KR20200061664A - 플러그인 하이브리드 자동차 및 그를 위한 충전 제어 방법 - Google Patents
플러그인 하이브리드 자동차 및 그를 위한 충전 제어 방법 Download PDFInfo
- Publication number
- KR20200061664A KR20200061664A KR1020180147230A KR20180147230A KR20200061664A KR 20200061664 A KR20200061664 A KR 20200061664A KR 1020180147230 A KR1020180147230 A KR 1020180147230A KR 20180147230 A KR20180147230 A KR 20180147230A KR 20200061664 A KR20200061664 A KR 20200061664A
- Authority
- KR
- South Korea
- Prior art keywords
- charging
- battery state
- hybrid vehicle
- engine
- departure time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/24—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/28—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the electric energy storing means, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/442—Series-parallel switching type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/15—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with additional electric power supply
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/62—Monitoring or controlling charging stations in response to charging parameters, e.g. current, voltage or electrical charge
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/63—Monitoring or controlling charging stations in response to network capacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/64—Optimising energy costs, e.g. responding to electricity rates
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/11—Controlling the power contribution of each of the prime movers to meet required power demand using model predictive control [MPC] strategies, i.e. control methods based on models predicting performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18054—Propelling the vehicle related to particular drive situations at stand still, e.g. engine in idling state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/80—Time limits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/14—Driver interactions by input of vehicle departure time
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/54—Energy consumption estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
- B60W2710/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/91—Battery charging
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y02T10/7044—
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
- Y02T90/167—Systems integrating technologies related to power network operation and communication or information technologies for supporting the interoperability of electric or hybrid vehicles, i.e. smartgrids as interface for battery charging of electric vehicles [EV] or hybrid vehicles [HEV]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S10/00—Systems supporting electrical power generation, transmission or distribution
- Y04S10/12—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation
- Y04S10/126—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation the energy generation units being or involving electric vehicles [EV] or hybrid vehicles [HEV], i.e. power aggregation of EV or HEV, vehicle to grid arrangements [V2G]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S30/00—Systems supporting specific end-user applications in the sector of transportation
- Y04S30/10—Systems supporting the interoperability of electric or hybrid vehicles
- Y04S30/14—Details associated with the interoperability, e.g. vehicle recognition, authentication, identification or billing
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
Description
도 2는 일반적인 하이브리드 자동차의 주행 모드와 효율 특성을 나타낸다.
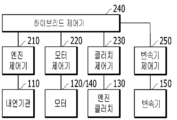
도 3은 본 발명의 실시예들이 적용될 수 있는 하이브리드 자동차의 제어 계통의 일례를 나타내는 블럭도이다.
도 4는 본 발명의 일 실시예에 따른 예약 충전을 수행하기 위한 시스템 구성의 일례를 나타낸다.
도 5는 본 발명의 일 실시예에 따른 하이브리드 자동차에서 초기 충전 시각에 따른 충전 스케쥴의 일례를 나타낸다.
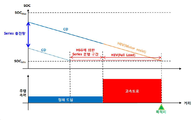
도 6은 본 발명의 일 실시예에 따른 하이브리드 자동차에서 출발 시각 변경에 따른 추가 충전 필요량을 설명하기 위한 도면이다.
도 7은 본 발명의 일 실시예에 따른 하이브리드 자동차에서 출발 시각 변경에 따른 시리즈 충전을 통해 목표 SOC가 만족되도록 하는 충전 스케쥴의 일례를 나타낸다.
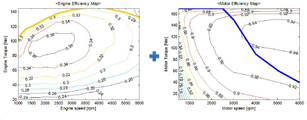
도 8은 엔진 효율과 모터 효율을 속도와 토크에 따라 나타낸 그래프이다.
도 9는 본 발명의 일 실시예에 따른 발전 효율 맵을 통한 최적 운전점의 결정 형태를 설명하기 위한 그래프이다.
도 10은 본 발명의 일 실시예에 따른 하이브리드 자동차에서 충전 전력 불안정에 따른 시리즈 충전 개입을 설명하기 위한 도면이다.
도 11은 본 발명의 일 실시예에 따른 배기가스 배출 제한 지역을 고려한 예약 충전 설정 형태의 일례를 나타낸다.
도 12는 본 발명의 일 실시예에 따른 하이브리드 자동차에서 충전 환경 변경에 따른 충전 제어 과정의 일례를 나타내는 순서도이다.
도 13은 본 발명의 다른 실시예에 따른 하이브리드 자동차에서 목적지까지 저속구간이 주를 이룰 경우 시리즈 충전이 수행되는 형태의 일례를 나타낸다.
도 14는 본 발명의 다른 실시예에 따른 하이브리드 자동차에서 목적지까지 고부하 구간이 주를 이룰 경우 시리즈 충전이 수행되는 형태의 일례를 나타낸다.
도 15는 본 발명의 다른 실시예에 따른 하이브리드 자동차에서 목적지까지 저속구간과 고부하 구간이 혼재하는 경우 시리즈 충전이 수행되는 형태의 일례를 나타낸다.
Claims (19)
- 출발 시각 및 목표 배터리 상태(SOC)에 따른 외부 전력을 이용한 예약 충전이 설정되는 단계;
충전 환경 변화의 발생 여부를 모니터링하는 단계;
상기 충전 환경 변화가 발생하는 경우, 현재 설정된 출발 시각에 상기 목표 배터리 상태의 달성 가능 여부를 판단하는 단계; 및
상기 판단 결과, 상기 목표 배터리 상태의 달성이 불가한 경우, 엔진과 모터를 이용한 시리즈 충전을 수행하는 단계를 포함하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제1 항에 있어서,
상기 충전 환경 변화는,
상기 출발 시각의 변경 및 상기 외부 전력의 불안정화 중 적어도 하나를 포함하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제1 항에 있어서,
상기 판단하는 단계는,
상기 현재 설정된 출발 시각에서의 배터리 상태를 판단하는 단계; 및
상기 판단된 배터리 상태를 상기 목표 배터리 상태와 비교하는 단계를 포함하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제3 항에 있어서,
상기 시리즈 충전을 수행하는 단계는,
상기 목표 배터리 상태와 상기 판단된 배터리 상태의 차분에 해당하는 추가 충전 필요량을 판단하는 단계; 및
상기 추가 충전 필요량 및 상기 현재 설정된 출발 시각까지의 잔여 시간을 기반으로 최소 충전 파워를 결정하는 단계를 포함하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제4 항에 있어서,
상기 시리즈 충전을 수행하는 단계는,
상기 최소 충전 파워를 기반으로 상기 엔진의 최적 효율 운전점을 판단하는 단계; 및
상기 판단된 최적 효율 운전점에서 상기 시리즈 충전을 수행하는 단계를 더 포함하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제5 항에 있어서,
상기 최적 효율 운전점을 판단하는 단계는,
상기 최소 충전 파워 이상의 충전 파워를 갖는 운전점 중 충전 효율이 가장 높은 운전점을 상기 최적 효율 운전점으로 판단하는 단계를 포함하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제2 항에 있어서,
상기 충전 환경 변화가 상기 외부 전력의 불안정화인 경우, 상기 시리즈 충전을 수행하는 단계는, 상기 현재 설정된 출발 시각에 종료되도록 후행으로 수행되는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 출발 시각 및 목표 배터리 상태(SOC)에 따른 외부 전력을 이용한 예약 충전이 설정되는 단계;
목적지까지의 경로 정보를 획득하는 단계;
상기 경로 정보를 기반으로 보조 모터를 통해 충전이 수행될 제1 구간과 엔진의 풀로드 주행이 수행될 제2 구간을 판단하는 단계;
상기 제1 구간에서 상기 보조 모터가 충전하는 제1 에너지 및 상기 제2 구간을 상기 엔진을 최적 운전라인(OOL)에 따라 운행하며 모터 어시스트를 병행할 때 모터에서 소모될 제2 에너지를 판단하는 단계; 및
상기 제1 에너지 및 상기 제2 에너지를 기반으로 상기 예약 충전이 수행되는 중 상기 모터를 이용한 시리즈 충전을 수행하는 단계를 포함하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제8 항에 있어서,
상기 제1 구간 및 상기 제2 구간은,
상기 목표 배터리 상태로 출발할 때 충전 유지(CS) 구간에 해당하는, 플러그인 하이브리드 자동차의 충전 제어 방법. - 제1 항 내지 제9 항 중 어느 한 항에 따른 플러그인 하이브리드 자동차의 충전 제어 방법을 실행시키기 위한 프로그램을 기록한 컴퓨터 해독 가능 기록 매체.
- 모터;
엔진; 및
하이브리드 제어기를 포함하되,
상기 하이브리드 제어기는,
출발 시각 및 목표 배터리 상태(SOC)에 따른 외부 전력을 이용한 예약 충전이 설정되면, 충전 환경 변화의 발생 여부를 모니터링하고, 상기 충전 환경 변화가 발생하는 경우, 현재 설정된 출발 시각에 상기 목표 배터리 상태의 달성 가능 여부를 판단하고, 상기 판단 결과 상기 목표 배터리 상태의 달성이 불가한 경우, 상기 엔진과 상기 모터를 이용한 시리즈 충전이 수행되도록 제어하는, 플러그인 하이브리드 자동차. - 제11 항에 있어서,
상기 충전 환경 변화는,
상기 출발 시각의 변경 및 상기 외부 전력의 불안정화 중 적어도 하나를 포함하는, 플러그인 하이브리드 자동차. - 제11 항에 있어서,
상기 하이브리드 제어기는,
상기 현재 설정된 출발 시각에서의 배터리 상태를 판단하고, 상기 판단된 배터리 상태를 상기 목표 배터리 상태와 비교하는, 플러그인 하이브리드 자동차. - 제13 항에 있어서,
상기 하이브리드 제어기는,
상기 목표 배터리 상태와 상기 판단된 배터리 상태의 차분에 해당하는 추가 충전 필요량을 판단하고, 상기 추가 충전 필요량 및 상기 현재 설정된 출발 시각까지의 잔여 시간을 기반으로 최소 충전 파워를 결정하는, 플러그인 하이브리드 자동차. - 제14 항에 있어서,
상기 하이브리드 제어기는,
상기 최소 충전 파워를 기반으로 상기 엔진의 최적 효율 운전점을 판단하고, 상기 판단된 최적 효율 운전점에서 상기 시리즈 충전이 수행되도록 제어하는, 플러그인 하이브리드 자동차. - 제15 항에 있어서,
상기 하이브리드 제어기는,
상기 최소 충전 파워 이상의 충전 파워를 갖는 운전점 중 충전 효율이 가장 높은 운전점을 상기 최적 효율 운전점으로 판단하는, 플러그인 하이브리드 자동차. - 제12 항에 있어서,
상기 충전 환경 변화가 상기 외부 전력의 불안정화인 경우,
상기 하이브리드 제어기는,
상기 현재 설정된 출발 시각에 상기 시리즈 충전이 종료되도록 후행으로 수행되도록 제어하는, 플러그인 하이브리드 자동차. - 엔진;
보조 모터;
모터; 및
하이브리드 제어기를 포함하되,
상기 하이브리드 제어기는,
출발 시각 및 목표 배터리 상태(SOC)에 따른 외부 전력을 이용한 예약 충전이 설정되면, 목적지까지의 경로 정보를 획득하고, 상기 경로 정보를 기반으로 보조 모터를 통해 충전이 수행될 제1 구간과 엔진의 풀로드 주행이 수행될 제2 구간을 판단하며, 상기 제1 구간에서 상기 보조 모터가 충전하는 제1 에너지 및 상기 제2 구간을 상기 엔진을 최적 운전라인(OOL)에 따라 운행하며 모터 어시스트를 병행할 때 모터에서 소모될 제2 에너지를 판단하여, 상기 제1 에너지 및 상기 제2 에너지를 기반으로 상기 예약 충전이 수행되는 중 상기 모터를 이용한 시리즈 충전이 수행되도록 제어하는, 플러그인 하이브리드 자동차. - 제18 항에 있어서,
상기 제1 구간 및 상기 제2 구간은,
상기 목표 배터리 상태로 출발할 때 충전 유지(CS) 구간에 해당하는, 플러그인 하이브리드 자동차.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180147230A KR102524295B1 (ko) | 2018-11-26 | 2018-11-26 | 플러그인 하이브리드 자동차 및 그를 위한 충전 제어 방법 |
| US16/514,097 US11648850B2 (en) | 2018-11-26 | 2019-07-17 | Plug-in hybrid electric vehicle and charging control method therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180147230A KR102524295B1 (ko) | 2018-11-26 | 2018-11-26 | 플러그인 하이브리드 자동차 및 그를 위한 충전 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200061664A true KR20200061664A (ko) | 2020-06-03 |
| KR102524295B1 KR102524295B1 (ko) | 2023-04-21 |
Family
ID=70770492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180147230A Active KR102524295B1 (ko) | 2018-11-26 | 2018-11-26 | 플러그인 하이브리드 자동차 및 그를 위한 충전 제어 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11648850B2 (ko) |
| KR (1) | KR102524295B1 (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102668312B1 (ko) * | 2019-08-22 | 2024-05-22 | 현대자동차주식회사 | 예약 충전 제어 방법 및 장치 |
| US11651334B1 (en) | 2019-11-25 | 2023-05-16 | State Farm Mutual Automobile Insurance Company | Systems and methods for enhancing waste disposal and energy efficiency using sensor and alternative power technologies |
| US11469663B2 (en) | 2020-03-06 | 2022-10-11 | Infineon Technologies LLC | Dual regulation-loop ramp-controlled DC-DC converter |
| JP2022100059A (ja) * | 2020-12-23 | 2022-07-05 | トヨタ自動車株式会社 | ハイブリッド車両の計算装置、ルート表示装置、及び制御システム |
| JP2022183657A (ja) * | 2021-05-31 | 2022-12-13 | マツダ株式会社 | 電動車両の制御装置 |
| CN117183823B (zh) * | 2022-05-30 | 2024-10-29 | 比亚迪股份有限公司 | 充电控制方法、充电控制装置及车辆 |
| CN115027313B (zh) * | 2022-06-30 | 2026-03-24 | 章鱼博士智能技术(上海)有限公司 | 电动车辆的智能充电控制方法、存储介质和电动车辆 |
| CN116142167B (zh) * | 2022-12-30 | 2025-02-11 | 东风商用车有限公司 | 一种基于虚拟双电池的汽车驱动模式控制方法 |
| CN116552325A (zh) * | 2023-06-19 | 2023-08-08 | 中国第一汽车股份有限公司 | 车载电池的充放电控制方法、装置、车辆及存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110191220A1 (en) * | 2010-01-29 | 2011-08-04 | Gm Global Technology Operations, Inc. | Method for charging a plug-in electric vehicle |
| KR20130066983A (ko) * | 2011-12-13 | 2013-06-21 | 현대자동차주식회사 | 하이브리드 자동차의 배터리 충방전 제어방법 |
| US20150314690A1 (en) * | 2014-05-05 | 2015-11-05 | GM Global Technology Operations LLC | Method for charging a plug-in electric vehicle |
| US9283954B2 (en) * | 2007-07-12 | 2016-03-15 | Odyne Systems, Llc | System for and method of fuel optimization in a hybrid vehicle |
| KR20170068032A (ko) * | 2015-12-09 | 2017-06-19 | 현대자동차주식회사 | 하이브리드 차량용 직류 변환기 제어 방법 및 시스템 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11014466B2 (en) * | 2018-01-12 | 2021-05-25 | Johnson Controls Technology Company | Building energy optimization system with battery powered vehicle cost optimization |
-
2018
- 2018-11-26 KR KR1020180147230A patent/KR102524295B1/ko active Active
-
2019
- 2019-07-17 US US16/514,097 patent/US11648850B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9283954B2 (en) * | 2007-07-12 | 2016-03-15 | Odyne Systems, Llc | System for and method of fuel optimization in a hybrid vehicle |
| US20110191220A1 (en) * | 2010-01-29 | 2011-08-04 | Gm Global Technology Operations, Inc. | Method for charging a plug-in electric vehicle |
| KR20130066983A (ko) * | 2011-12-13 | 2013-06-21 | 현대자동차주식회사 | 하이브리드 자동차의 배터리 충방전 제어방법 |
| US20150314690A1 (en) * | 2014-05-05 | 2015-11-05 | GM Global Technology Operations LLC | Method for charging a plug-in electric vehicle |
| KR20170068032A (ko) * | 2015-12-09 | 2017-06-19 | 현대자동차주식회사 | 하이브리드 차량용 직류 변환기 제어 방법 및 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11648850B2 (en) | 2023-05-16 |
| US20200164764A1 (en) | 2020-05-28 |
| KR102524295B1 (ko) | 2023-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102524295B1 (ko) | 플러그인 하이브리드 자동차 및 그를 위한 충전 제어 방법 | |
| KR102444661B1 (ko) | 하이브리드 자동차 및 그를 위한 주행 모드 제어 방법 | |
| EP3725615B1 (en) | Method and device for controlling hybrid vehicle | |
| JP5688920B2 (ja) | ハイブリッド車両のバッテリーsocのバランシング制御方法 | |
| KR102602227B1 (ko) | 친환경 자동차 및 그를 위한 충전량 안내 방법 | |
| US20180118187A1 (en) | Systems and methods for implementing dynamic operating modes and control policies for hybrid electric vehicles | |
| KR102444667B1 (ko) | 하이브리드 자동차 및 그를 위한 주행 모드 제어 방법 | |
| KR101927176B1 (ko) | 친환경 차량의 저전압 직류 변환기의 출력 제어 방법 및 그 장치 | |
| JP2008150014A (ja) | ハイブリッド電気車両のアイドリング充電時の発電制御方法 | |
| WO2018096821A1 (ja) | 車両の走行制御装置 | |
| CN102267453A (zh) | 一种增程式电动车的能量管理方法 | |
| KR102331762B1 (ko) | 하이브리드 자동차 및 그를 위한 변속 패턴 제어 방법 | |
| KR102885170B1 (ko) | 하이브리드 자동차 및 그 제어 방법 | |
| KR102444664B1 (ko) | 하이브리드 자동차 및 그를 위한 변속 제어 방법 | |
| KR102859892B1 (ko) | 하이브리드 자동차 및 그를 위한 주행 제어 방법 | |
| KR20190013015A (ko) | 하이브리드 자동차 및 그를 위한 주행 모드 제어 방법 | |
| KR102343956B1 (ko) | 하이브리드 자동차 및 그를 위한 주행 모드 제어 방법 | |
| KR102355425B1 (ko) | 하이브리드 자동차 및 그를 위한 엔진 제어 방법 | |
| CN112622873B (zh) | 混合动力车辆及控制其变速的方法以及记录介质 | |
| JP3013764B2 (ja) | ハイブリッド電気自動車の充放電制御装置 | |
| KR102676240B1 (ko) | 하이브리드 자동차 및 그를 위한 제동 제어 방법 | |
| KR20190030011A (ko) | 하이브리드 자동차 및 그의 모드 전환 제어 방법 | |
| KR20200129204A (ko) | 태양 전지를 구비한 하이브리드 자동차 및 그를 위한 주행 모드 제어 방법 | |
| KR102331765B1 (ko) | 하이브리드 자동차 및 그를 위한 주행 모드 제어 방법 | |
| KR102699154B1 (ko) | 하이브리드 자동차 및 그 동력 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |