KR20200058642A - 차량 및 그 제어 방법 - Google Patents
차량 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20200058642A KR20200058642A KR1020180142492A KR20180142492A KR20200058642A KR 20200058642 A KR20200058642 A KR 20200058642A KR 1020180142492 A KR1020180142492 A KR 1020180142492A KR 20180142492 A KR20180142492 A KR 20180142492A KR 20200058642 A KR20200058642 A KR 20200058642A
- Authority
- KR
- South Korea
- Prior art keywords
- information
- obstacle
- vehicle
- unit
- pedal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangement or mounting of propulsion-unit control devices in vehicles
- B60K26/02—Arrangement or mounting of propulsion-unit control devices in vehicles of initiating means or elements
- B60K26/021—Arrangement or mounting of propulsion-unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- G06K9/00597—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2220/00—Monitoring, detecting driver behaviour; Signalling thereof; Counteracting thereof
- B60T2220/04—Pedal travel sensor, stroke sensor; Sensing brake request
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/05—Type of road, e.g. motorways, local streets, paved or unpaved roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/50—Barriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2302/00—Responses or measures related to driver conditions
- B60Y2302/03—Actuating a signal or alarm device
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/306—Pressure sensors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Ophthalmology & Optometry (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
Abstract
Description
도 2는 실시 예에 따른 차량의 제어 구성도이다.
도 3은 실시 예에 따른 차량의 제어부의 상세 구성도이다.
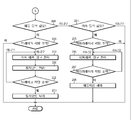
도 4a 및 4b는 실시 예에 따른 차량의 제어 순서도이다.
도 5는 실시 예에 따른 차량의 제어 순서를 설명하는 각 구성부의 동작 타이밍 예시도이다.
112: 브레이크 페달 113: 액셀러레이터 페달
120: 주행 상황 정보 획득부 130: 의도 정보 획득부
Claims (23)
- 주행 상황에 대응하는 정보를 획득하는 주행 상황 정보 획득부;
운전자의 의도에 대응하는 정보를 획득하는 의도 정보 획득부; 및
상기 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고, 상기 장애물과의 위치 정보에 기초하여 상기 장애물과 충돌 위험이 존재하는지 판단하고, 상기 장애물과 충돌 위험이 존재한다고 판단되면 상기 장애물의 위치 정보에 기초하여 필요 동작을 판단하고, 상기 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고, 상기 판단된 운전자의 페달 조작의도와 상기 판단된 필요 동작이 상이하면 페달 오조작으로 판단하는 제어부; 및
상기 페달 오조작에 대응하는 경고를 출력하는 사운드 출력부를 포함하는 차량. - 제 1항에 있어서,
상기 주행 상황 획득부는, 상기 장애물과의 거리에 대한 정보를 검출하는 거리 검출부와, 주행 속도를 검출하는 속도 검출부를 포함하고,
상기 제어부는, 상기 장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나를 획득하고 상기 획득된 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나에 기초하여 상기 장애물과 출동 위험이 존재하는지 판단하는 것을 포함하는 차량. - 제 1 항에 있어서,
상기 주행 상황 획득부는, 상기 장애물과의 거리에 대한 정보를 검출하는 거리 검출부와, 주행 속도를 검출하는 속도 검출부를 포함하고,
상기 제어부는, 상기 장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간을 획득하고 상기 획득된 장애물과의 상대 거리에 대응하는 위험도, 상기 획득된 상대 속도에 대응하는 위험도 및 상기 획득된 충돌 예상 시간에 대응하는 위험도 중 적어도 하나에 기초하여 상기 장애물과 출동 위험이 존재하는지 판단하는 것을 포함하는 차량. - 제 3 항에 있어서,
상기 주행 상황 획득부는, 현재 위치에 대한 위치 정보를 수신하는 위치 수신부를 더 포함하고,
상기 제어부는, 상기 수신된 위치 정보에 대응하는 도로의 종류를 확인하고 확인된 도로의 종류에 대응하는 가중치를 확인하고, 상기 확인된 가중치에 기초하여 상기 적어도 하나의 위험도를 조정하는 것을 더 포함하는 차량. - 제 1 항에 있어서,
상기 의도 정보 획득부는, 브레이크 페달에 인가된 압력을 검출하는 제1가압 검출부와, 액셀러레이터 페달에 인가된 압력을 검출하는 제2가압 검출부를 포함하고,
상기 제어부는, 상기 제1가압 검출부 및 상기 제2가압 검출부 중 어느 하나로부터 압력 정보가 수신되면 상기 운전자의 페달 조작 의도로 판단하는 것을 포함하는 차량. - 제 5 항에 있어서, 상기 제어부는,
상기 판단된 필요 동작이 제동 동작일 때 상기 제2가압 검출부로부터 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어하는 것을 포함하는 차량. - 제 5 항에 있어서, 상기 제어부는,
상기 판단된 필요 동작이 제동 동작일 때 상기 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하는 것을 포함하는 차량. - 제 7 항에 있어서, 상기 제어부는,
상기 액셀러레이터 페달의 동작 모드를 전환 제어 중, 상기 제1가압 검출부로부터 압력 정보가 수신되면 상기 액셀러레이터 페달의 동작 모드를 복귀 제어하여 가속 제어가 수행되도록 하는 것을 포함하는 차량. - 제 5 항에 있어서, 상기 제어부는,
상기 판단된 필요 동작이 가속 동작일 때 상기 제1가압 검출부로부터 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하는 것을 포함하는 차량. - 제 9 항에 있어서, 상기 제어부는,
상기 제동력을 제한 제어 중, 상기 제2가압 검출부로부터 압력 정보가 수신되면 제동력의 제한 해제 제어를 수행하는 것을 포함하는 차량. - 제 1 항에 있어서,
상기 의도 정보 획득부는, 스티어링 휠의 조향각을 검출하는 조향각 검출부를 포함하고,
상기 제어부는, 상기 장애물과 충돌 위험이 존재할 때 상기 조향각 검출부를 통해 조향각 정보가 수신되면 운전자의 회피 의도가 존재한다고 판단하는 것을 포함하는 차량. - 제 1 항에 있어서,
상기 의도 정보 획득부는, 상기 운전자의 영상을 획득하는 영상 획득부를 포함하고,
상기 제어부는, 상기 운전자의 영상에서 운전자의 눈을 인식하고 인식된 눈의 위치에 기초하여 운전자가 집중 상태인지를 판단하고, 운전자가 집중 상태라고 판단되면 페달 조작 의도를 판단하는 것을 포함하는 차량. - 제 1 항에 있어서,
상기 페달 오조작에 대응하는 경고를 출력하는 표시부를 더 포함하는 차량. - 주행 상황에 대응하는 정보를 획득하는 주행 상황 정보 획득부;
운전자의 의도에 대응하는 정보를 획득하는 의도 정보 획득부; 및
상기 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고, 상기 장애물과의 위치 정보에 기초하여 상기 장애물과 충돌 위험이 존재하는지 판단하고, 상기 장애물과 충돌 위험이 존재한다고 판단되면 상기 장애물의 위치 정보에 기초하여 필요 동작을 판단하고, 상기 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고, 상기 판단된 운전자의 페달 조작의도와 상기 판단된 필요 동작이 상이하면 상기 운전자에 의해 조작된 페달에 의해 발생되는 출력을 제한 제어하는 제어부를 포함하는 차량. - 제 14 항에 있어서,
상기 의도 정보 획득부는, 브레이크 페달에 인가된 압력을 검출하는 제1가압 검출부와, 액셀러레이터 페달에 인가된 압력을 검출하는 제2가압 검출부를 포함하고,
상기 제어부는, 상기 제1가압 검출부 및 상기 제2가압 검출부 중 어느 하나로부터 압력 정보가 수신되면 상기 운전자의 페달 조작 의도로 판단하는 것을 포함하는 차량. - 제 15 항에 있어서, 상기 제어부는,
상기 판단된 필요 동작이 제동 동작일 때 상기 제2가압 검출부로부터 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어하는 것을 포함하는 차량. - 제 15 항에 있어서, 상기 제어부는,
상기 판단된 필요 동작이 제동 동작일 때 상기 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하고, 상기 액셀러레이터 페달의 동작 모드를 전환 제어 중, 상기 제1가압 검출부로부터 압력 정보가 수신되면 상기 액셀러레이터 페달의 동작 모드를 복귀 제어하여 가속 제어가 수행되도록 하는 것을 포함하는 차량. - 제 15 항에 있어서, 상기 제어부는,
상기 판단된 필요 동작이 가속 동작일 때 상기 제1가압 검출부로부터 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하고, 상기 제동력을 제한 제어 중, 상기 제2가압 검출부로부터 압력 정보가 수신되면 제동력의 제한 해제 제어를 수행하는 것을 포함하는 차량. - 주행 상황 정보 획득부에서 획득된 정보에 기초하여 장애물의 위치 정보를 획득하고,
상기 장애물과의 위치 정보에 기초하여 상기 장애물과 충돌 위험이 존재하는지 판단하고,
상기 장애물과 충돌 위험이 존재한다고 판단되면 상기 장애물의 위치 정보에 기초하여 필요 동작을 판단하고,
상기 의도 정보 획득부에서 획득된 정보에 기초하여 운전자의 페달 조작 의도를 판단하고,
상기 판단된 필요 동작이 제동 동작일 때 액셀러레이터 페달의 압력 정보가 수신되면 가속량을 미리 설정된 비율만큼 제한 제어하고,
상기 판단된 필요 동작이 가속 동작일 때 브레이크 페달의 압력 정보가 수신되면 제동력을 미리 설정된 비율만큼 제한 제어하고,
상기 판단된 운전자의 페달 조작의도와 상기 판단된 필요 동작이 상이하면 페달 오조작에 대응하는 경고를 출력하는 것을 포함하는 차량의 제어 방법. - 제 19 항에 있어서,
상기 판단된 필요 동작이 제동 동작일 때 상기 액셀러레이터 페달의 동작 모드를 전환 제어하여 제동력이 발생되도록 하는 것을 더 포함하는 차량의 제어 방법. - 제 19 항에 있어서, 상기 장애물과 출동 위험이 존재하는지 판단하는 것은,
장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나를 획득하고,
상기 획득된 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간 중 적어도 하나에 기초하여 상기 장애물과 출동 위험이 존재하는지 판단하는 것을 포함하는 차량의 제어 방법. - 제 19 항에 있어서, 상기 장애물과 출동 위험이 존재하는지 판단하는 것은,
차량의 현재의 위치 정보에 대응하는 도로의 종류를 확인하고,
상기 확인된 도로의 종류에 대응하는 가중치를 확인하고,
장애물과의 거리와 주행 속도에 기초하여 상기 장애물과의 상대 거리, 상대 속도 및 충돌 예상 시간을 획득하고,
상기 획득된 장애물과의 상대 거리에 대응하는 위험도, 상기 획득된 상대 속도에 대응하는 위험도 및 상기 획득된 충돌 예상 시간에 대응하는 위험도 중 적어도 하나를 확인하고,
상기 확인된 가중치에 기초하여 상기 확인된 적어도 위험도를 조정하는 것을 포함하는 차량의 제어 방법. - 제 19 항에 있어서, 상기 경고를 출력하는 것은,
사운드, 메시지 및 진동 중 적어도 하나를 출력하는 것을 포함하는 차량의 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180142492A KR102712223B1 (ko) | 2018-11-19 | 2018-11-19 | 차량 및 그 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180142492A KR102712223B1 (ko) | 2018-11-19 | 2018-11-19 | 차량 및 그 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200058642A true KR20200058642A (ko) | 2020-05-28 |
| KR102712223B1 KR102712223B1 (ko) | 2024-10-07 |
Family
ID=70920236
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180142492A Active KR102712223B1 (ko) | 2018-11-19 | 2018-11-19 | 차량 및 그 제어 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102712223B1 (ko) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112721939A (zh) * | 2021-01-15 | 2021-04-30 | 南京航空航天大学 | 一种基于多传感器融合的驾驶员制动意图识别方法 |
| CN113753017A (zh) * | 2020-06-02 | 2021-12-07 | 现代自动车株式会社 | 混合动力电动车辆及其避免碰撞的控制方法 |
| CN114103635A (zh) * | 2021-12-08 | 2022-03-01 | 安徽江淮汽车集团股份有限公司 | 车辆防误踩油门方法及系统 |
| CN114274791A (zh) * | 2022-01-07 | 2022-04-05 | 江铃汽车股份有限公司 | 一种纯电动汽车行驶方向前进与倒退切换的扭矩控制方法 |
| CN114734994A (zh) * | 2020-12-24 | 2022-07-12 | 上海汽车集团股份有限公司 | 制动信号处理方法及装置 |
| CN115179931A (zh) * | 2022-07-20 | 2022-10-14 | 重庆长安汽车股份有限公司 | 车辆的自动制动方法、装置、车辆及存储介质 |
| CN116198514A (zh) * | 2022-12-09 | 2023-06-02 | 合众新能源汽车股份有限公司 | 一种车辆加速踏板的误踩防范方法及装置 |
| JP2023090145A (ja) * | 2021-12-17 | 2023-06-29 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法及びプログラム |
| CN116587881A (zh) * | 2023-04-26 | 2023-08-15 | 宇通客车股份有限公司 | 一种新能源车辆及其能量管理控制方法、系统 |
| CN118494424A (zh) * | 2024-07-08 | 2024-08-16 | 深圳市云天智能终端有限公司 | 一种汽车电动踏板控制系统 |
| CN120056898A (zh) * | 2025-03-07 | 2025-05-30 | 奇瑞汽车股份有限公司 | 汽车主被动安全一体化域控制方法及装置 |
| CN120096588A (zh) * | 2025-03-21 | 2025-06-06 | 长城汽车股份有限公司 | 一种车辆控制方法、车辆和存储介质 |
| US12454261B2 (en) * | 2022-03-28 | 2025-10-28 | Honda Motor Co., Ltd. | Rapid acceleration suppression device and rapid acceleration suppression control method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006123711A (ja) * | 2004-10-28 | 2006-05-18 | Mitsubishi Motors Corp | 車両の安全制御装置 |
| KR20150018154A (ko) * | 2013-08-09 | 2015-02-23 | 현대모비스 주식회사 | 차량 제어 시스템 및 방법 |
| US20150345964A1 (en) * | 2014-05-30 | 2015-12-03 | Denso Corporation | Evacuation travelling assistance apparatus |
| JP2018047737A (ja) * | 2016-09-20 | 2018-03-29 | 日産自動車株式会社 | 運転者意図特定方法及び運転者意図特定装置 |
| KR20180072139A (ko) * | 2016-12-21 | 2018-06-29 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
-
2018
- 2018-11-19 KR KR1020180142492A patent/KR102712223B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006123711A (ja) * | 2004-10-28 | 2006-05-18 | Mitsubishi Motors Corp | 車両の安全制御装置 |
| KR20150018154A (ko) * | 2013-08-09 | 2015-02-23 | 현대모비스 주식회사 | 차량 제어 시스템 및 방법 |
| US20150345964A1 (en) * | 2014-05-30 | 2015-12-03 | Denso Corporation | Evacuation travelling assistance apparatus |
| JP2018047737A (ja) * | 2016-09-20 | 2018-03-29 | 日産自動車株式会社 | 運転者意図特定方法及び運転者意図特定装置 |
| KR20180072139A (ko) * | 2016-12-21 | 2018-06-29 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113753017A (zh) * | 2020-06-02 | 2021-12-07 | 现代自动车株式会社 | 混合动力电动车辆及其避免碰撞的控制方法 |
| CN113753017B (zh) * | 2020-06-02 | 2026-04-03 | 现代自动车株式会社 | 混合动力电动车辆及其避免碰撞的控制方法 |
| CN114734994A (zh) * | 2020-12-24 | 2022-07-12 | 上海汽车集团股份有限公司 | 制动信号处理方法及装置 |
| CN112721939A (zh) * | 2021-01-15 | 2021-04-30 | 南京航空航天大学 | 一种基于多传感器融合的驾驶员制动意图识别方法 |
| CN114103635A (zh) * | 2021-12-08 | 2022-03-01 | 安徽江淮汽车集团股份有限公司 | 车辆防误踩油门方法及系统 |
| JP2023090145A (ja) * | 2021-12-17 | 2023-06-29 | トヨタ自動車株式会社 | 運転支援装置、運転支援方法及びプログラム |
| CN114274791A (zh) * | 2022-01-07 | 2022-04-05 | 江铃汽车股份有限公司 | 一种纯电动汽车行驶方向前进与倒退切换的扭矩控制方法 |
| CN114274791B (zh) * | 2022-01-07 | 2023-12-12 | 江铃汽车股份有限公司 | 一种纯电动汽车行驶方向前进与倒退切换的扭矩控制方法 |
| US12454261B2 (en) * | 2022-03-28 | 2025-10-28 | Honda Motor Co., Ltd. | Rapid acceleration suppression device and rapid acceleration suppression control method |
| CN115179931A (zh) * | 2022-07-20 | 2022-10-14 | 重庆长安汽车股份有限公司 | 车辆的自动制动方法、装置、车辆及存储介质 |
| CN116198514A (zh) * | 2022-12-09 | 2023-06-02 | 合众新能源汽车股份有限公司 | 一种车辆加速踏板的误踩防范方法及装置 |
| CN116587881A (zh) * | 2023-04-26 | 2023-08-15 | 宇通客车股份有限公司 | 一种新能源车辆及其能量管理控制方法、系统 |
| CN116587881B (zh) * | 2023-04-26 | 2025-09-23 | 宇通客车股份有限公司 | 一种新能源车辆及其能量管理控制方法、系统 |
| CN118494424B (zh) * | 2024-07-08 | 2024-12-10 | 深圳市云天智能终端有限公司 | 一种汽车电动踏板控制系统 |
| CN118494424A (zh) * | 2024-07-08 | 2024-08-16 | 深圳市云天智能终端有限公司 | 一种汽车电动踏板控制系统 |
| CN120056898A (zh) * | 2025-03-07 | 2025-05-30 | 奇瑞汽车股份有限公司 | 汽车主被动安全一体化域控制方法及装置 |
| CN120096588A (zh) * | 2025-03-21 | 2025-06-06 | 长城汽车股份有限公司 | 一种车辆控制方法、车辆和存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102712223B1 (ko) | 2024-10-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102712223B1 (ko) | 차량 및 그 제어 방법 | |
| KR102588920B1 (ko) | 운전자 보조 시스템, 그를 가지는 차량 및 그 제어 방법 | |
| KR102797059B1 (ko) | 차량 및 그 제어 방법 | |
| KR102715606B1 (ko) | 운전자 보조 시스템, 그를 가지는 차량 및 그 제어 방법 | |
| CN112706763B (zh) | 车辆及控制该车辆的方法 | |
| KR102873464B1 (ko) | 운전자 보조 시스템, 그를 가지는 차량 및 그 제어 방법 | |
| KR102367952B1 (ko) | 비전 시스템, 그를 가지는 차량 및 그 제어 방법 | |
| JP4309843B2 (ja) | 車両の衝突を阻止する方法および装置 | |
| US20210197824A1 (en) | Advanced driver assistance system, vehicle having the same and method for controlling the vehicle | |
| US11104348B2 (en) | Vehicle alarm apparatus | |
| KR20200098774A (ko) | 차량 및 그 제어 방법 | |
| US20220289176A1 (en) | Advanced driver assistance system and vehicle having the same | |
| KR20220144003A (ko) | 운전자 보조 시스템 및 그를 가지는 차량 | |
| JP2017027292A (ja) | 車両制御装置 | |
| KR20240006732A (ko) | 운전자 보조 시스템 및 그를 가지는 차량 | |
| KR102367959B1 (ko) | 운전 보조 표시 장치, 그를 가지는 차량 및 그 제어 방법 | |
| KR20190066114A (ko) | 차량 및 그 제어방법 | |
| JP2009151566A (ja) | 車両用表示装置 | |
| CN116691672A (zh) | 驾驶员辅助系统以及驾驶员辅助方法 | |
| JP2006301842A (ja) | 車両の運転支援装置 | |
| KR20230020030A (ko) | 운전자 보조 장치 및 그를 가지는 차량 | |
| US20240278776A1 (en) | Method and apparatus for collision avoidance or impact force reduction | |
| JP2017151704A (ja) | 自動運転装置 | |
| KR102705886B1 (ko) | 운전자 보조 시스템 및 그를 가지는 차량 | |
| KR20230172054A (ko) | 차량 충돌 방지 시스템 및 이를 구비한 차량 및 충돌 방지 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181119 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20211117 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20181119 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20240314 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240924 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240926 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240927 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |