KR20200073232A - 로봇 시스템에 대한 하드웨어 모듈 및 기계적 커플링 - Google Patents
로봇 시스템에 대한 하드웨어 모듈 및 기계적 커플링 Download PDFInfo
- Publication number
- KR20200073232A KR20200073232A KR1020207012087A KR20207012087A KR20200073232A KR 20200073232 A KR20200073232 A KR 20200073232A KR 1020207012087 A KR1020207012087 A KR 1020207012087A KR 20207012087 A KR20207012087 A KR 20207012087A KR 20200073232 A KR20200073232 A KR 20200073232A
- Authority
- KR
- South Korea
- Prior art keywords
- interface
- hardware module
- couplings
- joint
- positioning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/08—Program-controlled manipulators characterised by modular constructions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0004—Braking devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Program-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1602—Program controls characterised by the control system, structure, architecture
- B25J9/161—Hardware, e.g. neural networks, fuzzy logic, interfaces, processor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1615—Program controls characterised by special kind of manipulator, e.g. planar, scara, gantry, cantilever, space, closed chain, passive/active joints and tendon driven manipulators
- B25J9/1617—Cellular, reconfigurable manipulator, e.g. cebot
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40296—Second arm can be attached to first arm, modular
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40304—Modular structure
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Automation & Control Theory (AREA)
- Fuzzy Systems (AREA)
- Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
- Portable Nailing Machines And Staplers (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
Abstract
상기 임베디드 제어기(35)는 수집된 데이터를 수집하도록 구성되며, 상기 수집된 데이터는
· 상기 하드웨어 모듈(3)의 현재 상태를 나타내는 상태 데이터; 및
· 상기 하드웨어 모듈(3)의 사용량을 나타내는 작동 데이터;를 포함하되
상기 수집된 데이터의 적어도 부분은 상기 적어도 하나의 센서(38)로부터의 센서 데이터로부터 결정되고,
상기 임베디드 제어기(35)는
· 상기 수집된 데이터는 상기 데이터 저장 유닛(36) 상에 저장하는 것 그리고
상기 수집된 데이터를 상기 통신 유닛(37)을 통해 송신하는 것 중 적어도 하나를 수행하도록 구성된다.
Description
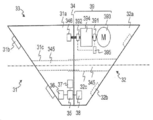
도 1은 로봇 시스템의 요소들이다;
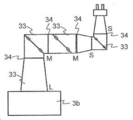
도 2는 매니퓰레이터 모듈이다;
도 3은 조인트 위치가 상이한 매니퓰레이터 모듈이다;
도 4a는 조인트 위치들이 상이한 다른 매니퓰레이터 모듈이다;
도 4b는 회전식 및 선형 조인트가 조합된 매니퓰레이터 모듈이다;
도 5는 로봇 시스템 또는 어셈블리의 물리적 구조이다;
도 6은 로봇 시스템 또는 어셈블리의 인터페이스 구조이다;
도 7a 및 도 7b는 대응하는 인터페이스들이다;
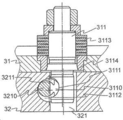
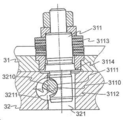
도 8a 내지 도 8c는 인터페이스의 잠금 커플링들이다; 그리고
도 9a 및 도 9b는 하드웨어 모듈을 통해 가이딩되는 도관이다.
도면들에서 동일한 부분들에는 대체로 동일한 참조 부호들이 제공된다.
Claims (15)
- 로봇 시스템에 대한 하드웨어 모듈(3)로서, 상기 하드웨어 모듈(3)은 상기 하드웨어 모듈(3)의 내부 속성을 측정하기 위한 적어도 하나의 센서(38), 다른 하드웨어 모듈들(3)과 통신하기 위한 통신 유닛(37), 데이터 저장 유닛(36) 및 임베디드 제어기(35)를 포함하고,
상기 임베디드 제어기(35)는 수집된 데이터를 수집하도록 구성되며, 상기 수집된 데이터는
· 상기 하드웨어 모듈(3)의 현재 상태를 나타내는 상태 데이터; 및
· 상기 하드웨어 모듈(3)의 사용량을 나타내는 작동 데이터;를 포함하되
상기 수집된 데이터의 적어도 부분은 상기 적어도 하나의 센서(38)로부터의 센서 데이터로부터 결정되고,
상기 임베디드 제어기(35)는
· 상기 수집된 데이터는 상기 데이터 저장 유닛(36) 상에 저장하는 것 그리고
· 상기 수집된 데이터를 상기 통신 유닛(37)을 통해 송신하는 것 중 적어도 하나를 수행하도록 구성되는, 하드웨어 모듈(3). - 청구항 1에 있어서, 조인트(34)에 의해 연결되는 두 개의 기계적 링크(31a, 32a), 상기 조인트(34)의 위치 그리고 그에 의해 상기 링크들(31a, 32a)의 상대 위치를 셋팅하기 위한 액추에이터(39)를 포함하는 매니퓰레이터 모듈(33)인, 하드웨어 모듈(3).
- 청구항 2에 있어서, 상기 하드웨어 모듈(3)은 회전식 조인트(34)에 의해 연결되는 두 개의 기계적 링크를 포함하는 매니퓰레이터 모듈(33)이며, 각 링크는 그것을 다른 하드웨어 모듈(3)의 인터페이스에 연결하도록 조정되는 인터페이스(31, 32)를 포함하고, 상기 조인트(34)는 두 개의 인터페이스가 서로 평행한 제1 위치에 있고, 상기 조인트(34)는 상기 제1 위치에 관해 180° 회전되어 상기 두 개의 인터페이스가 서로 직각으로 있는 제2 위치에 있는, 하드웨어 모듈(3).
- 청구항 1 내지 3 중 어느 한 항에 있어서, 제1 인터페이스(31) 및 제2 인터페이스(32)를 포함하고, 상기 제1 인터페이스(31)로부터 상기 제2 인터페이스(32)로 상기 하드웨어 모듈(3)의 내부를 관통하는 채널(345)을 포함하는, 하드웨어 모듈(3).
- 청구항 2 내지 4 중 어느 한 항에 있어서, 상기 데이터 저장 유닛(36)은 상기 조인트(34) 및 상기 두 개의 링크(31a, 32a)의 상대 위치들 및 배향들을 나타내는 캘리브레이션 데이터를 저장하는, 하드웨어 모듈(3).
- 청구항 2 내지 5 중 어느 한 항에 있어서, 상기 액추에이터(39)는 트랜스미션(394)을 통해 상기 조인트의 상기 위치를 구동하는 모터(393), 및 상기 트랜스미션(394)의 입력 측에서 액추에이터 위치를 측정하기 위한 제1 위치 센서(391) 및 상기 트랜스미션(394)의 출력 측에서 액추에이터 위치를 측정하기 위한 제2 위치 센서(392) 및 상기 트랜스미션(394)의 상기 입력 측 및 상기 출력 측에 상기 액추에이터 위치들로부터 상기 조인트 상에 작용하는 하중을 추정하도록 배열된 하중 추정기(395)를 포함하는, 하드웨어 모듈(3).
- 청구항 2 내지 6 중 어느 한 항에 있어서, 상기 조인트(34)의 이동을 저해하도록 배열된 브레이크(396)를 포함하며, 상기 브레이크(396)는 마찰 브레이크인, 하드웨어 모듈(3).
- 청구항 2 내지 6 중 어느 한 항에 있어서, 상기 조인트(34)의 이동을 저해하도록 배열된 브레이크(396)를 포함하며, 상기 브레이크(396)는 특히 미리 결정된 양의 반발을 허용하며, 상기 조인트(34)의 이동을 저해하는 기계적 형태 맞춤을 확립하도록 배열되어, 하드웨어 모듈(3).
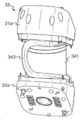
- 바람직하게는 청구항 3 내지 8 중 어느 한 항에 따른 로봇 시스템에 대한 하드웨어 모듈(3)로서, 상기 하드웨어 모듈(3)은 회전식 조인트(34) 및 가요성 도관(343)에 의해 연결되는 두 개의 기계적 링크, 및
내측 원통형 벽(341)과 외측 원통형 벽(342) 사이에 중공 공간(344)에 의해 획정되는 원통형 도관 가이딩 공간으로서, 두 개의 상기 원통형 벽(341, (42)은 상기 중공 공간(344)의 제1 단부로부터 제2 단부로 연장되고 서로 그리고 상기 조인트(340)의 축과 동축인, 상기 원통형 도관 가이딩 공간을 포함하고,
상기 도관(343)은 제1 단부가 상기 제1 링크(31a)에 부착되고 상기 중공 공간(344)의 상기 제1 단부가 그곳으로부터 상기 중공 공간(344)으로 가이딩되고,
상기 도관(343)은 제2 단부가 상기 제2 링크(32a)에 부착되고 상기 중공 공간(344)의 상기 제2 단부가 그곳으로부터 상기 중공 공간(344)으로 가이딩되며,
상기 제1 단부와 상기 제2 단부 사이 상기 도관(343)의 길이는 상기 제1 링크(31a)와 상기 제2 링크(32a) 사이 최소 180° 또는 최소 270° 또는 최소 360°의 상대 회전을 허용하는, 하드웨어 모듈(3). - 청구항 9에 있어서, 상기 내측 원통형 벽(341)은 상기 조인트의 추가 요소들, 특히 상기 액추에이터(39), 임베디드 제어기(35), 데이터 저장 유닛(36) 및 통신 유닛(37) 중 적어도 하나를 둘러싸는, 하드웨어 모듈(3).
- 바람직하게는 청구항 1 내지 10 중 어느 한 항의 하드웨어 모듈들(3)을 커플링하기 위한 기계적 커플링으로서, 상기 기계적 커플링은 제1 인터페이스 평면(310)을 갖는 제1 인터페이스(31) 및 제2 인터페이스 평면(320)을 갖는 제2 인터페이스(32)를 포함하고,
상기 제1 인터페이스(31) 및 제2 인터페이스(32)는 상기 제1 인터페이스 평면(310)이 상기 제2 인터페이스 평면(320)에 맞닿아 배치됨으로서 커플링되도록 설계되며,
상기 기계적 커플링은 하나 이상의 스프링 장진형 잠금 커플링(311, 321) 및 하나 이상의 위치 결정 커플링(312, 322)을 포함하되,
상기 커플링이 확립될 때, 상기 잠금 커플링들(311, 321)은 상기 제1 인터페이스 평면 및 상기 제2 인터페이스 평면(310, 320)을 서로에 대해 잡아 당기고, 상기 제1 인터페이스 평면 및 상기 제2 인터페이스 평면(310, 320)에 평행하게 작용하는 힘으로, 상기 위치 결정 커플링들(312, 322)의 접촉면들을 서로에 대고 밀어 붙이는, 기계적 커플링. - 청구항 11에 있어서, 적어도 두 개의 잠금 커플링(311, 321), 및 적어도 두 개의 위치 결정 커플링(312, 322)을 포함하며, 상기 적어도 두 개의 잠금 커플링은 상기 제1 인터페이스(31)와 상기 제2 인터페이스(32) 사이에 토크를 가하도록 배열되고, 상기 적어도 두 개의 위치 결정 커플링(312, 322)은 적어도 하나의 또는 각각의 위치 결정 커플링(312, 322)에 대해, 각각의 접촉면들이 상기 토크에 의해 서로에 대해 가압됨으로써 상기 제1 인터페이스(31) 및 상기 제2 인터페이스(32)의 상기 상대 위치 및 배향을 획정하는, 기계적 커플링.
- 청구항 11에 있어서, 네 개의 잠금 커플링(311, 321), 및 두 개의 위치 결정 커플링(312, 322)을 포함하며, 상기 네 개의 잠금 커플링은 상기 제1 인터페이스(31)와 상기 제2 인터페이스(32) 사이에 토크를 가하도록 배열되고, 상기 적어도 두 개의 위치 결정 커플링(312, 322)은 각각의 위치 결정 커플링(312, 322)에 대해, 각각의 접촉면들이 상기 토크에 의해 서로에 대해 가압됨으로써 상기 제1 인터페이스(31) 및 상기 제2 인터페이스(32)의 상기 상대 위치 및 배향을 획정하는, 기계적 커플링.
- 청구항 12 또는 13에 있어서, 상기 적어도 두 개의 잠금 커플링(311, 321)에 의해 가해지고 상기 제1 인터페이스 평면 및 상기 제2 인터페이스 평면(310, 320)에 평행하게 작용하는 힘은 상기 위치 결정 커플링들(312, 322)의 상기 접촉면들이 서로에 대해 밀어 붙여지는 경우 작용하는 힘에 의해 균형이 잡히고, 다음 중 적어도 하나:
· 상기 위치 결정 커플링들(312, 322)의 하나 이상 또는 전부에서, 상기 위치 결정 커플링(312, 322)의 상기 접촉면들 사이에 작용하는 힘이 상기 접촉면들에 적어도 대략 수직이고;
· 상기 잠금 커플링들(311, 321)이 상기 잠금 커플링들의 중심점을 획정하고, 상기 위치 결정 커플링들(312, 322)의 각각의 상기 잠금 커플링들의 상기 중심점까지의 거리가 동일하며;
· 상기 잠금 커플링들(311, 321) 및 위치 결정 커플링들(312, 322)의 구성이 적어도 두 상이한 상대 공간 위치에서 상기 인터페이스들(31, 32)을 커플링시킬 수 있게 유지되며, 상기 두 상이한 위치는 상기 인터페이스들 중 하나의 인터페이스의 상기 제1 인터페이스 평면 및 상기 제2 인터페이스 평면(310, 320)에 수직한 축을 중심으로 하여 다른 인터페이스에 관해 180° 및/또는 90°만큼 회전에 의해 관련되는, 기계적 커플링. - 청구항 11 내지 14 중 어느 한 항에 있어서, 상기 제1 인터페이스(31)는 커넥터 플러그(313)를 포함하고, 상기 제2 인터페이스(32)는 적어도 제1 커넥터 잼 및 2 커넥터 잭(323)을 포함하고, 상기 제1 인터페이스(31) 및 상기 제2 인터페이스(32)는 적어도 상기 커넥터 플러그(313)가 상기 제1 커넥터 잭(323)과 체결되는 제1 상대 위치 및 상기 커넥터 플러그(313)가 상기 제2 커넥터 잭(323)과 체결되는 제2 상대 위치에서, 상기 제1 인터페이스 평면(310)이 상기 제2 인터페이스 평면(320)에 맞닿아 배치되며, 서로에 커플링될 수 있는, 기계적 커플링.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17198992.4 | 2017-10-27 | ||
| EP17198992.4A EP3476548A1 (en) | 2017-10-27 | 2017-10-27 | Hardware module for a robotic system, and mechanical coupling |
| PCT/EP2018/079325 WO2019081662A1 (en) | 2017-10-27 | 2018-10-25 | MATERIAL MODULE FOR ROBOTIC SYSTEM, AND MECHANICAL COUPLING DEVICE |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200073232A true KR20200073232A (ko) | 2020-06-23 |
| KR102518007B1 KR102518007B1 (ko) | 2023-04-04 |
Family
ID=60191206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207012087A Active KR102518007B1 (ko) | 2017-10-27 | 2018-10-25 | 로봇 시스템에 대한 하드웨어 모듈 및 기계적 커플링 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11597076B2 (ko) |
| EP (2) | EP3476548A1 (ko) |
| KR (1) | KR102518007B1 (ko) |
| CN (1) | CN111432987B (ko) |
| DK (1) | DK3691838T3 (ko) |
| ES (1) | ES2930354T3 (ko) |
| WO (1) | WO2019081662A1 (ko) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108356806B (zh) * | 2017-12-19 | 2020-12-18 | 北京可以科技有限公司 | 模块化机器人控制方法及系统 |
| DE102018008648A1 (de) * | 2018-11-05 | 2020-05-07 | Günther Zimmer | System zur Funkanbindung einer Baugruppe an eine Steuerung |
| DE102019120116A1 (de) | 2019-07-25 | 2021-01-28 | Beckhoff Automation Gmbh | Aktives und passives Armmodul, Endmodul, Roboterarm und Industrieroboter |
| DE102019120135A1 (de) | 2019-07-25 | 2021-01-28 | Beckhoff Automation Gmbh | Armmodul für einen modularen Roboterarm eines Industrieroboters |
| DE102019120128A1 (de) | 2019-07-25 | 2021-01-28 | Beckhoff Automation Gmbh | Armmodul, Roboterarm und Industrieroboter |
| DE102019120131B4 (de) | 2019-07-25 | 2023-01-12 | Beckhoff Automation Gmbh | Optische Rotations-Übertragungseinrichtung für ein Automatisierungssystem, Armmodul für einen modularen Roboterarm sowie Industrieroboter |
| DE102019217126A1 (de) * | 2019-11-06 | 2021-05-06 | Continental Automotive Gmbh | Modularer roboter |
| IT201900024481A1 (it) * | 2019-12-18 | 2021-06-18 | Fondazione St Italiano Tecnologia | Robot modulare configurabile, procedimento e prodotto informatico corrispondenti |
| DE102020005381A1 (de) * | 2020-09-02 | 2022-03-03 | Günther Zimmer | Schichtmodul, Adaptersystem und Schichtmodulsystem |
| DE102020007794B3 (de) | 2020-12-19 | 2022-04-07 | Günther Zimmer | Handhabungssystem mit externer Steuerbaugruppe |
| DE102021105255B4 (de) * | 2021-03-04 | 2022-10-13 | Festo Se & Co. Kg | Vorrichtung mit über eine Verbindungsschnittstelle verbundenen Bauteilen und Verfahren zur Verbindung von Bauteilen |
| CN114932574A (zh) * | 2022-04-11 | 2022-08-23 | 深圳市大族机器人有限公司 | 关节组件及机械臂 |
| EP4596185A1 (de) * | 2024-01-30 | 2025-08-06 | IPR-Intelligente Peripherien für Roboter GmbH | Werkzeugschnittstelle sowie roboter mit einer solchen werkzeugschnittstelle |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1287868A2 (en) * | 2001-08-24 | 2003-03-05 | Xerox Corporation | Robotic toy with posable joints |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5155423A (en) * | 1986-02-18 | 1992-10-13 | Robotics Research Corporation | Industrial robot with servo |
| US5283393A (en) * | 1992-06-04 | 1994-02-01 | Berger Industries, Inc. | Armored flexible electrical conduit with fittings |
| US5293107A (en) * | 1993-02-24 | 1994-03-08 | Fanuc Robotics North America, Inc. | Motorized rotary joint and method of constructing a modular robot utilizing same |
| US5694813A (en) * | 1996-09-23 | 1997-12-09 | Nachi Robotics Systems Inc. | Industrial robot |
| DE19850452B4 (de) * | 1997-11-07 | 2013-12-12 | Nachi-Fujikoshi Corp. | Haltevorrichtung für Schaltverbindungen und Rohrleitungen eines Industrieroboters |
| US6636781B1 (en) * | 2001-05-22 | 2003-10-21 | University Of Southern California | Distributed control and coordination of autonomous agents in a dynamic, reconfigurable system |
| JP2003025269A (ja) * | 2001-07-12 | 2003-01-29 | National Aerospace Laboratory Of Japan | 回転修正機構付きオフセット回転関節ユニット |
| CN100572000C (zh) * | 2008-06-13 | 2009-12-23 | 哈尔滨工业大学 | 基于双转动自由度的万向式模块化自重构机器人 |
| US20100180711A1 (en) | 2009-01-19 | 2010-07-22 | Comau, Inc. | Robotic end effector system and method |
| EP2531327A4 (en) * | 2010-02-05 | 2014-08-06 | Univ California | SINGLE MODULAR ROBOTIC UNIT OR JOINT WITH FOUR FREQUENCY GRADES |
| US9475199B2 (en) | 2012-06-05 | 2016-10-25 | TRACLabs, Inc. | Apparatus, systems, and methods for reconfigurable robotic manipulator and coupling |
| JP6337432B2 (ja) * | 2013-09-10 | 2018-06-06 | セイコーエプソン株式会社 | 関節駆動装置及びロボット |
| US20150068350A1 (en) * | 2013-09-10 | 2015-03-12 | Seiko Epson Corporation | Robot arm and robot |
| CN104440941B (zh) * | 2013-09-13 | 2018-02-13 | 精工爱普生株式会社 | 机械手臂以及机器人 |
| WO2016045069A1 (en) * | 2014-09-26 | 2016-03-31 | Abb Technology Ltd | A routing unit, a rotary joint and a robot |
| EP3221096B1 (en) * | 2014-11-19 | 2023-06-14 | ABB Schweiz AG | A cable-management system, a rotary joint and a robot |
| GB2533314A (en) * | 2014-12-15 | 2016-06-22 | Indybo Ltd | Modular robotic system |
-
2017
- 2017-10-27 EP EP17198992.4A patent/EP3476548A1/en not_active Withdrawn
-
2018
- 2018-10-25 US US16/759,590 patent/US11597076B2/en active Active
- 2018-10-25 DK DK18789430.8T patent/DK3691838T3/da active
- 2018-10-25 CN CN201880070051.8A patent/CN111432987B/zh active Active
- 2018-10-25 WO PCT/EP2018/079325 patent/WO2019081662A1/en not_active Ceased
- 2018-10-25 EP EP18789430.8A patent/EP3691838B1/en active Active
- 2018-10-25 ES ES18789430T patent/ES2930354T3/es active Active
- 2018-10-25 KR KR1020207012087A patent/KR102518007B1/ko active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1287868A2 (en) * | 2001-08-24 | 2003-03-05 | Xerox Corporation | Robotic toy with posable joints |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3476548A1 (en) | 2019-05-01 |
| DK3691838T3 (da) | 2022-11-21 |
| US20200269417A1 (en) | 2020-08-27 |
| WO2019081662A9 (en) | 2019-08-01 |
| CN111432987B (zh) | 2023-05-05 |
| CN111432987A (zh) | 2020-07-17 |
| EP3691838B1 (en) | 2022-09-14 |
| EP3691838A1 (en) | 2020-08-12 |
| WO2019081662A1 (en) | 2019-05-02 |
| US11597076B2 (en) | 2023-03-07 |
| ES2930354T3 (es) | 2022-12-09 |
| KR102518007B1 (ko) | 2023-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102518007B1 (ko) | 로봇 시스템에 대한 하드웨어 모듈 및 기계적 커플링 | |
| US12325128B2 (en) | Method for operating a computer-based inventory of hardware modules of a robotic system | |
| US10953553B2 (en) | Gripping hand | |
| EP3372354B1 (en) | Modular robotic joint and reconfigurable robot made using the same | |
| CN109196429B (zh) | 用于确定操纵器的几何特性的方法、约束装置和系统 | |
| EP2796249B1 (en) | Programming of robots | |
| US20220105628A1 (en) | Obtaining the gear stiffness of a robot joint gear of a robot arm | |
| EP3636395B1 (en) | Robot with hot-swapped end effectors | |
| CN114174019B (zh) | 工业机器人 | |
| WO2023246995A1 (en) | Robot drive unit for robot joint | |
| EP3904014A1 (en) | System and method for robotic assembly | |
| CN112770874A (zh) | 机器人-手动引导设备 | |
| CN116457164A (zh) | 机器人 | |
| CN117295590A (zh) | 多节致动运动机构 | |
| Eshraghi et al. | Preliminary study on end-effector compliance in automated fluid coupling for trains | |
| EP4397454A1 (en) | A tool engagement coupling system and associated method | |
| WO1995007793A2 (en) | Force and position controlled manipulator | |
| EP4129587A1 (en) | Joint structure for robot | |
| HK1211538B (en) | Method and system for determination of at least one property of a joint |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |