KR20200067631A - 영상 처리 장치 및 그 동작방법 - Google Patents
영상 처리 장치 및 그 동작방법 Download PDFInfo
- Publication number
- KR20200067631A KR20200067631A KR1020180154691A KR20180154691A KR20200067631A KR 20200067631 A KR20200067631 A KR 20200067631A KR 1020180154691 A KR1020180154691 A KR 1020180154691A KR 20180154691 A KR20180154691 A KR 20180154691A KR 20200067631 A KR20200067631 A KR 20200067631A
- Authority
- KR
- South Korea
- Prior art keywords
- target
- peripheral
- region
- feature
- features
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/759—Region-based matching
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/0464—Convolutional networks [CNN, ConvNet]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
- G06T1/20—Processor architectures; Processor configuration, e.g. pipelining
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/20—Image enhancement or restoration using local operators
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Data Mining & Analysis (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Biophysics (AREA)
- Mathematical Physics (AREA)
- Molecular Biology (AREA)
- Computational Linguistics (AREA)
- Biomedical Technology (AREA)
- Multimedia (AREA)
- Databases & Information Systems (AREA)
- Medical Informatics (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Image Analysis (AREA)
Abstract
Description
도 2 및 도 3은 일반적인 컨볼루션 뉴럴 네트워크에서 컨볼루션 연산이 수행되는 과정을 설명하기 위해 참조되는 도면들이다.
도 4는 일 실시예에 따른 영상 처리 장치의 동작방법을 나타내는 흐름도이다.
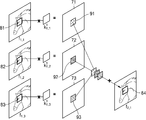
도 5 내지 도 7은 일 실시예에 따른 영상 처리 장치가 컨볼루션 뉴럴 네트워크를 이용하여, 영상을 처리하는 과정을 설명하기 위해 참조되는 도면들이다.
도 8은 일 실시예에 따른 영상 처리 장치가 주변 영역을 추출하는 방법을 설명하기 위해 참조되는 도면이다.
도 9는 일 실시예에 따른 영상 처리 장치가 주변 영역에 대해 가중치를 적용하는 방법을 설명하기 위해 참조되는 도면이다.
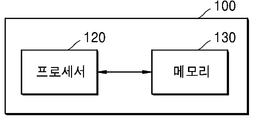
도 10은 일 실시예에 따른 영상 처리 장치의 구성을 나타내는 블록도이다.
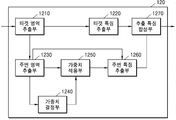
도 11은 일 실시예에 따른 프로세서의 블록도이다.





Claims (27)
- 영상 처리 장치에 있어서,
하나 이상의 인스트럭션들을 저장하는 메모리; 및
상기 메모리에 저장된 상기 하나 이상의 인스트럭션들을 실행하는 프로세서를 포함하고,
상기 프로세서는, 하나 이상의 컨볼루션 뉴럴 네트워크를 이용하여,
복수의 입력 영상들 각각에서 동일한 위치를 가지는, 타겟 영역들의 특징들과 제1 커널 세트의 컨볼루션 연산을 수행하여, 타겟 특징들을 추출하고,
상기 복수의 입력 영상들에서 상기 타겟 영역들의 주변에 위치하는, 주변 영역들의 특징들과 제2 커널 세트의 컨볼루션 연산을 수행하여, 주변 특징들을 추출하며,
상기 타겟 특징들 및 상기 주변 특징들에 기초하여, 출력 영상에서, 상기 타겟 영역들에 대응되는 영역의 특징을 결정하는, 영상 처리 장치. - 제1항에 있어서,
복수의 입력 영상들은 제1 입력 영상 및 제2 입력 영상을 포함하며,
상기 타겟 영역들은,
상기 제1 입력 영상 및 상기 제2 입력 영상 각각에서 동일한 위치를 가지는, 제1 타겟 영역 및 제2 타겟 영역을 포함하고,
상기 주변 영역들은,
상기 제1 입력 영상에서 상기 제1 타겟 영역의 주변에 위치하는 제1 주변 영역 및 상기 제2 입력 영상에서, 상기 제2 타겟 영역의 주변에 위치하는 제2 주변 영역을 포함하는, 영상 처리 장치. - 제2항에 있어서,
상기 프로세서는,
상기 제1 입력 영상에서, 상기 제1 타겟 영역과의 거리가 기 설정된 거리 이내인 범위에서, 상기 제1 주변 영역을 추출하고,
상기 제2 입력 영상에서, 상기 제2 타겟 영역과의 거리가 상기 기 설정된 거리 이내인 범위에서, 상기 제2 주변 영역을 추출하는, 영상 처리 장치. - 제2항에 있어서,
상기 프로세서는,
상기 제1 입력 영상에 포함된 복수의 영역들 각각에 대하여, 상기 제1 타겟 영역과의 특징 유사성(feature similarity)을 결정하고, 상기 특징 유사성에 기초하여, 상기 제1 주변 영역을 결정하며,
상기 제2 입력 영상에 포함된 복수의 영역들 각각에 대하여, 상기 제2 타겟 영역과의 특징 유사성을 결정하고, 상기 특징 유사성에 기초하여, 상기 제2 주변 영역을 결정하는, 영상 처리 장치. - 제4항에 있어서,
상기 제1 주변 영역은, 상기 제1 입력 영상에 포함된 복수의 영역들 중 상기 제1 타겟 영역의 특징과 가장 유사한 특징을 가지는 영역이고,
상기 제2 주변 영역은, 상기 제2 입력 영상에 포함된 복수의 영역들 중 상기 제2 타겟 영역의 특징과 가장 유사한 특징을 가지는 영역인, 영상 처리 장치. - 제2항에 있어서,
상기 프로세서는,
상기 제1 타겟 영역과 상기 제1 주변 영역과의 거리에 기초하여, 상기 제1 주변 영역에 적용되는 제1 가중치를 결정하고,
상기 제2 타겟 영역과 상기 제2 주변 영역과의 거리에 기초하여, 상기 제2 주변 영역에 적용되는 제2 가중치를 결정하며,
상기 제1 가중치 및 제2 가중치를 적용하여, 상기 주변 특징들을 추출하는, 영상 처리 장치. - 제6항에 있어서,
상기 프로세서는,
상기 제1 타겟 영역과 상기 제1 주변 영역과의 거리가 가까울수록, 상기 제1 가중치를 큰 값으로 결정하고, 상기 제2 타겟 영역과 상기 제2 주변 영역과의 거리가 가까울수록 상기 제2 가중치를 큰 값으로 결정하는, 영상 처리 장치. - 제2항에 있어서,
상기 프로세서는,
상기 제1 타겟 영역의 특징과 상기 제1 주변 영역의 특징 사이의 제1 유사도에 기초하여, 상기 제1 주변 영역에 적용되는 제1 가중치를 결정하고,
상기 제2 타겟 영역의 특징과 상기 제2 주변 영역의 특징 사이의 제2 유사도에 기초하여, 상기 제2 주변 영역에 적용되는 제2 가중치를 결정하며,
상기 제1 가중치 및 제2 가중치를 적용하여, 상기 주변 특징들을 추출하는, 영상 처리 장치. - 제8항에 있어서,
상기 프로세서는,
상기 제1 유사도가 클수록, 상기 제1 가중치를 큰 값으로 결정하고, 상기 제2 유사도가 클수록, 상기 제2 가중치를 큰 값으로 결정하는, 영상 처리 장치. - 제1항에 있어서,
상기 제1 커널 세트 및 제2 커널 세트 각각은 복수의 커널들을 포함하고, 상기 복수의 커널들의 개수는 상기 복수의 입력 영상들의 개수와 동일한, 영상 처리 장치. - 제2항에 있어서,
상기 제1 커널 세트는 제1 커널 및 제2 커널을 포함하고, 상기 제2 커널 세트는 제3 커널 및 제4 커널을 포함하며,
상기 제1 타겟 영역과 상기 제1 커널의 컨볼루션 연산을 수행하여, 제1 타겟 특징을 추출하고, 상기 제2 타겟 영역과 상기 제2 커널의 컨볼루션 연산을 수행하여 제2 타겟 특징을 추출하며,
상기 제1 주변 영역과 상기 제3 커널의 컨볼루션 연산을 수행하여 제1 주변 특징을 추출하고, 상기 제2 주변 영역과 상기 제4 커널의 컨볼루션 연산을 수행하여 제2 주변 특징을 추출하며,
상기 제1 타겟 특징, 제2 타겟 특징, 제1 주변 특징 및 제2 주변 특징에 기초하여, 상기 출력 영상에서, 상기 제1 타겟 영역 및 상기 제2 타겟 영역에 대응하는 영역의 특징을 결정하는, 영상 처리 장치. - 제1항에 있어서,
상기 프로세서는,
상기 타겟 특징들 및 상기 주변 특징들과, 제3 커널과의 컨볼루션 연산을 수행함으로써, 상기 출력 영상에서, 상기 타겟 영역들에 대응하는 영역의 특징을 결정하는, 영상 처리 장치. - 제1항에 있어서,
상기 복수의 입력 영상들은,
상기 하나 이상의 컨볼루션 뉴럴 네트워크에 포함되는 복수의 컨볼루션 레이어들 중 어느 하나에 입력되는, 복수의 프레임 영상들 및 복수의 특징 맵들 중 적어도 하나를 포함하는, 영상 처리 장치. - 영상 처리 장치의 동작방법은,
복수의 입력 영상들 각각에서 동일한 위치를 가지는, 타겟 영역들의 특징들과 제1 커널 세트의 컨볼루션 연산을 수행하여, 타겟 특징들을 추출하는 단계;
상기 복수의 입력 영상들에서 상기 타겟 영역들의 주변에 위치하는, 주변 영역들의 특징들과 제2 커널 세트의 컨볼루션 연산을 수행하여, 주변 특징들을 추출하는 단계; 및
상기 타겟 특징들 및 상기 주변 특징들에 기초하여, 출력 영상에서, 상기 타겟 영역들에 대응되는 영역의 특징을 결정하는 단계를 포함하는 영상 처리 장치의 동작방법. - 제14항에 있어서,
복수의 입력 영상들은 제1 입력 영상 및 제2 입력 영상을 포함하며,
상기 타겟 영역들은,
상기 제1 입력 영상 및 상기 제2 입력 영상 각각에서 동일한 위치를 가지는, 제1 타겟 영역 및 제2 타겟 영역을 포함하고,
상기 주변 영역들은,
상기 제1 입력 영상에서 상기 제1 타겟 영역의 주변에 위치하는 제1 주변 영역 및 상기 제2 입력 영상에서, 상기 제2 타겟 영역의 주변에 위치하는 제2 주변 영역을 포함하는, 영상 처리 장치의 동작방법. - 제15항에 있어서,
상기 주변 특징들을 추출하는 단계는,
상기 제1 입력 영상에서, 상기 제1 타겟 영역과의 거리가 기 설정된 거리 이내인 범위에서, 상기 제1 주변 영역을 추출하는 단계; 및
상기 제2 입력 영상에서, 상기 제2 타겟 영역과의 거리가 상기 기 설정된 거리 이내인 범위에서, 상기 제2 주변 영역을 추출하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제15항에 있어서,
상기 주변 특징들을 추출하는 단계는,
상기 제1 입력 영상에 포함된 복수의 영역들 각각에 대하여, 상기 제1 타겟 영역과의 특징 유사성(feature similarity)을 결정하고, 상기 특징 유사성에 기초하여, 상기 제1 주변 영역을 결정하는 단계; 및
상기 제2 입력 영상에 포함된 복수의 영역들 각각에 대하여, 상기 제2 타겟 영역과의 특징 유사성을 결정하고, 상기 특징 유사성에 기초하여, 상기 제2 주변 영역을 결정하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제17항에 있어서,
상기 제1 주변 영역을 결정하는 단계는,
상기 제1 입력 영상에 포함된 복수의 영역들 중 상기 제1 타겟 영역의 특징과 가장 유사한 특징을 가지는 영역을 상기 제1 주변 영역으로 결정하는 단계를 포함하고,
상기 제2 주변 영역을 결정하는 단계는,
상기 제2 입력 영상에 포함된 복수의 영역들 중 상기 제2 타겟 영역의 특징과 가장 유사한 특징을 가지는 영역을 상기 제2 주변 영역으로 결정하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제15항에 있어서,
상기 주변 특징들을 추출하는 단계는,
상기 제1 타겟 영역과 상기 제1 주변 영역과의 거리에 기초하여, 상기 제1 주변 영역에 적용되는 제1 가중치를 결정하는 단계;
상기 제2 타겟 영역과 상기 제2 주변 영역과의 거리에 기초하여, 상기 제2 주변 영역에 적용되는 제2 가중치를 결정하는 단계; 및,
상기 제1 가중치 및 제2 가중치를 적용하여, 상기 주변 특징들을 추출하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제19항에 있어서,
상기 제1 가중치를 결정하는 단계는,
상기 제1 타겟 영역과 상기 제1 주변 영역과의 거리가 가까울수록, 상기 제1 가중치를 큰 값으로 결정하는 단계를 포함하고,
상기 제2 가중치를 결정하는 단계는,
상기 제2 타겟 영역과 상기 제2 주변 영역과의 거리가 가까울수록 상기 제2 가중치를 큰 값으로 결정하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제15항에 있어서,
상기 주변 특징들을 추출하는 단계는,
상기 제1 타겟 영역의 특징과 상기 제1 주변 영역의 특징 사이의 제1 유사도에 기초하여, 상기 제1 주변 영역에 적용되는 제1 가중치를 결정하는 단계;
상기 제2 타겟 영역의 특징과 상기 제2 주변 영역의 특징 사이의 제2 유사도에 기초하여, 상기 제2 주변 영역에 적용되는 제2 가중치를 결정하는 단계; 및,
상기 제1 가중치 및 제2 가중치를 적용하여, 상기 주변 특징들을 추출하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제21항에 있어서,
상기 제1 가중치를 결정하는 단계는,
상기 제1 유사도가 클수록, 상기 제1 가중치를 큰 값으로 결정하는 단계를 포함하고,
상기 제2 가중치를 결정하는 단계는,
상기 제2 유사도가 클수록, 상기 제2 가중치를 큰 값으로 결정하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제14항에 있어서,
상기 제1 커널 세트 및 제2 커널 세트 각각은 복수의 커널들을 포함하고, 상기 복수의 커널들의 개수는 상기 복수의 입력 영상들의 개수와 동일한, 영상 처리 장치의 동작방법. - 제15항에 있어서,
상기 제1 커널 세트는 제1 커널 및 제2 커널을 포함하고, 상기 제2 커널 세트는 제3 커널 및 제4 커널을 포함하며,
상기 타겟 특징들을 추출하는 단계는,
상기 제1 타겟 영역과 상기 제1 커널의 컨볼루션 연산을 수행하여, 제1 타겟 특징을 추출하고, 상기 제2 타겟 영역과 상기 제2 커널의 컨볼루션 연산을 수행하여 제2 타겟 특징을 추출하는 단계를 포함하고,
상기 주변 특징들을 추출하는 단계는,
상기 제1 주변 영역과 상기 제3 커널의 컨볼루션 연산을 수행하여 제1 주변 특징을 추출하고, 상기 제2 주변 영역과 상기 제4 커널의 컨볼루션 연산을 수행하여 제2 주변 특징을 추출하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제14항에 있어서,
상기 출력 영상에서, 상기 타겟 영역들에 대응되는 영역의 특징을 결정하는 단계는,
상기 타겟 특징들 및 상기 주변 특징들과, 제3 커널과의 컨볼루션 연산을 수행함으로써, 상기 출력 영상에서, 상기 타겟 영역들에 대응되는 영역의 특징을 결정하는 단계를 포함하는, 영상 처리 장치의 동작방법. - 제14항에 있어서,
상기 복수의 입력 영상들은,
상기 하나 이상의 컨볼루션 뉴럴 네트워크에 포함되는 복수의 컨볼루션 레이어들 중 어느 하나에 입력되는, 복수의 프레임 영상들 및 복수의 특징 맵들 중 적어도 하나를 포함하는, 영상 처리 장치의 동작방법. - 복수의 입력 영상들 각각에서 동일한 위치를 가지는, 타겟 영역들의 특징들과 제1 커널 세트의 컨볼루션 연산을 수행하여, 타겟 특징들을 추출하는 단계;
상기 복수의 입력 영상들에서 상기 타겟 영역들의 주변에 위치하는, 주변 영역들의 특징들과 제2 커널 세트의 컨볼루션 연산을 수행하여, 주변 특징들을 추출하는 단계; 및
상기 타겟 특징들 및 상기 주변 특징들에 기초하여, 출력 영상에서, 상기 타겟 영역들에 대응되는 영역의 특징을 결정하는 단계를 수행하도록 하는 프로그램이 저장된 하나 이상의 컴퓨터로 읽을 수 있는 기록매체를 포함하는 컴퓨터 프로그램 제품.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180154691A KR20200067631A (ko) | 2018-12-04 | 2018-12-04 | 영상 처리 장치 및 그 동작방법 |
| PCT/KR2019/013588 WO2020116768A1 (ko) | 2018-12-04 | 2019-10-16 | 영상 처리 장치 및 그 동작방법 |
| US17/299,607 US11921822B2 (en) | 2018-12-04 | 2019-10-16 | Image processing device for improving details of an image, and operation method of the same |
| US18/427,442 US12443679B2 (en) | 2018-12-04 | 2024-01-30 | Image processing device for improving details of an image, and operation method of the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180154691A KR20200067631A (ko) | 2018-12-04 | 2018-12-04 | 영상 처리 장치 및 그 동작방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200067631A true KR20200067631A (ko) | 2020-06-12 |
Family
ID=70974354
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180154691A Pending KR20200067631A (ko) | 2018-12-04 | 2018-12-04 | 영상 처리 장치 및 그 동작방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US11921822B2 (ko) |
| KR (1) | KR20200067631A (ko) |
| WO (1) | WO2020116768A1 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102273377B1 (ko) * | 2020-12-14 | 2021-07-06 | 국방기술품질원 | 영상 합성 방법 |
| WO2022060001A1 (ko) * | 2020-09-18 | 2022-03-24 | 삼성전자 주식회사 | 영상 처리 장치 및 그 동작방법 |
| KR20220095533A (ko) * | 2020-12-30 | 2022-07-07 | 주식회사 쿠오핀 | 네트워크 프로세서와 컨볼루션 처리기를 갖는 디바이스용 신경망 처리기 |
| WO2022186499A1 (ko) * | 2021-03-04 | 2022-09-09 | 삼성전자 주식회사 | 영상 처리 장치 및 그 동작방법 |
| US12230008B2 (en) | 2021-11-19 | 2025-02-18 | Samsung Electronics Co., Ltd. | Image processing apparatus and operating method thereof |
| US12367555B2 (en) | 2021-03-04 | 2025-07-22 | Samsung Electronics Co., Ltd. | Image processing apparatus and operation method thereof |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102553146B1 (ko) * | 2018-09-13 | 2023-07-07 | 삼성전자주식회사 | 영상 처리 장치 및 그 동작방법 |
| KR20200067631A (ko) * | 2018-12-04 | 2020-06-12 | 삼성전자주식회사 | 영상 처리 장치 및 그 동작방법 |
| US12505595B2 (en) * | 2020-05-15 | 2025-12-23 | Nvidia Corporation | Content-aware style encoding using neural networks |
| CN112308837A (zh) * | 2020-10-30 | 2021-02-02 | 京东方科技集团股份有限公司 | 一种图像处理方法及装置、电子设备和可读存储介质 |
| KR102868126B1 (ko) * | 2020-12-10 | 2025-10-01 | 에스케이하이닉스 주식회사 | 이미지 센싱 장치 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4984261B2 (ja) | 2008-05-29 | 2012-07-25 | 大日本印刷株式会社 | 目標物検出システム |
| US8285068B2 (en) | 2008-06-25 | 2012-10-09 | Cisco Technology, Inc. | Combined deblocking and denoising filter |
| KR101716646B1 (ko) | 2013-01-10 | 2017-03-15 | 한국전자통신연구원 | 국부이진패턴을 이용한 객체 검출 인식 방법 및 장치 |
| KR102144994B1 (ko) | 2013-09-30 | 2020-08-14 | 삼성전자주식회사 | 영상의 노이즈를 저감하는 방법 및 이를 이용한 영상 처리 장치 |
| CN105850120B (zh) * | 2014-01-24 | 2017-11-10 | 奥林巴斯株式会社 | 立体内窥镜图像处理装置 |
| CA2944831C (en) * | 2014-05-30 | 2019-12-31 | Ventana Medical Systems, Inc. | An image processing method and system for analyzing a multi-channel image obtained from a biological tissue sample being stained by multiple stains |
| KR102367828B1 (ko) * | 2015-06-05 | 2022-02-25 | 삼성전자주식회사 | 이미지 운용 방법 및 이를 지원하는 전자 장치 |
| JP6614611B2 (ja) * | 2016-02-29 | 2019-12-04 | Kddi株式会社 | 画像間類似度を考慮して物体を追跡する装置、プログラム及び方法 |
| KR20180133394A (ko) * | 2016-04-06 | 2018-12-14 | 소니 주식회사 | 화상 처리 장치와 화상 처리 방법 |
| US10564715B2 (en) * | 2016-11-14 | 2020-02-18 | Google Llc | Dual-path foveated graphics pipeline |
| KR20180097944A (ko) * | 2017-02-24 | 2018-09-03 | 재단법인대구경북과학기술원 | 공유 특징맵을 이용한 다중 객체 추적 장치 및 그 방법 |
| CN108304761A (zh) * | 2017-09-25 | 2018-07-20 | 腾讯科技(深圳)有限公司 | 文本检测方法、装置、存储介质和计算机设备 |
| EP3724846A1 (en) * | 2017-12-19 | 2020-10-21 | Nokia Technologies Oy | Gaze dependent foveated rendering apparatus, method, computer program and system |
| US11354888B2 (en) * | 2018-11-16 | 2022-06-07 | GM Global Technology Operations LLC | Method and apparatus for a neural network |
| KR20200067631A (ko) * | 2018-12-04 | 2020-06-12 | 삼성전자주식회사 | 영상 처리 장치 및 그 동작방법 |
| US11048935B2 (en) * | 2019-01-28 | 2021-06-29 | Adobe Inc. | Generating shift-invariant neural network outputs |
| CN115004263A (zh) * | 2019-11-20 | 2022-09-02 | Oppo广东移动通信有限公司 | 人脸检测装置、方法和人脸解锁系统 |
| JP7333520B2 (ja) * | 2020-01-30 | 2023-08-25 | 富士通株式会社 | 学習プログラム、学習方法、及び情報処理装置 |
| CN111814871B (zh) * | 2020-06-13 | 2024-02-09 | 浙江大学 | 一种基于可靠权重最优传输的图像分类方法 |
| KR102883347B1 (ko) * | 2020-10-30 | 2025-11-07 | 삼성전자주식회사 | 영상 복원 방법 및 장치 |
| CN114267084B (zh) * | 2021-12-17 | 2025-09-19 | 北京沃东天骏信息技术有限公司 | 视频识别方法、装置、电子设备及存储介质 |
-
2018
- 2018-12-04 KR KR1020180154691A patent/KR20200067631A/ko active Pending
-
2019
- 2019-10-16 US US17/299,607 patent/US11921822B2/en active Active
- 2019-10-16 WO PCT/KR2019/013588 patent/WO2020116768A1/ko not_active Ceased
-
2024
- 2024-01-30 US US18/427,442 patent/US12443679B2/en active Active
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022060001A1 (ko) * | 2020-09-18 | 2022-03-24 | 삼성전자 주식회사 | 영상 처리 장치 및 그 동작방법 |
| KR20220037764A (ko) * | 2020-09-18 | 2022-03-25 | 삼성전자주식회사 | 영상 처리 장치 및 그 동작방법 |
| CN116210022A (zh) * | 2020-09-18 | 2023-06-02 | 三星电子株式会社 | 图像处理设备及其操作方法 |
| US12524836B2 (en) | 2020-09-18 | 2026-01-13 | Samsung Electronics Co., Ltd. | Image processing device and operating method therefor |
| KR102273377B1 (ko) * | 2020-12-14 | 2021-07-06 | 국방기술품질원 | 영상 합성 방법 |
| US11983843B2 (en) | 2020-12-14 | 2024-05-14 | Defense Agency For Technology And Quality | Method for synthesizing image |
| KR20220095533A (ko) * | 2020-12-30 | 2022-07-07 | 주식회사 쿠오핀 | 네트워크 프로세서와 컨볼루션 처리기를 갖는 디바이스용 신경망 처리기 |
| WO2022186499A1 (ko) * | 2021-03-04 | 2022-09-09 | 삼성전자 주식회사 | 영상 처리 장치 및 그 동작방법 |
| US12367555B2 (en) | 2021-03-04 | 2025-07-22 | Samsung Electronics Co., Ltd. | Image processing apparatus and operation method thereof |
| US12230008B2 (en) | 2021-11-19 | 2025-02-18 | Samsung Electronics Co., Ltd. | Image processing apparatus and operating method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240169031A1 (en) | 2024-05-23 |
| US11921822B2 (en) | 2024-03-05 |
| US12443679B2 (en) | 2025-10-14 |
| WO2020116768A1 (ko) | 2020-06-11 |
| US20220019844A1 (en) | 2022-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200067631A (ko) | 영상 처리 장치 및 그 동작방법 | |
| US11557085B2 (en) | Neural network processing for multi-object 3D modeling | |
| US10650283B2 (en) | Electronic apparatus and control method thereof | |
| KR102140805B1 (ko) | 위성 영상의 물체 식별을 위한 뉴럴 네트워크 학습 방법 및 장치 | |
| KR102570562B1 (ko) | 영상 처리 장치 및 그 동작방법 | |
| KR102236582B1 (ko) | 영상 처리 장치 및 그 동작방법 | |
| KR102824321B1 (ko) | 공간 인식 조건부 gan들을 이용하는 고해상도 제어가능한 얼굴 노화 | |
| US11875257B2 (en) | Normalization method for machine-learning and apparatus thereof | |
| US11380081B2 (en) | Image processing apparatus and operating method of the same | |
| US11961207B2 (en) | Image processing apparatus performing a deconvolution operation and operation method thereof | |
| KR20200015095A (ko) | 영상 처리 장치 및 그 동작방법 | |
| EP4083874B1 (en) | IMAGE PROCESSING DEVICE AND ITS OPERATING METHOD | |
| US12524836B2 (en) | Image processing device and operating method therefor | |
| Almeida et al. | Deep networks for human visual attention: A hybrid model using foveal vision | |
| US20210081756A1 (en) | Fractional convolutional kernels | |
| US12367555B2 (en) | Image processing apparatus and operation method thereof | |
| EP4276744A1 (en) | Image processing apparatus and operating method therefor | |
| KR102266903B1 (ko) | 영상 처리 장치 및 그 동작방법 | |
| KR20230034127A (ko) | 영상 처리 장치 및 그 동작 방법 | |
| KR20220125127A (ko) | 영상 처리 장치 및 그 동작방법 | |
| KR20210141304A (ko) | 영상 처리 장치 및 그 동작방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11 | Amendment of application requested |
Free format text: ST27 STATUS EVENT CODE: A-2-2-P10-P11-NAP-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13 | Application amended |
Free format text: ST27 STATUS EVENT CODE: A-2-2-P10-P13-NAP-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| D22 | Grant of ip right intended |
Free format text: ST27 STATUS EVENT CODE: A-1-2-D10-D22-EXM-PE0701 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |