KR20200071565A - 포인트 클라우드를 생성하는 방법 및 장치 - Google Patents
포인트 클라우드를 생성하는 방법 및 장치 Download PDFInfo
- Publication number
- KR20200071565A KR20200071565A KR1020180159431A KR20180159431A KR20200071565A KR 20200071565 A KR20200071565 A KR 20200071565A KR 1020180159431 A KR1020180159431 A KR 1020180159431A KR 20180159431 A KR20180159431 A KR 20180159431A KR 20200071565 A KR20200071565 A KR 20200071565A
- Authority
- KR
- South Korea
- Prior art keywords
- depth
- image
- color
- color information
- point cloud
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
- G06T17/20—Finite element generation, e.g. wire-frame surface description, tesselation
-
- G06T5/001—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/90—Dynamic range modification of images or parts thereof
- G06T5/94—Dynamic range modification of images or parts thereof based on local image properties, e.g. for local contrast enhancement
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/90—Determination of colour characteristics
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/416—Exact reconstruction
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computer Graphics (AREA)
- Geometry (AREA)
- Software Systems (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
Description
도 2는 대상체에 대한 색상 정보를 나타내는 색상 정보 영상 및 깊이 정보를 나타내는 깊이 영상의 예를 도시한다.
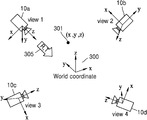
도 3은 복수의 카메라들에 대한 캘리브레이션을 설명하기 위한 도면이다.
도 4a 및 4b는 실측 자료 오브젝트(ground truth object)를 이용하여 카메라들에 대한 캘리브레이션을 수행하는 방법을 설명하기 위한 도면이다.
도 5는 복수의 카메라들에 대한 동기화(synchronization)를 설명하기 위한 도면이다.
도 6은 카메라들에 의해 캡쳐되는 프레임들을 샘플링하는 방법을 설명하기 위한 도면이다.
도 7, 8, 9, 10a 및 10b는 대상체를 나타내는 전경(foreground) 영역을 결정하기 위한 방법을 설명하기 위한 도면이다.
도 11, 12 및 13은 색상 정보를 이용하여 깊이 영상을 보정하는 방법을 설명하기 위한 도면이다.
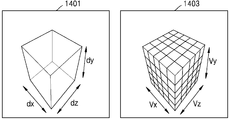
도 14 및 15는 서로 다른 시점에서 캡쳐된 대상체에 대한 깊이 영상들을 조합하는 방법을 설명하기 위한 도면이다.
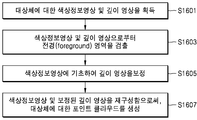
도 16은 본 개시의 다양한 실시 예들에 따라 포인트 클라우드를 생성하는 방법의 흐름도를 도시한다.
도 17은 본 개시의 다양한 실시 예들에 따라 깊이 영상을 보정하는 방법의 구체화된 흐름도를 도시한다.

Claims (21)
- 대상체에 대한 색상 정보를 나타내는 색상 정보 영상 및 깊이 정보를 나타내는 깊이 영상을 획득하는 단계;
상기 색상 정보 영상 및 상기 깊이 영상으로부터 상기 대상체를 나타내는 영역을 검출하는 단계;
상기 검출된 영역 내에 포함되는 상기 색상 정보 영상에 기초하여, 상기 깊이 영상을보정하는 단계; 및
상기 색상 정보 영상 및 상기 보정된 깊이 영상을 재구성함으로써, 상기 대상체에 대한 포인트 클라우드를 생성하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 제1 항에 있어서,
상기 깊이 영상을 보정하는 단계는,
상기 색상 정보 영상에 포함되는 블록 내의 픽셀들의 색상 정보에 기초하여, 상기 픽셀들에 대한 색상 기반-가중치 맵을 생성하는 단계;
상기 깊이 영상 및 상기 색상 기반-가중치 맵에 기초하여, 상기 블록에 대응하는 로컬 평면을 추정하는 단계;
상기 깊이 영상 및 상기 추정된 로컬 평면에 기초하여 깊이 기반-가중치 맵을 생성하고, 상기 깊이 영상 및 상기 깊이 기반-가중치 맵에 기초하여 로컬 평면을 추정하는 동작을 반복하여 수행하는 단계; 및
상기 로컬 평면을 추정하는 동작을 반복하여 수행한 결과에 기초하여 최종적으로 추정된 로컬 평면의 깊이 값들을 이용하여, 상기 깊이 영상을 보정하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 제2 항에 있어서,
상기 픽셀들에 대한 색상 기반-가중치 맵을 생성하는 단계는,
상기 블록에 포함되는 중심 픽셀로부터 다른 픽셀들까지의 거리 및 상기 중심 픽셀의 색상 값과 다른 픽셀들의 색상 값들의 차이에 기초하여, 상기 픽셀들에 대한 가중치를 계산하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 제2 항에 있어서,
상기 깊이 영상 및 상기 색상 기반-가중치 맵에 기초하여, 상기 블록에 대응하는 로컬 평면을 추정하는 단계는,
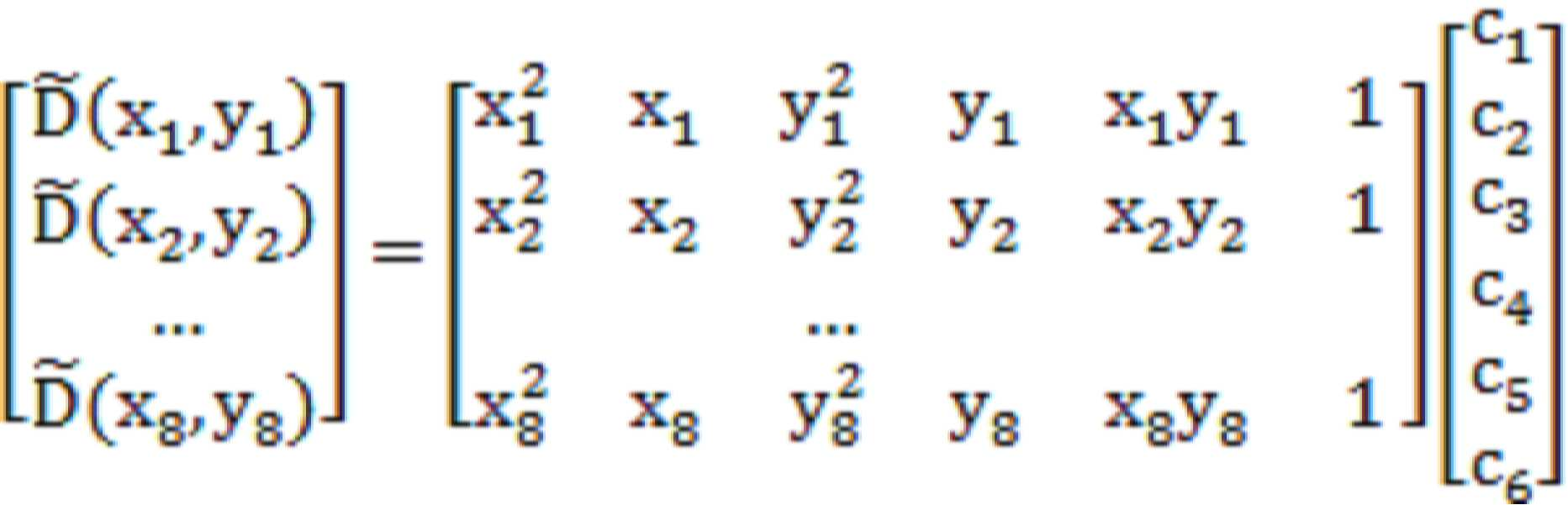
상기 색상 기반-가중치 맵에 기초하여, 상기 깊이 영상과의 오차를 최소화하는 이차 곡면 평면을 상기 로컬 평면으로서 추정하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 제2 항에 있어서,
상기 깊이 기반-가중치 맵을 생성하고 상기 로컬 평면을 추정하는 동작을 반복하여 수행하는 단계는,
상기 깊이 영상 및 상기 추정된 로컬 평면에 기초하여 상기 깊이 기반-가중치 맵을 생성하는 단계;
상기 깊이 기반-가중치 맵에 기초하여, 상기 깊이 영상과의 오차를 최소화하는 이차 곡면 평면을 상기 로컬 평면으로서 추정하는 단계; 및
상기 깊이 영상과 상기 추정된 로컬 평면 간의 오차가 임계 범위 내에 포함될 때까지, 상기 깊이 기반-가중치 맵을 생성하는 단계 및 상기 깊이 기반-가중치 맵에 기초하여 상기 로컬 평면을 추정하는 단계를 반복하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 제2 항에 있어서,
상기 깊이 영상을 보정하는 단계는,
상기 색상 정보 영상을 픽셀의 색상 정보에 기초하여, 복수의 블록들로 분할하는 단계; 및
상기 복수의 블록들 중 하나인 상기 블록에 포함되는 픽셀들의 좌표 값들의 산술 평균값을 갖는 픽셀을 중심 픽셀로서 결정하는 단계를 더 포함하는, 포인트 클라우드 생성 방법. - 제1 항에 있어서,
상기 포인트 클라우드를 생성하는 단계는,
상기 보정된 깊이 영상으로부터 소정 개수의 픽셀들을 선택하는 단계;
상기 색상 정보 영상으로부터 상기 선택된 픽셀들에 대응하는 색상 값들을 획득하는 단계;
상기 선택된 포인트들에 대한 깊이 값들과 상기 색상 값들을 매칭시킴으로써, 상기 소정 개수의 포인트들을 포함하는 상기 포인트 클라우드를 생성하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 제1 항에 있어서,
상기 대상체에 대한 색상 정보 영상 및 깊이 영상을 획득하는 복수의 카메라들 각각의 좌표계를 공통 좌표계로 변환하기 위한, 회전 정보(rotation information) 및 이동 정보(translation information)를 획득하는 캘리브레이션 단계를 더 포함하는, 포인트 클라우드 생성 방법. - 제1 항에 있어서,
상기 색상 정보 영상 및 상기 깊이 영상을 획득하는 단계는,
복수의 카메라들을 통해서 상기 대상체에 대한 복수의 색상 정보 영상 프레임 세트들 및 깊이 영상 프레임 세트들을 캡쳐하는 단계;
상기 복수의 색상 정보 영상 프레임 세트들 및 깊이 영상 프레임 세트들을 캡쳐하는 동시에, 상기 복수의 카메라들을 통해서 오디오 신호들을 녹음하는 단계; 및
상기 복수의 카메라들에서 녹음된 상기 오디오 신호들 간의 상관 관계(cross correlation)에 기초하여, 상기 복수의 색상 정보 영상 프레임 세트들 및 깊이 영상 프레임 세트들을 동기화(synchronization)하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 제1 항에 있어서,
상기 대상체를 나타내는 영역을 검출하는 단계는,
상기 대상체가 없는 배경을 캡쳐한 배경 색상 영상으로부터 상기 색상 정보 영상을 제한 색상 차 영상(color difference image)을 획득하는 단계;
상기 대상체가 없는 배경을 캡쳐한 배경 깊이 영상으로부터 상기 깊이 영상을 제한 깊이 차 영상(depth difference image)을 획득하는 단계; 및
상기 색상 차 영상 및 상기 깊이 차 영상을 조합함으로써, 상기 대상체를 나타내는 영역을 결정하는 단계를 포함하는, 포인트 클라우드 생성 방법. - 복수의 카메라들로부터 대상체에 대한 색상 정보를 나타내는 색상 정보 영상 및 깊이 정보를 나타내는 깊이 영상을 획득하는, 통신부; 및
상기 색상 정보 영상 및 상기 깊이 영상으로부터 상기 대상체를 나타내는 영역을 검출하고, 상기 검출된 영역 내에 포함되는 상기 색상 정보 영상에 기초하여, 상기 깊이 영상을보정하고, 상기 색상 정보 영상 및 상기 보정된 깊이 영상을 재구성함으로써, 상기 대상체에 대한 포인트 클라우드를 생성하는, 적어도 하나의 프로세서를 포함하는, 포인트 클라우드 생성 장치. - 제11 항에 있어서,
상기 적어도 하나의 프로세서는,
상기 색상 정보 영상에 포함되는 블록 내의 픽셀들의 색상 정보에 기초하여, 상기 픽셀들에 대한 색상 기반-가중치 맵을 생성하고, 상기 깊이 영상 및 상기 색상 기반-가중치 맵에 기초하여, 상기 블록에 대응하는 로컬 평면을 추정하고,
상기 깊이 영상 및 상기 추정된 로컬 평면에 기초하여 깊이 기반-가중치 맵을 생성하는 동작 및 상기 깊이 영상 및 상기 깊이 기반-가중치 맵에 기초하여 로컬 평면을 추정하는 동작을 반복하여 수행하고,
상기 로컬 평면을 추정하는 동작을 반복하여 수행한 결과에 기초하여 최종적으로 추정된 로컬 평면의 깊이 값들을 이용하여, 상기 깊이 영상을 보정하는, 포인트 클라우드 생성 장치. - 제12 항에 있어서,
상기 적어도 하나의 프로세서는, 상기 픽셀들에 대한 색상 기반-가중치 맵을 생성함에 있어서,
상기 블록에 포함되는 중심 픽셀로부터 다른 픽셀들까지의 거리 및 상기 중심 픽셀의 색상 값과 다른 픽셀들의 색상 값들의 차이에 기초하여, 상기 픽셀들에 대한 가중치를 계산하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 제12 항에 있어서,
상기 적어도 하나의 프로세서는, 상기 깊이 영상 및 상기 색상 기반-가중치 맵에 기초하여 상기 블록에 대응하는 로컬 평면을 추정함에 있어서,
상기 색상 기반-가중치 맵에 기초하여, 상기 깊이 영상과의 오차를 최소화하는 이차 곡면 평면을 상기 로컬 평면으로서 추정하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 제12 항에 있어서,
상기 적어도 하나의 프로세서는, 상기 깊이 기반-가중치 맵을 생성하는 동작 및 상기 로컬 평면을 추정하는 동작을 반복하여 수행함에 있어서,
상기 깊이 영상 및 상기 추정된 로컬 평면에 기초하여 상기 깊이 기반-가중치 맵을 생성하고,
상기 깊이 기반-가중치 맵에 기초하여, 상기 깊이 영상과의 오차를 최소화하는 이차 곡면 평면을 상기 로컬 평면으로서 추정하고,
상기 깊이 영상과 상기 추정된 로컬 평면 간의 오차가 임계 범위 내에 포함될 때까지, 상기 깊이 기반-가중치 맵을 생성하는 동작 및 상기 깊이 기반-가중치 맵에 기초하여 상기 로컬 평면을 추정하는 동작을 반복하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 제12 항에 있어서,
상기 적어도 하나의 프로세서는, 상기 깊이 영상을 보정함에 있어서,
상기 색상 정보 영상을 픽셀의 색상 정보에 기초하여, 복수의 블록들로 분할하고,
상기 복수의 블록들 중 하나인 상기 블록에 포함되는 픽셀들의 좌표 값들의 산술 평균값을 갖는 픽셀을 중심 픽셀로서 결정하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 제11 항에 있어서,
상기 적어도 하나의 프로세서는, 상기 포인트 클라우드를 생성함에 있어서,
상기 보정된 깊이 영상으로부터 소정 개수의 픽셀들을 선택하고, 상기 색상 정보 영상으로부터 상기 선택된 픽셀들에 대응하는 색상 값들을 획득하고,
상기 선택된 포인트들에 대한 깊이 값들과 상기 색상 값들을 매칭시킴으로써, 상기 소정 개수의 포인트들을 포함하는 상기 포인트 클라우드를 생성하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 제11 항에 있어서,
상기 적어도 하나의 프로세서는, 상기 대상체에 대한 색상 정보 영상 및 깊이 영상을 획득하는 복수의 카메라들 각각의 좌표계를 공통 좌표계로 변환하기 위한, 회전 정보(rotation information) 및 이동 정보(translation information)를 획득하는 캘리브레이션을 수행하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 제11 항에 있어서,
상기 통신부는, 상기 색상 정보 영상 및 상기 깊이 영상을 획득함에 있어서,
복수의 카메라들을 통해서 상기 대상체에 대한 복수의 색상 정보 영상 프레임 세트들 및 깊이 영상 프레임 세트들을 캡쳐하고,
상기 복수의 색상 정보 영상 프레임 세트들 및 깊이 영상 프레임 세트들을 캡쳐하는 동시에, 상기 복수의 카메라들을 통해서 오디오 신호들을 녹음하고,
상기 적어도 하나의 프로세서는,
상기 복수의 카메라들에서 녹음된 상기 오디오 신호들 간의 상관 관계(cross correlation)에 기초하여, 상기 복수의 색상 정보 영상 프레임 세트들 및 깊이 영상 프레임 세트들을 동기화(synchronization)하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 제11 항에 있어서,
상기 적어도 하나의 프로세서는, 상기 대상체를 나타내는 영역을 검출함에 있어서,
상기 대상체가 없는 배경을 캡쳐한 배경 색상 영상으로부터 상기 색상 정보 영상을 제한 색상 차 영상(color difference image)을 획득하고, 상기 대상체가 없는 배경을 캡쳐한 배경 깊이 영상으로부터 상기 깊이 영상을 제한 깊이 차 영상(depth difference image)을 획득하고, 상기 색상 차 영상 및 상기 깊이 차 영상을 조합함으로써, 상기 대상체를 나타내는 영역을 결정하는 것을 특징으로 하는, 포인트 클라우드 생성 장치. - 포인트 클라우드 생성 방법을 수행하도록 하는 프로그램이 저장된 하나 이상의 컴퓨터로 읽을 수 있는 기록매체를 포함하는 컴퓨터 프로그램 제품에 있어서, 상기 포인트 클라우드 생성 방법은,
대상체에 대한 색상 정보를 나타내는 색상 정보 영상 및 깊이 정보를 나타내는 깊이 영상을 획득하는 단계;
상기 색상 정보 영상 및 상기 깊이 영상으로부터 상기 대상체를 나타내는 영역을 검출하는 단계;
상기 검출된 영역 내에 포함되는 상기 색상 정보 영상에 기초하여, 상기 깊이 영상을보정하는 단계; 및
상기 색상 정보 영상 및 상기 보정된 깊이 영상을 재구성함으로써, 상기 대상체에 대한 포인트 클라우드를 생성하는 단계를 포함하는, 컴퓨터 프로그램 제품.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180159431A KR102525030B1 (ko) | 2018-12-11 | 2018-12-11 | 포인트 클라우드를 생성하는 방법 및 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180159431A KR102525030B1 (ko) | 2018-12-11 | 2018-12-11 | 포인트 클라우드를 생성하는 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200071565A true KR20200071565A (ko) | 2020-06-19 |
| KR102525030B1 KR102525030B1 (ko) | 2023-04-24 |
Family
ID=71137385
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180159431A Active KR102525030B1 (ko) | 2018-12-11 | 2018-12-11 | 포인트 클라우드를 생성하는 방법 및 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102525030B1 (ko) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111784834A (zh) * | 2020-06-24 | 2020-10-16 | 北京百度网讯科技有限公司 | 一种点云地图生成方法、装置以及电子设备 |
| KR102393345B1 (ko) * | 2021-12-28 | 2022-05-02 | 주식회사 맥스트 | 3차원 점군 처리 시스템 및 방법 |
| KR102401831B1 (ko) * | 2021-02-23 | 2022-05-24 | 한남대학교 산학협력단 | Rgbd 센서를 이용한 3d 모델복원 방법 |
| KR20220119826A (ko) * | 2021-02-22 | 2022-08-30 | 한국전자통신연구원 | 다시점 영상으로부터의 깊이지도 생성 장치 및 방법 |
| CN115035235A (zh) * | 2021-03-05 | 2022-09-09 | 华为技术有限公司 | 三维重建方法及装置 |
| WO2023033565A1 (ko) * | 2021-09-03 | 2023-03-09 | 삼성전자 주식회사 | 깊이 센서를 이용하여 깊이 맵을 획득하는 증강 현실 디바이스 및 방법 |
| KR20230138686A (ko) * | 2022-03-24 | 2023-10-05 | 주식회사 팀엘리시움 | 척추 정렬 상태를 예측하는 방법 |
| KR102684338B1 (ko) * | 2023-06-07 | 2024-07-12 | 하혜주 | 크로마키합성을 혁신한 인공지능 기반 촬영대행 서비스 제공 시스템 |
| CN120063287A (zh) * | 2025-04-24 | 2025-05-30 | 山东建筑大学 | 一种动态环境自适应的智能导航方法及系统 |
| US12367646B2 (en) | 2021-09-03 | 2025-07-22 | Samsung Electronics Co., Ltd. | Augmented reality device and method for obtaining depth map by using depth sensor |
| KR102885253B1 (ko) * | 2025-07-07 | 2025-11-12 | 소울아트 주식회사 | 포인트 클라우드의 캘리브레이션을 통한 객체의 모션 캡쳐용 정보 획득방법, 컴퓨팅 장치 및 컴퓨터 프로그램 |
| CN121465502A (zh) * | 2026-01-07 | 2026-02-06 | 浙江大学 | 一种智能化电子压舌板以及高精度三维口腔成像方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015029934A1 (ja) * | 2013-08-30 | 2015-03-05 | クラリオン株式会社 | カメラ校正装置、カメラ校正システム、及びカメラ校正方法 |
| KR101721085B1 (ko) * | 2016-05-02 | 2017-03-29 | 고려대학교 산학협력단 | 촬영 장치 및 센서의 시간 동기화 장치 및 방법 |
| US20170372479A1 (en) * | 2016-06-23 | 2017-12-28 | Intel Corporation | Segmentation of objects in videos using color and depth information |
-
2018
- 2018-12-11 KR KR1020180159431A patent/KR102525030B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015029934A1 (ja) * | 2013-08-30 | 2015-03-05 | クラリオン株式会社 | カメラ校正装置、カメラ校正システム、及びカメラ校正方法 |
| KR101721085B1 (ko) * | 2016-05-02 | 2017-03-29 | 고려대학교 산학협력단 | 촬영 장치 및 센서의 시간 동기화 장치 및 방법 |
| US20170372479A1 (en) * | 2016-06-23 | 2017-12-28 | Intel Corporation | Segmentation of objects in videos using color and depth information |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111784834A (zh) * | 2020-06-24 | 2020-10-16 | 北京百度网讯科技有限公司 | 一种点云地图生成方法、装置以及电子设备 |
| US12073576B2 (en) | 2021-02-22 | 2024-08-27 | Electronics And Telecommunications Research Institute | Apparatus and method for generating depth map from multi-view image |
| KR20220119826A (ko) * | 2021-02-22 | 2022-08-30 | 한국전자통신연구원 | 다시점 영상으로부터의 깊이지도 생성 장치 및 방법 |
| KR102401831B1 (ko) * | 2021-02-23 | 2022-05-24 | 한남대학교 산학협력단 | Rgbd 센서를 이용한 3d 모델복원 방법 |
| CN115035235A (zh) * | 2021-03-05 | 2022-09-09 | 华为技术有限公司 | 三维重建方法及装置 |
| WO2023033565A1 (ko) * | 2021-09-03 | 2023-03-09 | 삼성전자 주식회사 | 깊이 센서를 이용하여 깊이 맵을 획득하는 증강 현실 디바이스 및 방법 |
| US12367646B2 (en) | 2021-09-03 | 2025-07-22 | Samsung Electronics Co., Ltd. | Augmented reality device and method for obtaining depth map by using depth sensor |
| KR102393345B1 (ko) * | 2021-12-28 | 2022-05-02 | 주식회사 맥스트 | 3차원 점군 처리 시스템 및 방법 |
| KR20230138686A (ko) * | 2022-03-24 | 2023-10-05 | 주식회사 팀엘리시움 | 척추 정렬 상태를 예측하는 방법 |
| KR102684338B1 (ko) * | 2023-06-07 | 2024-07-12 | 하혜주 | 크로마키합성을 혁신한 인공지능 기반 촬영대행 서비스 제공 시스템 |
| CN120063287A (zh) * | 2025-04-24 | 2025-05-30 | 山东建筑大学 | 一种动态环境自适应的智能导航方法及系统 |
| KR102885253B1 (ko) * | 2025-07-07 | 2025-11-12 | 소울아트 주식회사 | 포인트 클라우드의 캘리브레이션을 통한 객체의 모션 캡쳐용 정보 획득방법, 컴퓨팅 장치 및 컴퓨터 프로그램 |
| CN121465502A (zh) * | 2026-01-07 | 2026-02-06 | 浙江大学 | 一种智能化电子压舌板以及高精度三维口腔成像方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102525030B1 (ko) | 2023-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102525030B1 (ko) | 포인트 클라우드를 생성하는 방법 및 장치 | |
| KR102431117B1 (ko) | 포인트 클라우드 맵핑 | |
| EP2992508B1 (en) | Diminished and mediated reality effects from reconstruction | |
| US10839585B2 (en) | 4D hologram: real-time remote avatar creation and animation control | |
| WO2021088473A1 (en) | Image super-resolution reconstruction method, image super-resolution reconstruction apparatus, and computer-readable storage medium | |
| US9426444B2 (en) | Depth measurement quality enhancement | |
| US10789765B2 (en) | Three-dimensional reconstruction method | |
| JP7143225B2 (ja) | 三次元再構成方法及び三次元再構成装置 | |
| WO2019101061A1 (en) | Three-dimensional (3d) reconstructions of dynamic scenes using reconfigurable hybrid imaging system | |
| CN111480342B (zh) | 编码装置、编码方法、解码装置、解码方法和存储介质 | |
| US20240144595A1 (en) | 3d scene reconstruction with additional scene attributes | |
| US11665330B2 (en) | Dynamic-baseline imaging array with real-time spatial data capture and fusion | |
| KR20070095040A (ko) | 카메라 보정 방법 및 이를 이용한 3차원 물체 재구성 방법 | |
| JP7170230B2 (ja) | 三次元再構成方法及び三次元再構成装置 | |
| US20220245885A1 (en) | Volumetric Imaging | |
| CN114742866A (zh) | 图像配准方法、装置、存储介质及电子设备 | |
| US12159349B2 (en) | Image-tiles-based environment reconstruction | |
| US10438405B2 (en) | Detection of planar surfaces for use in scene modeling of a captured scene | |
| US12183021B2 (en) | High dynamic range viewpoint synthesis | |
| CN117726919A (zh) | 模型训练方法、装置、计算机设备及存储介质 | |
| US10346949B1 (en) | Image registration | |
| EP2800055A1 (en) | Method and system for generating a 3D model | |
| US20240233092A1 (en) | Image processing method and image processing device based on neural network | |
| US12131423B2 (en) | Analysis apparatus, communication system, non-transitory computer readable medium | |
| CN118840496A (zh) | 一种基于过渡影像渲染的空地影像匹配方法、设备及介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |