KR20200065116A - 차량 및 그 제어 방법 - Google Patents
차량 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20200065116A KR20200065116A KR1020180150272A KR20180150272A KR20200065116A KR 20200065116 A KR20200065116 A KR 20200065116A KR 1020180150272 A KR1020180150272 A KR 1020180150272A KR 20180150272 A KR20180150272 A KR 20180150272A KR 20200065116 A KR20200065116 A KR 20200065116A
- Authority
- KR
- South Korea
- Prior art keywords
- torque
- vehicle
- stage
- driver
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/16—Inhibiting or initiating shift during unfavourable conditions , e.g. preventing forward-reverse shift at high vehicle speed, preventing engine overspeed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/50—Signals to an engine or motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/076—Slope angle of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/12—Limiting control by the driver depending on vehicle state, e.g. interlocking means for the control input for preventing unsafe operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
- F16H59/10—Range selector apparatus comprising levers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/141—Inputs being a function of torque or torque demand of rate of change of torque or torque demand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/18—Inputs being a function of torque or torque demand dependent on the position of the accelerator pedal
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/44—Inputs being a function of speed dependent on machine speed, e.g. the vehicle speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/60—Inputs being a function of ambient conditions
- F16H59/66—Road conditions, e.g. slope, slippery
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/46—Automatic regulation in accordance with output requirements
- F16H61/468—Automatic regulation in accordance with output requirements for achieving a target input torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope, i.e. the inclination of a road segment in the longitudinal direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H2059/142—Inputs being a function of torque or torque demand of driving resistance calculated from weight, slope, or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/18—Inputs being a function of torque or torque demand dependent on the position of the accelerator pedal
- F16H2059/183—Rate of change of accelerator position, i.e. pedal or throttle change gradient
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/60—Inputs being a function of ambient conditions
- F16H59/66—Road conditions, e.g. slope, slippery
- F16H2059/663—Road slope
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H2061/6604—Special control features generally applicable to continuously variable gearings
- F16H2061/6611—Control to achieve a particular driver perception, e.g. for generating a shift shock sensation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/50—Signals to an engine or motor
- F16H2063/508—Signals to an engine or motor for limiting transmission input torque, e.g. to prevent damage of transmission parts
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
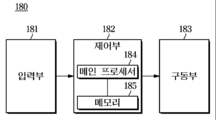
도 2는 일 실시 예에 따른 차량 제어 시스템을 탑재한 차량에 포함되는 각종 전자 장치를 나타낸 블록도이다.
도 3 및 도 4는 일 실시예에 따른 차량 제어 시스템의 블록도이다.
도 5은 일 실시 예에 따른 차량의 제어 방법을 나타낸 순서도이다.
도 6은 구배 부하 토크를 산출하는 방법을 설명하는 개략도이다.
도 7은 가속 토크를 산출 맵이다.
도 8 내지 도 10은 일 실시예에 따른 차량의 기어, 운전자 가속 페달 입력, 구배 부하 토크, 운전자 요구 토크 및 모터 토크 출력을 나타낸 그래프이다.
141: 차륜180: 차량 제어 시스템
Claims (20)
- SBW(Shift-by-Wire) 방식의 변속 레버가 사용되는 차량에 있어서,
상기 차량의 가속 페달 답력 및 상기 변속 레버의 P단으로의 변속 명령 및 주행 중인 도로의 구배 정보를 입력 받는 입력부;
상기 차량의 가속 페달 답력이 인가되고, 상기 P단으로의 변속 명령이 입력되면, 상기 차량의 구배 부하 토크, 가속 토크를 산출하고, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 제어부; 및
상기 운전자 요구 토크가 제한되면 상기 변속 레버를 P단으로 변속시키는 구동부;를 포함하는 차량. - 제 1 항에 있어서,
상기 제어부는,
상기 차량이 D단에서 P단으로의 변속 명령이 입력된 경우에 산출된 가속 토크와 구배 부하 토크의 최소값과 상기 최소값과 미리 설정한 특정 토크의 최대값으로 운전자 요구 토크를 제한하는 차량. - 제 1 항에 있어서,
상기 제어부는,
상기 차량이 R단에서 P단으로의 변속 명령이 입력된 경우에 산출된 구배 부하 토크와 미리 설정한 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 운전자 요구 토크를 제한하는 차량. - 제 2 항에 있어서,
상기 제어부는,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 등판 중인 경우에, 상기 구배 부하 토크로 운전자 요구 토크를 제한하는 차량. - 제 2 항에 있어서,
상기 제어부는,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량. - 제 3 항에 있어서,
상기 제어부는,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 강판 중인 경우에, 상기 산출된 구배 부하 토크로 운전자 요구 토크를 제한하는 차량. - 제 2 항에 있어서,
상기 제어부는,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량. - 제 1항에 있어서,
상기 입력부는,
상기 차량의 속도를 더 입력받고,
상기 제어부는,
상기 차량의 속도, 및 인가된 운전자의 가속 페달 답력에 기초하여 미리 설정된 맵에 기초하여 상기 가속 토크를 산출하는 차량. - 제 8 항에 있어서,
상기 제어부는,
상기 차량의 하중, 중력 가속도, 및 상기 구배 정보를 기초로 구배 부하 토크를 산출하는 차량. - 제 1 항에 있어서,
상기 구동부는,
상기 변속 레버를 P단으로 변속시키며, 상기 변속기의 파킹 스프래그(Sprag)를 체결시키는 차량. - SBW(Shift-by-Wire) 방식의 변속 레버가 사용되는 차량의 차량 제어 방법에 있어서,
상기 차량의 가속 페달 답력 및 상기 변속 레버의 P단으로의 변속 명령 및 주행 중인 도로의 구배 정보를 입력 받고;
상기 차량의 가속 페달 답력이 인가되고, 상기 P단으로의 변속 명령이 입력되면, 상기 차량의 구배 부하 토크, 가속 토크를 산출하고;
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하고; 및
상기 운전자 요구 토크가 제한되면 상기 변속 레버를 P단으로 변속시키는 차량 제어 방법. - 제 11 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 D단에서 P단으로의 변속 명령이 입력된 경우에 산출된 가속 토크와 구배 부하 토크의 최소값과 상기 최소값과 미리 설정한 특정 토크의 최대값으로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 11 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 R단에서 P단으로의 변속 명령이 입력된 경우에 산출된 구배 부하 토크와 미리 설정한 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 12 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 등판 중인 경우에, 상기 구배 부하 토크로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 12 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 13 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 강판 중인 경우에, 상기 산출된 구배 부하 토크로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 12 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 11항에 있어서,
상기 차량의 속도를 더 입력 받고; 및
상기 가속 토크를 산출하는 것은,
상기 차량의 속도, 및 인가된 운전자의 가속 페달 답력에 기초하여 미리 설정된 맵에 기초하여 산출하는 차량 제어 방법. - 제 18 항에 있어서,
상기 구배 부하 토크를 산출하는 것은,
상기 차량의 하중, 중력 가속도, 및 상기 구배 정보를 기초로 구배 부하 토크를 산출하는 차량 제어 방법. - 제 11 항에 있어서,
상기 변속 레버를 P단으로 변속시키며, 상기 변속기의 파킹 스프래그(Sprag)를 체결시키는 것을; 더 포함하는 차량 제어 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180150272A KR102553848B1 (ko) | 2018-11-29 | 2018-11-29 | 차량 및 그 제어 방법 |
| US16/437,400 US10808837B2 (en) | 2018-11-29 | 2019-06-11 | Vehicle and method of controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180150272A KR102553848B1 (ko) | 2018-11-29 | 2018-11-29 | 차량 및 그 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200065116A true KR20200065116A (ko) | 2020-06-09 |
| KR102553848B1 KR102553848B1 (ko) | 2023-07-13 |
Family
ID=70849676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180150272A Active KR102553848B1 (ko) | 2018-11-29 | 2018-11-29 | 차량 및 그 제어 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10808837B2 (ko) |
| KR (1) | KR102553848B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12539866B2 (en) * | 2023-03-20 | 2026-02-03 | Hyundai Motor Company | Vehicle and method for limiting acceleration thereof |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210156885A (ko) * | 2020-06-17 | 2021-12-28 | 현대자동차주식회사 | Bbw 장치의 제어 시스템 |
| CN119348439B (zh) * | 2023-07-24 | 2025-12-12 | 比亚迪股份有限公司 | 蠕行控制系统、方法、装置、存储介质及整车控制器 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11125128A (ja) * | 1997-10-22 | 1999-05-11 | Mitsubishi Motors Corp | エンジン制御装置 |
| JP2006175942A (ja) * | 2004-12-21 | 2006-07-06 | Toyota Motor Corp | 加減速度制御装置 |
| KR20150059327A (ko) * | 2013-11-22 | 2015-06-01 | 현대자동차주식회사 | 차량용 변속 제어방법 |
| JP2015196492A (ja) * | 2014-04-03 | 2015-11-09 | トヨタ自動車株式会社 | ハイブリッド車 |
| KR20160067453A (ko) * | 2014-12-04 | 2016-06-14 | 현대자동차주식회사 | 자동변속기 차량의 급출발 방지 장치 및 방법 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015025644A1 (ja) * | 2013-08-20 | 2015-02-26 | 富士重工業株式会社 | シフト制御装置 |
| KR20170030962A (ko) * | 2015-09-10 | 2017-03-20 | 현대자동차주식회사 | 전기 자동차의 충격 완화 제어 방법 및 시스템 |
| US20190193736A1 (en) * | 2016-09-14 | 2019-06-27 | Jatco Ltd | Automatic transmission and control method of the same |
| CN109642508B (zh) * | 2016-11-10 | 2021-08-17 | 加特可株式会社 | 车辆的控制装置及车辆的控制方法 |
| US10830351B2 (en) * | 2018-02-19 | 2020-11-10 | Ford Global Technologies, Llc | Method for disengaging hydraulic park |
| JP6717905B2 (ja) * | 2018-09-21 | 2020-07-08 | 株式会社Subaru | パーキングロック装置 |
-
2018
- 2018-11-29 KR KR1020180150272A patent/KR102553848B1/ko active Active
-
2019
- 2019-06-11 US US16/437,400 patent/US10808837B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11125128A (ja) * | 1997-10-22 | 1999-05-11 | Mitsubishi Motors Corp | エンジン制御装置 |
| JP2006175942A (ja) * | 2004-12-21 | 2006-07-06 | Toyota Motor Corp | 加減速度制御装置 |
| KR20150059327A (ko) * | 2013-11-22 | 2015-06-01 | 현대자동차주식회사 | 차량용 변속 제어방법 |
| JP2015196492A (ja) * | 2014-04-03 | 2015-11-09 | トヨタ自動車株式会社 | ハイブリッド車 |
| KR20160067453A (ko) * | 2014-12-04 | 2016-06-14 | 현대자동차주식회사 | 자동변속기 차량의 급출발 방지 장치 및 방법 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12539866B2 (en) * | 2023-03-20 | 2026-02-03 | Hyundai Motor Company | Vehicle and method for limiting acceleration thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102553848B1 (ko) | 2023-07-13 |
| US20200173548A1 (en) | 2020-06-04 |
| US10808837B2 (en) | 2020-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10556590B2 (en) | Vehicle and control method thereof | |
| US10737687B2 (en) | Vehicle and method for controlling the same | |
| US7983828B2 (en) | Automatic brake control device | |
| JP5987570B2 (ja) | 自動変速機の変速制御装置 | |
| US9205843B2 (en) | Deceleration factor estimating device and drive assisting device | |
| EP3575130A1 (en) | Vehicle control system and method of controlling the same, and braking device | |
| US10507822B2 (en) | Method of decreasing vibration during release of stop gear of vehicle | |
| US20120330505A1 (en) | Vehicle control device | |
| CN105247192B (zh) | 车辆控制装置以及车辆控制方法 | |
| JP2013533165A (ja) | 自動車用電子パーキングブレーキシステム、及びその補助始動方法 | |
| KR20200137061A (ko) | 차량의 크립 주행 제어 시스템 및 그 방법 | |
| KR102553848B1 (ko) | 차량 및 그 제어 방법 | |
| CN113276851A (zh) | 车辆控制方法、装置、控制器及车辆 | |
| CN108372800A (zh) | 用于降低电动车辆的噪声、振动、和粗糙性的车辆系统和方法 | |
| CN104105630B (zh) | 减速因子推定装置 | |
| CN112824187B (zh) | 驾驶辅助系统及其减速控制单元和方法 | |
| US20170282925A1 (en) | Systems and methods for smooth stopping of a vehicle | |
| KR101927183B1 (ko) | 차량용 모터 제어 장치 및 방법 | |
| CN107458331A (zh) | 应用动能监控系统进行精确控制的方法 | |
| CN112776806B (zh) | 车辆及其控制方法 | |
| JP2007246023A (ja) | 車両の走行制御装置及び走行制御方法 | |
| US20240066984A1 (en) | Electric vehicle and cruise control method therefor | |
| JP2005059847A (ja) | 定速走行自動車の登坂路制御方法 | |
| JP2009018699A (ja) | ハイブリッド自動車およびその制御方法 | |
| US11383702B2 (en) | Vehicle and control method thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |