KR20200057773A - 홀로그램 광 검출 및 거리 측정 시스템 - Google Patents
홀로그램 광 검출 및 거리 측정 시스템 Download PDFInfo
- Publication number
- KR20200057773A KR20200057773A KR1020207012565A KR20207012565A KR20200057773A KR 20200057773 A KR20200057773 A KR 20200057773A KR 1020207012565 A KR1020207012565 A KR 1020207012565A KR 20207012565 A KR20207012565 A KR 20207012565A KR 20200057773 A KR20200057773 A KR 20200057773A
- Authority
- KR
- South Korea
- Prior art keywords
- light
- hologram
- array
- scene
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/22—Processes or apparatus for obtaining an optical image from holograms
- G03H1/2294—Addressing the hologram to an active spatial light modulator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/0017—Devices integrating an element dedicated to another function
- B60Q1/0023—Devices integrating an element dedicated to another function the element being a sensor, e.g. distance sensor, camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
- G01S7/4863—Detector arrays, e.g. charge-transfer gates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/0005—Adaptation of holography to specific applications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/22—Processes or apparatus for obtaining an optical image from holograms
- G03H1/2249—Holobject properties
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/26—Processes or apparatus specially adapted to produce multiple sub- holograms or to obtain images from them, e.g. multicolour technique
- G03H1/2645—Multiplexing processes, e.g. aperture, shift, or wavefront multiplexing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/0005—Adaptation of holography to specific applications
- G03H2001/0033—Adaptation of holography to specific applications in hologrammetry for measuring or analysing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/02—Details of features involved during the holographic process; Replication of holograms without interference recording
- G03H2001/0208—Individual components other than the hologram
- G03H2001/0224—Active addressable light modulator, i.e. Spatial Light Modulator [SLM]
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/22—Processes or apparatus for obtaining an optical image from holograms
- G03H1/2249—Holobject properties
- G03H2001/2263—Multicoloured holobject
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/22—Processes or apparatus for obtaining an optical image from holograms
- G03H1/2249—Holobject properties
- G03H2001/2263—Multicoloured holobject
- G03H2001/2271—RGB holobject
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/22—Processes or apparatus for obtaining an optical image from holograms
- G03H1/2249—Holobject properties
- G03H2001/2284—Superimposing the holobject with other visual information
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/26—Processes or apparatus specially adapted to produce multiple sub- holograms or to obtain images from them, e.g. multicolour technique
- G03H1/2645—Multiplexing processes, e.g. aperture, shift, or wavefront multiplexing
- G03H2001/2655—Time multiplexing, i.e. consecutive records wherein the period between records is pertinent per se
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H1/00—Holographic processes or apparatus using light, infrared or ultraviolet waves for obtaining holograms or for obtaining an image from them; Details peculiar thereto
- G03H1/26—Processes or apparatus specially adapted to produce multiple sub- holograms or to obtain images from them, e.g. multicolour technique
- G03H1/30—Processes or apparatus specially adapted to produce multiple sub- holograms or to obtain images from them, e.g. multicolour technique discrete holograms only
- G03H2001/306—Tiled identical sub-holograms
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H2210/00—Object characteristics
- G03H2210/20—2D object
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H2222/00—Light sources or light beam properties
- G03H2222/10—Spectral composition
- G03H2222/16—Infra Red [IR]
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H2222/00—Light sources or light beam properties
- G03H2222/10—Spectral composition
- G03H2222/17—White light
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H2225/00—Active addressable light modulator
- G03H2225/30—Modulation
- G03H2225/32—Phase only
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H2225/00—Active addressable light modulator
- G03H2225/52—Reflective modulator
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03H—HOLOGRAPHIC PROCESSES OR APPARATUS
- G03H2226/00—Electro-optic or electronic components relating to digital holography
- G03H2226/05—Means for tracking the observer
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Holo Graphy (AREA)
- Optical Modulation, Optical Deflection, Nonlinear Optics, Optical Demodulation, Optical Logic Elements (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Description
도 1은 스크린 상에 홀로그래픽 재구성을 생성하는 반사형 SLM을 나타내는 개략도이다.
도 2a는 예시적인 Gerchberg-Saxton 타입 알고리즘의 첫 번째 반복을 도시한다.
도 2b는 Gerchberg-Saxton 형 알고리즘의 두 번째 및 후속 반복을 도시한다.
도 2c는 Gerchberg-Saxton 형 알고리즘의 대안적인 두 번째 및 후속 반복을 도시한다.
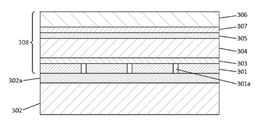
도 3은 반사형 LCOS SLM의 개략도이다.
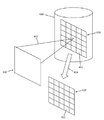
도 4는, 실실예들에 따라, 장면 내의 재생 필드에서 홀로그래픽 재구성을 생성하는 SLM 및 장면 내의 재생 필드의 개별 시야(IFOV)의 어레이로부터의 광을 검출하도록 배열된 어레이 검출기를 포함하는 홀로그램 LIDAR 시스템을 도시하는 개략도이다.
도 5a는, 일 실시예에 따라, 홀로그래픽 스캔의 각각의 제1 및 제2 프레임에 의해 형성된 제1 및 제2 광 풋프린트를 도시하며, 각각의 풋프린트는 장면 내의 재생 필드의 IFOV의 어레이를 조명하기 위한 서브 풋프린트 또는 "광점"의 패턴을 갖는 구조화된 광을 포함하고, 광점들의 형상이 프레임들 사이에서 변경된다;
도 5b는, 다른 실시예 따라, 홀로그래픽 스캔의 각각의 제1 및 제2 프레임에 의해 형성된 제1 및 제2 광 풋프린트를 도시하며, 각각의 풋프린트는 장면 내에서 재생 필드의 IFOV의 어레이의 IFOV의 서브 세트를 조명하기위한 광점 패턴을 갖는 구조화된 광을 포함하고, 여기서, 광점들의 패턴은 IFOV의 상이한 서브 세트를 조명하도록 프레임들 사이에서 변경된다;
도 5c는, 또 다른 실시예에 따라, 도 5b의 실시예와 동등한 제1 및 제2 광 풋프린트를 도시하며, 여기서 광점들의 형상이 프레임들 사이에서 추가로 변경된다;
도 6은, 또 다른 실시예에 따라, 홀로그래픽 스캔의 프레임들의 시퀀스에 의해 형성된 광 풋프린트의 시퀀스를 도시하며, 각각의 풋프린트는 단일 서브-풋프린트(sub-footprint) 또는 "광점(light spot)"을 사용하여 장면 내 재생 필드의 IFOV 어레이의 IFOV를 개별적으로 스캐닝하기 위한 구조화된 광을 포함한다;
도 7은, 다른 실시예에 따라, 홀로그래픽 스캔의 프레임의 시퀀스에 의해 형성된 광 풋프린트의 시퀀스를 도시하며, 각각의 풋프린트는 1 차원 서브-풋프린트 또는 "라인"을 사용하여 장면 내에서 재생 필드의 IFOV를 개별적으로 스캐닝하기 위한 구조화된 광을 포함한다;
도 8은, 또 다른 실시예에 따라, 홀로그래픽 스캔의 대응하는 프레임들에 의해 형성된 n 번째 및 (n + 1)번 째 광 풋프린트를 도시하며, 각각의 풋프린트는 각각의 IFOV에 대한 상이한 서브 풋프린트를 사용하여 장면 내에서 재생 필드의 IFOV의 어레이를 조명하기 위한 구조화된 광을 포함한다;
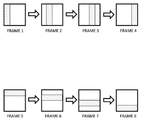
도 9는, 다른 실시예에 따라, 홀로그래픽 스캔의 제1 내지 제5 프레임에 의해 형성된 제1 내지 제5 광 풋프린트를 도시하며, IFOV의 어레이 내의 열(column)에서 열에 대응하는 복수의 IFOV를 조명하기 위해 각각의 풋프린트가 라인의 복수의 광점을 갖는 구조화된 광을 포함하고, 여기서, 광점 라인이 프레임들 사이에서 재배치되는 된다;
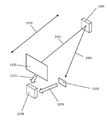
도 10은 홀로그램 프로젝터가 시야를 갖는 검출기의 공간 해상도를 효과적으로 증가시키기 위해 어떻게 사용될 수 있는지를 도시한다.
도 11은 광 검출기로부터 수신된 신호에 기초하여 복수의 컴퓨터 생성 홀로그램을 결정하기 위한 피드백 시스템을 도시한다.
도 12는 각도 확대 시스템의 예를 도시 한 도면이고 ; 그리고
도 13은 실시예들에 따른 물체의 검출 및 범위 결정 방법을 도시한다.
도면에서, 동일한 참조 번호는 동일하거나 유사한 부분을 지칭한다.

Claims (20)
- 장면을 측량하도록 배열된 광 검출 및 거리측정 시스템으로서,
제1 특성을 갖는 광을 출력하도록 배열된 광원;
공간 광 변조기(SLM)로서, 상기 공간 광 변조기에 표시된 컴퓨터 생성 홀로그램에 따라 상기 광원으로부터 광을 수신하고 공간 변조된 광을 출력하도록 배치된 공간 광 변조기;
복수의 컴퓨터 생성 홀로그램을 상기 공간 광 변조기로 출력하도록 구성된 홀로그램 제어기로서, 각각의 컴퓨터 생성 홀로그램은 상기 장면 내의 재생 필드에서 대응하는 패턴을 갖는 구조화된 광을 형성하도록 배열되고, 상기 홀로그램 제어기는 추가로 복수의 컴퓨터 생성 홀로그램 중 적어도 하나에 의해 재생 필드에 형성된 구조화된 광의 패턴을 변경하도록 배열되는, 홀로그램 제어기; 및
장면으로부터 제1 특성을 갖는 광을 수신하고 광 응답 신호를 출력하도록 배열된 광 검출기로서,
광 검출 소자의 어레이, 및
광 검출 요소들의 어레이와 연관된 광학 시스템으로서, 각각의 광 검출 요소가 장면 내의 재생 필드의 각각의 서브-영역으로부터 제1 특성을 갖는 광을 수신하도록 상기 광학 시스템이 배열되는, 광학 시스템을 포함하는 광 검출기
를 포함하는 광 검출 및 거리측정 시스템. - 제1 항에 있어서, 상기 구조화된 광의 패턴은 구조화된 광의 영역 내에서 광 및 광 특징의 형태, 형상 및/또는 패턴을 포함하는 광 검출 및 거리측정 시스템.
- 제1 항 또는 제2 항에 있어서, 복수의 컴퓨터 생성 홀로그램은 순차적으로 공간 광 변조기에 출력되고, 선택적으로 각 홀로그램은 구조화된 광의 패턴을 포함하는 광 풋프린트를 형성하는 광 검출 및 거리측정 시스템.
- 제3 항에 있어서, 상기 복수의 컴퓨터 생성 홀로그램은 제1 컴퓨터 생성 홀로그램 및 제2 컴퓨터 생성 홀로그램을 포함하고, 상기 제1 컴퓨터 생성 홀로그램에 의해 상기 재생 필드에 형성된 구조화된 광의 패턴은 상기 제2 컴퓨터 생성 홀로그램에 의해 재생 필드에서 형성된 구조화된 광의 패턴과 상이한 광 검출 및 거리 측정 시스템.
- 제1 항 내지 제4 항 중 어느 한 항에 있어서, 상기 광학 시스템은 상기 광 검출 소자들의 어레이의 각각의 광 검출 소자가 개별 시야들(IFOV)의 어레이의 개별 시야(IFOV)로부터 반사된 광을 검출하도록 배치되고, 개별 시야들의 어레이는 장면 내의 재생 필드에 대응하고, 선택적으로, 각각의 광 검출 요소는 대응하는 개별 시야에 대한 각각의 광 응답 신호를 출력하도록 배열되는 광 검출 및 거리 측정 시스템.
- 제5 항에 있어서, 상기 복수의 컴퓨터 생성 홀로그램 중 적어도 하나의 컴퓨터 생성 홀로그램에 의해 형성된 구조화된 광은 장면 내의 개별 시야(IFOV)들의 어레이의 개별 시야(IFOV)를 조명하기위한 광점을 포함하는 패턴인 광 검출 및 거리 측정 시스템.
- 제6 항에 있어서, 상기 적어도 하나의 컴퓨터 생성 홀로그램에 의해 형성된 구조화된 광은 복수의 개별 광점을 포함하는 패턴이고, 상기 광점은 서로 공간적으로 분리되고 각각의 광점은 장면 내에서 대응하는 IFOV를 조명하도록 배치되는 광 검출 및 거리 측정 시스템.
- 제7 항에 있어서, 복수의 불연속적 광점은 광점의 어레이를 포함하고, 광점의 개수는 장면 내의 개별 시야들의 어레이의 다수의 개별 시야에 대응하여 모든 개별 시야들이 조명되도록 하는 광 검출 및 거리 측정 시스템.
- 제7 항에 있어서, 상기 복수의 불연속적 광점은 장면 내의 개별 시야들의 어레이에서 개별 시야의 제1 서브 세트를 조명하도록 패턴 또는 어레이로 배열되며, 광점의 개수는 장면 내 개별 시야의 어레이 내 다수의 개별 시야의 개수보다 작은 광 검출 및 거리 측정 시스템.
- 제9 항에 있어서, 개별 시야들의 어레이는 개별 시야들의 행 및 열의 어레이를 포함하고, 광점은 어레이의 각 행 또는 열 내의 모든 n번째 위치에 위치하며, 여기서 n은 1 보다 큰 정수이고, 인접한 행 또는 열의 광점들은 서로에 대해 오프셋 되며, 선택적으로 복수의 불연속적 광점들 체커보드 패턴으로 배열되는 광 검출 및 거리 측정 시스템.
- 제 9 항 또는 제10 항에 있어서, 상기 홀로그램 제어기는 복수의 개별적인 홀로그램에 의해 형성된 상기 적어도 하나의 컴퓨터 생성 홀로그램에 의해 형성된 구조화된 광의 어레이 내 광점 중 적어도 하나를 재배치하도록 배열되어 장면 내의 개별 시야들의 어레이에서 개별 시야의 제2 서브 세트를 조명하기 위해 적어도 하나의 다른 컴퓨터 생성 홀로그램에 의해 형성된 구조화된 광의 어레이의 상이한 패턴 내에 복수의 불연속적 광점을 제공하고, 상기 제1 서브 세트는 상기 제2 서브 세트와 상이한 광 검출 및 거리 측정 시스템.
- 제7 항 내지 제11 항 중 어느 한 항에 있어서, 상기 홀로그램 제어기는 상기 적어도 하나의 컴퓨터 생성에 의해 형성된 구조화된 광의 복수의 광점 중 적어도 하나의 광점의 형상을 변경 시키도록 배열되어 적어도 하나의 다른 컴퓨터 생성 홀로그램에 의해 형성된 구조화된 광 내에 적어도 하나의 상이한 형상의 광점을 제공하는 광 검출 및 거리 측정 시스템.
- 제5 항에 있어서, 각각의 컴퓨터 생성 홀로그램은 구조화된 광을 포함하는 광 풋프린트를 형성하도록 배열되고, 제1 컴퓨터 생성 홀로그램에 의해 시퀀스로 형성된 광 풋프린트는 장면 내 IFOV 내 제1위치에 서브 풋프린트를 제공하고, 상기 홀로그램 제어기는 각각의 연속 홀로그램에 의해 시퀀스로 제공되는 개별 시야 내에 서브 풋프린트를 재배치하도록 배열되는 광 검출 및 거리 측정 시스템.
- 제13 항에 있어서,
1 차원 또는 2 차원 형상을 갖는 불연속적 광 영역을 포함하는 서브 풋프린트;
홀로그램 제어기에 의해 출력된 컴퓨터 생성 홀로그램의 시퀀스로서, 서브 풋프린트를 개별 시야 내의 복수의 상이한 위치로 이동시켜 그 전체 영역을 스캔하고, 선택적으로, 상기 서브 풋프린트를 상기 개별 시야 내의 복수의 상이한 위치들로 재배치하는 컴퓨터 생성 홀로그램의 시퀀스 내 각각의 컴퓨터 생성 홀로그램에 의해 형성된 광 풋프린트는 상기 장면 내에서 상기 개별 시야들의 어레이의 하나 이상의 개별 시야 내의 위치들에 선택적으로 조명하기 위하여 하나 이상의 추가적인 서브 풋프린트를 포함하는, 컴퓨터 생성 홀로그램의 시퀀스; 및
개별 시야로서, 상기 개별 시야는 광 풋프린트에 의해 개별 시야의 이전의 조명에 응답하여 수신된 피드백에 기초하여 선택되는 개별 시야
중 하나 이상을 포함하는 광 검출 및 거리 측정 시스템. - 제5 항 내지 제14 항 중 어느 한 항에 있어서, 광 감지 요소들의 어레이의 각각의 광 감지 요소 및 상기 장면 내의 개별 시야들의 어레이의 개별 시야 사이에는 일대일 상관 관계가 있는 광 검출 및 거리 측정 시스템.
- 제5 항 내지 제15 항 중 어느 한 항에 있어서, 상기 광 검출기는 :
전하 결합 장치("CCD") 소자의 어레이, 또는
단일 광자 애벌랜치 다이오드("SPAD") 광 검출 소자의 어레이와 같은 저해상도 광 검출 소자의 어레이를 포함하는 광 검출 및 거리 측정 시스템. - 제1 항 내지 제16 항 중 어느 한 항에 있어서, 복수의 컴퓨터 생성 홀로그램의 제1 컴퓨터 생성 홀로그램에 대응하는 제1 공간적으로 변조된 광의 출력과 물체로부터 반사된 제1 공간적으로 변조된 광을 검출하는 것 사이의 시간 차이를 포함하는 전달 시간 측정을 수행함으로써, 상기 광 검출 및 거리 측정 시스템으로부터 장면 내 물체까지의 거리를 결정하도록 배치되는 프로세서를 더 포함하는 광 검출 및 거리 측정 시스템.
- 제1 항 내지 제17 항 중 어느 한 항에 있어서, 상기 SLM 및 상기 광 검출기 중 적어도 하나는 휴대용 장치 또는 차량의 램프 유닛 내에 위치되는 광 검출 및 거리 측정 시스템.
- 제1 항 내지 제17 항 중 어느 한 항의 광 검출 및 거리 측정 시스템을 포함하는 램프 유닛.
- 제1 항 내지 제17 항 중 어느 한 항의 광 검출 및 거리 측정 시스템 을 포함하는 차량.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1808623.1 | 2018-05-25 | ||
| GB1808623.1A GB2574058B (en) | 2018-05-25 | 2018-05-25 | Holographic light detection and ranging |
| PCT/EP2019/062373 WO2019224052A1 (en) | 2018-05-25 | 2019-05-14 | Holographic light detection and ranging |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200057773A true KR20200057773A (ko) | 2020-05-26 |
| KR102401671B1 KR102401671B1 (ko) | 2022-05-26 |
Family
ID=62812395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207012565A Active KR102401671B1 (ko) | 2018-05-25 | 2019-05-14 | 홀로그램 광 검출 및 거리 측정 시스템 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11921207B2 (ko) |
| EP (1) | EP3662329B8 (ko) |
| JP (1) | JP7059369B2 (ko) |
| KR (1) | KR102401671B1 (ko) |
| CN (1) | CN111295624B (ko) |
| GB (1) | GB2574058B (ko) |
| PL (1) | PL3662329T3 (ko) |
| WO (1) | WO2019224052A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220017823A (ko) * | 2020-08-05 | 2022-02-14 | 엔비직스 엘티디 | 홀로그래픽 핑거프린트 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11698441B2 (en) * | 2019-03-22 | 2023-07-11 | Viavi Solutions Inc. | Time of flight-based three-dimensional sensing system |
| GB2582370B (en) | 2019-03-22 | 2022-11-02 | Dualitas Ltd | Holographic projector |
| GB2578523B (en) | 2019-09-25 | 2021-08-11 | Dualitas Ltd | Holographic projection |
| GB2587400B (en) | 2019-09-27 | 2022-02-16 | Dualitas Ltd | Hologram display using a liquid crystal display device |
| GB2590621B (en) * | 2019-12-20 | 2022-05-25 | Dualitas Ltd | A projector for forming images on multiple planes |
| CN111123284B (zh) * | 2019-12-26 | 2022-02-11 | 宁波飞芯电子科技有限公司 | 探测方法及探测设备 |
| US11940758B2 (en) * | 2020-02-19 | 2024-03-26 | Envisics Ltd | Light detection and ranging |
| GB2592213B (en) | 2020-02-19 | 2023-05-03 | Envisics Ltd | Light detection and ranging |
| WO2021166523A1 (ja) * | 2020-02-21 | 2021-08-26 | ソニーセミコンダクタソリューションズ株式会社 | 距離測定装置及び距離測定方法 |
| JP6934083B1 (ja) * | 2020-04-08 | 2021-09-08 | 浜松ホトニクス株式会社 | レーザ加工装置及びレーザ加工方法 |
| EP4156866B1 (en) * | 2020-05-18 | 2025-08-06 | Sony Group Corporation | Lighting device, lighting method, and projector device |
| GB2596111B (en) * | 2020-06-18 | 2023-03-22 | Dualitas Ltd | Frame rate synchronization |
| GB2597929B (en) | 2020-08-05 | 2024-02-14 | Envisics Ltd | Light detection and ranging |
| GB2597930B (en) * | 2020-08-05 | 2024-02-14 | Envisics Ltd | Light detection and ranging |
| GB2597928B (en) * | 2020-08-05 | 2024-09-25 | Envisics Ltd | Light detection and ranging |
| GB2597771B (en) * | 2020-08-05 | 2024-02-07 | Envisics Ltd | Holographic light detection and ranging |
| EP4315843A1 (en) * | 2021-03-25 | 2024-02-07 | Dolby Laboratories Licensing Corporation | Projection system and method of driving a projection system with field mapping |
| CN114236496B (zh) * | 2021-10-28 | 2025-05-16 | 深圳阜时科技有限公司 | 发射模组、光学检测装置及电子设备 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170003392A1 (en) * | 2015-07-02 | 2017-01-05 | Texas Instruments Incorporated | Methods and Apparatus for LIDAR with DMD |
| EP3165815A1 (en) * | 2012-02-07 | 2017-05-10 | Two Trees Photonics Limited | A light detection and ranging sytem lidar as part of collision avoidance system with a phase modulator |
| KR20180052357A (ko) * | 2016-11-10 | 2018-05-18 | 삼성전자주식회사 | 확장된 시야창을 제공하는 홀로그래픽 디스플레이 장치 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006268960A (ja) * | 2005-03-24 | 2006-10-05 | Fujitsu Ltd | ホログラム記録再生装置 |
| WO2007049336A1 (ja) * | 2005-10-25 | 2007-05-03 | Fujitsu Limited | ホログラム記録装置 |
| GB2438458A (en) | 2006-05-11 | 2007-11-28 | Univ Cambridge Tech | Blocking zero-order light in phase shift hologram generation |
| GB2498170B (en) | 2011-10-26 | 2014-01-08 | Two Trees Photonics Ltd | Frame inheritance |
| WO2013080163A1 (en) * | 2011-12-02 | 2013-06-06 | Csir | Material analysis system, method and device |
| GB2501112B (en) | 2012-04-12 | 2014-04-16 | Two Trees Photonics Ltd | Phase retrieval |
| US9019576B2 (en) * | 2013-06-21 | 2015-04-28 | 3Shape A/S | Scanning apparatus with patterned probe light |
| JP6531326B2 (ja) | 2015-03-10 | 2019-06-19 | アルプスアルパイン株式会社 | 光学式検知装置 |
| US20180339645A1 (en) * | 2016-06-03 | 2018-11-29 | Faraday&Future Inc. | Automatic adaptive headlight control |
| WO2018134619A1 (en) * | 2017-01-19 | 2018-07-26 | Envisics Ltd. | Holographic light detection and ranging |
| GB2560491B (en) | 2017-01-19 | 2020-08-19 | Envisics Ltd | Holographic light detection and ranging |
| GB2561528B (en) * | 2017-01-19 | 2020-08-12 | Envisics Ltd | Holographic Light Detection and ranging |
| US10830879B2 (en) * | 2017-06-29 | 2020-11-10 | Apple Inc. | Time-of-flight depth mapping with parallax compensation |
-
2018
- 2018-05-25 GB GB1808623.1A patent/GB2574058B/en active Active
-
2019
- 2019-05-14 US US16/759,963 patent/US11921207B2/en active Active
- 2019-05-14 WO PCT/EP2019/062373 patent/WO2019224052A1/en not_active Ceased
- 2019-05-14 JP JP2020523773A patent/JP7059369B2/ja active Active
- 2019-05-14 KR KR1020207012565A patent/KR102401671B1/ko active Active
- 2019-05-14 PL PL19724467.6T patent/PL3662329T3/pl unknown
- 2019-05-14 EP EP19724467.6A patent/EP3662329B8/en active Active
- 2019-05-14 CN CN201980005527.4A patent/CN111295624B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3165815A1 (en) * | 2012-02-07 | 2017-05-10 | Two Trees Photonics Limited | A light detection and ranging sytem lidar as part of collision avoidance system with a phase modulator |
| US20170003392A1 (en) * | 2015-07-02 | 2017-01-05 | Texas Instruments Incorporated | Methods and Apparatus for LIDAR with DMD |
| KR20180052357A (ko) * | 2016-11-10 | 2018-05-18 | 삼성전자주식회사 | 확장된 시야창을 제공하는 홀로그래픽 디스플레이 장치 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220017823A (ko) * | 2020-08-05 | 2022-02-14 | 엔비직스 엘티디 | 홀로그래픽 핑거프린트 |
Also Published As
| Publication number | Publication date |
|---|---|
| GB2574058B (en) | 2021-01-13 |
| KR102401671B1 (ko) | 2022-05-26 |
| JP7059369B2 (ja) | 2022-04-25 |
| GB2574058A (en) | 2019-11-27 |
| WO2019224052A1 (en) | 2019-11-28 |
| PL3662329T3 (pl) | 2023-01-09 |
| US20210072379A1 (en) | 2021-03-11 |
| JP2021505846A (ja) | 2021-02-18 |
| CN111295624A (zh) | 2020-06-16 |
| US11921207B2 (en) | 2024-03-05 |
| EP3662329A1 (en) | 2020-06-10 |
| GB201808623D0 (en) | 2018-07-11 |
| EP3662329B1 (en) | 2022-09-21 |
| EP3662329B8 (en) | 2022-10-26 |
| CN111295624B (zh) | 2024-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102401671B1 (ko) | 홀로그램 광 검출 및 거리 측정 시스템 | |
| US11782133B2 (en) | Holographic light detection and ranging | |
| US20220043153A1 (en) | Light Detection and Ranging | |
| GB2560490A (en) | Holographic light detection and ranging | |
| US12504713B2 (en) | Light detection and ranging | |
| US20230266447A1 (en) | Light Detection and Ranging | |
| US12455534B2 (en) | Light detection and ranging | |
| CN116601516B (zh) | 全息光检测和测距 | |
| GB2586551A (en) | Holographic light detection and ranging | |
| GB2586552A (en) | Holographic light detection and ranging | |
| GB2560491A (en) | Holographic light detection and ranging | |
| GB2561528A (en) | Holographic Light Detection and ranging | |
| HK40007821B (en) | Holographic light detection and ranging |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200429 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20210806 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20220422 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220520 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220523 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |