KR20200069033A - 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 - Google Patents
굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 Download PDFInfo
- Publication number
- KR20200069033A KR20200069033A KR1020180156123A KR20180156123A KR20200069033A KR 20200069033 A KR20200069033 A KR 20200069033A KR 1020180156123 A KR1020180156123 A KR 1020180156123A KR 20180156123 A KR20180156123 A KR 20180156123A KR 20200069033 A KR20200069033 A KR 20200069033A
- Authority
- KR
- South Korea
- Prior art keywords
- walking
- prosthesis
- refractive
- descending
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/60—Artificial legs or feet or parts thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/60—Artificial legs or feet or parts thereof
- A61F2/604—Joints for artificial legs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/78—Means for protecting prostheses or for attaching them to the body, e.g. bandages, harnesses, straps, or stockings for the limb stump
- A61F2/80—Sockets, e.g. of suction type
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2002/5016—Prostheses not implantable in the body adjustable
- A61F2002/5018—Prostheses not implantable in the body adjustable for adjusting angular orientation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2002/5016—Prostheses not implantable in the body adjustable
- A61F2002/5036—Prostheses not implantable in the body adjustable self-adjustable, e.g. self-learning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2002/5038—Hinged joint, e.g. with transverse axle restricting the movement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
- A61F2002/701—Operating or control means electrical operated by electrically controlled means, e.g. solenoids or torque motors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
- A61F2/70—Operating or control means electrical
- A61F2002/704—Operating or control means electrical computer-controlled, e.g. robotic control
Landscapes
- Health & Medical Sciences (AREA)
- Transplantation (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Physiology (AREA)
- Dentistry (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Prostheses (AREA)
Abstract
Description
도 2는 도 1에 도시된 굴절보조장치를 나타낸다.
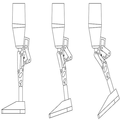
도 3은 도 1에 도시한 굴절보조장치를 구비하는 유사 능동형 대퇴 의족의 동작 예를 설명한다.
도 4는 본 발명에 따른 굴절보조장치를 구비하는 유사 능동형 대퇴 의족을 착용한 사람이 계단을 오르는 과정을 촬영한 사진이다.
도 5는 본 발명에 따른 굴절보조장치를 구비하는 유사 능동형 대퇴 의족의 제어방법을 나타내는 신호흐름도이다.
도 6은 도 5에 도시된 상승 계단 보행단계 및 하강 계단 보행단계를 실행하는 실시 예를 설명한다.
111: 소켓 112: 무릎 관절
113: 의족
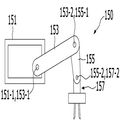
150: 굴절보조장치
151: 제1고정부 153: 제1링크바
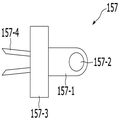
155: 제2링크바 157: 제2고정부
Claims (7)
- 착용자가 자신의 대퇴부를 삽입하여 고정하도록 하는 소켓, 지면과 접하는 의족 및 상기 소켓과 상기 의족의 각도를 조절하며 내부에 유동고정부 삽입 홀이 형성되어 있는 무릎 관절을 포함하는 수동형 대퇴 의족; 및
상기 수동형 대퇴 의족을 구성하는 상기 무릎 관절이 굴절되는 각도를 보조적으로 조정하는 굴절보조장치; 를 포함하는 것을 특징으로 하는 굴절보조장치를 구비하는 유사 능동형 대퇴 의족. - 제 1 항에 있어서, 상기 굴절보조장치는,
일 단이 상기 소켓에 고정되며, 내부에 모터가 설치되어 있는 제1고정부;
일 단에 형성된 제1-1회전축이 상기 제1고정부에 형성되어 있는 고정 회전축을 축으로 회전하는 제1링크바;
일 단에 형성된 제2-1회전축이 상기 제1링크바의 반대 단에 형성된 제1-2회전축을 축으로 회전하는 제2링크바; 및
일 단에 제3회전축이 형성되어 있는 회전부, 일 단이 상기 회전부의 반대 단과 결합한 베이스 및 일 단이 베이스에 고정되고 반대 단이 상기 유동고정부 삽입홀에 삽입되는 유동고정부를 포함하는 제2고정부; 를 포함하는 것을 특징으로 하는 굴절보조장치를 구비하는 유사 능동형 대퇴 의족. - 제 2 항에 있어서, 상기 제1링크바의 회전은 상기 제1고정부에 설치한 상기 모터의 회전방향 및 회전력을 조절하는 것을 특징으로 하는 굴절보조장치를 구비하는 유사 능등형 대퇴 의족.
- 제2항에서, 상기 유동고정부는,
상기 베이스로부터 멀어질수록 간격이 벌어지는 2개의 플레이트 또는 바로 구성되는 것을 특징으로 하는 굴절보조장치를 구비하는 유사 능동형 대퇴 의족. - 청구항 제1항 및 제2항에 기재된 굴절보조장치를 구비하는 유사 능동형 대퇴 의족(이하 대퇴 의족)의 동작을 제어하는 방법에 관한 것으로,
통상의 의족 제어프로세스에 따라 대퇴 의족을 제어하는 평지 보행단계;
평지를 걷던 상기 대퇴 의족의 착용자(이하 착용자)가 평지를 걷다가 계단을 맞닥뜨렸을 때, 이후에는 계단을 보행하게 될 것이라는 지시를 상기 대퇴 의족에 내리는 계단 판단단계;
상기 계단 판단단계에서 착용자가 계단보행 지시버튼을 눌렀다고 판단한 때에 수행되며, 계단이 상승 계단인지 아니면 하강 계단인지를 구분하는 상승하강 판단단계;
상기 상승하강 판단단계에서 상승 계단이라고 판단한 때에 수행되며, 상승 계단에서 상기 대퇴 의족의 무릎 관절의 굴절각을 평지 보행에서의 스윙각보다 크게 조절하여 상승 계단을 이동하는 상승 계단 보행단계; 및
상기 상승하강 판단단계에서 하강 계단이라고 판단한 때에 수행되며, 하강 계단에서 상기 대퇴 의족의 무릎 관절의 굴절각을 평지 보행에서의 스윙각보다 크게 조절하여 하강 계단을 이동하는 하강 계단 보행단계; 를
수행하는 것을 특징으로 하는 유사 능동형 대퇴 의족의 제어방법. - 제5항에서, 상기 상승 계단 보행단계에서는,
상승 계단의 초입에 건강한 발을 디디는 상승 계단 보행시작단계;
건강한 발을 계단의 초입에 고정한 후 상기 대퇴 의족의 스윙각 즉 상기 무릎 관절을 평지 보행 시의 최대 굴절각으로 굴절되도록 하는 스윙각 넓힘 단계;
상기 굴절보조장치를 이용하여 상기 무릎 관절의 굴절각을 평지를 이동할 때의 최대 굴절각에 추가로 굴절시키거나 펴는 과정을 수행하면서, 건강한 발과 상기 대퇴 의족을 착용한 발을 번갈아 가면서 상승 계단에 차례로 이동하여 상승 계단의 상부 이동하는 상승 계단 관절각 제어단계; 및
상기 대퇴 의족의 착용자의 지시 또는 착용자의 보행 패턴을 분석하여, 이어지는 진행로가 평지인 것으로 판단하여, 평지라고 판단한 때에는 상기 평지 보행단계를 수행하도록 하고, 상승 계단이라고 판단한 때에는 상기 상승 계단 관절각 제어단계를 계속하여 수행하도록 하는 평지보행 환원 판단단계; 를 수행하는 것을 특징으로 하는 유사 능동형 대퇴 의족의 제어방법. - 제5항에서, 상기 하강 계단 보행단계에서는,
하강 계단의 초입에 상기 대퇴 의족을 착용하지 않은 건강한 발로 디디는 하강 계단 보행시작단계;
상기 대퇴 의족의 스윙각 즉 상기 무릎 관절을 평지 보행 시의 최소 굴절각으로 굴절되도록 하면서, 건강한 발을 하강 계단에 고정한 후 상기 대퇴 의족을 이어지는 하강 계단에 올려놓는 스윙각 좁힘 단계;
상기 굴절보조장치를 이용하여 상기 무릎 관절의 굴절각을 평지를 이동할 때의 최대 굴절각에 추가로 굴절시키거나 펴는 과정을 수행하면서, 건강한 발과 상기 대퇴 의족을 착용한 발을 번갈아 가면서 하강 계단에 차례로 이동하여 하강 계단의 하부 이동하는 하강 계단 관절각 제어단계; 및
상기 대퇴 의족의 착용자의 지시 또는 착용자의 보행 패턴을 분석하여, 이어지는 진행로가 평지인 것으로 판단한 때에는 상기 평지 보행단계를 수행하도록 하고, 하강 계단이라고 판단한 때에는 상기 하강 계단 관절각 제어단계를 수행하도록 하는 평지보행 환원 판단단계; 를
수행하는 것을 특징으로 하는 유사 능동형 대퇴 의족의 제어방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180156123A KR20200069033A (ko) | 2018-12-06 | 2018-12-06 | 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 |
| PCT/KR2018/016184 WO2020116707A1 (ko) | 2018-12-06 | 2018-12-19 | 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180156123A KR20200069033A (ko) | 2018-12-06 | 2018-12-06 | 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200069033A true KR20200069033A (ko) | 2020-06-16 |
Family
ID=70973729
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180156123A Ceased KR20200069033A (ko) | 2018-12-06 | 2018-12-06 | 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR20200069033A (ko) |
| WO (1) | WO2020116707A1 (ko) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101478868B1 (ko) | 2008-05-28 | 2015-01-02 | 3디 시스템즈 인코오퍼레이티드 | 인공 사지 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19859931A1 (de) * | 1998-12-24 | 2000-07-06 | Biedermann Motech Gmbh | Beinprothese mit einem künstlichen Kniegelenk und Verfahren zur Steuerung einer Beinprothese |
| ES2659713T3 (es) * | 2008-04-30 | 2018-03-19 | Officine Ortopediche Rizzoli S.R.L. | Prótesis automática para personas con amputación por encima de la rodilla |
| JP6414664B2 (ja) * | 2014-06-13 | 2018-10-31 | 国立大学法人 筑波大学 | 義肢装着式動作補助装置 |
| AU2015360683B2 (en) * | 2014-12-08 | 2019-11-21 | Rehabilitation Institute Of Chicago | Powered and passive assistive device and related methods |
| KR101842465B1 (ko) * | 2016-10-20 | 2018-03-27 | 국방과학연구소 | 하지 외골격 로봇 및 그의 제어방법 |
-
2018
- 2018-12-06 KR KR1020180156123A patent/KR20200069033A/ko not_active Ceased
- 2018-12-19 WO PCT/KR2018/016184 patent/WO2020116707A1/ko not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101478868B1 (ko) | 2008-05-28 | 2015-01-02 | 3디 시스템즈 인코오퍼레이티드 | 인공 사지 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020116707A1 (ko) | 2020-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10290235B2 (en) | Rehabilitation using a prosthetic device | |
| RU2484789C2 (ru) | Способ управления ортопедическим суставом | |
| Bae et al. | A soft exosuit for patients with stroke: Feasibility study with a mobile off-board actuation unit | |
| JP5119440B2 (ja) | 股関節及び膝関節自動股義足 | |
| CN101437470B (zh) | 根据放松位置或测量的表面角度致动修复踝的系统和方法 | |
| Pai et al. | Center of mass velocity-position predictions for balance control | |
| US11219544B2 (en) | Walking motion assist device | |
| KR102578261B1 (ko) | 보행 보조 방법 및 이를 수행하는 장치들 | |
| Berry | Microprocessor prosthetic knees | |
| JP7215685B2 (ja) | 歩行を支援するためのシステム | |
| KR102281103B1 (ko) | 하이브리드형 의지 장치 및 그 제어 방법 | |
| JP2006314670A (ja) | 歩行補助装置及びリハビリテーションシステム | |
| WO2015190598A1 (ja) | 義肢装着式動作補助装置及び装着式動作補助装置 | |
| KR20200072880A (ko) | 보행 보조 방법 및 그 방법을 수행하는 보행 보조 장치 | |
| JP2023534427A5 (ko) | ||
| US12102584B2 (en) | Motorized assistance system | |
| JP2005230207A (ja) | 健脚制御大腿義足 | |
| KR20190142709A (ko) | 하지 보조로봇의 제어방법 | |
| Kestur et al. | Comparing the lower limb joint biomechanics of the Power Knee, C-Leg and Rheo Knee during ramp and stair ambulation | |
| KR102330974B1 (ko) | 중족지관절 보조장치 | |
| KR20200069033A (ko) | 굴절보조장치를 구비하는 유사 능동형 대퇴 의족 및 유사 능동형 대퇴 의족의 제어방법 | |
| Ko et al. | Comparison of ankle angle adaptations of prosthetic feet with and without adaptive ankle angle during level ground, ramp, and stair ambulations of a transtibial amputee: A pilot study | |
| KR101940898B1 (ko) | 외골격 로봇의 하강보행 제어 방법 | |
| KR102161533B1 (ko) | 높이 조절이 가능한 로봇 의족 장치 | |
| Herbert-Copley et al. | Evaluation of a variable resistance orthotic knee joint |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-3-3-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |