KR20200057532A - 공기조화기 및 그의 동작 방법 - Google Patents
공기조화기 및 그의 동작 방법 Download PDFInfo
- Publication number
- KR20200057532A KR20200057532A KR1020180142044A KR20180142044A KR20200057532A KR 20200057532 A KR20200057532 A KR 20200057532A KR 1020180142044 A KR1020180142044 A KR 1020180142044A KR 20180142044 A KR20180142044 A KR 20180142044A KR 20200057532 A KR20200057532 A KR 20200057532A
- Authority
- KR
- South Korea
- Prior art keywords
- rpm
- current
- system resistance
- value
- duty value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F11/00—Control or safety arrangements
- F24F11/70—Control systems characterised by their outputs; Constructional details thereof
- F24F11/72—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure
- F24F11/74—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure for controlling air flow rate or air velocity
- F24F11/77—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure for controlling air flow rate or air velocity by controlling the speed of ventilators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F11/00—Control or safety arrangements
- F24F11/62—Control or safety arrangements characterised by the type of control or by internal processing, e.g. using fuzzy logic, adaptive control or estimation of values
- F24F11/63—Electronic processing
- F24F11/64—Electronic processing using pre-stored data
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F2110/00—Control inputs relating to air properties
- F24F2110/40—Pressure, e.g. wind pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F2140/00—Control inputs relating to system states
- F24F2140/50—Load
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F2140/00—Control inputs relating to system states
- F24F2140/60—Energy consumption
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B30/00—Energy efficient heating, ventilation or air conditioning [HVAC]
- Y02B30/70—Efficient control or regulation technologies, e.g. for control of refrigerant flow, motor or heating
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Fuzzy Systems (AREA)
- Mathematical Physics (AREA)
- Fluid Mechanics (AREA)
- Air Conditioning Control Device (AREA)
Abstract
Description
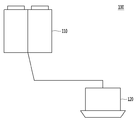
도 1b는 본 발명의 실시 예에 따른 덕트형 공기조화기의 실내기가 도시된 도면이다.
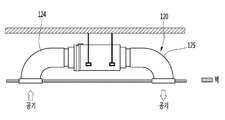
도 2는 본 발명의 실시 예에 따른 덕트형 공기조화기 실내기의 내부 단면도이다.
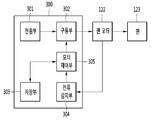
도 3은 본 발명의 실시 예에 따른 덕트형 공기조화기 실내기의 제어 블록도이다.
도 4는 본 발명의 실시 예에 따른 공기조화기에 저장된 듀티 값 및 전류 값에 따른 정압 및 풍량을 맵핑한 표의 예시 도면이다.
도 5는 본 발명의 실시 예에 따른 공기조화기의 동작 방법을 나타내는 순서도이다.
300: 팬 모터 제어장치 301: 전원부
302: 구동부 303: 저장부
304: 전류 감지부 305: 모터 제어부
Claims (10)
- 전원을 공급하는 전원부;
듀티 값에 따라 상기 전원부에서 공급되는 전원을 모터 구동 전압으로 변환하여 팬 모터에 전달하는 구동부;
상기 팬 모터에 입력되는 전류 값을 감지하는 전류 감지부;
듀티 값 및 전류 값에 대응하는 정압과 풍량을 저장하는 저장부; 및
목표 RPM에 따라 상기 구동부에 듀티 값을 전달하는 모터 제어부를 포함하고,
상기 모터 제어부는
목표 RPM을 기준 RPM으로 설정한 후 상기 저장부에 기초하여 상기 구동부에 전달한 듀티 값 및 상기 전류 감지부가 감지한 전류 값에 따른 현재 정압 및 현재 풍량을 획득하고, 상기 현재 정압 및 현재 풍량에 따라 현재 RPM이 상기 목표 RPM에 도달하기 위한 설정 RPM을 산출하는 시스템 저항 산출 운전을 실시하는 공기조화기. - 제1항에 있어서,
상기 모터 제어부는
상기 팬 모터의 현재 RPM이 설정 RPM에 도달하도록 상기 듀티 값과 상기 팬 모터에 입력되는 전류 값 중 적어도 하나를 조절하는 공기조화기. - 제2항에 있어서,
상기 모터 제어부는
상기 팬 모터의 현재 RPM이 설정 RPM에 도달시 변경된 듀티 값, 전류 값 및 설정 RPM을 포함하는 시스템 저항 정보를 저장하도록 상기 저장부를 제어하는 공기조화기. - 제3항에 있어서,
상기 모터 제어부는
상기 시스템 저항 정보가 저장된 경우, 목표 RPM을 상기 저장된 RPM으로 설정하고, 현재 RPM이 목표 RPM에 도달시 듀티 값, 전류 값을 상기 저장부에 저장된 듀티 값, 전류 값과 비교하여 시스템 저항 정보의 변경 여부를 획득하는 공기조화기. - 제4항에 있어서,
상기 모터 제어부는
상기 시스템 저항 정보가 변경되지 않은 경우 운전 명령에 따라 상기 저장부에 저장된 정보에 기초하여 상기 구동부를 제어하는 공기조화기. - 제4항에 있어서,
상기 모터 제어부는
상기 시스템 저항 정보가 변경된 경우,
목표 RPM을 기준 RPM으로 설정한 후 상기 저장부에 기초하여 상기 구동부에 전달한 듀티 값 및 상기 전류 감지부가 감지한 전류 값에 따른 현재 정압 및 현재 풍량을 획득하고, 상기 현재 정압 및 현재 풍량에 따라 현재 RPM이 상기 목표 RPM에 도달하기 위한 설정 RPM을 산출하는 시스템 저항 산출 운전을 재실시하는 공기조화기. - 제1항에 있어서,
상기 모터 제어부는
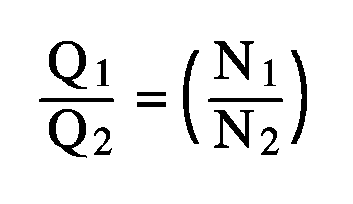
상기 설정 RPM 산출시 풍량과 상기 팬 모터의 RPM이 비례하는 수학식과, 정압과 상기 팬 모터의 RPM의 제곱에 비례하는 수학식에 기초하여 설정 RPM을 산출하는 공기조화기. - 시스템 저항 산출 운전을 실시하는 단계; 및
상기 시스템 저항 산출 운전 후 운전 명령에 따라 운전하는 단계를 포함하고,
상기 시스템 저항 산출 운전을 실시하는 단계는
목표 RPM을 기준 RPM으로 설정하는 단계,
저장부에 저장된 듀티 값 및 전류 값에 대응하는 정압 및 풍량 정보에 기초하여, 팬 모터를 제어하는 듀티 값 및 상기 팬 모터에 입력되는 전류 값에 따른 현재 정압 및 현재 풍량을 획득하는 단계, 및
상기 현재 정압 및 현재 풍량에 따라 현재 RPM이 상기 목표 RPM에 도달하기 위한 설정 RPM을 산출하는 단계를 포함하는 공기조화기의 동작 방법. - 제8항에 있어서,
상기 시스템 저항 산출 운전을 실시하는 단계는
팬 모터의 현재 RPM이 설정 RPM에 도달하도록 상기 듀티 값과 상기 팬 모터에 입력되는 전류 값 중 적어도 하나를 조절하는 단계, 및
상기 팬 모터의 현재 RPM이 설정 RPM에 도달시 변경된 듀티 값, 전류 값 및 설정 RPM을 포함하는 시스템 저항 정보를 저장하는 단계를 더 포함하는 공기조화기의 동작 방법. - 제9항에 있어서,
상기 시스템 저항 정보가 기 저장된 경우 시스템 저항 정보의 변경 확인 운전을 실시하는 단계를 더 포함하고,
상기 시스템 저항 정보의 변경 확인 운전을 실시하는 단계는
목표 RPM을 상기 시스템 저항 정보에 저장된 RPM으로 설정하는 단계,
현재 RPM이 목표 RPM에 도달시 듀티 값, 전류 값을 상기 시스템 저항 정보에 포함된 듀티 값, 전류 값과 비교하는 단계,
비교 결과, 현재 RPM이 목표 RPM에 도달시 듀티 값 및 전류 값이 상기 시스템 저항 정보에 포함된 듀티 값 및 전류 값과 상이하면 시스템 저항 정보가 변경된 것으로 판단하는 단계, 및
비교 결과, 현재 RPM이 목표 RPM에 도달시 듀티 값 및 전류 값이 상기 시스템 저항 정보에 포함된 듀티 값 및 전류 값과 동일하면 시스템 저항 정보가 변경되지 않은 것으로 판단하는 단계를 더 포함하는 공기조화기의 동작 방법.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180142044A KR102627957B1 (ko) | 2018-11-16 | 2018-11-16 | 공기조화기 및 그의 동작 방법 |
| PCT/KR2019/014215 WO2020101217A1 (en) | 2018-11-16 | 2019-10-25 | Air conditioner of fan motor and operating method thereof |
| EP19883416.0A EP3881010B1 (en) | 2018-11-16 | 2019-10-25 | Air conditioner of fan motor and operating method thereof |
| US17/293,249 US11953222B2 (en) | 2018-11-16 | 2019-10-25 | Fan motor of air conditioner and operating method thereof |
| CN201980075280.3A CN113039397A (zh) | 2018-11-16 | 2019-10-25 | 风扇电机的空调及其操作方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180142044A KR102627957B1 (ko) | 2018-11-16 | 2018-11-16 | 공기조화기 및 그의 동작 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200057532A true KR20200057532A (ko) | 2020-05-26 |
| KR102627957B1 KR102627957B1 (ko) | 2024-01-23 |
Family
ID=70731516
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180142044A Active KR102627957B1 (ko) | 2018-11-16 | 2018-11-16 | 공기조화기 및 그의 동작 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11953222B2 (ko) |
| EP (1) | EP3881010B1 (ko) |
| KR (1) | KR102627957B1 (ko) |
| CN (1) | CN113039397A (ko) |
| WO (1) | WO2020101217A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021046994A (ja) * | 2019-09-20 | 2021-03-25 | 株式会社富士通ゼネラル | 空気調和装置 |
| US20240053045A1 (en) * | 2022-08-09 | 2024-02-15 | Precision Air Products Co. | Airflow management systems and methods for filtered air systems |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060099084A1 (en) * | 2004-11-08 | 2006-05-11 | Matsushita Electric Industrial Co., Ltd. | Electric blower |
| KR20110113900A (ko) * | 2010-04-12 | 2011-10-19 | 영 춘 정 | 정풍량 환기 제어시스템 |
| KR20130032780A (ko) * | 2011-09-23 | 2013-04-02 | 엘지전자 주식회사 | 공기 조화기 및 이의 제어 방법 |
| KR20180007202A (ko) | 2016-07-12 | 2018-01-22 | 엘지전자 주식회사 | 덕트형 공기조화기의 팬 모터 제어장치 및 이의 동작방법 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006207880A (ja) * | 2005-01-26 | 2006-08-10 | Matsushita Electric Ind Co Ltd | 換気扇 |
| JP4687730B2 (ja) * | 2008-03-06 | 2011-05-25 | パナソニック株式会社 | 送風装置およびそれを搭載した電気機器 |
| US20100256821A1 (en) | 2009-04-01 | 2010-10-07 | Sntech Inc. | Constant airflow control of a ventilation system |
| JP2012241969A (ja) * | 2011-05-18 | 2012-12-10 | Mitsubishi Heavy Ind Ltd | 空気調和機の風量調整装置 |
| WO2013031597A1 (ja) * | 2011-08-31 | 2013-03-07 | 三洋電機株式会社 | 空気調和装置及び空気調和装置の制御方法 |
| JP5896719B2 (ja) * | 2011-12-15 | 2016-03-30 | 三菱重工業株式会社 | 空気調和機 |
| KR20130075614A (ko) * | 2011-12-27 | 2013-07-05 | 엘지전자 주식회사 | 덕트형 공기조화기 및 덕트형 공기조화기의 제어방법 |
| KR101376914B1 (ko) | 2012-01-17 | 2014-03-21 | 삼성전기주식회사 | 모터 제어 장치 및 방법 |
| ES2643743T3 (es) * | 2013-04-30 | 2017-11-24 | Gidelmar, S.A. | Método y sistema de ajuste automático del funcionamiento de un ventilador, y programa de ordenador que implementa el método |
| CN104344492B (zh) * | 2013-07-25 | 2018-03-27 | 广东美的制冷设备有限公司 | 管道式通风装置及其风量控制方法 |
| CN106895467A (zh) * | 2017-05-09 | 2017-06-27 | 华帝股份有限公司 | 一种恒风量吸油烟机及其控制方法 |
-
2018
- 2018-11-16 KR KR1020180142044A patent/KR102627957B1/ko active Active
-
2019
- 2019-10-25 CN CN201980075280.3A patent/CN113039397A/zh active Pending
- 2019-10-25 WO PCT/KR2019/014215 patent/WO2020101217A1/en not_active Ceased
- 2019-10-25 EP EP19883416.0A patent/EP3881010B1/en active Active
- 2019-10-25 US US17/293,249 patent/US11953222B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060099084A1 (en) * | 2004-11-08 | 2006-05-11 | Matsushita Electric Industrial Co., Ltd. | Electric blower |
| KR20110113900A (ko) * | 2010-04-12 | 2011-10-19 | 영 춘 정 | 정풍량 환기 제어시스템 |
| KR20130032780A (ko) * | 2011-09-23 | 2013-04-02 | 엘지전자 주식회사 | 공기 조화기 및 이의 제어 방법 |
| KR20180007202A (ko) | 2016-07-12 | 2018-01-22 | 엘지전자 주식회사 | 덕트형 공기조화기의 팬 모터 제어장치 및 이의 동작방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3881010B1 (en) | 2025-04-30 |
| US11953222B2 (en) | 2024-04-09 |
| KR102627957B1 (ko) | 2024-01-23 |
| EP3881010A1 (en) | 2021-09-22 |
| EP3881010A4 (en) | 2022-08-03 |
| US20210404689A1 (en) | 2021-12-30 |
| CN113039397A (zh) | 2021-06-25 |
| WO2020101217A1 (en) | 2020-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8904814B2 (en) | System and method for detecting a fault condition in a compressor | |
| CN101960148B (zh) | 送风装置及装载了它的电气设备 | |
| JP6244791B2 (ja) | 空調システム | |
| WO2014139201A1 (zh) | 一种用来替换psc电机的ecm电机力矩自动校正的方法 | |
| JP6331432B2 (ja) | 空調システム | |
| EP3054229B1 (en) | Air conditioner | |
| KR102267353B1 (ko) | 공기조화기 및 그 제어방법 | |
| EP3531035A1 (en) | Air conditioner system, air conditioner control device, air conditioner method, and program | |
| CN110186173A (zh) | 风机控制方法、室内机、空调器以及计算机可读存储介质 | |
| KR102627957B1 (ko) | 공기조화기 및 그의 동작 방법 | |
| JP6297176B2 (ja) | 室内機及びこれを用いた空気調和装置 | |
| KR20180007202A (ko) | 덕트형 공기조화기의 팬 모터 제어장치 및 이의 동작방법 | |
| JP2013253731A (ja) | 空気調和装置の室内機 | |
| JP2003254287A (ja) | ファンモータおよびそれを搭載した換気装置 | |
| JP2019020015A (ja) | 空気調和機およびその制御方法 | |
| US20170102157A1 (en) | Air conditioner units and methods for determining indoor room temperatures | |
| JP2021105472A (ja) | 空気調和機、空気調和システム、およびサーバ | |
| US11448415B2 (en) | Auto-adjusting fan assembly for an air conditioning appliance | |
| WO2013022832A1 (en) | Methods and systems for controlling a motor | |
| JP3801067B2 (ja) | 電源電圧検出装置および空気調和機 | |
| JP2013194969A (ja) | 空気調和装置 | |
| JP4910577B2 (ja) | 逆相検知装置、それを備えた空気調和装置、及び、逆相検知方法 | |
| US20260071770A1 (en) | Capacity sensing for an air conditioning appliance over time | |
| JP2012149546A (ja) | 送風装置およびそれを搭載した電気機器 | |
| CN105091254B (zh) | 控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181116 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210819 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20181116 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20221130 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230504 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20221130 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| J201 | Request for trial against refusal decision | ||
| PJ0201 | Trial against decision of rejection |
Patent event date: 20230616 Comment text: Request for Trial against Decision on Refusal Patent event code: PJ02012R01D Patent event date: 20230504 Comment text: Decision to Refuse Application Patent event code: PJ02011S01I Appeal kind category: Appeal against decision to decline refusal Appeal identifier: 2023101001305 Request date: 20230616 |
|
| J301 | Trial decision |
Free format text: TRIAL NUMBER: 2023101001305; TRIAL DECISION FOR APPEAL AGAINST DECISION TO DECLINE REFUSAL REQUESTED 20230616 Effective date: 20230904 |
|
| PJ1301 | Trial decision |
Patent event code: PJ13011S01D Patent event date: 20230904 Comment text: Trial Decision on Objection to Decision on Refusal Appeal kind category: Appeal against decision to decline refusal Request date: 20230616 Decision date: 20230904 Appeal identifier: 2023101001305 |
|
| PS0901 | Examination by remand of revocation | ||
| GRNO | Decision to grant (after opposition) | ||
| PS0701 | Decision of registration after remand of revocation |
Patent event date: 20231025 Patent event code: PS07012S01D Comment text: Decision to Grant Registration Patent event date: 20230904 Patent event code: PS07011S01I Comment text: Notice of Trial Decision (Remand of Revocation) |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240117 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240118 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |