는 가시광선 레이저 광학계; 및
상기 근적외선 레이저 광학계로부터 상기 근적외선 전기적 신호를 제공받아 제2 정밀도 거리 값 ~D'을 구하고 하기 식(3)에 따라 정수 n을 계산하며, 상기 가시광선 레이저 광학계로부터 상기 가시광선 전기적 신호로부터 얻은 상기 제2 정밀도보다 높은 제3 정밀도 거리 값 d'을 제공받고 하기 식(4)에 따라 실제 거리 D'을 산출하는 연산부
를 포함하는 거리 측정 장치.
n = [~D'/NAR'] (3)
D' = n x NAR + d' (4)
(여기서, [ ] 은 가우스 함수이고, ~D'는 근적외선 레이저 광학계에서 측정된 거리, NAR'은 가시광선 레이저 광학계의 비모호성 범위(Non-Ambiguity Range) 상수, D'는 실제 거리, 그리고 d'은 가시광선 레이저 광학계에서 측정된 거리임) - 제 8 항에 있어서,
상기 근적외선 레이저 광학계는,
상기 근적외선 레이저 펄스를 생성하여 방출하는 근적외선 펄스 레이저;
상기 방출된 근적외선 레이저 펄스를 통과시키고, 상기 반사된 근적외선 레이저 펄스를 수광하여 광 경로를 변경시키는 제1 광 커플러;
상기 제1 광 커플러에서 경로가 변경된 상기 반사된 근적외선 펄스 레이저를 수광하고 상기 근적외선 전기적 신호를 생성하여 상기 연산부로 전달하는 신호 검출부
를 포함하는, 거리 측정 장치. - 제 8 항에 있어서,
상기 근적외선 레이저 광학계로부터 방출되는 근적외선 레이저 펄스와 상기 가시광선 레이저 광학계로부터 방출되는 가시광선 레이저 광을 결합하여 상기 측정 대상으로 조사하고, 상기 측정 대상으로부터 반사되는 광을 수광하여 상기 근적외선 레이저 펄스와 상기 가시광선 레이저 광으로 분리하여 전송하는 제2 광 커플러를 더 포함하는 거리 측정 장치. - 제 8 항에 있어서,
상기 가시광선 레이저 광학계는,
상기 가시광선 레이저 광을 생성하여 방출하는 가시광선 레이저;
상기 방출된 가시광선 레이저 광을 통과시키고, 상기 측정 대상으로부터 반사된 가시광선 레이저 광을 수광하여 광 경로를 변경시키는 제3 광 커플러;
상기 기준면 미러로부터 반사된 가시광선 레이저 광과 상기 측정 대상으로부터 반사된 가시광선 레이저 광을 수광하여 간섭시킨 간섭신호를 상기 가시광선 전기적 신호로 변환하는 광 검출기;
상기 광 검출기로부터 상기 가시광선 전기적 신호를 제공받아 상기 제3 정밀도 거리 값 d'을 산출하여 상기 연산부로 제공하는 간섭신호 분석기
를 포함하는, 거리 측정 장치. - 제 8 항에 있어서,
상기 근적외선 레이저 광학계에서 방출되는 상기 근적외선 레이저 펄스는 통과시키고 상기 가시광선 레이저 광학계에서 방출되는 상기 가시광선 레이저 광은 반사시키는 제1 광 분할기를 더 포함하는 거리 측정 장치. - 제 8 항에 있어서,
상기 근적외선 레이저 광학계는,
상기 근적외선 레이저 펄스를 생성하여 방출하는 근적외선 펄스 레이저;
상기 방출된 근적외선 레이저 펄스의 일부를 반사시켜 상기 기준면 미러로 전달하고 다른 일부를 통과시켜 상기 측정 대상으로 조사하며, 상기 측정 대상으로부터 반사된 근적외선 레이저 펄스를 수광하여 광 경로를 변경시키는 제2 광 분할기;
상기 측정 대상으로부터 반사된 근적외선 레이저 펄스와 상기 기준면 미러로부터 반사된 근적외선 레이저 펄스를 수광하여 상기 근적외선 전기적 신호를 생성하여 상기 연산부로 전달하는 신호 검출부
를 포함하는, 거리 측정 장치. - 제 8 항에 있어서,
상기 가시광선 레이저 광학계는,
상기 가시광선 레이저 광을 생성하여 방출하는 가시광선 레이저;
상기 방출된 가시광선 레이저 광의 일부를 반사시켜 상기 기준면 미러로 전달하고 다른 일부를 통과시켜 상기 측정 대상으로 조사하는 제2 광 분할기;
상기 방출된 가시광선 레이저 광을 반사시키고, 상기 기준면 미러로부터 및 상기 측정 대상으로부터 각각 반사된 가시광선 레이저 광을 통과시키는 제3 광 분할기;
상기 기준면 미러 및 상기 측정 대상으로부터 각각 반사된 가시광선 레이저 광을 수광하여 간섭시킨 간섭신호를 상기 가시광선 전기적 신호를 변환하는 광 검출기; 및
상기 광 검출기로부터 상기 가시광선 전기적 신호를 전달받아 상기 제3 정밀도 거리 값 d'을 산출하여 상기 연산부로 전달하는 간섭신호 분석기
를 포함하는, 거리 측정 장치.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180139418A KR102177933B1 (ko) | 2018-11-13 | 2018-11-13 | 가시광선 레이저와 근적외선 펄스 레이저를 이용한 거리 측정 장치 및 측정 방법 |
| PCT/KR2019/014686 WO2020101233A1 (ko) | 2018-11-13 | 2019-11-01 | 가시광선 레이저와 근적외선 펄스 레이저를 이용한 거리 측정 장치 및 측정 방법 |
| US17/292,061 US12372618B2 (en) | 2018-11-13 | 2019-11-01 | Distance measuring device and measuring method by using visible laser and near-infrared pulse laser |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180139418A KR102177933B1 (ko) | 2018-11-13 | 2018-11-13 | 가시광선 레이저와 근적외선 펄스 레이저를 이용한 거리 측정 장치 및 측정 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200055600A true KR20200055600A (ko) | 2020-05-21 |
| KR102177933B1 KR102177933B1 (ko) | 2020-11-12 |
Family
ID=70731543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180139418A Active KR102177933B1 (ko) | 2018-11-13 | 2018-11-13 | 가시광선 레이저와 근적외선 펄스 레이저를 이용한 거리 측정 장치 및 측정 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12372618B2 (ko) |
| KR (1) | KR102177933B1 (ko) |
| WO (1) | WO2020101233A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220067509A (ko) * | 2020-11-17 | 2022-05-24 | 한국과학기술원 | 전광 샘플링 기반 타이밍 검출기의 모호함 없는 거리를 늘리는 방법, 이를 이용한 거리 측정 방법 및 거리 측정 시스템 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7483432B2 (ja) * | 2020-03-19 | 2024-05-15 | 京セラ株式会社 | 走査装置及び測距装置 |
| CN117543325A (zh) | 2021-12-29 | 2024-02-09 | 深圳市镭神智能系统有限公司 | 一种激光器、激光雷达、机动车及其机器人 |
| CN116224291A (zh) * | 2022-12-29 | 2023-06-06 | 挚感(苏州)光子科技有限公司 | 带同轴可见引导激光的位移和距离激光测量装置和方法 |
| CN117452422B (zh) * | 2023-11-06 | 2024-07-30 | 广州市星飞达电子科技有限公司 | 一种用于中远程测距的激光脉冲连续测距方法及系统 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR870004316A (ko) * | 1985-10-26 | 1987-05-08 | 에이. 더블유. 카람벨라스 | 레이저 거리 측정기 및 열 영상 장치 |
| KR930020170A (ko) * | 1992-03-18 | 1993-10-19 | 천성순 | 비선형 결정을 이용한 레이저 거리 측정기 |
| KR970022387A (ko) * | 1995-10-14 | 1997-05-28 | 김광호 | 근적외선 광학계의 정렬 장치 및 방법 |
| KR101529513B1 (ko) * | 2014-04-14 | 2015-06-17 | 국방과학연구소 | 다중 대역 투과식 공통 광학 장치 |
| KR20150091779A (ko) * | 2014-02-04 | 2015-08-12 | 한국전자통신연구원 | 다중 센서를 이용한 영상 처리 시스템 |
| KR101589644B1 (ko) * | 2015-04-16 | 2016-01-28 | 한화탈레스 주식회사 | 광대역 광학 장치 |
| KR20160145536A (ko) * | 2014-02-21 | 2016-12-20 | 삼성전자주식회사 | 홍채 컬러 인식을 갖는 멀티-밴드 생체인식 카메라 |
| JP2017195569A (ja) * | 2016-04-22 | 2017-10-26 | コニカミノルタ株式会社 | 監視システム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120007735A (ko) * | 2010-07-15 | 2012-01-25 | 삼성전기주식회사 | 거리 측정 모듈 및 이를 포함하는 전자 장치 |
| US9225959B2 (en) * | 2012-01-10 | 2015-12-29 | Samsung Electronics Co., Ltd. | Method and apparatus for recovering depth value of depth image |
| JP2013195117A (ja) * | 2012-03-16 | 2013-09-30 | Ricoh Co Ltd | 測距装置 |
| US9354051B2 (en) * | 2012-09-13 | 2016-05-31 | Laser Technology, Inc. | System and method for a rangefinding instrument incorporating pulse and continuous wave signal generating and processing techniques for increased distance measurement accuracy |
| JP2015025901A (ja) * | 2013-07-25 | 2015-02-05 | 船井電機株式会社 | レーザ走査装置 |
| KR20160069404A (ko) * | 2014-12-08 | 2016-06-16 | (주)이오시스템 | 거리측정용 복합 관측장치 |
| KR20160114445A (ko) * | 2015-03-24 | 2016-10-05 | 한화테크윈 주식회사 | 라이다 시스템 |
| CN105911559A (zh) | 2016-06-02 | 2016-08-31 | 中国科学院光电研究院 | 基于可见光-近红外-短波红外波段的激光雷达系统 |
| KR101896477B1 (ko) * | 2017-11-16 | 2018-09-07 | 영남대학교 산학협력단 | 스캐닝 라이다 장치 및 그 방법 |
-
2018
- 2018-11-13 KR KR1020180139418A patent/KR102177933B1/ko active Active
-
2019
- 2019-11-01 WO PCT/KR2019/014686 patent/WO2020101233A1/ko not_active Ceased
- 2019-11-01 US US17/292,061 patent/US12372618B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR870004316A (ko) * | 1985-10-26 | 1987-05-08 | 에이. 더블유. 카람벨라스 | 레이저 거리 측정기 및 열 영상 장치 |
| KR930020170A (ko) * | 1992-03-18 | 1993-10-19 | 천성순 | 비선형 결정을 이용한 레이저 거리 측정기 |
| KR970022387A (ko) * | 1995-10-14 | 1997-05-28 | 김광호 | 근적외선 광학계의 정렬 장치 및 방법 |
| KR20150091779A (ko) * | 2014-02-04 | 2015-08-12 | 한국전자통신연구원 | 다중 센서를 이용한 영상 처리 시스템 |
| KR20160145536A (ko) * | 2014-02-21 | 2016-12-20 | 삼성전자주식회사 | 홍채 컬러 인식을 갖는 멀티-밴드 생체인식 카메라 |
| KR101529513B1 (ko) * | 2014-04-14 | 2015-06-17 | 국방과학연구소 | 다중 대역 투과식 공통 광학 장치 |
| KR101589644B1 (ko) * | 2015-04-16 | 2016-01-28 | 한화탈레스 주식회사 | 광대역 광학 장치 |
| JP2017195569A (ja) * | 2016-04-22 | 2017-10-26 | コニカミノルタ株式会社 | 監視システム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220067509A (ko) * | 2020-11-17 | 2022-05-24 | 한국과학기술원 | 전광 샘플링 기반 타이밍 검출기의 모호함 없는 거리를 늘리는 방법, 이를 이용한 거리 측정 방법 및 거리 측정 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210396848A1 (en) | 2021-12-23 |
| WO2020101233A1 (ko) | 2020-05-22 |
| KR102177933B1 (ko) | 2020-11-12 |
| US12372618B2 (en) | 2025-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102177933B1 (ko) | 가시광선 레이저와 근적외선 펄스 레이저를 이용한 거리 측정 장치 및 측정 방법 | |
| US10866319B2 (en) | Stray-light tolerant lidar measurement system and stray-light tolerant lidar measurement method | |
| JP5590884B2 (ja) | 光学距離測定方法及びそれを用いた光学距離測定装置 | |
| CN101405613B (zh) | 用于光学测距的装置 | |
| US8687173B2 (en) | Compact fiber optic geometry for a counter chirp FMCW coherent laser radar | |
| CN116745640A (zh) | Lidar系统噪声校准与目标探测 | |
| IL273779B2 (en) | Method and apparatus for mapping and ranging based on coherent-time comparison | |
| US7710547B2 (en) | Coherent optical range finder | |
| JP2016161411A (ja) | 光波距離計 | |
| CN102265178A (zh) | 距离测定装置及距离测定方法 | |
| KR102377583B1 (ko) | 광 거리 측정 장치 | |
| CN103576162A (zh) | 激光雷达装置及利用该装置测量目标物距离的方法 | |
| JP2014185956A (ja) | 距離測定装置 | |
| US12468033B2 (en) | Distance measurement by means of an active optical sensor system | |
| US11079218B2 (en) | Measuring distance using a laser processing system with optical amplifier for amplifying measuring beam or reflected part of measurement beam | |
| CN116626696A (zh) | 一种调频连续波激光测距装置 | |
| CN103308922A (zh) | 单激光器单通道实现的双波长脉冲激光测距装置及方法 | |
| WO2022209789A1 (ja) | 光ビーム生成装置および光探知機 | |
| KR20160070686A (ko) | 측정 장치 | |
| KR102527463B1 (ko) | 의사 난수 2진 시퀀스를 이용한 라이다 | |
| EP1610476A1 (en) | Optical signal time-of-flight measurements | |
| JP2023152632A5 (ko) | ||
| JP6342857B2 (ja) | 光反射測定装置および光反射測定方法 | |
| WO2023017765A1 (ja) | 測定装置 | |
| US4397548A (en) | Distance measuring system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181113 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200312 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20200826 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20201106 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20201106 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20230906 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240911 Start annual number: 5 End annual number: 5 |