KR20200074120A - 굴착기의 클램프 도구 - Google Patents
굴착기의 클램프 도구 Download PDFInfo
- Publication number
- KR20200074120A KR20200074120A KR1020207011386A KR20207011386A KR20200074120A KR 20200074120 A KR20200074120 A KR 20200074120A KR 1020207011386 A KR1020207011386 A KR 1020207011386A KR 20207011386 A KR20207011386 A KR 20207011386A KR 20200074120 A KR20200074120 A KR 20200074120A
- Authority
- KR
- South Korea
- Prior art keywords
- tool
- clamp
- tilt
- actuator
- input device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
- E02F3/437—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like providing automatic sequences of movements, e.g. linear excavation, keeping dipper angle constant
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
- E02F3/413—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with grabbing device
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
- E02F3/402—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with means for facilitating the loading thereof, e.g. conveyors
- E02F3/404—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with means for facilitating the loading thereof, e.g. conveyors comprising two parts movable relative to each other, e.g. for gripping
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
- E02F3/413—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with grabbing device
- E02F3/4135—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with grabbing device with grabs mounted directly on a boom
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/425—Drive systems for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2267—Valves or distributors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Paleontology (AREA)
- Operation Control Of Excavators (AREA)
- Shovels (AREA)
- Control And Other Processes For Unpacking Of Materials (AREA)
Abstract
Description
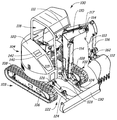
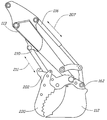
도 2는 본 발명의 일 실시예에 따른 대표적인 동력기계의 리프트 암과 유사한 리프트 암에 결합된 클램프 도구의 도면이다.
도 3은 본 발명의 예시적인 실시예에 따른 클램프 도구의 작동을 제어하는 시스템 도면이다.
도 4는 본 발명의 예시적인 실시예에 따른 버킷 및 클램프 도구를 제어하는 방법을 나타내는 흐름 다이아그램이다.
Claims (16)
- 프레임(102);
프레임에 결합되고, 리프트 암 구조물에 회전 가능하게 결합된 제1 도구(112)를 갖도록 구성된 리프트 암 구조물(110);
리프트 암 구조물에 결합되고, 리프트 암 구조물에 대한 제1 도구의 방향을 제어하도록 구성된 틸트 작동기(116);
리프트 암 구조물에 결합되고, 리프트 암 구조물 및 제1 도구에 대한 제2 도구의 방향을 제어하도록 구성된 제2 작동기(210);
작업자에 의하여 조작되고 반응하여 리프트 암 구조물에 대한 제1 도구의 방향을 제어하는 작업자의 의사를 나타내는 틸트 제어신호를 제공하도록 구성된 틸트 위치 입력장치(310);
틸트 위치 입력장치의 작동에 반응하여 틸트 작동기 및 제2 작동기를 제어하는 작업모드를 선택하기 위하여, 작업자에 의하여 조작되어 모드 선택 입력을 제공하도록 구성된 모드 제어 입력장치(305);
틸트 위치 입력장치 및 모드 제어 입력장치에 결합된 제어기(315)를 포함하고;
상기 제어기는 모드 선택 입력으로부터 수신된 신호에 기반하여 선택된 작업모드를 결정하도록 구성되고, 또한 제어기는 선택된 작업모드가 제1 작업모드이면 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 틸트 작동기만 제어되어 제1 도구가 제2 도구와 독립적으로 이동하고, 선택된 작업모드가 제2 작업모드이면 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 틸트 작동기와 제2 작동기 모두가 제어되어 제2 도구가 제1 도구의 동작을 자동적으로 따르도록 구성되는, 동력기계. - 제1항에 있어서, 상기 제1 도구(112)는 버킷이고, 제2 도구(220)는 클램프 도구인 동력기계.
- 제2항에 있어서, 상기 리프트 암 구조물에 피벗 가능하게 결합되고, 제1 도구(112)를 리프트 암 구조물에 회전 가능하게 결합하도록 구성된 제1 도구 캐리어(162) 및 리프트 암 구조물에 피벗 가능하게 결합되고 제2 도구(220)를 리프트 암 구조물에 회전 가능하게 결합하도록 구성된 제2 도구 캐리어(202)를 더 포함하는 동력기계.
- 제2항에 있어서, 적어도 하나의 유압펌프(322); 및 적어도 하나의 유압펌프, 틸트 작동기(116) 및 제2 작동기(210)에 유체공학적으로 결합된 제어밸브(320)를 더 포함하고,
상기 제어밸브는 제어기로부터 밸브 제어신호를 받아, 적어도 하나의 유압펌프로부터 틸트 작동기 및 제2 작동기까지의 가압 유압액의 공급량을 제어하는 동력기계. - 제4항에 있어서, 작업자에 의하여 조작되고 반응하여, 리프트 암 구조물 또는 제1 도구에 대한 클램프의 방향을 제어하는 작업자의 의사를 나타내는 클램프 제어신호를 제어기에 제공하도록 구성된 클램프 제어 입력장치를 더 포함하는 동력기계.
- 제5항에 있어서, 상기 제어기는 제1 작업모드에서, 클램프 제어 입력장치로부터의 클램프 제어신호에 반응하여 제2 작동기가 제어되도록 구성되는 동력기계.
- 제6항에 있어서, 상기 제어기는, 제2 작업모드에서 클램프 제어 입력장치로부터의 클램프 제어신호는 제어기가 제1 및 제2 도구 사이의 조정된 이동을 오버라이딩(overiiding)하게 하여, 틸트 작동기는 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 제어되고, 그리고 클램프 도구는 클램프 제어 입력장치로부터의 클램프 제어신호에 반응하여 제어되도록, 구성되는 동력기계.
- 동력기계의 리프트 암 구조물(110)에 대한 제1 도구의 방향을 제어하기 위하여 제1 도구(112)에 결합된 틸트 작동기(116)를 제어하고, 그리고 리프트 암 구조물 및 제1 도구에 대한 제2 도구의 방향을 제어하기 위하여 제2 도구(220)에 결합된 제2 작동기(210)를 제어하는 방법(400)으로서,
모드 선택 입력장치(305)로부터 모드 선택 입력을 수신하는 단계(402);
모드 선택 입력에 기반하여 제어기(315)를 사용하여 적어도 2개의 작업모드로부터 선택된 작업모드를 결정하는 단계(404, 408);
틸트 위치 입력장치(310)로부터 리프트 암 구조물에 대한 제1 도구의 방향을 제어하는 작업자 의사를 나타내는 틸트 제어신호를 수신하는 단계(406);
제어기를 사용하여, 선택된 작업모드가 제1 작업모드이면, 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 제1 도구가 제2 도구와 독립적으로 이동하도록 틸트 작동기만 제어하는 단계(410); 및
제어기를 사용하여, 선택된 작업모드가 제2 작업모드이면, 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 제2 도구가 제1 도구의 동작을 자동적으로 따르도록 틸트 작동기와 제2 작동기 모두를 제어하는 단계(412)를 포함하는 방법. - 제8항에 있어서, 상기 제1 도구는 버킷이고, 제2 도구는 클램프 도구인 방법.
- 제9항에 있어서, 상기 방법은 작업자에 의하여 조작되는 클램프 제어 입력장치로부터 클램프 제어신호를 수신하는 단계를 더 포함하고,
상기 제어기를 사용하여 선택된 작업모드가 제1 작업모드이면, 틸트 제어신호에 반응하여 틸트 작동기만을 제어하는 단계(410)는, 버킷에 대한 클램프 도구의 방향을 독립적으로 제어하도록 클램프 제어신호에 반응하여 제2 작동기를 제어하는 단계를 더 포함하는 방법. - 제10항에 있어서, 상기 제어기를 사용하여 선택된 작업모드가 제2 작업모드이면, 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 틸트 작동기와 제2 작동기 모두를 제어하는 단계(412)는, 클램프 제어 입력장치로부터의 클램프 제어신호의 수신하에, 틸트 작동기가 틸트 위치 입력장치의 틸트 제어신호에 반응하여 제어되고, 그리고 제2 작동기가 클램프 제어 입력장치의 클램프 제어신호에 반응하여 제어되도록 제1 및 제2 도구 사이의 조정된 이동을 오버라이딩(overriding)하는 단계를 더 포함하는 방법.
- 프레임(102);
프레임에 결합된 리프트 암 구조물(110);
리프트 암 구조물에 회전 가능하게 결합된 버킷(112);
리프트 암 구조물에 회전 가능하게 결합된 클램프 도구(220);
리프트 암 구조물 및 버킷에 결합되고, 리프트 암 구조물에 대한 버킷의 방향을 제어하도록 구성된 틸트 작동기(116);
리프트 암 구조물 및 클램프 도구에 결합되고, 리프트 암 구조물 및 버킷에 대한 클램프 도구의 방향을 제어하도록 구성된 클램프 작동기(210);
작업자에 의하여 조작되고 반응하여 리프트 암 구조물에 대한 버킷의 방향을 제어하는 작업자 의사를 나타내는 틸트 제어신호를 제공하도록 구성된 틸트 위치 입력장치(310);
작업자에 의하여 조작되고 반응하여 리프트 암 구조물 또는 버킷에 대한 클램프 도구의 방향을 제어하는 작업자 의사를 나타내는 클램프 제어신호를 제어기에 제공하도록 구성된 클램프 제어 입력장치;
틸트 작동기 및 클램프 작동기를 제어하는 작업모드를 선택하기 위하여 작업자에 의하여 조작되어 모드 선택 입력을 제공하도록 구성된 모드 제어 입력장치(305);
틸트 위치 입력장치, 클램프 제어 입력장치 및 모드 제어 입력장치에 결합된 제어기(315)를 포함하고;
상기 제어기는 모드 선택 입력장치에 기반하여 선택된 작업모드를 결정하도록 구성되고, 또한 제어기는 선택된 작업모드가 제1 작업모드이면 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 틸트 작동기만 제어되어 버킷이 클램프 도구와 독립적으로 이동하고, 그리고 선택된 작업모드가 제2 작업모드이면 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 틸트 작동기와 클램프 작동기 모두 제어되어 클램프 도구가 버킷의 동작을 자동적으로 따르도록 구성되는, 굴착기. - 제12항에 있어서, 상기 리프트 암 구조물에 피벗 가능하게 결합되고, 버킷(112)을 리프트 암 구조물에 회전 가능하게 결합하도록 구성된 제1 도구 캐리어(162) 및 리프트 암 구조물에 피벗 가능하게 결합되고 클램프 도구(220)를 리프트 암 구조물에 회전 가능하게 결합하도록 구성된 제2 도구 캐리어(202)를 더 포함하는 굴착기
- 제13항에 있어서, 적어도 하나의 유압펌프(322); 및 적어도 하나의 유압펌프, 틸트 작동기(116) 및 클램프 작동기(210)에 유체공학적으로 결합된 제어밸브(320)를 더 퍼함하고,
상기 제어밸브는 제어기로부터 밸브 제어신호를 받아, 적어도 하나의 유압펌프로부터 틸트 작동기 및 클램프 작동기까지의 가압 유압액의 공급량을 제어하는 굴착기 - 제14항에 있어서, 상기 제어기는 제1 작업모드에서, 클램프 제어 입력장치로부터의 클램프 제어신호에 반응하여 클램프 작동기가 제어되도록 구성되는 굴착기.
- 제15항에 있어서, 상기 제어기는, 제2 작업모드에서 클램프 제어 입력장치로부터의 클램프 제어신호는 제어기가 버킷 및 클램프 도구 사이의 조정된 이동을 오버라이딩(overiiding)하게 하여, 틸트 작동기는 틸트 위치 입력장치로부터의 틸트 제어신호에 반응하여 제어되고, 그리고 클램프 작동기는 클램프 제어 입력장치로부터의 클램프 제어신호에 반응하여 제어되도록, 구성되는 굴착기
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762580172P | 2017-11-01 | 2017-11-01 | |
| US62/580,172 | 2017-11-01 | ||
| PCT/US2018/058670 WO2019089899A1 (en) | 2017-11-01 | 2018-11-01 | Clamp implement for excavator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200074120A true KR20200074120A (ko) | 2020-06-24 |
| KR102644465B1 KR102644465B1 (ko) | 2024-03-06 |
Family
ID=64650472
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207011386A Active KR102644465B1 (ko) | 2017-11-01 | 2018-11-01 | 굴착기의 클램프 도구 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10711431B2 (ko) |
| EP (1) | EP3704312B1 (ko) |
| KR (1) | KR102644465B1 (ko) |
| CN (1) | CN111295482A (ko) |
| CA (1) | CA3081334C (ko) |
| ES (1) | ES2945142T3 (ko) |
| WO (1) | WO2019089899A1 (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10480154B2 (en) * | 2012-02-22 | 2019-11-19 | Clark Equipment Company | Implement carrier and implements |
| WO2018192850A1 (en) * | 2017-04-19 | 2018-10-25 | Rototilt Group Ab | Control systems for an excavator and methods for controlling an excavator with a movable excavator thumb and an auxiliary tool hold by a tiltrotator |
| CN110565712A (zh) * | 2019-09-16 | 2019-12-13 | 旷和明 | 一种建筑施工用挖掘机及其挖掘方法 |
| US12024173B2 (en) * | 2020-11-04 | 2024-07-02 | Deere & Company | System and method for work state estimation and control of self-propelled work vehicles |
| US12442159B2 (en) * | 2021-10-22 | 2025-10-14 | Oshkosh Corporation | Coordinated motion system and method |
| CN114215129B (zh) * | 2021-12-06 | 2023-02-21 | 徐州徐工挖掘机械有限公司 | 用于挖掘机的拇指夹持作业机具及其挖掘机 |
| US12460376B2 (en) * | 2023-02-28 | 2025-11-04 | Deere & Company | Elevation increment-decrement with slope control |
| US12448752B2 (en) | 2023-05-03 | 2025-10-21 | Caterpillar Inc. | Work tool position control |
| GB2630377A (en) * | 2023-05-26 | 2024-11-27 | Caterpillar Sarl | Controller for a Work Machine |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6385870B1 (en) * | 2001-07-06 | 2002-05-14 | Npk Construction Equipment, Inc. | Control system for an excavator thumb and a method of controlling an excavator thumb |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5375348A (en) * | 1992-04-23 | 1994-12-27 | Japanic Corporation | Deep excavator |
| US5472308A (en) * | 1994-04-26 | 1995-12-05 | Somero; Nick J. | Grapple mount |
| US5553408A (en) * | 1995-04-21 | 1996-09-10 | Townsend; Edward H. | Excavator bucket attachment |
| AU717522B2 (en) | 1996-12-13 | 2000-03-30 | Phillip V Bowman | Bucket clamp for excavator |
| US5813822A (en) * | 1997-01-09 | 1998-09-29 | Pacific Services & Manufacturing | Bucket and thumb combination as a quick decoupling attachment |
| US6135290A (en) * | 1998-06-05 | 2000-10-24 | Rockland Manufacturing Company | Sifter attachment for excavating machines and the like |
| US6742291B2 (en) * | 2001-08-06 | 2004-06-01 | Denis Frigon | Thumb for scooping tool arm |
| WO2004057114A1 (en) * | 2002-12-23 | 2004-07-08 | Metalgo S.R.L. | Auxiliary device for excavator and excavator provided with said device |
| US7240441B2 (en) * | 2004-02-12 | 2007-07-10 | Mccoy Ted | Excavator thumb for use with excavator equipment |
| US8024875B2 (en) | 2005-12-02 | 2011-09-27 | Clark Equipment Company | Compact excavator implement interface |
| US7383681B2 (en) | 2006-07-11 | 2008-06-10 | Caterpillar Inc. | Method and apparatus for coordinated linkage motion |
| US20090282710A1 (en) * | 2007-08-08 | 2009-11-19 | Johnson Rick D | Multi-Function Material Moving Assembly and Method |
| US7617619B2 (en) * | 2007-10-31 | 2009-11-17 | Entek Manufacturing, Inc. | Prehensile bucket attachment |
| US10480154B2 (en) * | 2012-02-22 | 2019-11-19 | Clark Equipment Company | Implement carrier and implements |
| CN203383252U (zh) * | 2013-06-14 | 2014-01-08 | 上海三一重机有限公司 | 一种挖掘机组装式拇指夹及挖掘机 |
| JP6013389B2 (ja) * | 2014-03-24 | 2016-10-25 | 日立建機株式会社 | 作業機械の油圧システム |
| US9404236B2 (en) * | 2014-10-09 | 2016-08-02 | Cascade Corporation | Thumb assembly having a stop |
| GB201506783D0 (en) * | 2015-04-21 | 2015-06-03 | Bamford Excavators Ltd | A method of mounting an attachment |
| US10774498B2 (en) * | 2016-03-23 | 2020-09-15 | Ami Attachments Inc. | Robust multi-tool assembly for hydraulic excavators |
-
2018
- 2018-11-01 CN CN201880070984.7A patent/CN111295482A/zh active Pending
- 2018-11-01 US US16/177,819 patent/US10711431B2/en active Active
- 2018-11-01 ES ES18815380T patent/ES2945142T3/es active Active
- 2018-11-01 EP EP18815380.3A patent/EP3704312B1/en active Active
- 2018-11-01 CA CA3081334A patent/CA3081334C/en active Active
- 2018-11-01 KR KR1020207011386A patent/KR102644465B1/ko active Active
- 2018-11-01 WO PCT/US2018/058670 patent/WO2019089899A1/en not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6385870B1 (en) * | 2001-07-06 | 2002-05-14 | Npk Construction Equipment, Inc. | Control system for an excavator thumb and a method of controlling an excavator thumb |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190127947A1 (en) | 2019-05-02 |
| EP3704312A1 (en) | 2020-09-09 |
| CA3081334A1 (en) | 2019-05-09 |
| WO2019089899A1 (en) | 2019-05-09 |
| CA3081334C (en) | 2024-01-02 |
| EP3704312B1 (en) | 2023-03-22 |
| US10711431B2 (en) | 2020-07-14 |
| ES2945142T3 (es) | 2023-06-28 |
| CN111295482A (zh) | 2020-06-16 |
| KR102644465B1 (ko) | 2024-03-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102644465B1 (ko) | 굴착기의 클램프 도구 | |
| US10494788B2 (en) | System and method for defining a zone of operation for a lift arm | |
| EP2971376B1 (en) | Improved implement performance | |
| CN101918647B (zh) | 用于旋转施工机械的液压控制系统 | |
| CN102713087B (zh) | 用于限制操作员对机具的控制的系统和方法 | |
| KR102378264B1 (ko) | 작업 기계 | |
| US11198987B2 (en) | Hydraulic circuit for a swing system in a machine | |
| US10858799B2 (en) | Tool stabilizer system | |
| US12467229B2 (en) | Work machine stabilization | |
| EP4026953B1 (en) | Control method for automatically selecting an operating mode of a work vehicle, corresponding control system and work vehicle comprising the control system | |
| WO2025204720A1 (ja) | 作業機械システムおよび作業機械の制御方法 | |
| US10392773B2 (en) | Linkage assembly for machine | |
| KR20260003850A (ko) | 적재 기계의 제어 장치, 적재 기계의 제어 방법 및 원격 조작 시스템 | |
| WO2025028105A1 (ja) | 作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システム | |
| WO2025204565A1 (ja) | 作業機械システムおよび作業機械の制御方法 | |
| WO2025028107A1 (ja) | 作業機械の制御システム、作業機械の制御方法および作業機械の遠隔操作システム | |
| WO2024190914A1 (ja) | 作業機械の制御装置、遠隔操作システムおよび制御方法 | |
| KR20250044417A (ko) | 작업 기계 | |
| JP2026004735A (ja) | 作業機械の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200420 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20211027 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230329 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20231016 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20230329 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20231016 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20230605 Comment text: Amendment to Specification, etc. |
|
| PX0701 | Decision of registration after re-examination |
Patent event date: 20240221 Comment text: Decision to Grant Registration Patent event code: PX07013S01D Patent event date: 20240111 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I Patent event date: 20231016 Comment text: Decision to Refuse Application Patent event code: PX07011S01I Patent event date: 20230605 Comment text: Amendment to Specification, etc. Patent event code: PX07012R01I |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240304 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240304 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |