KR20200069096A - 전자 장치 및 이를 이용하여 오브젝트의 깊이 정보를 획득하는 방법 - Google Patents
전자 장치 및 이를 이용하여 오브젝트의 깊이 정보를 획득하는 방법 Download PDFInfo
- Publication number
- KR20200069096A KR20200069096A KR1020180156256A KR20180156256A KR20200069096A KR 20200069096 A KR20200069096 A KR 20200069096A KR 1020180156256 A KR1020180156256 A KR 1020180156256A KR 20180156256 A KR20180156256 A KR 20180156256A KR 20200069096 A KR20200069096 A KR 20200069096A
- Authority
- KR
- South Korea
- Prior art keywords
- electronic device
- illuminator
- processor
- light
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/536—Depth or shape recovery from perspective effects, e.g. by using vanishing points
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/22—Measuring arrangements characterised by the use of optical techniques for measuring depth
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/484—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/026—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness by measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J49/00—Particle spectrometers or separator tubes
- H01J49/26—Mass spectrometers or separator tubes
- H01J49/34—Dynamic spectrometers
- H01J49/40—Time-of-flight spectrometers
- H01J49/406—Time-of-flight spectrometers with multiple reflections
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/56—Cameras or camera modules comprising electronic image sensors; Control thereof provided with illuminating means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4868—Controlling received signal intensity or exposure of sensor
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/271—Image signal generators wherein the generated image signals comprise depth maps or disparity maps
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
Description
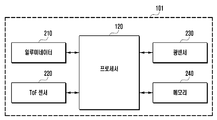
도 2는, 다양한 실시예들에 따른, 전자 장치(101)의 블럭도이다.
도 3은, 다양한 실시예들에 따른, 깊이 정보를 획득하는 방법을 나타내는 순서도이다.
도 4는, 다양한 실시예들에 따른, 깊이 정보를 획득하는 방법을 나타내는 순서도이다.
도 5는, 다양한 실시예들에 따른, 깊이 정보를 획득하는 방법을 나타내는 순서도이다.
도 6은, 다양한 실시예들에 따른, 깊이 정보를 획득하는 방법을 나타내는 순서도이다.
도 7은, 다양한 실시예들에 따른, 깊이 정보를 획득하는 방법을 나타내는 순서도이다.
도 8은, 일 실시예에 따른, 전자 장치(101)의 주변 환경 조건에 기초하여 설정 값을 조절하는 예를 나타내는 도면이다.
Claims (20)
- 전자 장치에 있어서,
제 1 지정된 파장 대역의 빛을 출력할 수 있는 일루미네이터;
제 1 지정된 파장 대역의 빛을 획득할 수 있는 ToF(time of flight) 센서;
제 2 지정된 파장 대역의 빛을 획득할 수 있는 광 센서; 및
프로세서를 포함하고, 상기 프로세서는,
상기 광 센서를 통해, 상기 전자 장치 주변의 광량을 측정하고,
상기 측정된 전자 장치 주변의 광량에 기반하여, 상기 일루미네이터에 공급할 제 1 전력량을 결정하고,
상기 제 1 전력량을 상기 일루미네이터에 공급하여, 상기 일루미네이터가 오브젝트를 향해 제 1 세기의 빛을 조사하도록 제어하고,
상기 ToF 센서를 통해, 상기 제 1 세기의 빛 중 상기 오브젝트에 의해 반사되는 빛의 적어도 일부를 획득하고,
상기 오브젝트에 의해 반사되는 빛의 적어도 일부를 이용하여 상기 오브젝트에 대한 깊이 정보를 획득하도록 설정된 전자 장치. - 제 1 항에 있어서, 상기 프로세서는,
상기 오브젝트에 의해 반사되는 빛의 적어도 일부에 기반하여, 상기 오브젝트와 상기 전자 장치 사이의 거리를 확인하고,
상기 확인된 거리에 따라 상기 일루미네이터의 모듈레이션 주파수 값을 조절하도록 설정된 전자 장치. - 제 2 항에 있어서, 상기 프로세서는,
상기 조절된 모듈레이션 주파수 값에 따라 상기 일루미네이터와 상기 ToF 센서를 동기화시키도록 설정된 전자 장치. - 제 2 항에 있어서, 상기 프로세서는,
상기 확인된 거리에 따라 상기 일루미네이터가 제 2 세기의 빛을 조사할 수 있도록, 상기 일루미네이터에 공급할 제 2 전력량을 결정하도록 설정된 전자 장치. - 제 1 항에 있어서, 상기 프로세서는,
상기 전자 장치 주변의 광량에 적어도 일부 기반하여, 상기 전자 장치의 위치 정보를 결정하도록 설정된 전자 장치. - 제 5 항에 있어서, 상기 프로세서는,
상기 전자 장치의 위치 정보에 따라 상기 일루미네이터가 제 2 세기의 빛을 조사할 수 있도록 상기 일루미네이터에 공급할 제 2 전력량을 결정하도록 설정된 전자 장치. - 제 1 항에 있어서, 상기 프로세서는,
상기 측정된 전자 장치 주변의 광량을 제 1 임계 값과 비교하고,
상기 비교 결과에 기초하여, 상기 제 1 전력량을 결정하도록 설정된 전자 장치. - 전자 장치에 있어서,
제 1 지정된 파장 대역의 빛을 출력할 수 있는 일루미네이터;
제 1 지정된 파장 대역의 빛을 획득할 수 있는 ToF(time of flight) 센서;
제 2 지정된 파장 대역의 빛을 획득할 수 있는 광 센서; 및
프로세서를 포함하고, 상기 프로세서는,
상기 광 센서를 통해, 상기 전자 장치 주변의 광량을 측정하고,
지정된 전력량에 기초하여, 상기 일루미네이터가 오브젝트를 향해 제 1 세기의 빛을 조사하도록 제어하고,
상기 ToF 센서를 통해, 상기 제 1 세기의 빛 중 상기 오브젝트에 의해 반사되는 빛의 적어도 일부를 획득하고,
상기 오브젝트에 의해 반사되는 빛의 적어도 일부에 기반하여, 상기 오브젝트와 상기 전자 장치 사이의 거리를 확인하고,
상기 전자 장치 주변의 광량 및 상기 오브젝트와 상기 전자 장치 사이의 거리에 기초하여 상기 일루미네이터에 공급할 전력량 또는 상기 일루미네이터의 모듈레이션 주파수 값 중 적어도 하나를 결정하고,
상기 오브젝트에 대한 깊이 정보를 획득하도록 설정된 전자 장치. - 제 8 항에 있어서, 상기 프로세서는,
상기 조절된 모듈레이션 주파수 값에 따라 상기 일루미네이터와 상기 ToF 센서를 동기화시키도록 설정된 전자 장치. - 제 8 항에 있어서, 상기 프로세서는,
상기 전자 장치 주변의 광량에 적어도 일부 기반하여, 상기 전자 장치의 위치 정보를 결정하도록 설정된 전자 장치. - 제 10 항에 있어서, 상기 프로세서는,
상기 전자 장치의 위치 정보에 적어도 일부 기초하여 상기 일루미네이터에 공급할 전력량 또는 상기 일루미네이터의 모듈레이션 주파수 값 중 적어도 하나를 결정하도록 설정된 전자 장치. - 제 8 항에 있어서, 상기 프로세서는,
상기 측정된 전자 장치 주변의 광량을 지정된 제 1 임계 값과 비교하고,
상기 비교 결과에 기초하여, 상기 일루미네이터에 공급할 전력량을 결정하도록 설정된 전자 장치. - 제 8 항에 있어서, 상기 프로세서는,
상기 오브젝트와 상기 전자 장치 사이의 거리를 지정된 제 1 거리와 비교하고,
상기 비교 결과에 기초하여, 상기 일루미네이터의 모듈레이션 주파수 값을 결정하도록 설정된 전자 장치. - 전자 장치에 있어서,
제 1 지정된 파장 대역의 빛을 출력할 수 있는 일루미네이터;
제 1 지정된 파장 대역의 빛을 획득할 수 있는 ToF(time of flight) 센서; 및
프로세서를 포함하고, 상기 프로세서는,
상기 ToF 센서를 통해, 상기 전자 장치 주변의 광량을 측정하고,
상기 측정된 전자 장치 주변의 광량에 기반하여, 상기 일루미네이터에 공급할 제 1 전력량을 결정하고,
상기 제 1 전력량을 상기 일루미네이터에 공급하여, 상기 일루미네이터가 오브젝트를 향해 제 1 세기의 빛을 조사하도록 제어하고,
상기 ToF 센서를 통해, 상기 제 1 세기의 빛 중 상기 오브젝트에 의해 반사되는 빛의 적어도 일부를 획득하고,
상기 오브젝트에 의해 반사되는 빛의 적어도 일부를 이용하여 상기 오브젝트에 대한 깊이 정보를 획득하도록 설정된 전자 장치. - 제 14 항에 있어서, 상기 프로세서는,
상기 오브젝트에 의해 반사되는 빛의 적어도 일부에 기반하여, 상기 오브젝트와 상기 전자 장치 사이의 거리를 확인하고,
상기 확인된 거리에 따라 상기 일루미네이터의 모듈레이션 주파수 값을 조절하도록 설정된 전자 장치. - 제 15 항에 있어서, 상기 프로세서는,
상기 조절된 모듈레이션 주파수 값에 따라 상기 일루미네이터와 상기 ToF 센서를 동기화시키도록 설정된 전자 장치. - 제 15 항에 있어서, 상기 프로세서는,
상기 확인된 거리에 따라 상기 일루미네이터가 제 2 세기의 빛을 조사할 수 있도록, 상기 일루미네이터에 공급할 제 2 전력량을 결정하도록 설정된 전자 장치. - 제 14 항에 있어서, 상기 프로세서는,
상기 전자 장치 주변의 광량에 적어도 일부 기반하여, 상기 전자 장치의 위치 정보를 결정하도록 설정된 전자 장치. - 제 18 항에 있어서, 상기 프로세서는,
상기 전자 장치의 위치 정보에 따라 상기 일루미네이터가 제 2 세기의 빛을 조사할 수 있도록 상기 일루미네이터에 공급할 제 2 전력량을 결정하도록 설정된 전자 장치. - 제 14 항에 있어서, 상기 프로세서는,
상기 측정된 전자 장치 주변의 광량을 제 1 임계 값과 비교하고,
상기 비교 결과에 기초하여, 상기 제 1 전력량을 결정하도록 설정된 전자 장치.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180156256A KR20200069096A (ko) | 2018-12-06 | 2018-12-06 | 전자 장치 및 이를 이용하여 오브젝트의 깊이 정보를 획득하는 방법 |
| PCT/KR2019/012168 WO2020116754A1 (en) | 2018-12-06 | 2019-09-19 | Electronic device and method for acquiring depth information of object using the same |
| US16/577,204 US20200184664A1 (en) | 2018-12-06 | 2019-09-20 | Electronic device and method for acquiring depth information of object by using the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180156256A KR20200069096A (ko) | 2018-12-06 | 2018-12-06 | 전자 장치 및 이를 이용하여 오브젝트의 깊이 정보를 획득하는 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200069096A true KR20200069096A (ko) | 2020-06-16 |
Family
ID=70970321
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180156256A Abandoned KR20200069096A (ko) | 2018-12-06 | 2018-12-06 | 전자 장치 및 이를 이용하여 오브젝트의 깊이 정보를 획득하는 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200184664A1 (ko) |
| KR (1) | KR20200069096A (ko) |
| WO (1) | WO2020116754A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12013662B2 (en) | 2020-12-08 | 2024-06-18 | Electronics And Telecommunications Research Institute | Apparatus for analyzing depth of holographic image and analyzing method thereof |
| US12367646B2 (en) | 2021-09-03 | 2025-07-22 | Samsung Electronics Co., Ltd. | Augmented reality device and method for obtaining depth map by using depth sensor |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102794864B1 (ko) * | 2019-11-14 | 2025-04-14 | 삼성전자주식회사 | 카메라를 포함하는 전자 장치 및 그의 방법 |
| JP2021085821A (ja) * | 2019-11-29 | 2021-06-03 | ソニーセミコンダクタソリューションズ株式会社 | 測距センサ、測距システム、および、電子機器 |
| CN111766591A (zh) * | 2020-07-16 | 2020-10-13 | 维霖通(上海)通信技术有限公司 | 一种基于tof传感器的高精度蓝牙ble测距系统 |
| CN115225834A (zh) | 2021-04-21 | 2022-10-21 | 三星电子株式会社 | 用于改变合并模式的深度传感器和图像信号处理器 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8681255B2 (en) * | 2010-09-28 | 2014-03-25 | Microsoft Corporation | Integrated low power depth camera and projection device |
| US9297889B2 (en) * | 2012-08-14 | 2016-03-29 | Microsoft Technology Licensing, Llc | Illumination light projection for a depth camera |
| US8879050B2 (en) * | 2012-12-04 | 2014-11-04 | Texas Instruments Incorporated | Method for dynamically adjusting the operating parameters of a TOF camera according to vehicle speed |
| US10145678B2 (en) * | 2015-04-20 | 2018-12-04 | Samsung Electronics Co., Ltd. | CMOS image sensor for depth measurement using triangulation with point scan |
| KR102673811B1 (ko) * | 2016-08-31 | 2024-06-10 | 삼성전자주식회사 | 광 스캐닝 장치 및 광 스캐닝 장치를 포함하는 라이다 시스템 |
-
2018
- 2018-12-06 KR KR1020180156256A patent/KR20200069096A/ko not_active Abandoned
-
2019
- 2019-09-19 WO PCT/KR2019/012168 patent/WO2020116754A1/en not_active Ceased
- 2019-09-20 US US16/577,204 patent/US20200184664A1/en not_active Abandoned
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12013662B2 (en) | 2020-12-08 | 2024-06-18 | Electronics And Telecommunications Research Institute | Apparatus for analyzing depth of holographic image and analyzing method thereof |
| US12367646B2 (en) | 2021-09-03 | 2025-07-22 | Samsung Electronics Co., Ltd. | Augmented reality device and method for obtaining depth map by using depth sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200184664A1 (en) | 2020-06-11 |
| WO2020116754A1 (en) | 2020-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200069096A (ko) | 전자 장치 및 이를 이용하여 오브젝트의 깊이 정보를 획득하는 방법 | |
| US11102409B2 (en) | Electronic device and method for obtaining images | |
| KR102552923B1 (ko) | 복수의 카메라들 또는 깊이 센서 중 적어도 하나를 이용하여 깊이 정보를 획득하는 전자 장치 | |
| US12055662B2 (en) | Electronic device including sensor and method of operation therefor | |
| US11258962B2 (en) | Electronic device, method, and computer-readable medium for providing bokeh effect in video | |
| CN113767359B (zh) | 使用显示器的光获取生物特征信息的方法及电子装置 | |
| US20220268935A1 (en) | Electronic device comprising camera and method thereof | |
| KR20200038111A (ko) | 전자 장치 및 제스처 인식 방법 | |
| US20200280668A1 (en) | Electronic device for controlling camera on basis of external light, and control method therefor | |
| US12360221B2 (en) | Electronic device and method for compensating for depth error according to modulation frequency | |
| US20190222742A1 (en) | Electronic device and method for controlling autofocus of camera | |
| US12069382B2 (en) | Electronic device and method for generating images by performing auto white balance | |
| US20220021178A1 (en) | Electronic device and method for controlling output of light sources of electronic device | |
| KR20210101416A (ko) | 이미지 센서 제어 방법 및 장치 | |
| US11297266B2 (en) | Electronic device and method for obtaining data from second image sensor by means of signal provided from first image sensor | |
| EP3718297B1 (en) | Method for adjusting focus based on spread-level of display object and electronic device supporting the same | |
| KR20200117460A (ko) | 전자 장치 및 그의 발열 제어 방법 | |
| KR20200101803A (ko) | 뎁스 맵을 생성하는 전자 장치 및 방법 | |
| KR20200074780A (ko) | 이미지 처리 방법 및 그 전자 장치 | |
| EP4087232A1 (en) | Electronic device, and method for performing autofocus | |
| US12177575B2 (en) | Photographing method of electronic apparatus and electronic apparatus thereof | |
| KR102724464B1 (ko) | 디스플레이 아래에 배치된 센서의 성능을 보완하는 방법 및 이를 수행하는 전자 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| PC1904 | Unpaid initial registration fee |
St.27 status event code: A-2-2-U10-U13-oth-PC1904 St.27 status event code: N-2-6-B10-B12-nap-PC1904 |