KR20200071886A - 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법 - Google Patents
딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법 Download PDFInfo
- Publication number
- KR20200071886A KR20200071886A KR1020180156434A KR20180156434A KR20200071886A KR 20200071886 A KR20200071886 A KR 20200071886A KR 1020180156434 A KR1020180156434 A KR 1020180156434A KR 20180156434 A KR20180156434 A KR 20180156434A KR 20200071886 A KR20200071886 A KR 20200071886A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- moving object
- syntax
- deep learning
- motion vector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G06K9/00711—
-
- G06K9/481—
-
- G06K9/6267—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/25—Determination of region of interest [ROI] or a volume of interest [VOI]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/46—Descriptors for shape, contour or point-related descriptors, e.g. scale invariant feature transform [SIFT] or bags of words [BoW]; Salient regional features
- G06V10/469—Contour-based spatial representations, e.g. vector-coding
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Software Systems (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- General Health & Medical Sciences (AREA)
- Evolutionary Computation (AREA)
- Data Mining & Analysis (AREA)
- Computational Linguistics (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Databases & Information Systems (AREA)
- Medical Informatics (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
Description
[도 2]는 종래기술에서 CCTV 영상으로부터 이동객체를 감지해내는 과정을 나타내는 순서도.
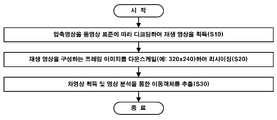
[도 3]은 본 발명에 따라 딥러닝 이미지 분석과 연동하여 신택스 기반의 선별 관제를 제공하는 전체 프로세스를 나타내는 순서도.
[도 4]는 본 발명에서 딥러닝 이미지 분석과 연동하여 신택스 기반의 선별 관제를 제공하는 개념을 나타내는 도면.
[도 5]는 본 발명에서 선별 관제의 개념을 나타내는 도면.
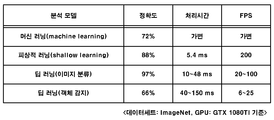
[도 6]은 여러 신경망 분석 모델 별로 정확도와 처리 속도를 비교하여 나타낸 도면.
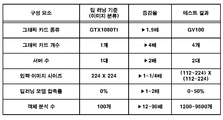
[도 7]은 선별 관제와 딥러닝을 연동시킨 구성의 성능 개선을 보여주는 실험 데이터를 나타낸 도면.
[도 8]은 본 발명에서 압축영상으로부터 유효 움직임 영역을 검출하는 과정의 구현 예를 나타내는 순서도.
[도 9]는 CCTV 영상에 대해 유효 움직임 영역 검출 과정을 적용한 결과의 일 예를 나타낸 도면.
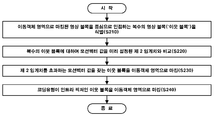
[도 10]은 본 발명에서 이동객체 영역에 대한 바운더리 영역을 검출하는 과정의 구현 예를 나타내는 순서도.
[도 11]은 [도 9]의 CCTV 영상 이미지에 대해 바운더리 영역 검출 과정을 적용한 결과의 일 예를 나타낸 도면.
[도 12]는 [도 11]의 CCTV 영상 이미지에 대해 인터폴레이션을 통해 이동객체 영역을 정리한 결과의 일 예를 나타낸 도면.
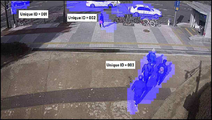
[도 13]은 이동객체 영역에 Unique ID가 할당된 일 예를 나타내는 도면.
Claims (9)
- 압축영상의 비트스트림을 파싱하여 코딩 유닛에 대한 모션벡터 및 코딩유형을 획득하는 제 1 단계;
압축영상을 구성하는 복수의 영상 블록 별로 미리 설정된 시간동안의 모션벡터 누적값을 획득하는 제 2 단계;
상기 복수의 영상 블록에 대하여 상기 모션벡터 누적값을 미리 설정된 제 1 임계치와 비교하는 제 3 단계;
상기 제 1 임계치를 초과하는 모션벡터 누적값을 갖는 영상 블록을 이동객체 영역으로 마킹하는 제 4 단계;
상기 이동객체 영역으로 마킹된 복수의 영상 블록들이 상호 연결된 덩어리를 상기 압축영상의 이동객체 영역으로 설정하는 제 5 단계;
상기 이동객체 영역이 설정된 CCTV 영상공급 채널을 취합하여 선별 관제를 제공하는 제 6 단계;
상기 압축영상을 디코딩하여 상기 이동객체 영역의 이미지를 획득하는 제 7 단계;
상기 이동객체 영역의 이미지에 대해 딥러닝 기반으로 이미지 분류 정보를 획득하는 제 8 단계;
상기 이동객체 영역에 대하여 프레임 이미지 내의 위치 정보와 상기 이미지 분류 정보를 결합하여 객체 감지 정보를 획득하는 제 9 단계;
를 포함하여 구성되는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 청구항 1에 있어서,
상기 제 9 단계 이후에 수행되는,
상기 객체 감지 정보를 미리 설정된 ROI(관심영역)와 대비함으로써 ROI에 대한 객체 감지 서비스를 제공하는 단계;
를 더 포함하여 구성되는 것을 특징으로 하는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 청구항 1에 있어서,
상기 제 7 단계는 상기 압축영상에서 이동객체 영역이 마킹된 영상 프레임을 선별적으로 디코딩하여 상기 이동객체 영역의 이미지를 획득하는 것을 특징으로 하는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 청구항 1에 있어서,
상기 제 1 단계와 상기 제 2 단계 사이에 수행되는,
프레임 이미지의 전역에 대해 지배적인 모션벡터가 균일하게 검출되는 전역 균일 모션벡터 상황을 식별 및 필터링하는 단계;
를 더 포함하여 구성되는 것을 특징으로 하는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 청구항 1에 있어서,
상기 제 4 단계와 상기 제 5 단계 사이에 수행되는,
상기 이동객체 영역을 중심으로 그 인접하는 복수의 영상 블록(이하, '이웃 블록'이라 함)을 식별하는 제 a 단계;
상기 복수의 이웃 블록에 대하여 상기 제 1 단계에서 획득된 모션벡터 값을 미리 설정된 제 2 임계치와 비교하는 제 b 단계;
상기 복수의 이웃 블록 중에서 상기 제 b 단계의 비교 결과 상기 제 2 임계치를 초과하는 모션벡터 값을 갖는 이웃 블록을 이동객체 영역으로 추가 마킹하는 제 c 단계;
를 더 포함하여 구성되는 것을 특징으로 하는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 청구항 1에 있어서,
상기 제 4 단계와 상기 제 5 단계 사이에 수행되는,
상기 이동객체 영역을 중심으로 그 인접하는 복수의 영상 블록(이하, '이웃 블록'이라 함)을 식별하는 제 a 단계;
상기 복수의 이웃 블록에 대하여 상기 모션벡터 누적값을 상기 제 1 임계치보다 작은 값으로 미리 설정된 제 2 임계치와 비교하는 제 b 단계;
상기 복수의 이웃 블록 중에서 상기 제 b 단계의 비교 결과 상기 제 2 임계치를 초과하는 모션벡터 누적값을 갖는 이웃 블록을 이동객체 영역으로 추가 마킹하는 제 c 단계;
를 더 포함하여 구성되는 것을 특징으로 하는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 청구항 5 또는 청구항 6에 있어서,
상기 제 c 단계 이후에 수행되는,
상기 복수의 이웃 블록 중에서 코딩유형이 인트라 픽쳐인 이웃 블록을 이동객체 영역으로 추가 마킹하는 제 d 단계;
를 더 포함하여 구성되는 것을 특징으로 하는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 청구항 7에 있어서,
상기 제 d 단계 이후에 수행되는,
상기 복수의 이동객체 영역에 대하여 인터폴레이션을 수행하여 이동객체 영역으로 둘러싸인 미리 설정된 갯수 이하의 비마킹 영상 블록을 이동객체 영역으로 추가 마킹하는 제 e 단계;
를 더 포함하여 구성되는 것을 특징으로 하는 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법.
- 하드웨어와 결합되어 청구항 1 내지 6 중 어느 하나의 항에 따른 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법을 실행시키기 위하여 매체에 저장된 컴퓨터프로그램.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180156434A KR102187376B1 (ko) | 2018-12-06 | 2018-12-06 | 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180156434A KR102187376B1 (ko) | 2018-12-06 | 2018-12-06 | 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200071886A true KR20200071886A (ko) | 2020-06-22 |
| KR102187376B1 KR102187376B1 (ko) | 2020-12-04 |
Family
ID=71142714
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180156434A Active KR102187376B1 (ko) | 2018-12-06 | 2018-12-06 | 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102187376B1 (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230040285A (ko) * | 2021-09-15 | 2023-03-22 | 주식회사 핀텔 | 영상정보의 비트스트림정보에 기반하여 객체영역을 검출하는 방법 및 시스템 |
| KR20230040265A (ko) * | 2021-09-15 | 2023-03-22 | 주식회사 핀텔 | 교통정보 및 보행정보 분석방법, 장치 및 이에 대한 컴퓨터 프로그램 |
| KR20230111573A (ko) * | 2022-01-18 | 2023-07-25 | 한양대학교 산학협력단 | Hevc 압축영상에서의 효율적인 객체 검출을 위한 비트스트림 특징 이미지 생성 방법 및 시스템 |
| CN116489368A (zh) * | 2023-06-21 | 2023-07-25 | 禹创半导体(深圳)有限公司 | 影像动态压缩方法及影像动态压缩装置 |
| KR20240059841A (ko) | 2022-10-28 | 2024-05-08 | (주)한국플랫폼서비스기술 | 효율적인 동영상 객체 탐지를 위한 트래킹 방법 및 장치 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230149460A (ko) | 2022-04-20 | 2023-10-27 | 한화비전 주식회사 | 감시 장치 및 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20000032095A (ko) * | 1998-11-12 | 2000-06-05 | 정선종 | 압축 영상의 이동객체 분할장치 및 방법 |
| KR20020010847A (ko) * | 2000-07-31 | 2002-02-06 | 오길록 | 압축 비디오의 압축 영역에서의 카메라 움직임 검출 및분할방법 |
| KR101848367B1 (ko) * | 2017-08-14 | 2018-04-12 | 주식회사 네트로 | 모션벡터와 dct 계수를 이용한 메타데이터 기반 의심영상 구분식별 방식의 영상 관제 방법 |
| KR101850286B1 (ko) * | 2017-06-27 | 2018-04-19 | 한국기술교육대학교 산학협력단 | 딥 러닝 기반 cctv용 영상 인식 방법 |
-
2018
- 2018-12-06 KR KR1020180156434A patent/KR102187376B1/ko active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20000032095A (ko) * | 1998-11-12 | 2000-06-05 | 정선종 | 압축 영상의 이동객체 분할장치 및 방법 |
| KR20020010847A (ko) * | 2000-07-31 | 2002-02-06 | 오길록 | 압축 비디오의 압축 영역에서의 카메라 움직임 검출 및분할방법 |
| KR101850286B1 (ko) * | 2017-06-27 | 2018-04-19 | 한국기술교육대학교 산학협력단 | 딥 러닝 기반 cctv용 영상 인식 방법 |
| KR101848367B1 (ko) * | 2017-08-14 | 2018-04-12 | 주식회사 네트로 | 모션벡터와 dct 계수를 이용한 메타데이터 기반 의심영상 구분식별 방식의 영상 관제 방법 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230040285A (ko) * | 2021-09-15 | 2023-03-22 | 주식회사 핀텔 | 영상정보의 비트스트림정보에 기반하여 객체영역을 검출하는 방법 및 시스템 |
| KR20230040265A (ko) * | 2021-09-15 | 2023-03-22 | 주식회사 핀텔 | 교통정보 및 보행정보 분석방법, 장치 및 이에 대한 컴퓨터 프로그램 |
| KR20230111573A (ko) * | 2022-01-18 | 2023-07-25 | 한양대학교 산학협력단 | Hevc 압축영상에서의 효율적인 객체 검출을 위한 비트스트림 특징 이미지 생성 방법 및 시스템 |
| KR20240059841A (ko) | 2022-10-28 | 2024-05-08 | (주)한국플랫폼서비스기술 | 효율적인 동영상 객체 탐지를 위한 트래킹 방법 및 장치 |
| CN116489368A (zh) * | 2023-06-21 | 2023-07-25 | 禹创半导体(深圳)有限公司 | 影像动态压缩方法及影像动态压缩装置 |
| CN116489368B (zh) * | 2023-06-21 | 2023-09-01 | 禹创半导体(深圳)有限公司 | 影像动态压缩方法及影像动态压缩装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102187376B1 (ko) | 2020-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102187376B1 (ko) | 딥러닝 이미지 분석과 연동하는 신택스 기반의 선별 관제 제공 방법 | |
| KR101949676B1 (ko) | 압축영상에 대한 신택스 기반의 객체 침입 감지 방법 | |
| JP6088541B2 (ja) | クラウドベースの映像監視管理システム | |
| EP2838268B1 (en) | Method, device and system for producing a merged digital video sequence | |
| KR102090785B1 (ko) | 압축영상에 대한 신택스 기반의 영상분석 시스템과 연동 처리 방법 | |
| US20120275524A1 (en) | Systems and methods for processing shadows in compressed video images | |
| KR102127276B1 (ko) | 복수의 고해상도 카메라들을 이용한 파노라마 영상 감시 시스템 및 그 방법 | |
| EP4195166B1 (en) | Apparatus and method for transmitting images and apparatus and method for receiving images | |
| KR102179077B1 (ko) | 상용분류기 외부 연동 학습형 신경망을 이용한 압축영상에 대한 신택스 기반의 객체 분류 방법 | |
| CN112532982A (zh) | 使用跳过块掩码来减小来自监控摄像机的比特率 | |
| KR102061915B1 (ko) | 압축영상에 대한 신택스 기반의 객체 분류 방법 | |
| KR102090775B1 (ko) | 압축영상에 대한 신택스 기반의 이동객체 영역 추출 방법 | |
| KR20200013335A (ko) | 압축영상에 대한 신택스 기반의 ptz 카메라의 객체 추적 제어 방법 | |
| KR20200100489A (ko) | 모션벡터의 궤적 및 패턴을 이용한 압축영상의 이상모션 객체 식별 방법 | |
| KR102042397B1 (ko) | 압축영상에 대한 신택스 기반의 히트맵 생성 방법 | |
| KR102015082B1 (ko) | 압축영상에 대한 신택스 기반의 객체 추적 방법 | |
| KR102015084B1 (ko) | 압축영상에 대한 신택스 기반의 도로 역주행 감지 방법 | |
| CN113706573B (zh) | 一种运动物体的检测方法、装置及存储介质 | |
| KR102153093B1 (ko) | 컨텍스트를 고려한 압축영상에 대한 신택스 기반의 이동객체 영역 추출 방법 | |
| KR102090782B1 (ko) | 압축영상에 대한 신택스 기반의 객체 월담 감지 방법 | |
| KR102123678B1 (ko) | 모션벡터 블록체인 기반의 압축영상 위변조 식별 방법 | |
| KR102585167B1 (ko) | 압축영상에 대한 신택스 기반의 동일인 분석 방법 | |
| KR102343029B1 (ko) | 모션벡터 기반 분기처리를 이용한 압축영상의 영상분석 처리 방법 | |
| KR20200068102A (ko) | 압축영상에 대한 신택스 기반의 mrpn-cnn을 이용한 객체 분류 방법 | |
| KR102264252B1 (ko) | 압축 영상에서의 이동객체 검출방법 및 이를 수행하는 영상 감시 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P14-X000 | Amendment of ip right document requested |
St.27 status event code: A-5-5-P10-P14-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |