KR20200073144A - 수동 위치 레인징에서의 페이즈 변이 기반 도래 시간(toa) 보고에 대한 시스템 및 방법 - Google Patents
수동 위치 레인징에서의 페이즈 변이 기반 도래 시간(toa) 보고에 대한 시스템 및 방법 Download PDFInfo
- Publication number
- KR20200073144A KR20200073144A KR1020190164437A KR20190164437A KR20200073144A KR 20200073144 A KR20200073144 A KR 20200073144A KR 1020190164437 A KR1020190164437 A KR 1020190164437A KR 20190164437 A KR20190164437 A KR 20190164437A KR 20200073144 A KR20200073144 A KR 20200073144A
- Authority
- KR
- South Korea
- Prior art keywords
- toa
- rsta
- ista
- psta
- sta
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/02—Systems for determining distance or velocity not using reflection or reradiation using radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/06—Position of source determined by co-ordinating a plurality of position lines defined by path-difference measurements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L43/00—Arrangements for monitoring or testing data switching networks
- H04L43/10—Active monitoring, e.g. heartbeat, ping or trace-route
- H04L43/106—Active monitoring, e.g. heartbeat, ping or trace-route using time related information in packets, e.g. by adding timestamps
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/0009—Transmission of position information to remote stations
- G01S5/0081—Transmission between base stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/021—Calibration, monitoring or correction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0221—Receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0226—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0236—Assistance data, e.g. base station almanac
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/10—Position of receiver fixed by co-ordinating a plurality of position lines defined by path-difference measurements, e.g. omega or decca systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0682—Clock or time synchronisation in a network by delay compensation, e.g. by compensation of propagation delay or variations thereof, by ranging
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L43/00—Arrangements for monitoring or testing data switching networks
- H04L43/08—Monitoring or testing based on specific metrics, e.g. QoS, energy consumption or environmental parameters
- H04L43/0852—Delays
- H04L43/0864—Round trip delays
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S11/00—Systems for determining distance or velocity not using reflection or reradiation
- G01S11/02—Systems for determining distance or velocity not using reflection or reradiation using radio waves
- G01S11/08—Systems for determining distance or velocity not using reflection or reradiation using radio waves using synchronised clocks
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- General Health & Medical Sciences (AREA)
- Cardiology (AREA)
- Environmental & Geological Engineering (AREA)
- Health & Medical Sciences (AREA)
- Mobile Radio Communication Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
도 1은 몇몇 실시예에 따른 무선 네트워크 환경을 도시한다.
도 2는 몇몇 실시예에 따른 TB 레인징 프로토콜의 프레임을 도시한다
도 3은 몇몇 실시예에 따른 무선 네트워크 환경의 도면이다.
도 4는 몇몇 실시예에 따른 무선 네트워크 환경에서 전파 경로 및 타임 스탬프의 다이어그램을 도시한다.
도 5는 몇몇 실시예에 따른 TOA 위치 추정을 2차원으로 계산하기 위한 무선 네트워크 환경의 도면이다.
도 6은 몇몇 실시예에 따른 무선 네트워크 환경의 도면이다.
도 7은 몇몇 실시예에 따라 ISTA가 PS-TOA를 보고하는 무선 네트워크 환경의 도면이다.
도 8a, 8b 및 8c는 몇몇 실시예에 따라, ISTA (704)가 PS-TOA를 보고하는 TB 레인징 프로토콜의 프레임을 도시한다.
도 9는 몇몇 실시예에 따른 무선 네트워크 환경의 도면이다.
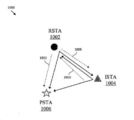
도 10은 몇몇 실시예에 따른 RSTA가 PS-TOA를 보고하는 무선 네트워크 환경의 도면이다.
도 11a, 11b 및 11c는 몇몇 실시예에 따라, RSTA가 PS-TOA를 보고하는 TB 레인징 프로토콜의 프레임을 도시한다.
도 12는 몇몇 실시예에 따른 RSTA 및 ISTA가 PS-TOA를 보고하는 무선 네트워크 환경의 도면이다.
도 13은 몇몇 실시예에 따라, RSTA가 PS-TOA를 보고하는 TB 레인징 프로토콜의 프레임을 도시한다.
도 14는 몇몇 실시예에 따라 무선 네트워크 시스템에서 수동 위치 방법에 대한 순서도 (1400)이다.
도 15는 몇몇 실시예에 따른 무선 네트워크 시스템에서의 수동 위치 방법에 대한 순서도 (1500)이다.
도 16은 몇몇 실시예에 따른 네트워크 환경 (1600)에서의 전자 장치 (1601)의 블록도이다.












Claims (20)
- 응답기 스테이션(responder station)(RSTA)을 사용하여, 제1 페이즈 변이 도래 시간(phase shift time of arrival)(PS-TOA)을 측정하고,
이니시에이터 스테이션(initiator station)(ISTA)을 사용하여, 제2 PS-TOA를 측정하고,
상기 RSTA를 사용하여, 상기 제1 PS-TOA를 보고하고,
상기 ISTA를 사용하여, 상기 제2 PS-TOA를 보고하고,
상기 RSTA를 사용하여, 타임 스탬프를 브로드캐스트(broadcasting) 하고,
수동 스테이션(passive station)(PSTA)를 사용하여, 보고된 상기 제1 PS-TOA, 보고된 상기 제2 PS-TOA, 및 브로드캐스트된 상기 타임 스탬프에 기초하여, 상기 RSTA 및 상기 ISTA 한 쌍과 상기 PSTA 사이의 차동 거리(differential distance)를 결정하는 것을 포함하는 방법. - 제1항에 있어서,
상기 RSTA는 수신된 업링크(uplink)(UL) 널 데이터 패킷(null data packet)(NDP)에 기초하여 상기 제1 PS-TOA를 측정하는 방법. - 제1항에 있어서,
상기 ISTA는 수신된 다운링크(downlink)(DL) 널 데이터 패킷(NDP)에 기초하여 상기 제2 PS-TOA를 측정하는 방법. - 제1항에 있어서,
상기 RSTA는, 상기 RSTA에 의해 측정된 상기 제1 PS-TOA를, 상기 RSTA의 위치 측정 보고(location measurement report)(LMR) 프레임에 보고하는 방법. - 제4항에 있어서,
상기 RSTA는, 상기 RSTA에 의해 측정된 도래 시간(time of arrival)(TOA)을, 상기 RSTA의 상기 위치 측정 보고(LMR) 프레임에 보고하는 방법. - 제1항에 있어서,
상기 차동 거리는, 차동 비행 시간(time-of-flight)(ToF)을 포함하는 방법. - 응답기 스테이션(RSTA);
이니시에이터 스테이션(ISTA)으로서, 상기 RSTA와 상기 ISTA는 한 쌍인 ISTA;
수동 스테이션(PSTA);
메모리; 및
프로세서를 포함하는 시스템으로서,
상기 프로세서는,
상기 RSTA를 사용하여, 제1 PS-TOA를 측정하고,
상기 ISTA를 사용하여, 제2 PS-TOA를 측정하고,
상기 RSTA를 사용하여, 상기 제1 PS-TOA를 보고하고,
상기 ISTA를 사용하여, 상기 제2 PS-TOA를 보고하고,
상기 RSTA를 사용하여, 타임 스탬프를 브로드캐스트하고,
수동 스테이션(PSTA)를 사용하여, 보고된 상기 제1 PS-TOA, 보고된 상기 제2 PS-TOA, 및 브로드캐스트된 상기 타임 스탬프에 기초하여, 상기 RSTA 및 상기 ISTA 한 쌍과 상기 PSTA 사이의 차동 거리(differential distance)를 결정하는 시스템. - 제7항에 있어서,
상기 프로세서는, 수신된 업링크(uplink)(UL) 널 데이터 패킷(null data packet)(NDP)에 기초하여 상기 제1 PS-TOA를 측정하는 시스템. - 제7항에 있어서,
상기 프로세서는, 수신된 다운링크(downlink)(DL) 널 데이터 패킷(NDP)에 기초하여 상기 제2 PS-TOA를 측정하는 시스템. - 제7항에 있어서,
상기 RSTA는, 상기 RSTA에 의해 측정된 상기 제1 PS-TOA를, 상기 RSTA의 위치 측정 보고(location measurement report)(LMR) 프레임에 보고하는 시스템. - 제10항에 있어서,
상기 RSTA는, 상기 RSTA에 의해 측정된 도래 시간(time of arrival)(TOA)을, 상기 RSTA의 LMR 프레임에 보고하는 시스템. - 제7항에 있어서,
상기 차동 거리는, 차동 비행 시간(time-of-flight)(ToF)을 포함하는 시스템. - 제1 스테이션 (STA)을 사용하여, 페이즈 변이 도래 시간 (PS-TOA)을 수신하고,
상기 제1 STA를 사용하여, 수신된 상기 PS-TOA의 보상된 데이터를 계산하고, 상기 보상된 데이터는 보상된 PS-TOA 및 상기 PS-TOA에 대한 보상 중 하나 이상을 포함하고,
상기 제1 STA를 사용하여, 상기 보상된 데이터를 전송하되, 상기 보상된 전송하는 것은, 상기 제1 STA를 사용하여, 상기 보상된 데이터를 제2 STA로 보고하는 것과 상기 보상된 데이터를 브로드캐스트하는 것 중 적어도 하나 이상을 수행하는 것을 더 포함하고,
상기 보상된 데이터에 기초하여, 수동 스테이션 (PSTA)으로부터 상기 제1 STA 및 상기 제2 STA까지의 차동 거리를 결정하는 것을 포함하는 방법. - 제13항에 있어서,
ISTA 및 RSTA 사이의 상기 차동 거리를 결정하는 것을 더 포함하는 방법. - 제14항에 있어서,
상기 차동 거리는 상기 ISTA의 PS-TOA에 기초하여 결정되는 방법. - 제14항에 있어서,
상기 차동 거리는 상기 RSTA의 PS-TOA에 기초하여 결정되는 방법. - 메모리, 프로세서, 제1 스테이션 (STA), 및 수동 스테이션 (PSTA)을 포함하는 시스템으로서,
상기 제1 STA는,
페이즈 변이 도래 시간 (PS-TOA)을 수신하고,
수신된 상기 PS-TOA의 보상된 데이터를 계산하며, 상기 보상된 데이터는 보상된 PS-TOA 및 상기 PS-TOA에 대한 보상 중 하나 이상을 포함하고,
상기 보상된 데이터를 전송하고, 상기 보상된 전송하는 것은 상기 보상된 데이터를 제2 STA로 보고하는 것과 상기 보상된 데이터를 브로드캐스트하는 것 중 적어도 하나 이상을 수행하는 것을 더 포함하고,
상기 PSTA는, 상기 보상된 데이터에 기초하여, PSTA로부터 상기 제1 STA 및 상기 제2 STA까지의 차동 거리를 결정하는 시스템. - 제17항에 있어서,
상기 프로세서는 ISTA 및 RSTA 간의 상기 차동 거리를 더 결정하는 시스템. - 제18항에 있어서,
상기 차동 거리는 상기 ISTA의 PS-TOA에 기초하여 결정되는 시스템. - 제18항에 있어서,
상기 차동 거리는 상기 RSTA의 PS-TOA에 기초하여 결정되는 시스템.
Applications Claiming Priority (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862778806P | 2018-12-12 | 2018-12-12 | |
| US62/778,806 | 2018-12-12 | ||
| US201962805768P | 2019-02-14 | 2019-02-14 | |
| US62/805,768 | 2019-02-14 | ||
| US201962895788P | 2019-09-04 | 2019-09-04 | |
| US62/895,788 | 2019-09-04 | ||
| US201962905994P | 2019-09-25 | 2019-09-25 | |
| US62/905,994 | 2019-09-25 | ||
| US16/698,028 | 2019-11-27 | ||
| US16/698,028 US11496384B2 (en) | 2018-12-12 | 2019-11-27 | System and method for phase shift based time of arrival (TOA) reporting in passive location ranging |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200073144A true KR20200073144A (ko) | 2020-06-23 |
| KR102809427B1 KR102809427B1 (ko) | 2025-05-16 |
Family
ID=68886937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190164437A Active KR102809427B1 (ko) | 2018-12-12 | 2019-12-11 | 수동 위치 레인징에서의 페이즈 변이 기반 도래 시간(toa) 보고에 대한 시스템 및 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11496384B2 (ko) |
| EP (1) | EP3677927A3 (ko) |
| KR (1) | KR102809427B1 (ko) |
| CN (1) | CN111308452B (ko) |
| TW (1) | TWI848028B (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023090606A1 (ko) * | 2021-11-22 | 2023-05-25 | 삼성전자 주식회사 | 위치 측정을 위한 전자 장치 및 그 동작 방법 |
| US12464489B2 (en) | 2021-11-22 | 2025-11-04 | Samsung Electronics Co., Ltd. | Electronic device for localization and method of operating the same |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105929365B (zh) * | 2016-04-27 | 2018-07-24 | 成都精位科技有限公司 | 一种uwb高精度定位系统及定位方法 |
| US20200355785A1 (en) * | 2019-07-31 | 2020-11-12 | Intel Corporation | Phase shift time of arrival |
| US11005582B1 (en) * | 2020-01-15 | 2021-05-11 | Kiomars Anvari | Use of 5G IoT network to control moving objects in a smart environment |
| US11689892B2 (en) * | 2020-09-04 | 2023-06-27 | Qualcomm Incorporated | Approach to use positioning reference signal(s) (PRS(s)) traveling non line-of-sight (NLOS) transmission paths and map information for positioning of user equipments (UEs) |
| US11743858B2 (en) * | 2020-09-21 | 2023-08-29 | Samsung Electronics Co., Ltd. | System and method of optimizing wireless device ranging |
| EP4232839A4 (en) * | 2020-10-26 | 2024-06-26 | Zainar, Inc. | HYBRID TELEMETRY METHOD BASED ON ARRIVAL TIME |
| US12554001B2 (en) * | 2020-10-26 | 2026-02-17 | ZaiNar, Inc. | Hybrid method for time-of-arrival-based ranging |
| US12092717B2 (en) * | 2020-12-15 | 2024-09-17 | Samsung Electronics Co., Ltd. | Feedback secured wireless ranging |
| US11337133B1 (en) * | 2021-02-08 | 2022-05-17 | InContact Inc. | Systems and methods for optimal channel selection |
| KR20230165760A (ko) | 2021-04-01 | 2023-12-05 | 퀄컴 인코포레이티드 | CLI(cross-link interference) 자원 측정을 이용한 TDOA(time difference of arrival)-기반 UE(user equipment) 포지셔닝 |
| US20220402521A1 (en) * | 2021-06-16 | 2022-12-22 | Waymo Llc | Autonomous path generation with path optimization |
| US12594959B1 (en) | 2021-06-16 | 2026-04-07 | Waymo Llc | Scene generation using probabilistic programming languages |
| EP4489338A4 (en) * | 2022-03-04 | 2025-04-23 | Beijing Xiaomi Mobile Software Co., Ltd. | Communication method and apparatus, electronic device, and storage medium |
| CN116866819A (zh) * | 2022-03-28 | 2023-10-10 | 华为技术有限公司 | 测量方法及测量装置 |
| US12598575B2 (en) * | 2023-03-09 | 2026-04-07 | Qualcomm Incorporated | Ranging polls |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6453168B1 (en) * | 1999-08-02 | 2002-09-17 | Itt Manufacturing Enterprises, Inc | Method and apparatus for determining the position of a mobile communication device using low accuracy clocks |
| US6775242B2 (en) * | 2001-07-09 | 2004-08-10 | Qualcomm Incorporated | Method and apparatus for time-aligning transmissions from multiple base stations in a CDMA communication system |
| US8018383B1 (en) | 2010-06-08 | 2011-09-13 | Q-Track Corporation | Method and apparatus for determining location using signals-of-opportunity |
| US7899006B2 (en) | 2006-12-05 | 2011-03-01 | Zebra Enterprise Solutions Corp. | Location system for wireless local area network (WLAN) using RSSI and time difference of arrival (TDOA) processing |
| US9037155B2 (en) * | 2008-10-28 | 2015-05-19 | Sven Fischer | Time of arrival (TOA) estimation for positioning in a wireless communication network |
| US8063825B1 (en) * | 2009-05-07 | 2011-11-22 | Chun Yang | Cooperative position location via wireless data link using broadcast digital transmissions |
| US9538493B2 (en) | 2010-08-23 | 2017-01-03 | Finetrak, Llc | Locating a mobile station and applications therefor |
| US8687560B2 (en) | 2011-11-01 | 2014-04-01 | Diani Systems, Inc. | Unsynchronized time-of-flight-based wireless positioning system using network broadcasts |
| EP3071987A1 (en) | 2013-11-21 | 2016-09-28 | Tracewave GmbH | Css localization system |
| US9907044B2 (en) * | 2014-09-15 | 2018-02-27 | Qualcomm Incorporated | IEEE 802.11 enhancements for high efficiency positioning |
| US9867004B2 (en) * | 2015-12-23 | 2018-01-09 | Qualcomm Incorporated | Broadcast time-of-departure (TOD) frame format |
| US10158443B1 (en) | 2016-09-02 | 2018-12-18 | Marvell International Ltd. | Methods and apparatus for fine timing measurement with frequency domain processing |
| US11997563B2 (en) * | 2016-11-23 | 2024-05-28 | Qualcomm Incorporated | Enhancements to observed time difference of arrival positioning of a mobile device |
| CN109891958B (zh) * | 2016-11-28 | 2021-10-29 | 英特尔公司 | 用于测距测量的装置、系统和方法 |
| WO2018195174A1 (en) * | 2017-04-19 | 2018-10-25 | Feng Jiang | Measurement report for a measurement protocol |
| US11125848B2 (en) | 2017-07-28 | 2021-09-21 | Silicon Laboratories Inc. | Systems and methods for multiantenna orientation and direction detection |
| US11366219B2 (en) * | 2018-01-30 | 2022-06-21 | Intel Corporation | Passive location measurement |
-
2019
- 2019-11-27 US US16/698,028 patent/US11496384B2/en active Active
- 2019-12-11 KR KR1020190164437A patent/KR102809427B1/ko active Active
- 2019-12-11 EP EP19215391.4A patent/EP3677927A3/en active Pending
- 2019-12-11 TW TW108145339A patent/TWI848028B/zh active
- 2019-12-12 CN CN201911272400.7A patent/CN111308452B/zh active Active
Non-Patent Citations (2)
| Title |
|---|
| Erik Lindskog et al., Passive Location, Qualcomm, 2017.03.14.* * |
| Qi Liu et al., Research and Development of Indoor Positioning, IEEE, 2016.01., pp.67-79* * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023090606A1 (ko) * | 2021-11-22 | 2023-05-25 | 삼성전자 주식회사 | 위치 측정을 위한 전자 장치 및 그 동작 방법 |
| US12464489B2 (en) | 2021-11-22 | 2025-11-04 | Samsung Electronics Co., Ltd. | Electronic device for localization and method of operating the same |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102809427B1 (ko) | 2025-05-16 |
| CN111308452B (zh) | 2025-05-23 |
| CN111308452A (zh) | 2020-06-19 |
| TWI848028B (zh) | 2024-07-11 |
| EP3677927A2 (en) | 2020-07-08 |
| US11496384B2 (en) | 2022-11-08 |
| TW202040158A (zh) | 2020-11-01 |
| EP3677927A3 (en) | 2020-12-02 |
| US20200191979A1 (en) | 2020-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102809427B1 (ko) | 수동 위치 레인징에서의 페이즈 변이 기반 도래 시간(toa) 보고에 대한 시스템 및 방법 | |
| US10708743B2 (en) | Service sharing device and method | |
| US12289702B2 (en) | Method for calculating location and electronic device therefor | |
| CN112291703A (zh) | 建立用于交换测距信息的通信的系统和方法 | |
| US11656319B2 (en) | Method for adjusting length of Golay sequence for object recognition and electronic device therefor | |
| US20220256648A1 (en) | Apparatus and method for performing data communication in nan protocol-based network environment | |
| US12356368B2 (en) | Method and apparatus for performing communication | |
| US11297464B2 (en) | Method for jiggling compensation during object recognition and electronic device thereof | |
| US12019139B2 (en) | Electronic device and method using UWB signal | |
| US12212978B2 (en) | Electronic device and beamforming control method for electronic device | |
| US11251887B2 (en) | Signal strength band-based device management method and electronic device therefor | |
| US11733366B2 (en) | Method of improving distance measurement accuracy and electronic device for same | |
| US12464489B2 (en) | Electronic device for localization and method of operating the same | |
| EP3971601B1 (en) | System and method of optimizing wireless device ranging | |
| US20240230884A1 (en) | Positioning method using wireless communication, and electronic device for supporting same | |
| EP4428563A1 (en) | Electronic device and position measurement method using same | |
| US20260082199A1 (en) | Method and apparatus for controlling non-uwb device by using uwb in wireless communication system | |
| US20260101309A1 (en) | Method and device for predicting location using ultra-wideband communication signal |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20191211 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20221114 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20191211 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20250218 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20250512 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20250514 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20250514 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |