KR20200057621A - 로봇 및 로봇에 케이블을 접속하는 방법 - Google Patents
로봇 및 로봇에 케이블을 접속하는 방법 Download PDFInfo
- Publication number
- KR20200057621A KR20200057621A KR1020190133926A KR20190133926A KR20200057621A KR 20200057621 A KR20200057621 A KR 20200057621A KR 1020190133926 A KR1020190133926 A KR 1020190133926A KR 20190133926 A KR20190133926 A KR 20190133926A KR 20200057621 A KR20200057621 A KR 20200057621A
- Authority
- KR
- South Korea
- Prior art keywords
- cable
- robot
- connector
- duct
- tube
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
- B25J19/0029—Means for supplying energy to the end effector arranged within the different robot elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Abstract
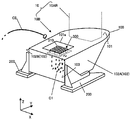
로봇은 다관절 아암과, 기부를 구비한다. 기부는 다관절 아암의 기단측을 지지한다. 기부는 본체부와, 커넥터 유닛을 구비한다. 본체부는 다관절 아암을 지지하는 지지면에 개구를 포함한다. 커넥터 유닛은 본체부의 내부에 마련되는 내부 케이블에 접속되는 케이블 커넥터를 포함하며, 케이블 커넥터에 있어서의 외부 케이블용의 접속구가 개구로 향하도록 본체부의 내부에 마련된다. 또한, 본체부는 내부에 마련되는 내부 튜브와 외부 튜브를 연결하는 튜브 커넥터를 서로 대향하는 본체 측면들의 각각에 구비한다.
Description
도 2는 기부의 측면도이다.
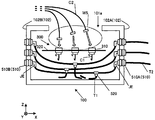
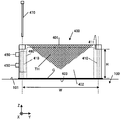
도 3은 본체부에 있어서의 케이블 및 튜브의 위치 관계를 도시하는 모식도이다.
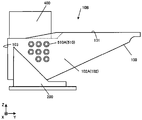
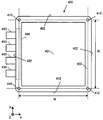
도 4는 케이블 덕트의 저면도이다.
도 5는 케이블 덕트의 측면도이다.
도 6은 케이블의 접속 순서를 나타내는 흐름도이다.
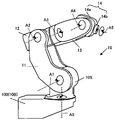
도 7은 로봇의 사시도이다.
10B : 기부 10S : 선회부
11 : 제 1 아암 12 : 제 2 아암
13 : 제 3 아암 14 : 손목부
14a : 선회부 14b : 회전부
100 : 본체부 101 : 상면(지지면)
101a : 개구 102 : 측면(본체 측면)
103 : 배면 200 : 브래킷
300 : 커넥터 유닛 310 : 케이블 커넥터
320 : 플레이트 400 : 케이블 덕트
401 : 상면 402 : 측면(덕트 측면)
403 : 저면 410 : 관통 구멍
411 : 카운터보어 450 : 케이블 그라운드
460 : 도출부 470 : 보스
510 : 튜브 커넥터 520 : 분기 커넥터
A0 : 선회축 A1 : 제 1 축
A2 : 제 2 축 A3 : 제 3 축
A4 : 제 4 축 A5 : 제 5 축
C1 : 내부 케이블 C2 : 외부 케이블
G : 개스킷 JE : 엘보 조인트
T1 : 내부 튜브 T2 : 외부 튜브
TH : 육박부
Claims (11)
- 아암과,
상기 아암의 기단측을 지지하는 기부를 구비하고,
상기 기부는,
상기 아암을 지지하는 지지면에 개구를 포함하는 본체부와,
상기 본체부의 내부에 마련되는 내부 케이블에 접속되는 케이블 커넥터를 포함하며, 상기 케이블 커넥터에 있어서의 외부 케이블용의 접속구가 상기 개구로 향하도록 상기 본체부의 내부에 마련되는 커넥터 유닛을 구비하는
로봇. - 제 1 항에 있어서,
상기 본체부는,
상기 본체부의 내부에 마련되는 내부 튜브와 외부 튜브를 연결하는 튜브 커넥터를, 서로 대향하는 본체 측면들의 각각에 구비하는
로봇. - 제 2 항에 있어서,
상기 내부 튜브를 분기하는 분기 커넥터를 구비하고,
상기 분기 커넥터에 의해 분기된 상기 내부 튜브는,
상기 서로 대향하는 본체 측면들의 상기 튜브 커넥터에 각각 접속되는
로봇. - 제 3 항에 있어서,
상기 분기 커넥터는,
상기 커넥터 유닛보다 하측에 배치되는
로봇. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 지지면의 상기 개구를 덮는 동시에, 상기 케이블 커넥터의 상기 접속구에 접속되는 상기 외부 케이블의 선단측을 수용하며, 상기 본체부에 착탈 가능하게 결합되는 케이블 덕트를 구비하는
로봇. - 제 5 항에 있어서,
상기 케이블 덕트는
상기 개구로부터 보아 정방형상이며,
상기 본체부에 결합된 때 상기 개구를 향하는 면이 개방된 통형상인
로봇. - 제 6 항에 있어서,
상기 케이블 덕트는,
4개의 덕트 측면 중 어느 하나에 상기 외부 케이블이 통과하는 도출부를 구비하는
로봇. - 제 7 항에 있어서,
상기 케이블 덕트는,
상기 개구로부터 보아 4개의 코너부를 각각 관통하는 관통 구멍을 구비하고,
상기 덕트 측면은,
상기 관통 구멍에 있어서의 축선 간의 폭이 상기 관통 구멍의 높이의 2배 이하인
로봇. - 아암과, 상기 아암의 기단측을 지지하는 기부를 구비하는 로봇에 케이블을 접속하는 방법으로서,
외부 케이블이 케이블 덕트의 일 측면에 마련된 도출부를 통과하는 단계;
상기 외부 케이블에 케이블 그라운드를 장착하는 단계;
상기 케이블 그라운드를 상기 케이블 덕트의 상기 도출부에 고정하는 단계;
상기 본체부의 내부에 마련되는 커넥터 유닛에 상기 외부 케이블을 접속하는 단계; 및
상기 케이블 덕트에 있어서의 도출부의 방향을 소망의 방향으로 한 상태에서 상기 케이블 덕트를 상기 기부에 고정하는 단계를 포함하는
로봇에 케이블을 접속하는 방법. - 제 9 항에 있어서,
상기 외부 케이블이 상기 도출부를 통과하는 단계는,
상기 외부 케이블의 선단측 부분이 소정 길이만큼 상기 케이블 덕트 내에 수용되는 것을 포함하는
로봇에 케이블을 접속하는 방법. - 제 9 항에 있어서,
상기 케이블 덕트를 상기 기부에 고정하는 단계에 앞서, 상기 커넥터 유닛에 내부 케이블이 접속되는 단계를 포함하는
로봇에 케이블을 접속하는 방법.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2018-215253 | 2018-11-16 | ||
| JP2018215253A JP6806124B2 (ja) | 2018-11-16 | 2018-11-16 | ロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200057621A true KR20200057621A (ko) | 2020-05-26 |
| KR102281411B1 KR102281411B1 (ko) | 2021-07-26 |
Family
ID=68531428
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190133926A Active KR102281411B1 (ko) | 2018-11-16 | 2019-10-25 | 로봇 및 로봇에 케이블을 접속하는 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11219999B2 (ko) |
| EP (1) | EP3663052B1 (ko) |
| JP (1) | JP6806124B2 (ko) |
| KR (1) | KR102281411B1 (ko) |
| CN (1) | CN111195899B (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7290475B2 (ja) * | 2019-05-30 | 2023-06-13 | ファナック株式会社 | ロボット |
| JP7451889B2 (ja) * | 2019-06-27 | 2024-03-19 | セイコーエプソン株式会社 | ロボット |
| JP7388887B2 (ja) * | 2019-11-13 | 2023-11-29 | ファナック株式会社 | ロボットの線条体ユニットおよび線条体配線方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005014159A (ja) * | 2003-06-26 | 2005-01-20 | Fanuc Ltd | ロボット |
| JP2018027615A (ja) * | 2013-06-24 | 2018-02-22 | レッドウッド ロボティックス エルエルシー | 周辺機器の迅速接続のための再構成可能なモジュール式作業セル |
| JP2018126831A (ja) | 2017-02-09 | 2018-08-16 | 株式会社安川電機 | 塗装システムおよび固定式操作ロボット |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4378959A (en) * | 1979-06-13 | 1983-04-05 | Thermwood Corporation | Apparatus for performing work functions |
| JPS60259397A (ja) * | 1984-06-01 | 1985-12-21 | 松下電器産業株式会社 | 工業用ロボツト |
| US6477913B1 (en) * | 1985-01-22 | 2002-11-12 | Fanuc Robotics North America, Inc. | Electric robot for use in a hazardous location |
| JPS63185596A (ja) * | 1987-01-26 | 1988-08-01 | フアナツク株式会社 | 産業用ロボツトのケ−ブル処理装置 |
| DE9103497U1 (de) * | 1991-03-21 | 1991-06-20 | Kuka Schweissanlagen + Roboter Gmbh, 8900 Augsburg | Mehrachsiger Manipulator |
| JPH081574A (ja) * | 1994-06-23 | 1996-01-09 | Fanuc Ltd | ロボット装置 |
| US5651519A (en) * | 1995-03-14 | 1997-07-29 | Goodrich; John J. | Robot dress bar |
| JP2820391B2 (ja) * | 1996-08-29 | 1998-11-05 | ファナック株式会社 | 産業用垂直多関節型ロボット |
| JP2003025270A (ja) * | 2001-07-23 | 2003-01-29 | Nachi Fujikoshi Corp | 産業用ロボットの配線配管処理装置 |
| JP2003117877A (ja) * | 2001-10-17 | 2003-04-23 | Japan Servo Co Ltd | 多関節型の産業用ロボット |
| WO2006085823A1 (en) * | 2005-02-11 | 2006-08-17 | Abb Ab | A method and a contact panel having contacts protruding through an opening in a cover forming part of an industrial robot |
| JP4349320B2 (ja) * | 2005-05-12 | 2009-10-21 | パナソニック株式会社 | マニピュレータ型ロボット |
| CN102079094B (zh) * | 2009-11-26 | 2013-11-06 | 鸿富锦精密工业(深圳)有限公司 | 机器人结构 |
| JP5338301B2 (ja) * | 2008-12-24 | 2013-11-13 | セイコーエプソン株式会社 | 水平多関節型ロボット |
| EP2448133B1 (en) * | 2010-06-11 | 2014-02-19 | Honda Motor Co., Ltd. | Communication network |
| CN102310404A (zh) * | 2010-06-29 | 2012-01-11 | 鸿富锦精密工业(深圳)有限公司 | 机器人 |
| JP5683988B2 (ja) * | 2011-02-08 | 2015-03-11 | ヤマハ発動機株式会社 | ロボット |
| JP2014100743A (ja) | 2012-11-16 | 2014-06-05 | Fanuc Ltd | 多関節ロボットのケーブル処理構造 |
| JP5660401B2 (ja) * | 2012-11-19 | 2015-01-28 | 株式会社安川電機 | ロボット装置 |
| JP5928416B2 (ja) * | 2013-07-26 | 2016-06-01 | 株式会社安川電機 | ロボットおよびロボットの製造方法 |
| JP5884785B2 (ja) * | 2013-07-30 | 2016-03-15 | 株式会社安川電機 | ロボット |
| JP6268920B2 (ja) * | 2013-10-28 | 2018-01-31 | セイコーエプソン株式会社 | ロボット |
| JP2016068202A (ja) * | 2014-09-30 | 2016-05-09 | セイコーエプソン株式会社 | ロボット |
| DE102015001624A1 (de) * | 2015-02-09 | 2016-08-11 | Kuka Roboter Gmbh | Robotersystem |
| JP6068548B2 (ja) * | 2015-04-09 | 2017-01-25 | ファナック株式会社 | 線条体を接続する接続部材がアームに配置された多関節ロボット |
| ITUB20159241A1 (it) * | 2015-12-23 | 2017-06-23 | Comau Spa | Robot industriale multi-asse, in particolare di tipo SCARA |
| DE112017000563T5 (de) * | 2016-01-30 | 2018-11-08 | Life Robotics Inc. | Roboterarmmechanismus |
| DE102016111521B4 (de) * | 2016-06-23 | 2018-03-01 | Lisa Dräxlmaier GmbH | Vorrichtung zum Herstellen eines Kabelbaums |
| JP2018001315A (ja) * | 2016-06-29 | 2018-01-11 | セイコーエプソン株式会社 | ロボット、制御装置およびロボットシステム |
| JP2018094659A (ja) * | 2016-12-12 | 2018-06-21 | セイコーエプソン株式会社 | ロボット、ロボット制御装置、及びロボットシステム |
| JP6988152B2 (ja) * | 2017-05-08 | 2022-01-05 | セイコーエプソン株式会社 | ロボット |
| JP6546216B2 (ja) * | 2017-05-22 | 2019-07-17 | ファナック株式会社 | 産業用ロボット |
| JP2019063892A (ja) * | 2017-09-28 | 2019-04-25 | セイコーエプソン株式会社 | ロボット、及びロボットシステム |
| JP7009935B2 (ja) * | 2017-11-06 | 2022-01-26 | セイコーエプソン株式会社 | ロボット |
-
2018
- 2018-11-16 JP JP2018215253A patent/JP6806124B2/ja active Active
-
2019
- 2019-10-16 CN CN201910981679.XA patent/CN111195899B/zh active Active
- 2019-10-25 KR KR1020190133926A patent/KR102281411B1/ko active Active
- 2019-11-11 EP EP19208281.6A patent/EP3663052B1/en active Active
- 2019-11-13 US US16/681,852 patent/US11219999B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005014159A (ja) * | 2003-06-26 | 2005-01-20 | Fanuc Ltd | ロボット |
| JP2018027615A (ja) * | 2013-06-24 | 2018-02-22 | レッドウッド ロボティックス エルエルシー | 周辺機器の迅速接続のための再構成可能なモジュール式作業セル |
| JP2018126831A (ja) | 2017-02-09 | 2018-08-16 | 株式会社安川電機 | 塗装システムおよび固定式操作ロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200156239A1 (en) | 2020-05-21 |
| KR102281411B1 (ko) | 2021-07-26 |
| JP6806124B2 (ja) | 2021-01-06 |
| EP3663052B1 (en) | 2021-06-16 |
| US11219999B2 (en) | 2022-01-11 |
| JP2020082215A (ja) | 2020-06-04 |
| CN111195899B (zh) | 2023-04-18 |
| EP3663052A1 (en) | 2020-06-10 |
| CN111195899A (zh) | 2020-05-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3002090B1 (en) | Robot | |
| KR102281411B1 (ko) | 로봇 및 로봇에 케이블을 접속하는 방법 | |
| EP2756930B1 (en) | Robot | |
| CN104070537B (zh) | 具备分线盘的机器人 | |
| US20200290212A1 (en) | Robot | |
| WO2018195969A1 (en) | A cable harness management module and a robot | |
| AU2017285894B2 (en) | Hose guiding device for a crane tool | |
| US10744637B2 (en) | Robot | |
| US10525586B2 (en) | Robot | |
| CN104439627B (zh) | 机器人 | |
| JP2016022575A (ja) | ロボット | |
| JP2016022571A (ja) | ロボットの関節機構およびロボット | |
| US20180161991A1 (en) | Robot, robot control device, and robot system | |
| JPH02198782A (ja) | 多関節型ロボット | |
| EP1752265B1 (en) | Manipulator robot | |
| EP2977151A2 (en) | Robot | |
| JP2019217631A (ja) | ロボット、ロボットシステム、ロボットのメンテナンス方法 | |
| US11326737B2 (en) | Robot | |
| US12528205B2 (en) | Wrist device and joint device | |
| JP2025099132A (ja) | 垂直多関節ロボット、および、カバー | |
| JP2016068198A (ja) | ロボット | |
| JP2025033253A (ja) | 連結部材及び連結構造体 | |
| WO2020021863A1 (ja) | ライン接続コネクタ | |
| JP2009125844A (ja) | マニピュレータ型ロボットおよび結線方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20191025 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20201123 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20210428 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20210720 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20210720 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20240620 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20250619 Start annual number: 5 End annual number: 5 |