KR20200064542A - 드론을 이용한 지상기준점 측량장치 및 그 방법 - Google Patents
드론을 이용한 지상기준점 측량장치 및 그 방법 Download PDFInfo
- Publication number
- KR20200064542A KR20200064542A KR1020180150751A KR20180150751A KR20200064542A KR 20200064542 A KR20200064542 A KR 20200064542A KR 1020180150751 A KR1020180150751 A KR 1020180150751A KR 20180150751 A KR20180150751 A KR 20180150751A KR 20200064542 A KR20200064542 A KR 20200064542A
- Authority
- KR
- South Korea
- Prior art keywords
- drone
- reference point
- ground reference
- altitude
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/02—Means for marking measuring points
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/02—Picture taking arrangements specially adapted for photogrammetry or photographic surveying, e.g. controlling overlapping of pictures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D47/00—Equipment not otherwise provided for
- B64D47/08—Arrangements of cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U20/00—Constructional aspects of UAVs
- B64U20/80—Arrangement of on-board electronics, e.g. avionics systems or wiring
- B64U20/87—Mounting of imaging devices, e.g. mounting of gimbals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/36—Videogrammetry, i.e. electronic processing of video signals from a single source or from different sources to give parallax or range information
-
- B64C2201/127—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
- B64U2101/32—UAVs specially adapted for particular uses or applications for imaging, photography or videography for cartography or topography
-
- G01C2011/36—
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Signal Processing (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description
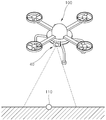
도 2는 본 발명의 일 실시예에 따른 드론을 이용한 지상기준점 측량장치의 측량 상황을 나타낸 예시도이다.
도 3은 본 발명의 일 실시예에 따른 드론을 이용한 지상기준점 측량장치에 의한 측량 사례를 나타낸 도면이다.
도 4는 본 발명의 일 실시예에 따른 드론을 이용한 지상기준점 측량방법을 설명하기 위한 흐름도이다.
30 : 고도 측정부 40 : 영상 촬영부
50 : 측량 제어부 60 : 드론 구동부
100 : 드론 110 : 지상기준점
Claims (9)
- 드론의 위치를 측정하기 위한 RTK 수신부;
상기 드론의 비행자세를 측정하는 자세 측정부;
상기 드론의 고도를 측정하기 위한 고도 측정부;
지상기준점을 촬영하기 위한 영상 촬영부;
상기 드론을 구동하기 위한 드론 구동부; 및
상기 드론 구동부에 제어명령을 입력하여 상기 드론을 상기 지상기준점의 상공으로 호버링시킨 후 상기 RTK 수신부와 상기 고도 측정부로부터 취득한 상기 드론의 위치와 고도를 입력받아 상기 드론의 위치를 확정하고, 상기 자세 측정부로부터 상기 드론의 비행자세를 입력받아 상기 영상 촬영부를 통해 촬영한 촬영영상으로부터 상기 지상기준점의 좌표를 획득하여 상기 지상기준점의 위치를 측량하는 측량 제어부;를 포함하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량장치.
- 제 1항에 있어서, 상기 자세 측정부는, 상기 지상기준점이 포함되는 지면과의 자세를 측정하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량장치.
- 제 1항에 있어서, 상기 고도 측정부는, 기압계, 고도계, 및 레이저 스캐너 중 어느 하나 이상을 포함하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량장치.
- 제 1항에 있어서, 상기 측량 제어부는, 상기 고도 측정부로부터 취득한 상기 드론의 고도와, 상기 지상기준점이 포함된 지면과 상기 드론의 거리에 기초하여 상기 RTK 수신부로부터 취득한 고도를 보정하여 상기 드론의 위치를 확정하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량장치.
- 제 1항에 있어서, 상기 측량 제어부는, 상기 드론 구동부를 통해 상기 드론을 상기 지상기준점의 상공으로 호버링시킨 후 복귀시켜 상기 드론의 위치와 촬영영상으로부터 상기 지상기준점을 위치를 측량하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량장치.
- 제 1항에 있어서, 상기 측량 제어부는, 상기 드론의 비행자세에 따라 촬영영상으로부터 획득한 상기 지상기준점의 좌표를 보정하여 상기 지상기준점의 위치를 측량하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량장치.
- 측량 제어부가 드론 구동부에 제어명령을 입력하여 드론을 지상기준점의 상공으로 호버링시킨 후 복귀시키는 단계;
상기 측량 제어부가 RTK 수신부와 고도 측정부로부터 취득한 상기 드론의 위치와 고도를 입력받아 호버링할 때 상기 드론의 위치를 확정하는 단계;
상기 측량 제어부가 자세 측정부로부터 취득한 상기 드론의 비행자세로부터 호버링할 때 상기 드론의 자세를 결정하는 단계;
상기 측량 제어부가 상기 드론이 호버링할 때 영상 촬영부로부터 촬영한 촬영영상으로부터 상기 지상기준점의 좌표를 획득하는 단계; 및
상기 측량 제어부가 획득한 상기 지상기준점의 좌표에 대해 상기 드론의 위치와 자세에 기초하여 상기 지상기준점의 위치를 측량하는 단계;를 포함하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량방법.
- 제 7항에 있어서, 상기 드론의 위치를 확정하는 단계는, 상기 측량 제어부가 상기 고도 측정부로부터 취득한 드론의 고도와, 상기 지상기준점이 포함된 지면과 드론의 거리에 기초하여 상기 RTK 수신부로부터 취득한 고도를 보정하여 상기 드론의 위치를 확정하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량방법.
- 제 7항에 있어서, 상기 드론의 자세를 결정하는 단계는, 상기 측량 제어부가 상기 지상기준점이 포함되는 지면과의 자세를 결정하는 것을 특징으로 하는 드론을 이용한 지상기준점 측량방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180150751A KR102664900B1 (ko) | 2018-11-29 | 2018-11-29 | 드론을 이용한 지상기준점 측량장치 및 그 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180150751A KR102664900B1 (ko) | 2018-11-29 | 2018-11-29 | 드론을 이용한 지상기준점 측량장치 및 그 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200064542A true KR20200064542A (ko) | 2020-06-08 |
| KR102664900B1 KR102664900B1 (ko) | 2024-05-16 |
Family
ID=71089605
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180150751A Active KR102664900B1 (ko) | 2018-11-29 | 2018-11-29 | 드론을 이용한 지상기준점 측량장치 및 그 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102664900B1 (ko) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102242366B1 (ko) * | 2020-10-29 | 2021-04-21 | 한국건설기술연구원 | 토공현장의 디지털맵 생성을 위한 드론 기반 지상기준점 배치 자동화 장치 |
| KR102260372B1 (ko) * | 2020-10-29 | 2021-06-03 | 한국건설기술연구원 | 토공현장의 디지털맵 생성을 위한 드론 기반 지상기준점 배치 자동화 방법 |
| KR102307616B1 (ko) * | 2021-07-02 | 2021-10-05 | 주식회사 지오앤 | 3차원 입체영상이미지의 형성을 위해 드론과 차량을 이용하여 촬영된 이미지를 이용한 영상처리시스템 |
| KR102311384B1 (ko) * | 2021-07-02 | 2021-10-13 | 주식회사 지오앤 | 디지털 촬영이미지의 위치별 3차원 가시화가 가능한 영상처리시스템 |
| CN113866804A (zh) * | 2020-06-30 | 2021-12-31 | 中国石油天然气集团有限公司 | 实时动态差分定位方法、控制装置、系统 |
| CN113916187A (zh) * | 2020-07-07 | 2022-01-11 | 中国电信股份有限公司 | 基于无人机的基站天线下倾角测量方法、装置和系统 |
| KR20220134730A (ko) * | 2021-03-26 | 2022-10-05 | 디테코 주식회사 | 재난 지휘 차량용 유선 드론 시스템 |
| KR102476571B1 (ko) * | 2022-05-26 | 2022-12-14 | 주식회사 대한측량기술 | Uav 촬영을 이용한 지상기준점 방식의 지하시설물 측량시스템 |
| KR20220166135A (ko) | 2021-06-09 | 2022-12-16 | 주식회사 포스웨이브 | 다수의 무인 비행체를 이용한 공간분할 방식의 위치정보제공 시스템 및 방법 |
| KR20230101148A (ko) * | 2021-12-29 | 2023-07-06 | 주식회사 공간정보 | 드론 장착 구조의 보정용 고도측량 시스템 |
| KR102559042B1 (ko) | 2022-12-23 | 2023-07-25 | 한국건설기술연구원 | 개량형 지상기준점 매칭 이미지 모델링 시스템과 이를 이용한 이미지 모델링 방법, 그리고 이것이 수록된 컴퓨터 프로그램 |
| CN117071379A (zh) * | 2023-07-31 | 2023-11-17 | 上海宝冶集团有限公司 | 一种高架桥沥青路面面层摊铺实时测量方法 |
| KR20240060043A (ko) | 2022-10-28 | 2024-05-08 | 주식회사 포스웨이브 | 다수의 무인 비행체를 제어할 수 있는 공간분할 방식의 위치정보제공 지상통제시스템 및 방법 |
| KR20240123627A (ko) | 2023-02-07 | 2024-08-14 | 김도형 | 마커 기반 무인항공사진측량 자동보정장치 및 그 장치의 구동방법 |
| KR20240148613A (ko) * | 2023-04-04 | 2024-10-11 | 한국철도기술연구원 | Gnss 신호 음영구역에서 고도 측정에 기반한 멀티콥터 제어 시스템 및 방법 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103822615A (zh) * | 2014-02-25 | 2014-05-28 | 北京航空航天大学 | 一种多控制点自动提取与聚合的无人机地面目标实时定位方法 |
| JP5882693B2 (ja) * | 2011-11-24 | 2016-03-09 | 株式会社トプコン | 航空写真撮像方法及び航空写真撮像装置 |
| JP2017142226A (ja) * | 2015-11-23 | 2017-08-17 | パロット ドローンズ | ウォブル効果を訂正された画像のシーケンスを送信するビデオカメラが設けられたドローン |
| KR101845887B1 (ko) * | 2018-02-23 | 2018-04-06 | 중앙항업(주) | 지형지물의 기준점별 영상이미지의 공간영상 도화 시스템 |
| JP6393912B2 (ja) * | 2014-10-24 | 2018-09-26 | 株式会社amuse oneself | 測量システム、設定装置、設定プログラム及び記録媒体 |
-
2018
- 2018-11-29 KR KR1020180150751A patent/KR102664900B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5882693B2 (ja) * | 2011-11-24 | 2016-03-09 | 株式会社トプコン | 航空写真撮像方法及び航空写真撮像装置 |
| CN103822615A (zh) * | 2014-02-25 | 2014-05-28 | 北京航空航天大学 | 一种多控制点自动提取与聚合的无人机地面目标实时定位方法 |
| JP6393912B2 (ja) * | 2014-10-24 | 2018-09-26 | 株式会社amuse oneself | 測量システム、設定装置、設定プログラム及び記録媒体 |
| JP2017142226A (ja) * | 2015-11-23 | 2017-08-17 | パロット ドローンズ | ウォブル効果を訂正された画像のシーケンスを送信するビデオカメラが設けられたドローン |
| KR101845887B1 (ko) * | 2018-02-23 | 2018-04-06 | 중앙항업(주) | 지형지물의 기준점별 영상이미지의 공간영상 도화 시스템 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113866804A (zh) * | 2020-06-30 | 2021-12-31 | 中国石油天然气集团有限公司 | 实时动态差分定位方法、控制装置、系统 |
| CN113866804B (zh) * | 2020-06-30 | 2025-07-29 | 中国石油天然气集团有限公司 | 实时动态差分定位方法、控制装置、系统 |
| CN113916187B (zh) * | 2020-07-07 | 2024-04-30 | 中国电信股份有限公司 | 基于无人机的基站天线下倾角测量方法、装置和系统 |
| CN113916187A (zh) * | 2020-07-07 | 2022-01-11 | 中国电信股份有限公司 | 基于无人机的基站天线下倾角测量方法、装置和系统 |
| KR102242366B1 (ko) * | 2020-10-29 | 2021-04-21 | 한국건설기술연구원 | 토공현장의 디지털맵 생성을 위한 드론 기반 지상기준점 배치 자동화 장치 |
| KR102260372B1 (ko) * | 2020-10-29 | 2021-06-03 | 한국건설기술연구원 | 토공현장의 디지털맵 생성을 위한 드론 기반 지상기준점 배치 자동화 방법 |
| KR20220134730A (ko) * | 2021-03-26 | 2022-10-05 | 디테코 주식회사 | 재난 지휘 차량용 유선 드론 시스템 |
| KR20220166135A (ko) | 2021-06-09 | 2022-12-16 | 주식회사 포스웨이브 | 다수의 무인 비행체를 이용한 공간분할 방식의 위치정보제공 시스템 및 방법 |
| KR102311384B1 (ko) * | 2021-07-02 | 2021-10-13 | 주식회사 지오앤 | 디지털 촬영이미지의 위치별 3차원 가시화가 가능한 영상처리시스템 |
| KR102307616B1 (ko) * | 2021-07-02 | 2021-10-05 | 주식회사 지오앤 | 3차원 입체영상이미지의 형성을 위해 드론과 차량을 이용하여 촬영된 이미지를 이용한 영상처리시스템 |
| KR20230101148A (ko) * | 2021-12-29 | 2023-07-06 | 주식회사 공간정보 | 드론 장착 구조의 보정용 고도측량 시스템 |
| KR102476571B1 (ko) * | 2022-05-26 | 2022-12-14 | 주식회사 대한측량기술 | Uav 촬영을 이용한 지상기준점 방식의 지하시설물 측량시스템 |
| KR20240060043A (ko) | 2022-10-28 | 2024-05-08 | 주식회사 포스웨이브 | 다수의 무인 비행체를 제어할 수 있는 공간분할 방식의 위치정보제공 지상통제시스템 및 방법 |
| KR102559042B1 (ko) | 2022-12-23 | 2023-07-25 | 한국건설기술연구원 | 개량형 지상기준점 매칭 이미지 모델링 시스템과 이를 이용한 이미지 모델링 방법, 그리고 이것이 수록된 컴퓨터 프로그램 |
| KR20240123627A (ko) | 2023-02-07 | 2024-08-14 | 김도형 | 마커 기반 무인항공사진측량 자동보정장치 및 그 장치의 구동방법 |
| KR20240148613A (ko) * | 2023-04-04 | 2024-10-11 | 한국철도기술연구원 | Gnss 신호 음영구역에서 고도 측정에 기반한 멀티콥터 제어 시스템 및 방법 |
| CN117071379A (zh) * | 2023-07-31 | 2023-11-17 | 上海宝冶集团有限公司 | 一种高架桥沥青路面面层摊铺实时测量方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102664900B1 (ko) | 2024-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102664900B1 (ko) | 드론을 이용한 지상기준점 측량장치 및 그 방법 | |
| CN106774431B (zh) | 一种测绘无人机航线规划方法及装置 | |
| US10970924B2 (en) | Reconstruction of a scene from a moving camera | |
| KR100912715B1 (ko) | 이종 센서 통합 모델링에 의한 수치 사진 측량 방법 및장치 | |
| CN102840852B (zh) | 航空摄影图像拾取方法和航空摄影图像拾取装置 | |
| KR101444685B1 (ko) | 영상기반 멀티센서 데이터를 이용한 차량의 위치자세 결정 방법 및 장치 | |
| KR101346323B1 (ko) | 지상기준점과 부가매개변수를 이용한 비측량용 디지털 카메라 촬영 시스템의 자체검정 방법 | |
| KR101160454B1 (ko) | 무인항공기의 자세 제어를 이용한 3d 공간정보구축 방법 | |
| CN102322859B (zh) | 一种航空惯性导航测量系统及姿态校正方法 | |
| WO2017000876A1 (zh) | 对地定位或导航用相机、飞行器及其导航方法 | |
| CN112334733A (zh) | 拍摄装置的校正装置、监视装置、作业机械及校正方法 | |
| KR101183866B1 (ko) | Gps/ins/영상at를 통합한 실시간 위치/자세 결정 장치 및 방법 | |
| KR101224830B1 (ko) | 지리 참조 영상 획득을 위한 휴대용 멀티센서 시스템 및 그 방법 | |
| JP2011112556A (ja) | 捜索目標位置特定装置及び捜索目標位置特定方法並びにコンピュータプログラム | |
| CN103411587A (zh) | 定位定姿方法及系统 | |
| CN106325305A (zh) | 对地定位或导航用相机、飞行器及其导航方法和系统 | |
| CN110986888A (zh) | 一种航空摄影一体化方法 | |
| CN115950435A (zh) | 无人机巡检影像的实时定位方法 | |
| JP3808833B2 (ja) | 空中写真測量方法 | |
| JP5134784B2 (ja) | 空中写真測量方法 | |
| CN109489547A (zh) | 一种堆渣体堆渣量动态变化的监测方法 | |
| KR100952136B1 (ko) | 경사영상의 외부표정요소 보정방법 및 이를 이용한 구조물의 3차원 정보를 측정하는 방법 | |
| KR101346206B1 (ko) | 정사영상의 정밀 처리를 위한 gps 기반 항공측량시스템 | |
| WO2019100214A1 (zh) | 输出影像生成方法、设备及无人机 | |
| KR100745105B1 (ko) | 촬영 영상 표시 방법 및 촬영 영상 표시 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |